![]() ផេនដាView 2
ផេនដាView 2
ចំណុចពពក
កម្មវិធីមើលឃើញ
សៀវភៅណែនាំអ្នកប្រើប្រាស់
ផេនដាView 2 Point Cloud Visualization Software
www.hesaitech.com
 HESAI Wechat
HESAI Wechat
http://weixin.qq.com/r/Fzns9IXEl9jorcGX92wF
កំណែឯកសារ៖ PV2-en-230710
អំពីសៀវភៅណែនាំនេះ។
■ ការប្រើប្រាស់សៀវភៅណែនាំនេះ។
- ត្រូវប្រាកដថាអានតាមរយៈសៀវភៅណែនាំអ្នកប្រើប្រាស់នេះ មុនពេលប្រើលើកដំបូងរបស់អ្នក ហើយធ្វើតាមការណែនាំនៅទីនេះ នៅពេលអ្នកដំណើរការផលិតផល។ ការខកខានក្នុងការអនុលោមតាមការណែនាំអាចបណ្តាលឱ្យខូចផលិតផល បាត់បង់ទ្រព្យសម្បត្តិ របួសផ្ទាល់ខ្លួន និង/ឬបំពានការធានា។
- សៀវភៅណែនាំអ្នកប្រើប្រាស់នេះមិនមានព័ត៌មានស្តីពីការបញ្ជាក់ផលិតផលទេ។ សូមពិនិត្យមើលសញ្ញាបញ្ជាក់នៅលើចានខាងក្រោមរបស់ផលិតផល ហើយអានតាមរយៈការព្រមានអំពីវិញ្ញាបនប័ត្រដែលត្រូវគ្នា។
- ប្រសិនបើអ្នកបញ្ចូលផលិតផល lidar នេះទៅក្នុងផលិតផលរបស់អ្នក អ្នកត្រូវផ្តល់សៀវភៅណែនាំអ្នកប្រើប្រាស់នេះ (ឬមធ្យោបាយដើម្បីចូលប្រើសៀវភៅណែនាំអ្នកប្រើប្រាស់នេះ) ដល់អ្នកប្រើប្រាស់ដែលមានបំណងនៃផលិតផលរបស់អ្នក
- ផលិតផល lidar នេះត្រូវបានបម្រុងទុកជាធាតុផ្សំនៃផលិតផលបញ្ចប់។ វាត្រូវបានវាយតម្លៃជាផលិតផលចុងក្រោយស្របតាមស្តង់ដារដែលពាក់ព័ន្ធ។
■ ការចូលប្រើសៀវភៅណែនាំនេះ។
ដើម្បីទទួលបានកំណែចុងក្រោយបំផុត៖
- ចូលទៅកាន់ទំព័រទាញយកផ្លូវការរបស់ Hesai webគេហទំព័រ៖ https://www.hesaitech.com/en/download
- ឬទាក់ទងអ្នកតំណាងផ្នែកលក់របស់អ្នកនៅ Hesai
- ឬទាក់ទងក្រុមគាំទ្របច្ចេកទេសរបស់ Hesai៖ service@hesaitech.com
■ ជំនួយបច្ចេកទេស
ប្រសិនបើសំណួររបស់អ្នកមិនត្រូវបានដោះស្រាយនៅក្នុងសៀវភៅណែនាំអ្នកប្រើប្រាស់នេះទេ សូមទាក់ទងមកយើងខ្ញុំតាមរយៈ៖
service@hesaitech.com
www.hesaitech.com/en/support
https://github.com/HesaiTechnology (សូមទុកសំណួររបស់អ្នកនៅក្រោមគម្រោង GitHub ដែលត្រូវគ្នា។ )
■រឿងព្រេង
![]() ការព្រមាន៖ ការណែនាំដែលត្រូវតែអនុវត្តតាម ដើម្បីធានាបាននូវសុវត្ថិភាព និងការប្រើប្រាស់ផលិតផលត្រឹមត្រូវ។
