![]() पाण्डरView 2
पाण्डरView 2
पोइन्ट क्लाउड
भिजुअलाइजेशन सफ्टवेयर
प्रयोगकर्ता पुस्तिका
पाण्डरView २ पोइन्ट क्लाउड भिजुअलाइजेशन सफ्टवेयर
www.hesaitech.com
 HESAI Wechat
HESAI Wechat
http://weixin.qq.com/r/Fzns9IXEl9jorcGX92wF
कागजात संस्करण: PV2-en-230710
यस म्यानुअल बारे
■ यो पुस्तिका प्रयोग गर्दै
- तपाइँको पहिलो प्रयोग गर्नु अघि यो प्रयोगकर्ता पुस्तिका मार्फत पढ्न निश्चित गर्नुहोस् र तपाइँ उत्पादन सञ्चालन गर्दा यहाँ निर्देशनहरू पालना गर्नुहोस्। निर्देशनहरूको पालना गर्न असफल भएमा उत्पादन क्षति, सम्पत्ति हानि, व्यक्तिगत चोटपटक, र/वा वारेन्टीको उल्लङ्घन हुन सक्छ।
- यो प्रयोगकर्ता पुस्तिकाले उत्पादन प्रमाणीकरणमा जानकारी समावेश गर्दैन। कृपया उत्पादनको तल्लो प्लेटमा प्रमाणीकरण चिन्हहरू जाँच गर्नुहोस् र सम्बन्धित प्रमाणीकरण चेतावनीहरू पढ्नुहोस्।
- यदि तपाईंले आफ्नो उत्पादन (हरू) मा यो lidar उत्पादन समावेश गर्नुभयो भने, तपाईंले आफ्नो उत्पादन (हरू) को उद्देश्य प्रयोगकर्ताहरूलाई यो प्रयोगकर्ता पुस्तिका (वा यो प्रयोगकर्ता पुस्तिका पहुँच गर्ने माध्यमहरू) प्रदान गर्न आवश्यक छ।
- यो lidar उत्पादन अन्त उत्पादन को एक घटक को रूप मा अभिप्रेत छ। यो सान्दर्भिक मापदण्ड अनुसार अन्तिम उत्पादन मा मूल्याङ्कन गरिनेछ।
■ यो पुस्तिकामा पहुँच
नवीनतम संस्करण प्राप्त गर्न:
- हेसाईको आधिकारिक डाउनलोड पृष्ठमा जानुहोस् webसाइट: https://www.hesaitech.com/en/download
- वा Hesai मा आफ्नो बिक्री प्रतिनिधिलाई सम्पर्क गर्नुहोस्
- वा Hesai को प्राविधिक सहयोग टोलीलाई सम्पर्क गर्नुहोस्: service@hesaitech.com
■ प्राविधिक सहयोग
यदि तपाईंको प्रश्न यस प्रयोगकर्ता पुस्तिकामा सम्बोधन गरिएको छैन भने, कृपया हामीलाई यहाँ सम्पर्क गर्नुहोस्:
service@hesaitech.com
www.hesaitech.com/en/support
https://github.com/HesaiTechnology (कृपया सम्बन्धित GitHub परियोजनाहरू अन्तर्गत आफ्ना प्रश्नहरू छोड्नुहोस्।)
■ किंवदन्तीहरू
![]() चेतावनी: निर्देशनहरू जुन उत्पादनको सुरक्षित र उचित प्रयोग सुनिश्चित गर्न पालना गर्नुपर्छ।
चेतावनी: निर्देशनहरू जुन उत्पादनको सुरक्षित र उचित प्रयोग सुनिश्चित गर्न पालना गर्नुपर्छ।
![]() नोट: थप जानकारी उपयोगी हुन सक्छ।
नोट: थप जानकारी उपयोगी हुन सक्छ।
परिचय
पाण्डरView २ दोस्रो पुस्ताको सफ्टवेयर हो जसले Hesai lidars बाट पोइन्ट क्लाउड डाटा रेकर्ड र प्रदर्शन गर्दछ, यसमा उपलब्ध छ:
- 64-बिट विन्डोज 10
- Ubuntu 16.04/18.04/20.04
![]() यदि तपाईको कम्प्युटरले AMD ग्राफिक्स कार्ड प्रयोग गर्दछ र Ubuntu-20.04 मा चल्छ भने, कृपया AMD को आधिकारिकबाट Ubuntu-20.04 लाई समर्थन गर्ने ग्राफिक्स ड्राइभर डाउनलोड गर्नुहोस्। webसाइट। थप निर्देशनहरूको लागि, कृपया Hesai प्राविधिक सहयोगलाई सम्पर्क गर्नुहोस्।
यदि तपाईको कम्प्युटरले AMD ग्राफिक्स कार्ड प्रयोग गर्दछ र Ubuntu-20.04 मा चल्छ भने, कृपया AMD को आधिकारिकबाट Ubuntu-20.04 लाई समर्थन गर्ने ग्राफिक्स ड्राइभर डाउनलोड गर्नुहोस्। webसाइट। थप निर्देशनहरूको लागि, कृपया Hesai प्राविधिक सहयोगलाई सम्पर्क गर्नुहोस्।
