![]() ແພນດາView 2
ແພນດາView 2
Point Cloud
ຊອບແວການເບິ່ງເຫັນ
ຄູ່ມືຜູ້ໃຊ້
ແພນດາView 2 Point Cloud Visualization Software
www.hesaitech.com
 HESAI Wechat
HESAI Wechat
http://weixin.qq.com/r/Fzns9IXEl9jorcGX92wF
ສະບັບເອກະສານ: PV2-en-230710
ກ່ຽວກັບຄູ່ມືນີ້
■ ການນໍາໃຊ້ຄູ່ມືນີ້
- ໃຫ້ແນ່ໃຈວ່າທ່ານອ່ານຜ່ານຄູ່ມືຜູ້ໃຊ້ນີ້ກ່ອນທີ່ຈະນໍາໃຊ້ຄັ້ງທໍາອິດຂອງທ່ານແລະປະຕິບັດຕາມຄໍາແນະນໍາໃນທີ່ນີ້ເມື່ອທ່ານດໍາເນີນການຜະລິດຕະພັນ. ການບໍ່ປະຕິບັດຕາມຄໍາແນະນໍາອາດຈະເຮັດໃຫ້ຜະລິດຕະພັນເສຍຫາຍ, ການສູນເສຍຊັບສິນ, ການບາດເຈັບສ່ວນບຸກຄົນ, ແລະ / ຫຼືການລະເມີດການຮັບປະກັນ.
- ຄູ່ມືຜູ້ໃຊ້ນີ້ບໍ່ມີຂໍ້ມູນກ່ຽວກັບການຢັ້ງຢືນຜະລິດຕະພັນ. ກະລຸນາກວດເບິ່ງເຄື່ອງໝາຍຢັ້ງຢືນຢູ່ແຜ່ນລຸ່ມຂອງຜະລິດຕະພັນ ແລະອ່ານຄຳເຕືອນການຢັ້ງຢືນທີ່ສອດຄ້ອງກັນ.
- ຖ້າທ່ານລວມເອົາຜະລິດຕະພັນ lidar ນີ້ເຂົ້າໃນຜະລິດຕະພັນຂອງທ່ານ, ທ່ານຈໍາເປັນຕ້ອງໃຫ້ຄູ່ມືຜູ້ໃຊ້ນີ້ (ຫຼືວິທີການເຂົ້າເຖິງຄູ່ມືຜູ້ໃຊ້ນີ້) ໃຫ້ກັບຜູ້ໃຊ້ທີ່ມີຈຸດປະສົງຂອງຜະລິດຕະພັນຂອງທ່ານ.
- ຜະລິດຕະພັນ lidar ນີ້ມີຈຸດປະສົງເປັນສ່ວນປະກອບຂອງຜະລິດຕະພັນສຸດທ້າຍ. ມັນຈະຖືກປະເມີນໃນຜະລິດຕະພັນສຸດທ້າຍຕາມມາດຕະຖານທີ່ກ່ຽວຂ້ອງ.
■ ການເຂົ້າເຖິງຄູ່ມືນີ້
ເພື່ອໄດ້ຮັບການສະບັບຫລ້າສຸດ:
- ເຂົ້າໄປເບິ່ງໜ້າດາວໂຫຼດຂອງເຈົ້າໜ້າທີ່ຂອງ Hesai webເວັບໄຊ: https://www.hesaitech.com/en/download
- ຫຼືຕິດຕໍ່ຕົວແທນຂາຍຂອງທ່ານໄດ້ທີ່ Hesai
- ຫຼືຕິດຕໍ່ທີມງານຊ່ວຍເຫຼືອດ້ານວິຊາການຂອງ Hesai: service@hesaitech.com
■ ສະຫນັບສະຫນູນດ້ານວິຊາການ
ຖ້າຄໍາຖາມຂອງທ່ານບໍ່ໄດ້ຢູ່ໃນຄູ່ມືຜູ້ໃຊ້ນີ້, ກະລຸນາຕິດຕໍ່ພວກເຮົາທີ່:
service@hesaitech.com
www.hesaitech.com/en/support
https://github.com/HesaiTechnology (ກະລຸນາອອກຄໍາຖາມຂອງທ່ານພາຍໃຕ້ໂຄງການ GitHub ທີ່ສອດຄ້ອງກັນ.)
■ຄວາມຫມາຍ
![]() ຄຳເຕືອນ: ຄໍາແນະນໍາທີ່ຕ້ອງປະຕິບັດຕາມເພື່ອຮັບປະກັນການນໍາໃຊ້ຜະລິດຕະພັນທີ່ປອດໄພແລະເຫມາະສົມ.
ຄຳເຕືອນ: ຄໍາແນະນໍາທີ່ຕ້ອງປະຕິບັດຕາມເພື່ອຮັບປະກັນການນໍາໃຊ້ຜະລິດຕະພັນທີ່ປອດໄພແລະເຫມາະສົມ.
![]() ໝາຍເຫດ: ຂໍ້ມູນເພີ່ມເຕີມທີ່ອາດຈະເປັນປະໂຫຍດ.
ໝາຍເຫດ: ຂໍ້ມູນເພີ່ມເຕີມທີ່ອາດຈະເປັນປະໂຫຍດ.
ແນະນຳ
ແພນດາView 2 ເປັນຊອບແວລຸ້ນທີສອງທີ່ບັນທຶກແລະສະແດງຂໍ້ມູນຈຸດຟັງຈາກ Hesai lidars, ມີຢູ່ໃນ:
- Windows 64 10-ບິດ
- Ubuntu 16.04/18.04/20.04
![]() ຖ້າຄອມພິວເຕີຂອງທ່ານໃຊ້ບັດກາຟິກ AMD ແລະແລ່ນເທິງ Ubuntu-20.04, ກະລຸນາດາວໂຫລດໄດເວີກຣາຟິກທີ່ຮອງຮັບ Ubuntu-20.04 ຈາກທາງການຂອງ AMD. webເວັບໄຊ. ສໍາລັບຄໍາແນະນໍາເພີ່ມເຕີມ, ກະລຸນາຕິດຕໍ່ຝ່າຍຊ່ວຍເຫຼືອດ້ານວິຊາການ Hesai.
ຖ້າຄອມພິວເຕີຂອງທ່ານໃຊ້ບັດກາຟິກ AMD ແລະແລ່ນເທິງ Ubuntu-20.04, ກະລຸນາດາວໂຫລດໄດເວີກຣາຟິກທີ່ຮອງຮັບ Ubuntu-20.04 ຈາກທາງການຂອງ AMD. webເວັບໄຊ. ສໍາລັບຄໍາແນະນໍາເພີ່ມເຕີມ, ກະລຸນາຕິດຕໍ່ຝ່າຍຊ່ວຍເຫຼືອດ້ານວິຊາການ Hesai.
ຄູ່ມືນີ້ອະທິບາຍ PandarView 2.0.101. ແບບຜະລິດຕະພັນສະຫນັບສະຫນູນ:
| Pandar40 Pandar40M Pandar40P Pandar64 |
Pandar128E3X | PandarQT QT128C2X |
PandarXT PandarXT-16 XT32M2X |
AT128E2X | FT120 |
ການຕິດຕັ້ງ
ດາວໂຫລດການຕິດຕັ້ງ files ຈາກເຈົ້າຫນ້າທີ່ Hesai webເວັບໄຊທ໌, ຫຼືຕິດຕໍ່ສະຫນັບສະຫນູນດ້ານວິຊາການ: www.hesaitech.com/en/download
| ລະບົບ | ການຕິດຕັ້ງ Files |
| Windows | ແພນດາView_Release_Win64_V2.x.xx.msi |
| Ubuntu | ແພນດາView_Release_Ubuntu_V2.x.xx.bin |
![]() ໃນ Ubuntu, ແລ່ນ PandarView.sh ໃນ file ເສັ້ນທາງທີ່ມີພຽງແຕ່ຕົວອັກສອນ ASCII.