ការព្រមាន៖ ការណែនាំដែលត្រូវតែអនុវត្តតាម ដើម្បីធានាបាននូវសុវត្ថិភាព និងការប្រើប្រាស់ផលិតផលត្រឹមត្រូវ។
![]() កំណត់ចំណាំ៖ ព័ត៌មានបន្ថែមដែលអាចមានប្រយោជន៍។
កំណត់ចំណាំ៖ ព័ត៌មានបន្ថែមដែលអាចមានប្រយោជន៍។
សេចក្តីផ្តើម
ផេនដាView 2 គឺជាកម្មវិធីជំនាន់ទីពីរដែលកត់ត្រា និងបង្ហាញទិន្នន័យពពកចំណុចពី Hesai lidars ដែលមាននៅក្នុង៖
- 64 ប៊ីត Windows 10
- អ៊ូប៊ុនទូ 16.04/18.04/20.04
![]() ប្រសិនបើកុំព្យូទ័ររបស់អ្នកប្រើកាតក្រាហ្វិក AMD ហើយដំណើរការលើ Ubuntu-20.04 សូមទាញយកកម្មវិធីបញ្ជាក្រាហ្វិកដែលគាំទ្រ Ubuntu-20.04 ពីផ្លូវការរបស់ AMD webគេហទំព័រ។ សម្រាប់ការណែនាំបន្ថែម សូមទាក់ទងផ្នែកជំនួយបច្ចេកទេស Hesai ។
ប្រសិនបើកុំព្យូទ័ររបស់អ្នកប្រើកាតក្រាហ្វិក AMD ហើយដំណើរការលើ Ubuntu-20.04 សូមទាញយកកម្មវិធីបញ្ជាក្រាហ្វិកដែលគាំទ្រ Ubuntu-20.04 ពីផ្លូវការរបស់ AMD webគេហទំព័រ។ សម្រាប់ការណែនាំបន្ថែម សូមទាក់ទងផ្នែកជំនួយបច្ចេកទេស Hesai ។
សៀវភៅណែនាំនេះពិពណ៌នាអំពី PandarView ២.០.១០១. ម៉ូដែលផលិតផលដែលគាំទ្រ៖
| ផេនដា ៤០ Pandar 40M Pandar40P ផេនដា ៤០ |
Pandar128E3X | PandarQT QT128C2X |
PandarXT PandarXT-16 XT32M2X |
AT128E2X | FT120 |
ការដំឡើង
ទាញយកការដំឡើង files ពីមន្ត្រីរបស់ Hesai webគេហទំព័រ ឬទាក់ទងផ្នែកជំនួយបច្ចេកទេស៖ www.hesaitech.com/en/download
| ប្រព័ន្ធ | ការដំឡើង Files |
| វីនដូ | ផេនដាView_Release_Win64_V2.x.xx.msi |
| អ៊ូប៊ុនទូ | ផេនដាView_Release_Ubuntu_V2.x.xx.bin |
![]() នៅក្នុង Ubuntu សូមដំណើរការ PandarView.sh ក្នុង ក file ផ្លូវដែលមានតែតួអក្សរ ASCII ។
នៅក្នុង Ubuntu សូមដំណើរការ PandarView.sh ក្នុង ក file ផ្លូវដែលមានតែតួអក្សរ ASCII ។
ចំណុចប្រទាក់កម្មវិធីត្រូវបានបែងចែកជាបួនផ្នែកដូចបានបង្ហាញខាងក្រោម (ព័ត៌មានលម្អិតអាចខុសគ្នា)។
"អំពី" នៅក្នុងរបារម៉ឺនុយបង្ហាញកំណែកម្មវិធី។
ពិនិត្យមើល Live Point Cloud
ដើម្បីទទួលបានទិន្នន័យនៅលើកុំព្យូទ័ររបស់អ្នក សូមកំណត់អាសយដ្ឋាន IP របស់កុំព្យូទ័រទៅ 192.168.1.100 និងរបាំងបណ្ដាញរងទៅ 255.255.255.0