यो म्यानुअलले पाण्डरको वर्णन गर्दछView २.०.१०१। समर्थित उत्पादन मोडेल:
| पाण्डर ४० Pandar40M Pandar40P पाण्डर ४० |
Pandar128E3X | PandarQT QT128C2X |
PandarXT PandarXT-16 XT32M2X |
AT128E2X | FT120 |
स्थापना
स्थापना डाउनलोड गर्नुहोस् fileहेसाईका अधिकारीबाट webसाइट, वा प्राविधिक समर्थन सम्पर्क गर्नुहोस्: www.hesaitech.com/en/download
| प्रणाली | स्थापना Files |
| विन्डोज | पाण्डरView_Release_Win64_V2.x.xx.msi |
| Ubuntu | पाण्डरView_Release_Ubuntu_V2.x.xx.bin |
![]() Ubuntu मा, Pandar चलाउनुहोस्View.sh in a file ASCII वर्णहरू मात्र समावेश गर्ने पथ।
Ubuntu मा, Pandar चलाउनुहोस्View.sh in a file ASCII वर्णहरू मात्र समावेश गर्ने पथ।
सफ्टवेयर इन्टरफेसलाई तल देखाइए अनुसार चार खण्डहरूमा विभाजन गरिएको छ (विवरण फरक हुन सक्छ)।
मेनु पट्टीमा "बारेमा" सफ्टवेयर संस्करण देखाउँछ।
लाइभ प्वाइन्ट क्लाउड जाँच गर्नुहोस्
आफ्नो PC मा डाटा प्राप्त गर्न, PC को IP ठेगाना 192.168.1.100 र सबनेट मास्क 255.255.255.0 मा सेट गर्नुहोस्।
| उबुन्टुका लागि: | विन्डोजका लागि: |
| टर्मिनलमा यो ifconfig आदेश इनपुट गर्नुहोस्: ~$ sudo ifconfig enp0s20f0u2 192.168.1.100 (स्थानीय इथरनेट पोर्ट नामको साथ enp0s20f0u2 प्रतिस्थापन गर्नुहोस्) |
नेटवर्क साझेदारी केन्द्र खोल्नुहोस्, "इथरनेट" मा क्लिक गर्नुहोस्। "इथरनेट स्थिति" बाकसमा, "गुणहरू" मा क्लिक गर्नुहोस्। "इन्टरनेट प्रोटोकल संस्करण 4 (TCP/IPv4)" मा डबल-क्लिक गर्नुहोस्। IP ठेगानालाई 192.168.1.100 र सबनेट मास्कलाई 255.255.255.0 मा कन्फिगर गर्नुहोस् |
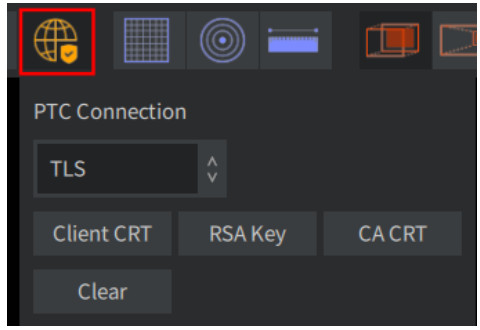
3.1 साइबर सुरक्षा कन्फिगरेसन
साइबरसुरक्षालाई समर्थन गर्ने उत्पादन मोडेलहरूको लागि, ![]() (साइबर सुरक्षा) उपकरणपट्टीमा देखा पर्नेछ।
(साइबर सुरक्षा) उपकरणपट्टीमा देखा पर्नेछ।
प्रयोगकर्ताहरूले तीन मोडहरू मध्ये एउटा चयन गर्न सक्छन्:
■ TLS मोड
TLS मोडमा, PandarView 2 ले स्वचालित रूपमा लिडर एकाइको सुधार पुन: प्राप्त गर्दछ filePTCS (TLS मा PTC) आदेशहरू प्रयोग गर्दै।
| को सुरक्षा पृष्ठ web नियन्त्रण | साइबर सुरक्षा मास्टर स्विच खोल्नुहोस्। |
| PTC जडानको लागि TLS चयन गर्नुहोस्। | |
| पाण्डरView 2 | PTC जडानको लागि TLS चयन गर्नुहोस्। |
| "CA CRT" बटनमा क्लिक गर्नुहोस् र निर्दिष्ट गर्नुहोस् file Hesai को CA प्रमाणपत्र श्रृंखला (Hesai_Ca_Chain.crt) को मार्ग। |
■ mTLS मोड
mTLS मोडमा, PandarView 2 ले स्वचालित रूपमा लिडर एकाइको सुधार पुन: प्राप्त गर्दछ filePTCS आदेशहरू प्रयोग गर्दै।
| को सुरक्षा पृष्ठ web नियन्त्रण | साइबर सुरक्षा मास्टर स्विच खोल्नुहोस्। |
| PTC जडानको लागि mTLS चयन गर्नुहोस्; प्रयोगकर्ता CA प्रमाणपत्र श्रृंखला अपलोड गर्नुहोस्। | |
| पाण्डरView 2 | PTC जडानको लागि mTLS चयन गर्नुहोस्। |