ໃນ Ubuntu, ແລ່ນ PandarView.sh ໃນ file ເສັ້ນທາງທີ່ມີພຽງແຕ່ຕົວອັກສອນ ASCII.
ການໂຕ້ຕອບຂອງຊອບແວໄດ້ຖືກແບ່ງອອກເປັນສີ່ພາກສ່ວນ, ດັ່ງທີ່ສະແດງຂ້າງລຸ່ມນີ້ (ລາຍລະອຽດອາດຈະແຕກຕ່າງກັນ).
"ກ່ຽວກັບ" ໃນແຖບເມນູສະແດງໃຫ້ເຫັນສະບັບຊອບແວ.
ກວດເບິ່ງ Live Point Cloud
ເພື່ອຮັບຂໍ້ມູນໃນ PC ຂອງທ່ານ, ໃຫ້ຕັ້ງທີ່ຢູ່ IP ຂອງ PC ເປັນ 192.168.1.100 ແລະ subnet mask ເປັນ 255.255.255.0.
| ສຳ ລັບ Ubuntu: | ສໍາລັບ Windows: |
| ໃສ່ຄໍາສັ່ງ ifconfig ນີ້ໃນ terminal: ~$ sudo ifconfig enp0s20f0u2 192.168.1.100 (ແທນທີ່ enp0s20f0u2 ດ້ວຍຊື່ພອດອີເທີເນັດທ້ອງຖິ່ນ) |
ເປີດສູນການແບ່ງປັນເຄືອຂ່າຍ, ໃຫ້ຄລິກໃສ່ "Ethernet" ໃນກ່ອງ "ສະຖານະອີເທີເນັດ", ໃຫ້ຄລິກໃສ່ "ຄຸນສົມບັດ" ຄລິກສອງເທື່ອໃສ່ “Internet Protocol Version 4 (TCP/IPv4)” ຕັ້ງຄ່າທີ່ຢູ່ IP ເປັນ 192.168.1.100 ແລະ subnet mask ເປັນ 255.255.255.0 |
3.1 ການຕັ້ງຄ່າຄວາມປອດໄພທາງໄຊເບີ
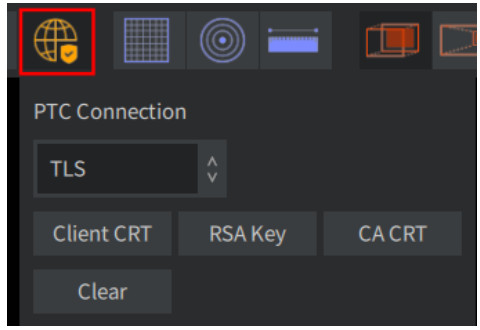
ສໍາລັບຮູບແບບຜະລິດຕະພັນທີ່ສະຫນັບສະຫນູນ Cybersecurity, ![]() (Cybersecurity) ຈະປາກົດຢູ່ໃນແຖບເຄື່ອງມື.
(Cybersecurity) ຈະປາກົດຢູ່ໃນແຖບເຄື່ອງມື.
ຜູ້ໃຊ້ສາມາດເລືອກຫນຶ່ງໃນສາມໂຫມດ:
■ ໂໝດ TLS
ໃນ TLS Mode, PandarView 2 ດຶງຂໍ້ມູນການແກ້ໄຂຂອງ lidar ໂດຍອັດຕະໂນມັດ files ໃຊ້ຄໍາສັ່ງ PTCS (PTC over TLS).
| ຫນ້າຄວາມປອດໄພຂອງ web ການຄວບຄຸມ | ເປີດສະວິດຫຼັກຄວາມປອດໄພທາງໄຊເບີ. |
| ເລືອກ TLS ສໍາລັບການເຊື່ອມຕໍ່ PTC. | |
| ແພນດາView 2 | ເລືອກ TLS ສໍາລັບການເຊື່ອມຕໍ່ PTC. |
| ໃຫ້ຄລິກໃສ່ປຸ່ມ "CA CRT" ແລະລະບຸ file ເສັ້ນທາງຂອງລະບົບຕ່ອງໂສ້ໃບຢັ້ງຢືນ CA ຂອງ Hesai (Hesai_Ca_Chain.crt). |
■ ໂໝດ mTLS
ໃນ mTLS Mode, PandarView 2 ດຶງຂໍ້ມູນການແກ້ໄຂຂອງ lidar ໂດຍອັດຕະໂນມັດ files ໃຊ້ຄໍາສັ່ງ PTCS.
| ຫນ້າຄວາມປອດໄພຂອງ web ການຄວບຄຸມ | ເປີດສະວິດຫຼັກຄວາມປອດໄພທາງໄຊເບີ. |
| ເລືອກ mTLS ສໍາລັບການເຊື່ອມຕໍ່ PTC; ອັບໂຫຼດລະບົບຕ່ອງໂສ້ໃບຢັ້ງຢືນ CA ຂອງຜູ້ໃຊ້. | |
| ແພນດາView 2 | ເລືອກ mTLS ສໍາລັບການເຊື່ອມຕໍ່ PTC. |
| ຄລິກປຸ່ມ “CA CRT”; ລະບຸ file ເສັ້ນທາງຂອງລະບົບຕ່ອງໂສ້ໃບຢັ້ງຢືນ Hesai CA (Hesai_Ca_Chain.crt). | |
| ໃຫ້ຄລິກໃສ່ປຸ່ມ "ລູກຄ້າ CRT"; ລະບຸ file ເສັ້ນທາງຂອງໃບຮັບຮອງຜູ້ໃຊ້ end-entity. | |
| ໃຫ້ຄລິກໃສ່ປຸ່ມ "RSA Key"; ລະບຸ file ເສັ້ນທາງຂອງກະແຈສ່ວນຕົວຂອງຜູ້ໃຊ້ (ກົງກັບໃບຮັບຮອງຜູ້ໃຊ້ສຸດທ້າຍ). |
![]() ປຸ່ມ "Clear" ລົບສິ່ງທີ່ລະບຸໄວ້ file ເສັ້ນທາງສໍາລັບ CA CRT, ລູກຄ້າ CRT, ແລະ RSA Key.
ປຸ່ມ "Clear" ລົບສິ່ງທີ່ລະບຸໄວ້ file ເສັ້ນທາງສໍາລັບ CA CRT, ລູກຄ້າ CRT, ແລະ RSA Key.