| សម្រាប់អ៊ូប៊ុនទូ៖ | សម្រាប់ Windows៖ |
| បញ្ចូលពាក្យបញ្ជា ifconfig នេះនៅក្នុងស្ថានីយ៖ ~$ sudo ifconfig enp0s20f0u2 192.168.1.100 (ជំនួស enp0s20f0u2 ជាមួយឈ្មោះច្រកអ៊ីសឺរណិតមូលដ្ឋាន) |
បើកមជ្ឈមណ្ឌលចែករំលែកបណ្តាញចុចលើ "អ៊ីសឺរណិត" នៅក្នុងប្រអប់ "ស្ថានភាពអ៊ីសឺរណិត" ចុចលើ "លក្ខណសម្បត្តិ" ចុចពីរដងលើ “Internet Protocol Version 4 (TCP/IPv4)” កំណត់រចនាសម្ព័ន្ធអាសយដ្ឋាន IP ទៅ 192.168.1.100 និងរបាំងបណ្ដាញរងទៅ 255.255.255.0 |
3.1 ការកំណត់រចនាសម្ព័ន្ធសុវត្ថិភាពតាមអ៊ីនធឺណិត
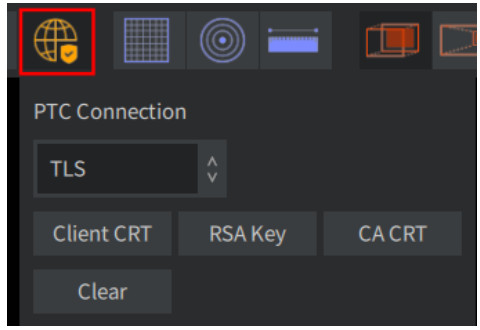
សម្រាប់ម៉ូដែលផលិតផលដែលគាំទ្រ Cybersecurity, ![]() (សុវត្ថិភាពតាមអ៊ីនធឺណិត) នឹងបង្ហាញនៅក្នុងរបារឧបករណ៍។
(សុវត្ថិភាពតាមអ៊ីនធឺណិត) នឹងបង្ហាញនៅក្នុងរបារឧបករណ៍។
អ្នកប្រើប្រាស់អាចជ្រើសរើសរបៀបមួយក្នុងចំណោមរបៀបទាំងបី៖
■ របៀប TLS
នៅក្នុងរបៀប TLS, PandarView 2 ទាញយកការកែតម្រូវឯកតា lidar ដោយស្វ័យប្រវត្តិ files ដោយប្រើពាក្យបញ្ជា PTCS (PTC over TLS) ។
| ទំព័រសុវត្ថិភាពរបស់ web គ្រប់គ្រង | បើក Cyber Security Master Switch ។ |
| ជ្រើសរើស TLS សម្រាប់ការតភ្ជាប់ PTC ។ | |
| ផេនដាView 2 | ជ្រើសរើស TLS សម្រាប់ការតភ្ជាប់ PTC ។ |
| ចុចប៊ូតុង "CA CRT" ហើយបញ្ជាក់ file ផ្លូវនៃខ្សែសង្វាក់វិញ្ញាបនបត្រ CA របស់ Hesai (Hesai_Ca_Chain.crt) ។ |
■ របៀប mTLS
នៅក្នុងរបៀប mTLS, PandarView 2 ទាញយកការកែតម្រូវឯកតា lidar ដោយស្វ័យប្រវត្តិ files ដោយប្រើពាក្យបញ្ជា PTCS ។
| ទំព័រសុវត្ថិភាពរបស់ web គ្រប់គ្រង | បើក Cyber Security Master Switch ។ |
| ជ្រើសរើស mTLS សម្រាប់ការតភ្ជាប់ PTC; បង្ហោះខ្សែសង្វាក់វិញ្ញាបនបត្រ CA របស់អ្នកប្រើ។ | |
| ផេនដាView 2 | ជ្រើសរើស mTLS សម្រាប់ការតភ្ជាប់ PTC ។ |
| ចុចប៊ូតុង "CA CRT"; បញ្ជាក់ file ផ្លូវនៃខ្សែសង្វាក់វិញ្ញាបនបត្រ Hesai CA (Hesai_Ca_Chain.crt) ។ | |
| ចុចប៊ូតុង "អតិថិជន CRT"; បញ្ជាក់ file ផ្លូវនៃវិញ្ញាបនបត្រនីតិបុគ្គលអ្នកប្រើប្រាស់។ | |