| "CA CRT" बटन क्लिक गर्नुहोस्; निर्दिष्ट गर्नुहोस् file Hesai CA प्रमाणपत्र श्रृंखला (Hesai_Ca_Chain.crt) को मार्ग। | |
| "ग्राहक CRT" बटन क्लिक गर्नुहोस्; निर्दिष्ट गर्नुहोस् file प्रयोगकर्ता अन्त-इकाई प्रमाणपत्रको मार्ग। | |
| "RSA कुञ्जी" बटन क्लिक गर्नुहोस्; निर्दिष्ट गर्नुहोस् file प्रयोगकर्ताको निजी कुञ्जीको मार्ग (प्रयोगकर्ताको अन्त-इकाई प्रमाणपत्रसँग सम्बन्धित)। |
![]() "स्पष्ट" बटनले निर्दिष्ट हटाउँछ file CA CRT, ग्राहक CRT, र RSA कुञ्जीका लागि मार्गहरू।
"स्पष्ट" बटनले निर्दिष्ट हटाउँछ file CA CRT, ग्राहक CRT, र RSA कुञ्जीका लागि मार्गहरू।
■ साइबर सुरक्षा बन्द
यस मोडमा, पाण्डरView 2 ले स्वचालित रूपमा लिडर एकाइको सुधार पुन: प्राप्त गर्दछ filePTC आदेशहरू प्रयोग गर्दै।
| को सुरक्षा पृष्ठ web नियन्त्रण | साइबर सुरक्षा मास्टर स्विच बन्द गर्नुहोस् |
| पाण्डरView 2 | PTC जडानको लागि गैर-TLS चयन गर्नुहोस् |
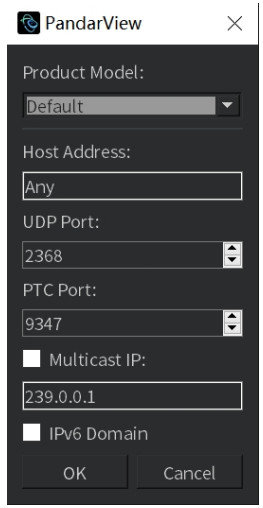
3.2 प्रत्यक्ष डाटा प्राप्त गर्नुहोस्
- उपकरणपट्टी:
 (नेट सुन्नुहोस्)
(नेट सुन्नुहोस्) - पप-अप संवाद बक्समा:
| उत्पादन मोडेल | पूर्वनिर्धारित |
| होस्ट ठेगाना | कुनै पनि |
| UDP पोर्ट | को सेटिङ पृष्ठमा "Lidar गन्तव्य पोर्ट" जस्तै हुनुपर्छ web नियन्त्रण। 2368 पूर्वनिर्धारित रूपमा। |
| PTC पोर्ट | PTC आदेशहरू प्रसारण गर्न प्रयोग गरिन्छ। पूर्वनिर्धारित रूपमा 9347। |
| मल्टिकास्ट आईपी | मल्टिकास्ट मोडमा, चेक बाकस जाँच गर्नुहोस् र बहुकास्ट समूह निर्दिष्ट गर्नुहोस् |
| IPv6 डोमेन | केही उत्पादन मोडेलहरूमा मात्र समर्थित |
![]() प्रत्यक्ष डाटा प्राप्त गर्दा:
प्रत्यक्ष डाटा प्राप्त गर्दा:
- प्रयोगकर्ताहरूले कोण सुधार निर्यात गर्न सक्छन् file र फायरिङ समय सुधार file, खण्ड ५.१ (पोइन्ट क्लाउड सुधार) हेर्नुहोस्।
 कन्सोलमा रहेको (लाइभ स्ट्रिमिङ) बटनले लाइभ डाटाको न्यूनतम विलम्बता स्ट्रिमिङलाई अनुमति दिन्छ।
कन्सोलमा रहेको (लाइभ स्ट्रिमिङ) बटनले लाइभ डाटाको न्यूनतम विलम्बता स्ट्रिमिङलाई अनुमति दिन्छ।
![]()
3.3 रेकर्ड लाइभ डाटा
क्लिक गर्नुहोस् ![]() (रेकर्ड) कन्सोलमा र निर्दिष्ट गर्नुहोस् file निर्देशिका। .pcap रेकर्ड गर्न सुरु गर्न "बचत गर्नुहोस्" मा क्लिक गर्नुहोस् file.
(रेकर्ड) कन्सोलमा र निर्दिष्ट गर्नुहोस् file निर्देशिका। .pcap रेकर्ड गर्न सुरु गर्न "बचत गर्नुहोस्" मा क्लिक गर्नुहोस् file.
![]() pcap नामकरण गर्दा files Ubuntu मा, समावेश गर्नुहोस् fileनाम विस्तार (.pcap)।
pcap नामकरण गर्दा files Ubuntu मा, समावेश गर्नुहोस् fileनाम विस्तार (.pcap)।
प्ले ब्याक पोइन्ट क्लाउड
4.1 .PCAP खोल्नुहोस् File
- क्लिक गर्नुहोस्
 (खोल्नुहोस् File) उपकरणपट्टीमा र .pcap चयन गर्नुहोस् file पप-अप विन्डोमा।
(खोल्नुहोस् File) उपकरणपट्टीमा र .pcap चयन गर्नुहोस् file पप-अप विन्डोमा।
वैकल्पिक रूपमा, .pcap तान्नुहोस् file Pandar माView 2. - लोडिङ पूरा भएपछि, कन्सोलमा पोइन्ट क्लाउड ट्र्याक देखा पर्नेछ।