■ ປິດຄວາມປອດໄພທາງໄຊເບີ
ໃນຮູບແບບນີ້, PandarView 2 ດຶງຂໍ້ມູນການແກ້ໄຂຂອງ lidar ໂດຍອັດຕະໂນມັດ files ໃຊ້ຄໍາສັ່ງ PTC.
| ຫນ້າຄວາມປອດໄພຂອງ web ການຄວບຄຸມ | ປິດການໃຊ້ສະວິດຫຼັກຄວາມປອດໄພທາງໄຊເບີ |
| ແພນດາView 2 | ເລືອກທີ່ບໍ່ແມ່ນ TLS ສໍາລັບການເຊື່ອມຕໍ່ PTC |
3.2 ຮັບຂໍ້ມູນສົດ
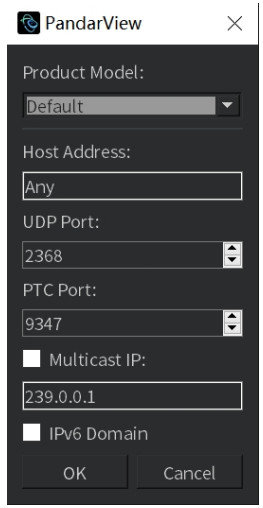
- ແຖບເຄື່ອງມື:
 (ຟັງສຸດທິ)
(ຟັງສຸດທິ) - ໃນກ່ອງໂຕ້ຕອບປັອບອັບ:
| ຮູບແບບຜະລິດຕະພັນ | ຄ່າເລີ່ມຕົ້ນ |
| ທີ່ຢູ່ເຈົ້າພາບ | ໃດ |
| ຜອດ UDP | ຄວນຈະຄືກັນກັບ “Lidar Destination Port” ໃນໜ້າການຕັ້ງຄ່າຂອງ web ການຄວບຄຸມ. 2368 ໂດຍຄ່າເລີ່ມຕົ້ນ. |
| ທ່າເຮືອ PTC | ໃຊ້ສໍາລັບການສົ່ງຄໍາສັ່ງ PTC. 9347 ໂດຍຄ່າເລີ່ມຕົ້ນ. |
| Multicast IP | ໃນໂຫມດ multicast, ກວດເບິ່ງກ່ອງກາເຄື່ອງຫມາຍແລະລະບຸກຸ່ມ multicast |
| ໂດເມນ IPv6 | ຮອງຮັບສະເພາະໃນບາງຮູບແບບຜະລິດຕະພັນເທົ່ານັ້ນ |
![]() ໃນຂະນະທີ່ໄດ້ຮັບຂໍ້ມູນສົດ:
ໃນຂະນະທີ່ໄດ້ຮັບຂໍ້ມູນສົດ:
- ຜູ້ໃຊ້ສາມາດສົ່ງອອກການແກ້ໄຂມຸມ file ແລະການແກ້ໄຂເວລາຍິງ file, ເບິ່ງພາກ 5.1 (Point Cloud Correction).
 ປຸ່ມ (ສະຕຣີມສົດ) ໃນຄອນໂຊນເຮັດໃຫ້ການຖ່າຍທອດຂໍ້ມູນສົດໄດ້ໜ້ອຍສຸດ.
ປຸ່ມ (ສະຕຣີມສົດ) ໃນຄອນໂຊນເຮັດໃຫ້ການຖ່າຍທອດຂໍ້ມູນສົດໄດ້ໜ້ອຍສຸດ.
![]()
3.3 ບັນທຶກຂໍ້ມູນສົດ
ກົດ ![]() (ບັນທຶກ) ໃນ console ແລະລະບຸ a file ໄດເລກະທໍລີ. ຄລິກ “ບັນທຶກ” ເພື່ອເລີ່ມຕົ້ນການບັນທຶກ .pcap file.
(ບັນທຶກ) ໃນ console ແລະລະບຸ a file ໄດເລກະທໍລີ. ຄລິກ “ບັນທຶກ” ເພື່ອເລີ່ມຕົ້ນການບັນທຶກ .pcap file.
![]() ເມື່ອຕັ້ງຊື່ .pcap files ໃນ Ubuntu, ປະກອບມີ fileຊື່ນາມສະກຸນ (.pcap).
ເມື່ອຕັ້ງຊື່ .pcap files ໃນ Ubuntu, ປະກອບມີ fileຊື່ນາມສະກຸນ (.pcap).
ຫຼິ້ນ Back Point Cloud
4.1 ເປີດ .PCAP File
- ກົດ
 (ເປີດ File) ໃນແຖບເຄື່ອງມື ແລະເລືອກ .pcap file ຢູ່ໃນປ່ອງຢ້ຽມປ໊ອບອັບ.
(ເປີດ File) ໃນແຖບເຄື່ອງມື ແລະເລືອກ .pcap file ຢູ່ໃນປ່ອງຢ້ຽມປ໊ອບອັບ.
ອີກທາງເລືອກໜຶ່ງ, ລາກ .pcap file ເຂົ້າໄປໃນ PandarView 2. - ເມື່ອການໂຫຼດສຳເລັດແລ້ວ, ຈຸດຕິດຕາມຄລາວຈະປາກົດຢູ່ໃນຄອນໂຊ.

![]() ບັນທຶກ
ບັນທຶກ
- ຮອງຮັບຮູບແບບ tcpdump pcap ເທົ່ານັ້ນ.
- ຮອງຮັບການຕິດຕາມຄລາວພຽງຈຸດດຽວຕໍ່ຄັ້ງ: ເມື່ອໄດ້ຮັບຂໍ້ມູນສົດ ຫຼືເປີດ .pcap ໃໝ່ file, ການຕິດຕາມທີ່ຜ່ານມາຈະຖືກລຶບອັດຕະໂນມັດ.
- ຂະຫນາດໃຫຍ່ .pcap files ອາດຈະໃຊ້ເວລາໃນຂະນະທີ່ໂຫຼດ. ໃນຂະນະທີ່ກໍາລັງໂຫລດ, ຄລິກ (ຖ່າຍທອດສົດ) ເພື່ອຫຼິ້ນຂໍ້ມູນຄລາວຈຸດພ້ອມກັນ.
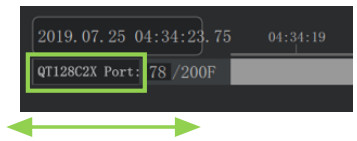
- ຖ້າຮູບແບບຜະລິດຕະພັນ lidar ແລະເລກພອດບໍ່ສະແດງເຕັມ, ເລື່ອນລໍ້ຫນູ.