| ចុចប៊ូតុង "RSA Key"; បញ្ជាក់ file ផ្លូវនៃសោឯកជនរបស់អ្នកប្រើ (ដែលត្រូវគ្នានឹងវិញ្ញាបនបត្រនីតិបុគ្គលអ្នកប្រើប្រាស់)។ |
![]() ប៊ូតុង "ជម្រះ" លុបអ្វីដែលបានបញ្ជាក់ file ផ្លូវសម្រាប់ CA CRT, អតិថិជន CRT និង RSA Key ។
ប៊ូតុង "ជម្រះ" លុបអ្វីដែលបានបញ្ជាក់ file ផ្លូវសម្រាប់ CA CRT, អតិថិជន CRT និង RSA Key ។
■ សុវត្ថិភាពតាមអ៊ីនធឺណិតត្រូវបានបិទ
នៅក្នុងរបៀបនេះ PandarView 2 ទាញយកការកែតម្រូវឯកតា lidar ដោយស្វ័យប្រវត្តិ files ដោយប្រើពាក្យបញ្ជា PTC ។
| ទំព័រសុវត្ថិភាពរបស់ web គ្រប់គ្រង | បិទ Cyber Security Master Switch |
| ផេនដាView 2 | ជ្រើសរើស Non-TLS សម្រាប់ការតភ្ជាប់ PTC |
3.2 ទទួលទិន្នន័យផ្ទាល់
- របារឧបករណ៍៖
 (ស្តាប់សុទ្ធ)
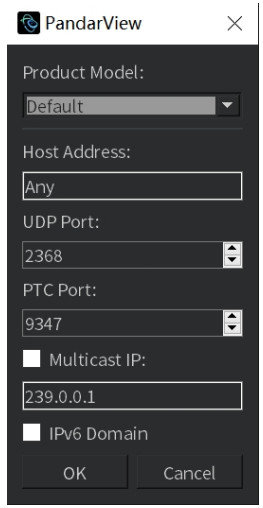
(ស្តាប់សុទ្ធ) - នៅក្នុងប្រអប់លេចឡើង៖
| ម៉ូដែលផលិតផល | លំនាំដើម |
| អាសយដ្ឋានម៉ាស៊ីន | ណាមួយ។ |
| ច្រក UDP | គួរតែដូចគ្នានឹង "ច្រកគោលដៅ Lidar" នៅក្នុងទំព័រការកំណត់ web គ្រប់គ្រង។ 2368 តាមលំនាំដើម។ |
| ច្រក PTC | ប្រើសម្រាប់ការបញ្ជូនពាក្យបញ្ជា PTC ។ 9347 តាមលំនាំដើម។ |
| Multicast IP | នៅក្នុងរបៀបពហុខាស ធីកប្រអប់ធីក ហើយបញ្ជាក់ក្រុមពហុខាស |
| ដែន IPv6 | គាំទ្រតែលើម៉ូដែលផលិតផលមួយចំនួនប៉ុណ្ណោះ។ |
![]() ពេលទទួលបានទិន្នន័យផ្ទាល់៖
ពេលទទួលបានទិន្នន័យផ្ទាល់៖
- អ្នកប្រើប្រាស់អាចនាំចេញការកែតម្រូវមុំ file និងការកែតម្រូវពេលវេលាបាញ់ fileសូមមើលផ្នែក 5.1 (ចំណុចកែពពក)។
 ប៊ូតុង (ការស្ទ្រីមផ្ទាល់) នៅក្នុងកុងសូលអនុញ្ញាតឱ្យការផ្សាយទិន្នន័យបន្តផ្ទាល់ដែលមានភាពយឺតយ៉ាវអប្បបរមា។
ប៊ូតុង (ការស្ទ្រីមផ្ទាល់) នៅក្នុងកុងសូលអនុញ្ញាតឱ្យការផ្សាយទិន្នន័យបន្តផ្ទាល់ដែលមានភាពយឺតយ៉ាវអប្បបរមា។
![]()
3.3 កត់ត្រាទិន្នន័យផ្ទាល់
ចុច ![]() (កត់ត្រា) នៅក្នុងកុងសូល ហើយបញ្ជាក់ ក file ថត។ ចុច "រក្សាទុក" ដើម្បីចាប់ផ្តើមថត .pcap file.
(កត់ត្រា) នៅក្នុងកុងសូល ហើយបញ្ជាក់ ក file ថត។ ចុច "រក្សាទុក" ដើម្បីចាប់ផ្តើមថត .pcap file.