![]() नोटहरू
नोटहरू
- tcpdump pcap ढाँचालाई मात्र समर्थन गर्नुहोस्।
- एक पटकमा एक बिन्दु क्लाउड ट्र्याकलाई मात्र समर्थन गर्नुहोस्: लाइभ डाटा प्राप्त गर्दा वा नयाँ .pcap खोल्दा file, अघिल्लो ट्र्याक स्वतः मेटिनेछ।
- ठूलो .pcap files लोड हुन केही समय लाग्न सक्छ। लोड गर्दा, क्लिक गर्नुहोस् (लाइभ स्ट्रिमिङ) बिन्दु क्लाउड डेटा एकै पटक प्ले गर्न।
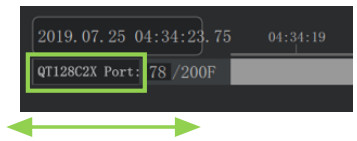
- यदि lidar उत्पादन मोडेल र पोर्ट नम्बर पूर्ण रूपमा प्रदर्शित छैन भने, माउस व्हील स्क्रोल गर्नुहोस्।
4.2 प्ले नियन्त्रण 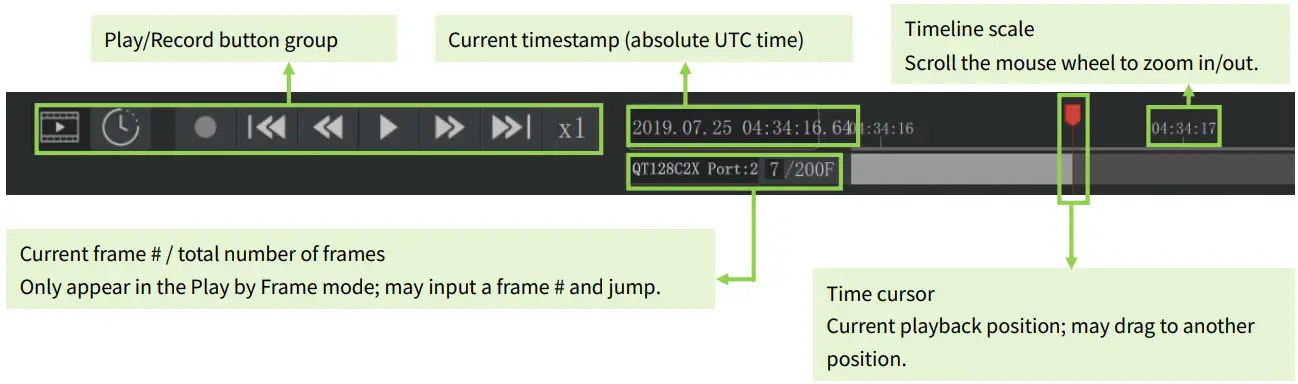
| बटन | विवरण |
 |
बायाँ: फ्रेमद्वारा खेल्नुहोस् (पूर्वनिर्धारित) दायाँ: समय अनुसार खेल्नुहोस् |
 |
सुरु वा अन्त्यमा जानुहोस् file |
 |
बायाँ: रिवाइन्डिङ गति समायोजन गर्नुहोस् (1x, 1/2x, 1/4x, 1/8x, …, 1/64x) दायाँ: फर्वार्डिङ गति समायोजन गर्नुहोस् (1x, 2x, 4x, 8x, …, 64x) |
 |
बायाँ: लोड गरेपछि ए file, खेल्न क्लिक गर्नुहोस्। दायाँ: खेल्दा ए file, पज गर्न क्लिक गर्नुहोस्। |
 |
हालको गति प्रदर्शन गर्नुहोस् |
| लोड गर्दा ए file, एकै पटक खेल्न क्लिक गर्नुहोस्। (लोडिङ पूरा भएपछि यो बटन गायब हुन्छ।) प्रत्यक्ष डाटा प्राप्त गर्दा, न्यूनतम विलम्बताको साथ स्ट्रिम गर्न क्लिक गर्नुहोस्। |
सुधार र कन्फिगरेसन
लाइभ पोइन्ट क्लाउड जाँच गर्दा वा रेकर्ड गरिएको बिन्दु क्लाउड ब्याक प्ले गर्दा, सुधार files र कन्फिगरेसन files प्रयोग गर्न सकिन्छ।
5.1 बिन्दु क्लाउड सुधार
| कोण सुधार | अजिमुथ र उचाइ डेटा सच्याउनुहोस्। लिडर प्रयोगकर्ता पुस्तिकामा खण्ड 1.3 (च्यानल वितरण) हेर्नुहोस्। |
| फायरटाइम सुधार | निश्चित उत्पादन मोडेलहरूका लागि: प्रत्येक च्यानलको फायरिङ समय अनुसार पोइन्ट क्लाउड डेटाको अजीमुथ सही गर्नुहोस्। |
| दूरी सुधार | निश्चित उत्पादन मोडेलहरूको लागि: दूरी डाटा सच्याउनुहोस्। |
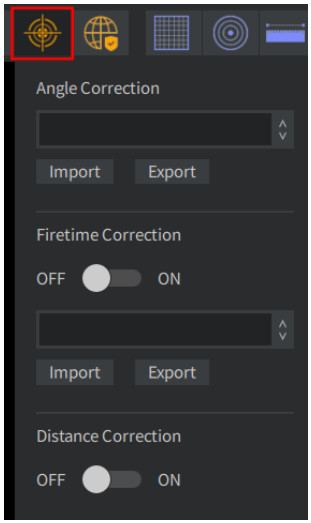
क्लिक गर्नुहोस् ![]() (सुधार) उपकरणपट्टीमा:
(सुधार) उपकरणपट्टीमा:
| सुधार को प्रकार | विवरण |
| कोण सुधार | लाइभ पोइन्ट क्लाउड जाँच गर्दा: • पाण्डरView 2 स्वचालित रूपमा सुधार पुन: प्राप्त file यस lidar एकाई को। रेकर्ड गरिएको बिन्दु क्लाउड ब्याक प्ले गर्दा: • पाण्डरView 2 स्वचालित रूपमा सामान्य सुधार अपलोड गर्दछ file यस उत्पादन मोडेलको लागि। • उत्कृष्ट प्रदर्शनको लागि, "आयात गर्नुहोस्" मा क्लिक गर्नुहोस् र सुधार चयन गर्नुहोस् file यस lidar एकाई को। |
| फायरटाइम सुधार | QT128C2X: • प्रत्यक्ष बिन्दु क्लाउड जाँच गर्दा: PandarView 2 स्वचालित रूपमा सुधार पुन: प्राप्त file यस lidar एकाइ को; ON मा स्विच गर्नुहोस् र सुधार सुरु गर्नुहोस्। • रेकर्ड गरिएको बिन्दु क्लाउड: पाण्डर ब्याक प्ले गर्दाView २ स्वचालित रूपमा सामान्य सुधार अपलोड गर्दछ file यस उत्पादन मोडेलको लागि; ON मा स्विच गर्नुहोस् र सुधार सुरु गर्नुहोस्। अन्य उत्पादन मोडेल: • अनमा स्विच गर्नुहोस्, "आयात गर्नुहोस्" मा क्लिक गर्नुहोस् र सुधार चयन गर्नुहोस् file यस lidar एकाई को। • यदि लिडर एकाइको सुधार file स्थानीय रूपमा उपलब्ध छैन, खोल्नुहोस् र सामान्य सुधार चयन गर्नुहोस् file ड्रप-डाउन मेनुमा यो उत्पादन मोडेलको लागि। |