4.2 ການຄວບຄຸມການຫຼິ້ນ 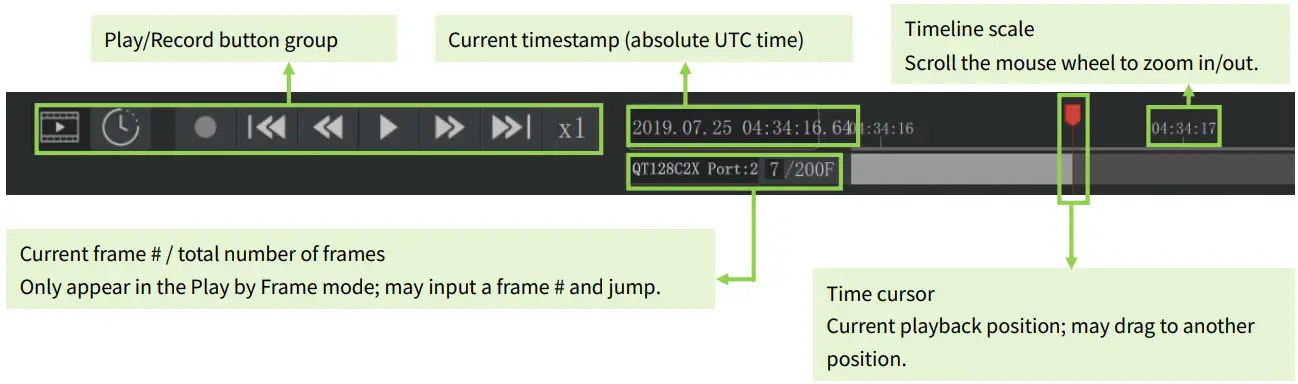
| ປຸ່ມ | ລາຍລະອຽດ |
 |
ຊ້າຍ: ຫຼິ້ນຕາມກອບ (ຄ່າເລີ່ມຕົ້ນ) ຂວາ: ຫຼິ້ນຕາມເວລາ |
 |
ໄປຫາຈຸດເລີ່ມຕົ້ນ ຫຼືຈຸດສິ້ນສຸດຂອງ file |
 |
ຊ້າຍ: ປັບຄວາມໄວການສົ່ງຕໍ່ (1x, 1/2x, 1/4x, 1/8x, …, 1/64x) ຂວາ: ປັບຄວາມໄວການສົ່ງຕໍ່ (1x, 2x, 4x, 8x, …, 64x) |
 |
ຊ້າຍ: ຫຼັງຈາກໂຫຼດ a file, ຄລິກເພື່ອຫຼິ້ນ. ສິດ: ໃນຂະນະທີ່ຫຼີ້ນ a file, ຄລິກເພື່ອຢຸດຊົ່ວຄາວ. |
 |
ສະແດງຄວາມໄວໃນປະຈຸບັນ |
| ໃນຂະນະທີ່ກໍາລັງໂຫລດ a file, ຄລິກເພື່ອຫຼິ້ນໃນເວລາດຽວກັນ. (ປຸ່ມນີ້ຈະຫາຍໄປເມື່ອການໂຫຼດສຳເລັດ.) ເມື່ອໄດ້ຮັບຂໍ້ມູນສົດ, ໃຫ້ຄລິກເພື່ອສະຕຣີມດ້ວຍເວລາຕອບສະໜອງຕໍ່າສຸດ. |
ການແກ້ໄຂແລະການຕັ້ງຄ່າ
ເມື່ອກວດເບິ່ງເມຄຈຸດສົດ ຫຼືຫຼິ້ນຄືນຈຸດເມຄທີ່ບັນທຶກໄວ້, ການແກ້ໄຂ files ແລະການຕັ້ງຄ່າ files ອາດຈະຖືກນໍາໃຊ້.
5.1 ຈຸດ Cloud Correction
| ການແກ້ໄຂມຸມ | ແກ້ໄຂຂໍ້ມູນ azimuth ແລະລະດັບຄວາມສູງ. ເບິ່ງພາກ 1.3 (ການແຈກຢາຍຊ່ອງ) ໃນຄູ່ມືຜູ້ໃຊ້ lidar. |
| ການແກ້ໄຂເວລາໄຟ | ສໍາລັບຮູບແບບຜະລິດຕະພັນສະເພາະໃດຫນຶ່ງ: ແກ້ azimuth ຂອງຂໍ້ມູນຟັງຈຸດໂດຍອີງຕາມການທີ່ໃຊ້ເວລາການຍິງຂອງແຕ່ລະຊ່ອງ. |
| ການແກ້ໄຂໄລຍະຫ່າງ | ສໍາລັບບາງຮູບແບບຜະລິດຕະພັນ: ແກ້ໄຂຂໍ້ມູນໄລຍະຫ່າງ. |
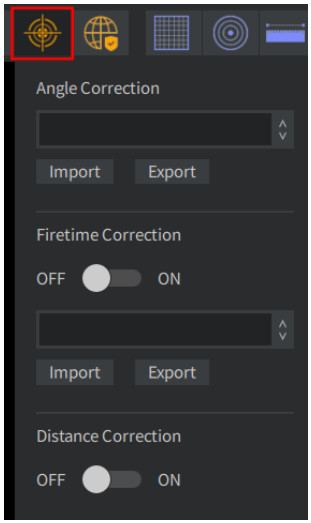
ກົດ ![]() (ການແກ້ໄຂ) ໃນແຖບເຄື່ອງມື:
(ການແກ້ໄຂ) ໃນແຖບເຄື່ອງມື:
| ປະເພດຂອງການແກ້ໄຂ | ລາຍລະອຽດ |
| ການແກ້ໄຂມຸມ | ເມື່ອກວດເບິ່ງເມຄຈຸດສົດ: • PandarView 2 ດຶງເອົາການແກ້ໄຂອັດຕະໂນມັດ file ຂອງຫນ່ວຍບໍລິການ lidar ນີ້. ເມື່ອຫຼິ້ນຄືນຈຸດເມຄທີ່ບັນທຶກໄວ້: • PandarView 2 ອັດຕະໂນມັດອັບໂຫລດການແກ້ໄຂທົ່ວໄປ file ສໍາລັບຮູບແບບຜະລິດຕະພັນນີ້. •ສໍາລັບການສະແດງທີ່ດີທີ່ສຸດ, ໃຫ້ຄລິກໃສ່ "ນໍາເຂົ້າ" ແລະເລືອກການແກ້ໄຂ file ຂອງຫນ່ວຍບໍລິການ lidar ນີ້. |
| ການແກ້ໄຂເວລາໄຟ | QT128C2X: • ເມື່ອກວດເບິ່ງເມຄຈຸດສົດ: PandarView 2 ດຶງເອົາການແກ້ໄຂອັດຕະໂນມັດ file ຂອງຫນ່ວຍບໍລິການ lidar ນີ້; ສະຫຼັບໄປ ON ແລະເລີ່ມການແກ້ໄຂ. • ເມື່ອຫຼິ້ນຄືນເມກຈຸດທີ່ບັນທຶກໄວ້: PandarView 2 ອັບໂຫລດການແກ້ໄຂທົ່ວໄປໂດຍອັດຕະໂນມັດ file ສໍາລັບຮູບແບບຜະລິດຕະພັນນີ້; ສະຫຼັບໄປ ON ແລະເລີ່ມການແກ້ໄຂ. ແບບຜະລິດຕະພັນອື່ນໆ: • ສະຫຼັບໄປເປີດ, ຄລິກ “ນຳເຂົ້າ” ແລະເລືອກການແກ້ໄຂ file ຂອງຫນ່ວຍບໍລິການ lidar ນີ້. •ຖ້າຫາກວ່າການແກ້ໄຂຂອງຫນ່ວຍ lidar file ບໍ່ມີຢູ່ໃນທ້ອງຖິ່ນ, ປ່ຽນເປັນ ON ແລະເລືອກການແກ້ໄຂທົ່ວໄປ file ສໍາລັບຮູບແບບຜະລິດຕະພັນນີ້ຢູ່ໃນເມນູເລື່ອນລົງ. |
| ການແກ້ໄຂໄລຍະຫ່າງ | ສະຫຼັບໄປເປີດ. |
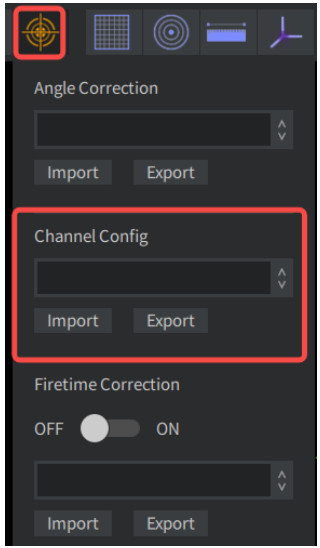
5.2 ການຕັ້ງຄ່າຊ່ອງ
ການຕັ້ງຄ່າຊ່ອງ file ເລືອກຊຸດຍ່ອຍຈາກທຸກຊ່ອງທາງທີ່ມີຢູ່ຂອງ lidar, ກໍານົດຈໍານວນບລັອກໃນ Point Cloud Data Packet, ແລະກໍານົດຊ່ອງທາງທີ່ຈະເກັບໄວ້ໃນແຕ່ລະບລັອກ.