| दूरी सुधार | ON मा स्विच गर्नुहोस्। |
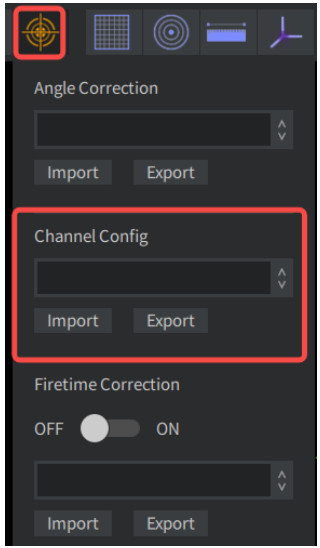
5.2 च्यानल कन्फिगरेसन
च्यानल कन्फिगरेसन file लिडरको सबै उपलब्ध च्यानलहरूबाट एउटा उपसेट चयन गर्दछ, पोइन्ट क्लाउड डाटा प्याकेटमा ब्लकहरूको संख्या परिभाषित गर्दछ, र प्रत्येक ब्लकमा भण्डारण गरिने च्यानलहरू निर्दिष्ट गर्दछ।
QT128C2X को लागि मात्र उपलब्ध:
- प्रत्यक्ष बिन्दु क्लाउड जाँच गर्दा: PandarView 2 स्वचालित रूपमा च्यानल कन्फिगरेसन पुन: प्राप्त file यस lidar एकाई को।
- रेकर्ड गरिएको बिन्दु क्लाउड ब्याक प्ले गर्दा: क्लिक गर्नुहोस्
 (सुधार) उपकरणपट्टीमा, च्यानल कन्फिगरेसन खण्डमा "आयात गर्नुहोस्" मा क्लिक गर्नुहोस्, र च्यानल कन्फिगरेसन चयन गर्नुहोस्। file यस lidar एकाई को।
(सुधार) उपकरणपट्टीमा, च्यानल कन्फिगरेसन खण्डमा "आयात गर्नुहोस्" मा क्लिक गर्नुहोस्, र च्यानल कन्फिगरेसन चयन गर्नुहोस्। file यस lidar एकाई को।
5.3 File आयात र निर्यात
File आयात
- प्रत्यक्ष बिन्दु क्लाउड जाँच गर्दा, "निर्यात" बटन सुधार वा कन्फिगरेसन डाउनलोड गर्न प्रयोग गर्न सकिन्छ fileयस lidar एकाइको s।
- यी नामाकरण गर्दा fileUbuntu मा, समावेश गर्न निश्चित गर्नुहोस् fileनाम विस्तार (. कोण सुधार को लागी dat fileAT परिवारको s, र अरूको लागि .csv)।
File निर्यात
- आयात गरिएको सुधार वा कन्फिगरेसन files ड्रप-डाउन मेनुको तल थपिएको छ।
- यदि तपाईंलाई अब ती आवश्यक छैन भने files, तपाईंले तिनीहरूलाई निम्न मार्गबाट मेटाउन सक्नुहुन्छ (Pandar पुन: सुरु गरेपछि प्रभावकारीView 2): कागजातहरू \ PandarViewडाटाFiles\csv
अन्य सुविधाहरू
6.1 माउस सर्टकटहरू
| बायाँ-बटन तान्नुहोस् | बिन्दु क्लाउड घुमाउनुहोस् |
| दायाँ-बटन तान्नुहोस् | जुम इन/आउट: जुम आउट गर्न बायाँ तान्नुहोस्, र जुम इन गर्न दायाँ |
| व्हील स्क्रोल गर्नुहोस् | जुम इन/आउट गर्नुहोस्: जुम आउट गर्न तल स्क्रोल गर्दै, र जुम इन गर्न माथि |
| व्हील थिच्नुहोस् र तान्नुहोस् | प्यान गर्नुहोस् view |
| शिफ्ट र बायाँ-बटन तान्नुहोस् | बिन्दु बादल वरिपरि घुमाउनुहोस् viewing दिशा (बाट दिशा viewनिर्देशांकको उत्पत्तिलाई संकेत गर्नुहोस्) |
| शिफ्ट र दायाँ-बटन तान्नुहोस् | प्यान गर्नुहोस् view |
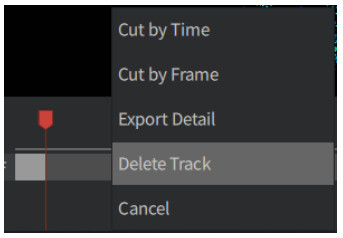
6.2 पोइन्ट क्लाउड ट्र्याकहरू
बिन्दु क्लाउड ट्र्याकमा दायाँ क्लिक गर्नुहोस्:
| समय अनुसार काट्नुहोस् | सुरु/अन्तको समय निर्दिष्ट गर्नुहोस्amps, हालको ट्र्याक काट्नुहोस्, र नयाँ .pcap मा बचत गर्नुहोस् file. |
| फ्रेम द्वारा काट्नुहोस् | सुरु/अन्त फ्रेमहरू निर्दिष्ट गर्नुहोस्, हालको ट्र्याक काट्नुहोस्, र नयाँ .pcap मा बचत गर्नुहोस् file. |