ມີພຽງແຕ່ສໍາລັບ QT128C2X:
- ເມື່ອກວດເບິ່ງເມຄຈຸດສົດ: PandarView 2 ດຶງຂໍ້ມູນການຕັ້ງຄ່າຊ່ອງໂດຍອັດຕະໂນມັດ file ຂອງຫນ່ວຍບໍລິການ lidar ນີ້.
- ເມື່ອຫຼິ້ນຄືນຈຸດເມຄທີ່ບັນທຶກໄວ້: ຄລິກ
 (ການແກ້ໄຂ) ໃນແຖບເຄື່ອງມື, ໃຫ້ຄລິກໃສ່ "ການນໍາເຂົ້າ" ໃນພາກສ່ວນການຕັ້ງຄ່າຊ່ອງ, ແລະເລືອກເອົາການຕັ້ງຄ່າຊ່ອງ. file ຂອງຫນ່ວຍບໍລິການ lidar ນີ້.
(ການແກ້ໄຂ) ໃນແຖບເຄື່ອງມື, ໃຫ້ຄລິກໃສ່ "ການນໍາເຂົ້າ" ໃນພາກສ່ວນການຕັ້ງຄ່າຊ່ອງ, ແລະເລືອກເອົາການຕັ້ງຄ່າຊ່ອງ. file ຂອງຫນ່ວຍບໍລິການ lidar ນີ້.
5.3 File ນໍາເຂົ້າແລະສົ່ງອອກ
File ນໍາເຂົ້າ
- ເມື່ອກວດເບິ່ງເມຄຈຸດສົດ, ປຸ່ມ "ສົ່ງອອກ" ສາມາດໃຊ້ເພື່ອດາວໂຫລດການແກ້ໄຂຫຼືການຕັ້ງຄ່າ files ຂອງຫນ່ວຍບໍລິການ lidar ນີ້.
- ເມື່ອຕັ້ງຊື່ເຫຼົ່ານີ້ files ໃນ Ubuntu, ໃຫ້ແນ່ໃຈວ່າຈະປະກອບມີ fileການຂະຫຍາຍຊື່ (.dat ສໍາລັບການແກ້ໄຂມຸມ files ຂອງຄອບຄົວ AT, ແລະ .csv ສໍາລັບຄົນອື່ນ).
File ສົ່ງອອກ
- ການແກ້ໄຂຫຼືການຕັ້ງຄ່າທີ່ນໍາເຂົ້າ files ຖືກເພີ່ມໃສ່ລຸ່ມສຸດຂອງເມນູເລື່ອນລົງ.
- ຖ້າເຈົ້າບໍ່ຕ້ອງການສິ່ງເຫຼົ່ານັ້ນອີກຕໍ່ໄປ files, ທ່ານອາດຈະລຶບພວກມັນອອກຈາກເສັ້ນທາງຕໍ່ໄປນີ້ (ມີຜົນຫຼັງຈາກປິດເປີດ Pandar ຄືນໃໝ່View 2): ເອກະສານ\PandaViewຂໍ້ມູນFiles\csv
ຄຸນສົມບັດອື່ນໆ
6.1 ທາງລັດຂອງຫນູ
| ລາກປຸ່ມຊ້າຍ | ໝຸນຈຸດເມກ |
| ລາກປຸ່ມຂວາ | ຊູມເຂົ້າ/ອອກ: ລາກຊ້າຍເພື່ອຊູມອອກ, ແລະຂວາສໍາລັບການຊູມເຂົ້າ |
| ເລື່ອນລໍ້ | ຊູມເຂົ້າ/ອອກ: ເລື່ອນລົງເພື່ອຊູມອອກ ແລະຂຶ້ນເພື່ອຊູມເຂົ້າ |
| ກົດລໍ້ແລະລາກ | ແຊ່ໄດ້ view |
| Shift & Drag ປຸ່ມຊ້າຍ | Spin ຈຸດ cloud ອ້ອມ ຂ້າງ ໄດ້ viewທິດທາງ (ທິດທາງຈາກ viewຊີ້ໃຫ້ເຫັນຕົ້ນກໍາເນີດຂອງພິກັດ) |
| Shift & Drag ປຸ່ມຂວາ | ແຊ່ໄດ້ view |
6.2 ຈຸດ Cloud Tracks
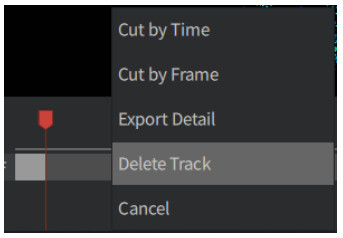
ຄລິກຂວາໃສ່ຈຸດຕິດຕາມຄລາວ:
| ຕັດຕາມເວລາ | ລະບຸເວລາເລີ່ມຕົ້ນ/ສິ້ນສຸດamps, ຕັດເພງປະຈຸບັນ, ແລະບັນທຶກເປັນ .pcap ໃຫມ່ file. |
| ຕັດໂດຍກອບ | ລະບຸເຟຣມເລີ່ມຕົ້ນ/ສິ້ນສຸດ, ຕັດແຖບປະຈຸບັນ, ແລະບັນທຶກໃສ່ .pcap ໃໝ່ file. |
| ລາຍລະອຽດການສົ່ງອອກ | ຫຼັງຈາກການເລືອກພື້ນທີ່ຂອງຈຸດ (ເບິ່ງພາກທີ 6.3 ແຖບເຄື່ອງມື – ການຄັດເລືອກຈຸດແລະຕາຕະລາງຂໍ້ມູນ), ໃຫ້ລະບຸເຟຣມເລີ່ມຕົ້ນ / ສິ້ນສຸດແລະສົ່ງອອກຂໍ້ມູນ cloud ຈຸດທີ່ສອດຄ້ອງກັນກັບ .csv files. · ການນໍາໃຊ້ · ເມື່ອຕັ້ງຊື່ເຫຼົ່ານີ້ files ໃນ Ubuntu, ໃຫ້ແນ່ໃຈວ່າຈະປະກອບມີ fileນາມສະກຸນ (.csv). |
| ລຶບຕິດຕາມ | ລຶບເພງປະຈຸບັນ. |
| ຍົກເລີກ | ປິດເມນູຄລິກຂວາ. |
6.3 ແຖບເຄື່ອງມື
ຖ້າ PandarView 2 ປ່ອງຢ້ຽມແຄບເກີນໄປທີ່ຈະສະແດງແຖບເຄື່ອງມືແບບເຕັມ, ເລື່ອນລໍ້ຫນູໄປຫາ view ປຸ່ມທັງຫມົດ.
■ປະສານງານຕາຂ່າຍໄຟຟ້າ, ລະບົບປະສານງານ, ແລະການວັດແທກໄລຍະຫ່າງ 
| ຊື່ປຸ່ມ | ຟັງຊັນ |
| ຄາເຕຊຽນ | ສະແດງ/ເຊື່ອງຕາຂ່າຍທີ່ມີໄລຍະຫ່າງ 30 ແມັດ |
| ຂົ້ວໂລກ | ສະແດງ/ເຊື່ອງວົງມົນທີ່ມີໄລຍະຫ່າງ 10 ແມັດ |
| ໄມ້ບັນທັດ | ລາກປຸ່ມຊ້າຍເພື່ອວັດແທກໄລຍະຫ່າງລະຫວ່າງສອງຈຸດ |
| ປະສານງານ | ສະແດງລະບົບປະສານງານສີ່ຫລ່ຽມ |
■ ຮູບແບບການສາຍ

| ຊື່ປຸ່ມ | ຟັງຊັນ |
| ການຄາດຄະເນຮູບຊົງ | – |
| ການຄາດຄະເນທັດສະນະ | – |
■ ຈຸດຂອງ View ແລະ Spinning
| ຊື່ປຸ່ມ | ຟັງຊັນ |
| ໜ້າ/ຫຼັງ/ຊ້າຍ/ຂວາ/ເທິງ | – |
| ໝຸນ | ໝຸນ viewທິດທາງ (ທິດທາງຈາກ viewຊີ້ໃຫ້ເຫັນຕົ້ນກໍາເນີດຂອງພິກັດ) ອ້ອມຮອບແກນ Z |
■ ການເລືອກຊ່ອງ 
ກົດ ![]() (ຊ່ອງ) ກັບ view ຫຼືປ່ຽນຊ່ອງທີ່ສະແດງໃນປັດຈຸບັນ.
(ຊ່ອງ) ກັບ view ຫຼືປ່ຽນຊ່ອງທີ່ສະແດງໃນປັດຈຸບັນ.
ສະແດງ ຫຼືເຊື່ອງຊ່ອງ
- ກວດເບິ່ງ/ຍົກເລີກການໝາຍເອົາກ່ອງຢູ່ເບື້ອງຊ້າຍຂອງແຕ່ລະຊ່ອງເພື່ອສະແດງ/ເຊື່ອງຂໍ້ມູນຄລາວຈຸດຂອງມັນ.
- ຕາມຄ່າເລີ່ມຕົ້ນ, ຊ່ອງທັງໝົດຈະຖືກສະແດງ.
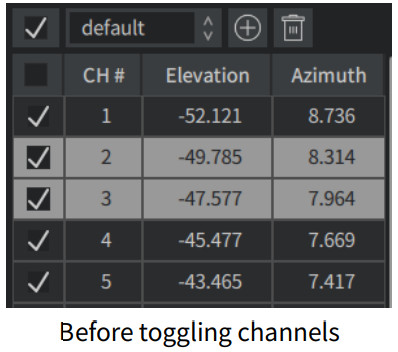
ເລືອກ ແລະສະຫຼັບຊ່ອງ
- ຄລິກທີ່ຊ່ອງໃດໜຶ່ງ (ບໍ່ລວມເອົາພື້ນທີ່ຂອງກ່ອງກາໝາຍຂອງມັນ) ເພື່ອເລືອກ ແລະເນັ້ນໃສ່ຊ່ອງນີ້.
- ກົດ Shift ຄ້າງໄວ້ໃນຂະນະທີ່ຄລິກເພື່ອເລືອກຫຼາຍຊ່ອງໃກ້ຄຽງ.
- ກົດ Ctrl ຄ້າງໄວ້ໃນຂະນະທີ່ຄລິກເພື່ອເລືອກຫຼາຍຊ່ອງແຍກຕ່າງຫາກ.
- ກົດ
 (ສະຫຼັບຊ່ອງທີ່ເລືອກ) ໃນມຸມຊ້າຍເທິງເພື່ອສະຫຼັບຊ່ອງທີ່ເລືອກລະຫວ່າງເລືອກ ແລະບໍ່ໄດ້ເລືອກ.
(ສະຫຼັບຊ່ອງທີ່ເລືອກ) ໃນມຸມຊ້າຍເທິງເພື່ອສະຫຼັບຊ່ອງທີ່ເລືອກລະຫວ່າງເລືອກ ແລະບໍ່ໄດ້ເລືອກ.
ບັນທຶກກຸ່ມຊ່ອງ
- ກົດ
 ເພື່ອບັນທຶກຊ່ອງທີ່ເລືອກໄວ້ເປັນການຕັ້ງຄ່າ ແລະຕັ້ງຊື່ມັນ.
ເພື່ອບັນທຶກຊ່ອງທີ່ເລືອກໄວ້ເປັນການຕັ້ງຄ່າ ແລະຕັ້ງຊື່ມັນ. - ການຕັ້ງຄ່າທີ່ບັນທຶກໄວ້ໃນເມື່ອກ່ອນມີຢູ່ຫຼັງຈາກການຣີສະຕາດ PandarView 2 ແລະສາມາດໄດ້ຮັບການຄັດເລືອກໃນ
 ເມນູເລື່ອນລົງ.
ເມນູເລື່ອນລົງ. - ເພື່ອລຶບການຕັ້ງຄ່າທີ່ເລືອກໃນປັດຈຸບັນ, ຄລິກ
 .
.
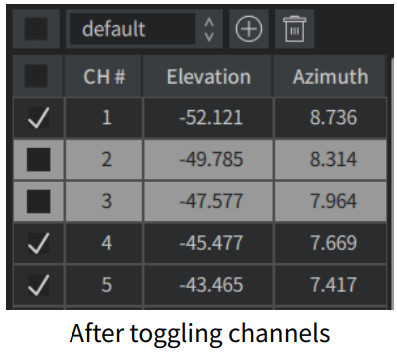
■ ການເລືອກຈຸດ ແລະຕາຕະລາງຂໍ້ມູນ
ກົດ ![]() (ເລືອກ) ແລະລາກເມົ້າເພື່ອເນັ້ນໃສ່ຈຸດໃດໜຶ່ງ.
(ເລືອກ) ແລະລາກເມົ້າເພື່ອເນັ້ນໃສ່ຈຸດໃດໜຶ່ງ.
ກົດ ![]() (ແຜ່ນແພ) ເຖິງ view ຂໍ້ມູນຂອງຈຸດທີ່ເນັ້ນໃສ່, ດັ່ງທີ່ສະແດງໃຫ້ເຫັນຂ້າງລຸ່ມນີ້.
(ແຜ່ນແພ) ເຖິງ view ຂໍ້ມູນຂອງຈຸດທີ່ເນັ້ນໃສ່, ດັ່ງທີ່ສະແດງໃຫ້ເຫັນຂ້າງລຸ່ມນີ້. 
ເມື່ອຄລິກສອງເທື່ອໃສ່ຫົວຂໍ້ມູນຫຼາຍຄັ້ງ, ຄຳສັ່ງຕໍ່ໄປນີ້ຈະຖືກດຳເນີນການເທື່ອລະອັນ:
- ປັບຄວາມກວ້າງຂອງຖັນໃສ່ຊື່ຊ່ອງຂໍ້ມູນ
(ອີກທາງເລືອກ, ວາງຕົວກະພິບເມົ້າລະຫວ່າງສອງຫົວເພື່ອໃຫ້ເຄີເຊີກາຍເປັນລູກສອນຊ້າຍ-ຂວາ; ລາກເມົ້າເພື່ອປັບຄວາມກວ້າງຂອງຖັນ.) - ຈັດຮຽງຊ່ອງຂໍ້ມູນນີ້ຈາກນ້ອຍຫາໃຫຍ່. ລູກສອນຂຶ້ນ
 ຈະປາກົດຢູ່ເບື້ອງຂວາ.
ຈະປາກົດຢູ່ເບື້ອງຂວາ. - ຮຽງລຳດັບຊ່ອງຂໍ້ມູນນີ້ຈາກໃຫຍ່ຫານ້ອຍ. ລູກສອນລົງ
 ຈະປາກົດຢູ່ເບື້ອງຂວາ.