| निर्यात विवरण | बिन्दुहरूको क्षेत्र चयन गरेपछि (खण्ड 6.3 टूलबार - बिन्दु चयन र डेटा तालिका हेर्नुहोस्), सुरु/अन्त फ्रेमहरू निर्दिष्ट गर्नुहोस् र सम्बन्धित बिन्दु क्लाउड डेटालाई .csv मा निर्यात गर्नुहोस्। files. · प्रयोग गर्नुहोस् · यी नामकरण गर्दा fileUbuntu मा, समावेश गर्न निश्चित गर्नुहोस् fileनाम विस्तार (.csv)। |
| ट्र्याक मेटाउनुहोस् | हालको ट्र्याक मेटाउनुहोस्। |
| रद्द गर्नुहोस् | दायाँ क्लिक मेनु बन्द गर्नुहोस्। |
४.५.१ उपकरणपट्टी
यदि पाण्डरView 2 सञ्झ्याल धेरै साँघुरो छ टूलबार पूर्ण रूपमा प्रदर्शन गर्न, माउस व्हील स्क्रोल गर्नुहोस् view सबै बटनहरू।
■ समन्वय ग्रिड, समन्वय प्रणाली, र दूरी मापन 
| बटन नाम | कार्य |
| कार्टेसियन | 30 मिटर दूरीको साथ ग्रिडहरू देखाउनुहोस्/लुकाउनुहोस् |
| ध्रुवीय | 10 मिटर स्पेसिङको साथ बराबरी सर्कलहरू देखाउनुहोस्/लुकाउनुहोस् |
| शासक | दुई बिन्दुहरू बीचको दूरी मापन गर्न बायाँ-बटन तान्नुहोस् |
| समन्वय गर्दछ | आयताकार समन्वय प्रणाली देखाउनुहोस् |
■ प्रक्षेपण मोडहरू

| बटन नाम | कार्य |
| अर्थोग्राफिक प्रक्षेपण | – |
| परिप्रेक्ष्य प्रक्षेपण | – |
■ बिन्दु View र स्पिनिङ
| बटन नाम | कार्य |
| अगाडि/पछाडि/बायाँ/दायाँ/शीर्ष | – |
| स्पिन | स्पिन गर्नुहोस् viewing दिशा (बाट दिशा viewZ-अक्ष वरिपरि निर्देशांकहरूको उत्पत्तिलाई संकेत गर्नुहोस् |
■ च्यानल चयन 
क्लिक गर्नुहोस् ![]() (च्यानलहरू) लाई view वा हाल प्रदर्शित च्यानलहरू परिवर्तन गर्नुहोस्।
(च्यानलहरू) लाई view वा हाल प्रदर्शित च्यानलहरू परिवर्तन गर्नुहोस्।
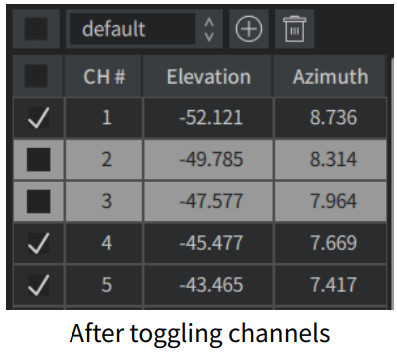
च्यानलहरू प्रदर्शन वा लुकाउनुहोस्
- यसको पोइन्ट क्लाउड डाटा प्रदर्शन/लुकाउनको लागि प्रत्येक च्यानलको बाँयामा रहेको बक्सहरूलाई जाँच गर्नुहोस्/अनचेक गर्नुहोस्।
- पूर्वनिर्धारित रूपमा, सबै च्यानलहरू प्रदर्शित हुन्छन्।
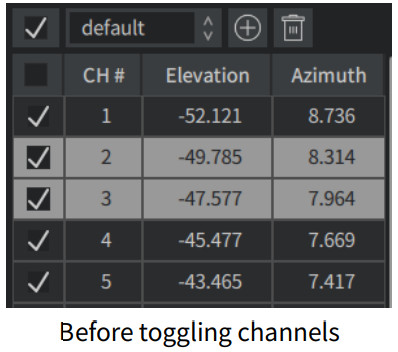
च्यानलहरू चयन गर्नुहोस् र टगल गर्नुहोस्
- यो च्यानल चयन गर्न र हाइलाइट गर्न च्यानल (यसको चेकबक्सको क्षेत्र बाहेक) मा क्लिक गर्नुहोस्।
- धेरै छिमेकी च्यानलहरू चयन गर्न क्लिक गर्दा शिफ्ट होल्ड गर्नुहोस्।
- धेरै अलग च्यानलहरू चयन गर्न क्लिक गर्दा Ctrl होल्ड गर्नुहोस्।
- क्लिक गर्नुहोस्
 (चयन गरिएको च्यानलहरू टगल गर्नुहोस्) शीर्ष-बायाँ कुनामा चयन गरिएका च्यानलहरू जाँच गरिएको र अनचेक बीचमा टगल गर्न।
(चयन गरिएको च्यानलहरू टगल गर्नुहोस्) शीर्ष-बायाँ कुनामा चयन गरिएका च्यानलहरू जाँच गरिएको र अनचेक बीचमा टगल गर्न।
च्यानल समूहहरू बचत गर्नुहोस्
- क्लिक गर्नुहोस्
 जाँच गरिएका च्यानलहरूलाई कन्फिगरेसनको रूपमा बचत गर्न र यसलाई नाम दिनुहोस्।
जाँच गरिएका च्यानलहरूलाई कन्फिगरेसनको रूपमा बचत गर्न र यसलाई नाम दिनुहोस्। - पाण्डर पुन: सुरु गरेपछि पहिले बचत गरिएका कन्फिगरेसनहरू अवस्थित छन्View 2 र मा चयन गर्न सकिन्छ
 ड्रप-डाउन मेनु।
ड्रप-डाउन मेनु। - हाल चयन गरिएको कन्फिगरेसन मेटाउन, क्लिक गर्नुहोस्
 .
.
■ बिन्दु चयन र डेटा तालिका
क्लिक गर्नुहोस् ![]() (चयन गर्नुहोस्) र बिन्दुहरूको क्षेत्र हाइलाइट गर्न माउस तान्नुहोस्।
(चयन गर्नुहोस्) र बिन्दुहरूको क्षेत्र हाइलाइट गर्न माउस तान्नुहोस्।
क्लिक गर्नुहोस् ![]() (स्प्रेड शीट) मा view हाइलाइट गरिएका बिन्दुहरूको डेटा, तल देखाइएको रूपमा।
(स्प्रेड शीट) मा view हाइलाइट गरिएका बिन्दुहरूको डेटा, तल देखाइएको रूपमा। 
धेरै पटक हेडिङ फिल्डमा डबल-क्लिक गर्दा, निम्न कार्यहरू एक पटकमा गरिन्छ:
- फिल्डको नाममा स्तम्भ चौडाइ अनुकूल गर्नुहोस्
(वैकल्पिक रूपमा, माउस कर्सरलाई दुई शीर्षकहरू बीचमा राख्नुहोस् ताकि कर्सर बायाँ-दायाँ तीर बनोस्; स्तम्भ चौडाइ समायोजन गर्न माउस तान्नुहोस्।) - यस क्षेत्रलाई बढ्दो क्रममा क्रमबद्ध गर्नुहोस्। एउटा माथिको तीर
 दायाँ मा देखा पर्नेछ।
दायाँ मा देखा पर्नेछ। - यो क्षेत्र घट्दो क्रममा क्रमबद्ध गर्नुहोस्। तलको तीर
 दायाँ मा देखा पर्नेछ।
दायाँ मा देखा पर्नेछ। - क्रम रद्द गर्नुहोस्।
शीर्ष बायाँ कुनामा बटन समूह:

| सबै चयन गर्नुहोस् | यो फ्रेममा सबै बिन्दुहरूको डाटा प्रदर्शन गर्न क्लिक गर्नुहोस्। चयन गरिएका बिन्दुहरूको मात्र डाटा प्रदर्शन गर्न फेरि क्लिक गर्नुहोस्। |
| निर्यात अंक जानकारी | हालको डेटा तालिकालाई .csv मा निर्यात गर्नुहोस् file. |
| स्तम्भ अर्डर बचत गर्नुहोस् | हालको फिल्ड अर्डर बचत गर्नुहोस्। यो सेटिङ Pandar पुन: सुरु गरेपछि प्रभावकारी रहन्छView 2. |
डाटा तालिकामा फिल्डहरू तल परिभाषित गरिएको छ:
| Ch | च्यानल # |
| AziCorr | Azimuth कोण सुधार द्वारा सही file |
| डिस्ट्रिक्ट | दूरी |
| आरएफएल | परावर्तन |
| अजी | Azimuth (रोटरको वर्तमान सन्दर्भ कोण) |
| एले | उचाइ |
| t | टाइमस्टamp |
| क्षेत्र | AT पारिवारिक उत्पादन मोडेलहरूका लागि: मिरर सतह जसमा यो मापन गरिन्छ। क्षेत्रहरू 1/2/3 क्रमशः मिरर सतहहरू 0/1/2 सँग मेल खान्छ। |
| AziState | Azimuth राज्य प्रत्येक च्यानलको फायरिङ समय अफसेट गणना गर्न प्रयोग गरिन्छ; केवल निश्चित लिडर मोडेलहरूको लागि। |
| आत्मविश्वास | आत्मविश्वास |
■ अन्य प्रदर्शन नियन्त्रणहरू 
| बटन नाम | कार्य |
| फिल्टर गर्नुहोस् | पोइन्ट क्लाउड डिस्प्लेको दायरा परिभाषित गर्नुहोस्। |
| लेजर ट्रेसिङ | यो लिडर एकाइको लेजर बीमहरू देखाउनुहोस्। |
| राज्य जानकारी | पोइन्ट क्लाउड डिस्प्ले क्षेत्रको तल-बायाँ कुनामा स्थिति जानकारी प्रदर्शन गर्नुहोस्, जस्तै मोटर स्पीड, रिटर्न मोड, र .PCAP को नाम। file. |
| PCD डम्प गर्नुहोस् | हालको फ्रेमलाई pcd (पोइन्ट क्लाउड डाटा) मा डम्प गर्नुहोस् file र निर्दिष्ट गर्नुहोस् file स्थान। |
| रंग नक्शा | पोइन्ट क्लाउड डिस्प्लेको रङ योजना सेट गर्नुहोस्। |
| बिन्दु आकार | डेटा बिन्दुहरूको प्रदर्शन आकार सेट गर्नुहोस्। |
| रिटर्न मोड | प्रदर्शन गर्न रिटर्न चयन गर्नुहोस्। |
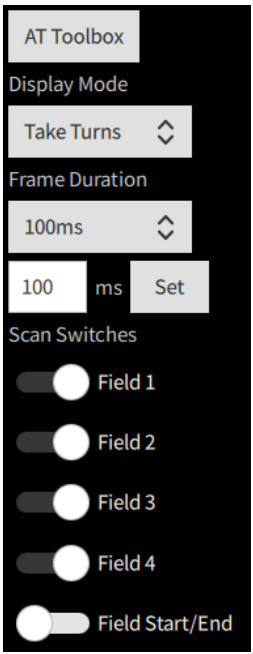
■ AT पारिवारिक उपकरण बक्स
AT परिवारसँग सम्बन्धित उत्पादन मोडेलहरूको लागि। 
| प्रदर्शन मोड | टेक टर्नहरू (पूर्वनिर्धारित): मिरर सतहहरू 0/1/2 बाट मापनहरू क्रमशः 0/1/2 फ्रेमहरूमा आउटपुट हुन्छन्। फ्रेमहरू सिलाई छैनन्। संयोजन: मिरर सतहहरू 0/1/2 बाट मापन एक फ्रेममा आउटपुट हो। त्यो हो, तीन फ्रेमहरू एक रूपमा सिलाई छन्। परम्परा: मिरर सतहहरू ०/१/२ बाट मापनहरू अनुसार एक फ्रेममा आउटपुट हुन्छ पोइन्ट क्लाउड डेटा प्याकेटहरूमा तिनीहरूको एन्कोडर कोणहरू। कुनै कोण सुधार गरिएको छैन। |
| फ्रेम अवधि | बिन्दु क्लाउड प्रदर्शनको लागि समय विन्डो प्ले-बाइ-टाइम मोड अन्तर्गत (सेक्शन 4.2 प्ले कन्ट्रोल हेर्नुहोस्), यस समय सञ्झ्याल भित्रका सबै डेटा पोइन्टहरू प्रदर्शन हुनेछन्। |