ຈະປາກົດຢູ່ເບື້ອງຂວາ. - ຍົກເລີກການຈັດລຽງ.
ກຸ່ມປຸ່ມຢູ່ແຈເທິງຊ້າຍ:

| ເລືອກທັງໝົດ | ຄລິກເພື່ອສະແດງຂໍ້ມູນຂອງຈຸດທັງໝົດໃນກອບນີ້. ຄລິກອີກຄັ້ງເພື່ອສະແດງຂໍ້ມູນຂອງຈຸດທີ່ເລືອກເທົ່ານັ້ນ. |
| ຂໍ້ມູນຈຸດສົ່ງອອກ | ສົ່ງອອກຕາຕະລາງຂໍ້ມູນປັດຈຸບັນເປັນ .csv file. |
| ບັນທຶກຄໍາສັ່ງຖັນ | ບັນທຶກຄໍາສັ່ງພາກສະຫນາມໃນປະຈຸບັນ. ການຕັ້ງຄ່ານີ້ຍັງຄົງມີຜົນຫຼັງຈາກປິດເປີດ Pandar ຄືນໃໝ່View 2. |
ຊ່ອງຂໍ້ມູນໃນຕາຕະລາງຂໍ້ມູນແມ່ນຖືກກໍານົດໄວ້ຂ້າງລຸ່ມນີ້:
| Ch | ຊ່ອງ # |
| AziCorr | Azimuth ແກ້ໄຂໂດຍການແກ້ໄຂມຸມ file |
| ໄລຍະທາງ | ໄລຍະທາງ |
| Rfl | ການສະທ້ອນ |
| ອາຊີ | Azimuth (ມຸມອ້າງອີງປັດຈຸບັນຂອງ rotor) |
| ເອເລ | ຄວາມສູງ |
| t | ເວລາamp |
| ພາກສະຫນາມ | ສໍາລັບຮູບແບບຜະລິດຕະພັນຄອບຄົວ AT: ພື້ນຜິວກະຈົກທີ່ມີການວັດແທກນີ້. Fields 1/2/3 ກົງກັບ Mirror Surfaces 0/1/2, ຕາມລໍາດັບ. |
| AziState | ລັດ Azimuth ໃຊ້ສໍາລັບການຄິດໄລ່ການຊົດເຊີຍເວລາຍິງຂອງແຕ່ລະຊ່ອງ; ພຽງແຕ່ສໍາລັບບາງຕົວແບບ lidar. |
| ຄວາມຫມັ້ນໃຈ | ຄວາມຫມັ້ນໃຈ |
■ ການຄວບຄຸມການສະແດງຜົນອື່ນໆ 
| ຊື່ປຸ່ມ | ຟັງຊັນ |
| ການກັ່ນຕອງ | ກໍານົດຂອບເຂດຂອງການສະແດງເມຄຈຸດ. |
| ການຕິດຕາມເລເຊີ | ສະແດງໃຫ້ເຫັນ beams laser ຂອງຫນ່ວຍບໍລິການ lidar ນີ້. |
| ຂໍ້ມູນຂອງລັດ | ສະແດງຂໍ້ມູນສະຖານະພາບຢູ່ແຈລຸ່ມຊ້າຍຂອງພື້ນທີ່ການສະແດງຟັງຈຸດເຊັ່ນ: ຄວາມໄວມໍເຕີ, ຮູບແບບການກັບຄືນໄປບ່ອນ, ແລະຊື່ຂອງ .PCAP file. |
| ຖິ້ມ PCD | ຖິ້ມເຟຣມປັດຈຸບັນເຂົ້າໄປໃນ .pcd (Point Cloud Data) file ແລະລະບຸ file ສະຖານທີ່. |
| ແຜນທີ່ສີ | ກໍານົດຮູບແບບສີຂອງຈຸດສະແດງເມຄ. |
| ຂະໜາດຈຸດ | ກໍານົດຂະຫນາດການສະແດງຂອງຈຸດຂໍ້ມູນ. |
| ໂໝດກັບຄືນ | ເລືອກຜົນຕອບແທນທີ່ຈະສະແດງ. |
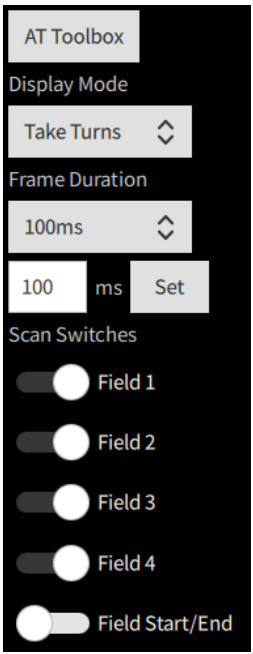
■ AT Family Toolbox
ສໍາລັບຮູບແບບຜະລິດຕະພັນທີ່ເປັນຂອງຄອບຄົວ AT. 
| ໂໝດສະແດງຜົນ | Take Turns (ຄ່າເລີ່ມຕົ້ນ): ການວັດແທກຈາກ Mirror Surfaces 0/1/2 ແມ່ນຜົນອອກມາເປັນ Frames 0/1/2, ຕາມລໍາດັບ. ກອບບໍ່ໄດ້ stitched. ການປະສົມປະສານ: ການວັດແທກຈາກ Mirror Surfaces 0/1/2 ແມ່ນຜົນຜະລິດໄປຫາຫນຶ່ງກອບ. ນັ້ນແມ່ນ, ສາມກອບແມ່ນ stitched ເປັນຫນຶ່ງ. ປະເພນີ: ການວັດແທກຈາກ Mirror Surfaces 0/1/2 ແມ່ນຜົນຜະລິດເປັນຫນຶ່ງກອບອີງຕາມການ ມຸມຕົວເຂົ້າລະຫັດຂອງພວກເຂົາໃນ Point Cloud Data Packets. ບໍ່ມີການແກ້ໄຂມຸມຖືກປະຕິບັດ. |
| ໄລຍະເວລາກອບ | ປ່ອງຢ້ຽມເວລາສໍາລັບການສະແດງເມຄຈຸດ ພາຍໃຕ້ໂໝດຫຼິ້ນຕາມເວລາ (ເບິ່ງພາກ 4.2 Play Control), ຈຸດຂໍ້ມູນທັງໝົດພາຍໃນໜ້າຕ່າງເວລານີ້ຈະຖືກສະແດງ. |
| ສະແກນສະວິດ | ເພື່ອສະແດງຫຼືຊ່ອນການວັດແທກຈາກແຕ່ລະດ້ານຂອງກະຈົກ. Fields 1/2/3 ກົງກັບ Mirror Surfaces 0/1/2, ຕາມລໍາດັບ. ພາກສະຫນາມ 4 ບໍ່ໄດ້ຖືກນໍາໃຊ້. |
| ພາກສະຫນາມເລີ່ມຕົ້ນ / ສິ້ນສຸດ | ຍັງບໍ່ຮອງຮັບເທື່ອ |
ການແກ້ໄຂບັນຫາ
ໃນກໍລະນີຂະບວນການດັ່ງຕໍ່ໄປນີ້ບໍ່ສາມາດແກ້ໄຂບັນຫາໄດ້, ກະລຸນາຕິດຕໍ່ຫາສະຫນັບສະຫນູນດ້ານວິຊາການ Hesai.