| स्क्यान स्विचहरू | प्रत्येक ऐना सतहबाट मापनहरू प्रदर्शन गर्न वा लुकाउन। क्षेत्रहरू 1/2/3 क्रमशः मिरर सतहहरू 0/1/2 सँग मेल खान्छ। फिल्ड 4 प्रयोग गरिएको छैन। |
| क्षेत्र सुरु/अन्त | अझै समर्थन गरिएको छैन |
समस्या निवारण
यदि निम्न प्रक्रियाहरूले समस्या समाधान गर्न सक्दैन भने, कृपया Hesai प्राविधिक सहयोगलाई सम्पर्क गर्नुहोस्।
| लक्षणहरू | जाँच गर्न अंकहरू |
| Lidar मोटर चलिरहेको छ, तर कुनै आउटपुट डाटा प्राप्त भएको छैन, न त Wireshark मा न Pandar माView. | प्रमाणित गर्नुहोस् कि: · इथरनेट केबल ठीकसँग जोडिएको छ (अनप्लग गरेर फेरि प्लग गरेर); Lidar को गन्तव्य IP को सेटिङ पृष्ठमा सही रूपमा सेट गरिएको छ web नियन्त्रण; तेर्सो FOV को Azimuth FOV पृष्ठमा ठीकसँग सेट गरिएको छ web नियन्त्रण; · सेन्सरको फर्मवेयर संस्करण अपग्रेड पृष्ठमा सही रूपमा देखाइएको छ web नियन्त्रण; · Lidar लेजर प्रकाश उत्सर्जन गर्दैछ। यसलाई इन्फ्रारेड क्यामेरा, इन्फ्रारेड सेन्सर कार्ड, वा इन्फ्रारेड फिल्टर बिना फोन क्यामेरा प्रयोग गरेर जाँच गर्न सकिन्छ। लक्षण रहिरहन्छ कि भनेर जाँच गर्न फेरि पावर अन गर्नुहोस्। |
| Wireshark मा डाटा प्राप्त गर्न सक्छ तर Pandar मा छैनView. | प्रमाणित गर्नुहोस् कि: Lidar गन्तव्य पोर्ट को सेटिङ पृष्ठमा सही रूपमा सेट गरिएको छ web नियन्त्रण · PC को फायरवाल असक्षम गरिएको छ, वा त्यो PandarView फायरवाल अपवादहरूमा थपिएको छ · यदि VLAN सक्षम गरिएको छ भने, PC को VLAN ID लिडरको साथ समान हुन्छ · नवीनतम PandarView संस्करण (हेसाईको आधिकारिक डाउनलोड पृष्ठ हेर्नुहोस् webसाइट वा सम्पर्क Hesai प्राविधिक सहयोग) पीसी मा स्थापित छ लक्षण रहिरहन्छ कि भनेर जाँच गर्न फेरि पावर अन गर्नुहोस्। |
परिशिष्ट I कानूनी सूचना
Hesai टेक्नोलोजी द्वारा प्रतिलिपि अधिकार 2021। सबै अधिकार सुरक्षित। Hesai को अख्तियारी बिना यो पुस्तिका को भाग वा यसको सम्पूर्णता को उपयोग वा पुनरुत्पादन निषेधित छ।
Hesai टेक्नोलोजीले यहाँका सामग्रीहरूको सन्दर्भमा कुनै प्रतिनिधित्व वा वारेन्टीहरू वा अभिव्यक्त वा निहित गर्दैन र विशेष रूपमा कुनै विशेष उद्देश्यका लागि कुनै वारेन्टी, व्यापारिकता वा फिटनेसलाई अस्वीकार गर्दछ। यसबाहेक, Hesai टेक्नोलोजीले यस प्रकाशनलाई परिमार्जन गर्ने र यसका सामग्रीहरूमा समय-समयमा परिवर्तन गर्ने अधिकार सुरक्षित राख्छ र त्यस्ता संशोधन वा परिवर्तनहरू बारे कुनै पनि व्यक्तिलाई सूचित गर्न बाध्य हुँदैन।
HESAI र HESAI लोगो हेसाई टेक्नोलोजीका दर्ता ट्रेडमार्क हुन्। अन्य सबै ट्रेडमार्कहरू, सेवा चिन्हहरू, र कम्पनीको नामहरू यस पुस्तिकामा वा Hesai को आधिकारिकमा webसाइट तिनीहरूको सम्बन्धित मालिकहरूको गुण हो।
यस उत्पादनमा समावेश सफ्टवेयरले प्रतिलिपि अधिकार समावेश गर्दछ जुन Hesai टेक्नोलोजी अन्तर्गत दर्ता गरिएको छ। कुनै पनि तेस्रो पक्षलाई अनुमति छैन, इजाजतपत्रदाताले स्पष्ट रूपमा अनुमति दिएको वा लागू कानूनद्वारा स्पष्ट रूपमा आवश्यक भएमा, डिकम्पाइल, रिभर्स इन्जिनियर, डिससेम्बल, परिमार्जन, भाडा, पट्टा, ऋण, वितरण, उपलाइसेन्स, सम्पूर्ण वा कुनै अंशमा आधारित व्युत्पन्न कार्यहरू सिर्जना गर्न। सफ्टवेयर को।
Hesai उत्पादन वारेन्टी सेवा पुस्तिका Hesai को आधिकारिक को वारेन्टी नीति पृष्ठ मा छ webसाइट: https://www.hesaitech.com/en/legal/warranty
हेसाई टेक्नोलोजी कं, लिमिटेड
फोन: +९१ ४४ ४६५६ ५५५५
Webसाइट: www.hesaitech.com
ठेगाना: भवन L2, Hongqiao विश्व केन्द्र, शंघाई, चीन
व्यापार इमेल: info@hesaitech.com
सेवा इमेल: service@hesaitech.com