| ອາການ | ຈຸດທີ່ຈະກວດສອບ |
| ມໍເຕີ Lidar ເຮັດວຽກຢູ່, ແຕ່ບໍ່ມີຂໍ້ມູນຜົນຜະລິດໄດ້ຮັບ, ທັງຢູ່ໃນ Wireshark ຫຼື PandarView. | ກວດສອບວ່າ: · ສາຍອີເທີເນັດຖືກເຊື່ອມຕໍ່ຢ່າງຖືກຕ້ອງ (ໂດຍການຖອດປລັກແລະສຽບອີກເທື່ອຫນຶ່ງ); · IP ຈຸດຫມາຍປາຍທາງຂອງ Lidar ຖືກກໍານົດຢ່າງຖືກຕ້ອງຢູ່ໃນຫນ້າການຕັ້ງຄ່າຂອງ web ການຄວບຄຸມ; · FOV ອອກຕາມແນວນອນຖືກຕັ້ງຢ່າງຖືກຕ້ອງຢູ່ໃນຫນ້າ Azimuth FOV ຂອງ web ການຄວບຄຸມ; · ເວີຊັ່ນເຟີມແວຂອງເຊັນເຊີຖືກສະແດງຢ່າງຖືກຕ້ອງຢູ່ໃນໜ້າການຍົກລະດັບຂອງ web ການຄວບຄຸມ; · Lidar ກໍາລັງປ່ອຍແສງເລເຊີ. ນີ້ສາມາດກວດສອບໄດ້ໂດຍການໃຊ້ກ້ອງຖ່າຍຮູບອິນຟາເຣດ, ບັດເຊັນເຊີອິນຟາເຣດ, ຫຼືກ້ອງຖ່າຍຮູບໂທລະສັບທີ່ບໍ່ມີຕົວກອງອິນຟາເຣດ. ເປີດເຄື່ອງອີກຄັ້ງເພື່ອກວດເບິ່ງວ່າອາການຍັງຄົງຢູ່. |
| ສາມາດຮັບຂໍ້ມູນໃນ Wireshark ແຕ່ບໍ່ແມ່ນຢູ່ໃນ PandarView. | ກວດສອບວ່າ: · Lidar ຈຸດຫມາຍປາຍທາງ Port ຖືກກໍານົດຢ່າງຖືກຕ້ອງຢູ່ໃນຫນ້າການຕັ້ງຄ່າຂອງ web ການຄວບຄຸມ · Firewall ຂອງ PC ຖືກປິດໃຊ້ງານ, ຫຼືວ່າ PandarView ຖືກເພີ່ມໃສ່ຂໍ້ຍົກເວັ້ນຂອງ Firewall · ຖ້າ VLAN ຖືກເປີດໃຊ້, VLAN ID ຂອງ PC ແມ່ນຄືກັນກັບ lidar's · Pandar ຫລ້າສຸດView ສະບັບ (ເບິ່ງຫນ້າດາວໂຫລດຢ່າງເປັນທາງການຂອງ Hesai website ຫຼືຕິດຕໍ່ສະຫນັບສະຫນູນດ້ານວິຊາການ Hesai) ໄດ້ຖືກຕິດຕັ້ງຢູ່ໃນ PC ເປີດເຄື່ອງອີກຄັ້ງເພື່ອກວດເບິ່ງວ່າອາການຍັງຄົງຢູ່. |
ເອກະສານຊ້ອນທ້າຍ I ປະກາດກົດໝາຍ
ສະຫງວນລິຂະສິດ 2021 ໂດຍ Hesai Technology. ສະຫງວນລິຂະສິດທັງໝົດ. ການນໍາໃຊ້ຫຼືການແຜ່ພັນຂອງຄູ່ມືນີ້ໃນພາກສ່ວນຫຼືທັງຫມົດຂອງຕົນໂດຍບໍ່ມີການອະນຸຍາດຂອງ Hesai ແມ່ນຫ້າມ.
ເທກໂນໂລຍີ Hesai ບໍ່ມີການເປັນຕົວແທນຫຼືການຮັບປະກັນ, ບໍ່ວ່າຈະສະແດງອອກຫຼືໂດຍຄວາມຫມາຍ, ກ່ຽວກັບເນື້ອໃນທີ່ນີ້ແລະໂດຍສະເພາະປະຕິເສດການຮັບປະກັນ, ການຄ້າ, ຫຼືຄວາມສອດຄ່ອງສໍາລັບຈຸດປະສົງສະເພາະໃດຫນຶ່ງ. ນອກຈາກນັ້ນ, Hesai Technology ສະຫງວນສິດໃນການປັບປຸງສິ່ງພິມນີ້ ແລະປ່ຽນແປງເປັນແຕ່ລະຄັ້ງໃນເນື້ອໃນຂອງເລື່ອງນີ້ ໂດຍບໍ່ມີພັນທະທີ່ຈະແຈ້ງໃຫ້ບຸກຄົນໃດໆກ່ຽວກັບການແກ້ໄຂ ຫຼືການປ່ຽນແປງດັ່ງກ່າວ.
ໂລໂກ້ HESAI ແລະ HESAI ແມ່ນເຄື່ອງໝາຍການຄ້າທີ່ຈົດທະບຽນຂອງ Hesai Technology. ເຄື່ອງໝາຍການຄ້າອື່ນໆທັງໝົດ, ເຄື່ອງໝາຍການບໍລິການ, ແລະຊື່ບໍລິສັດຢູ່ໃນຄູ່ມືນີ້ ຫຼືຢູ່ໃນທາງການຂອງ Hesai webເວັບໄຊແມ່ນຊັບສິນຂອງເຈົ້າຂອງຂອງເຂົາເຈົ້າ.
ຊອບແວທີ່ລວມຢູ່ໃນຜະລິດຕະພັນນີ້ມີລິຂະສິດທີ່ລົງທະບຽນພາຍໃຕ້ເຕັກໂນໂລຢີ Hesai. ບຸກຄົນທີສາມແມ່ນບໍ່ໄດ້ຮັບອະນຸຍາດ, ຍົກເວັ້ນການອະນຸຍາດຢ່າງຊັດເຈນໂດຍຜູ້ອອກໃບອະນຸຍາດຫຼືກໍານົດຢ່າງຈະແຈ້ງໂດຍກົດຫມາຍທີ່ກ່ຽວຂ້ອງ, ເພື່ອ decompile, reverse engineer, disassemble, ດັດແກ້, ເຊົ່າ, ເຊົ່າ, ກູ້ຢືມ, ແຈກຢາຍ, sublicense, ສ້າງວຽກງານອະນຸພັນໂດຍອີງໃສ່ທັງຫມົດຫຼືພາກສ່ວນໃດຫນຶ່ງ. ຂອງຊອບແວໄດ້.
ຄູ່ມືການບໍລິການການຮັບປະກັນຜະລິດຕະພັນ Hesai ແມ່ນຢູ່ໃນຫນ້ານະໂຍບາຍການຮັບປະກັນຂອງເຈົ້າຫນ້າທີ່ Hesai webເວັບໄຊ: https://www.hesaitech.com/en/legal/warranty
Hesai Technology Co., Ltd.
ໂທລະສັບ: +86 400 805 1233
Webເວັບໄຊ: www.hesaitech.com
ທີ່ຢູ່: ຕຶກ L2, Hongqiao World Centre, Shanghai, ຈີນ
ອີເມວທຸລະກິດ: info@hesaitech.com
ອີເມວການບໍລິການ: service@hesaitech.com