![]() ពេលដាក់ឈ្មោះ .pcap files នៅក្នុង Ubuntu រួមបញ្ចូល fileផ្នែកបន្ថែមឈ្មោះ (.pcap) ។
ពេលដាក់ឈ្មោះ .pcap files នៅក្នុង Ubuntu រួមបញ្ចូល fileផ្នែកបន្ថែមឈ្មោះ (.pcap) ។
លេង Back Point Cloud
4.1 បើក .PCAP File
- ចុច
 (បើក File) នៅក្នុងរបារឧបករណ៍ ហើយជ្រើសរើស .pcap file នៅក្នុងបង្អួចលេចឡើង។
(បើក File) នៅក្នុងរបារឧបករណ៍ ហើយជ្រើសរើស .pcap file នៅក្នុងបង្អួចលេចឡើង។
ជាជម្រើស អូស .pcap មួយ។ file ចូលទៅក្នុង PandarView 2. - នៅពេលការផ្ទុកត្រូវបានបញ្ចប់ ផ្លូវពពកមួយនឹងបង្ហាញនៅក្នុងកុងសូល។

![]() កំណត់ចំណាំ
កំណត់ចំណាំ
- គាំទ្រតែទម្រង់ tcpdump pcap ប៉ុណ្ណោះ។
- គាំទ្រតែការតាមដានពពកមួយចំណុចប៉ុណ្ណោះក្នុងពេលមួយ៖ ពេលទទួលទិន្នន័យផ្ទាល់ ឬបើក .pcap ថ្មី។ fileបទមុននឹងត្រូវបានលុបដោយស្វ័យប្រវត្តិ។
- ធំ.pcap files អាចចំណាយពេលបន្តិចដើម្បីផ្ទុក។ ពេលកំពុងផ្ទុកសូមចុច (ការផ្សាយបន្តផ្ទាល់) ដើម្បីចាក់ទិន្នន័យពពកក្នុងពេលតែមួយ។
- ប្រសិនបើម៉ូដែលផលិតផល lidar និងលេខច្រកមិនត្រូវបានបង្ហាញពេញលេញទេ សូមរំកិលកង់កណ្ដុរ។
4.2 ការគ្រប់គ្រងការលេង 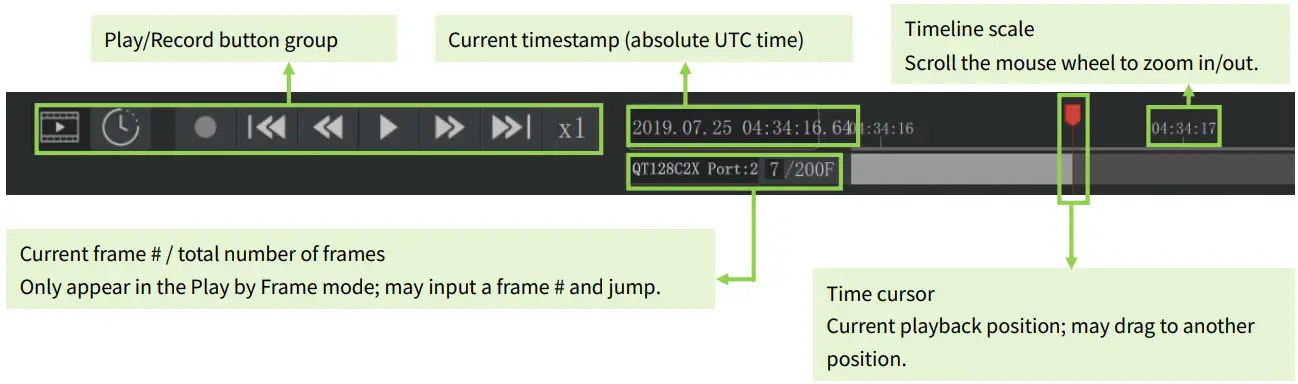
| ប៊ូតុង | ការពិពណ៌នា |
 |
ឆ្វេង៖ លេងតាមស៊ុម (លំនាំដើម) ស្តាំ៖ លេងតាមពេលវេលា |
 |
លោតទៅដើមឬចុងបញ្ចប់នៃ file |
 |
ឆ្វេង៖ លៃតម្រូវល្បឿនបង្វិលឡើងវិញ (1x, 1/2x, 1/4x, 1/8x, …, 1/64x) ស្តាំ៖ លៃតម្រូវល្បឿនបញ្ជូនបន្ត (1x, 2x, 4x, 8x, …, 64x) |
 |
ខាងឆ្វេង៖ បន្ទាប់ពីផ្ទុក ក file, ចុចដើម្បីលេង។ ត្រឹមត្រូវ៖ ពេលកំពុងលេង ក file, ចុចដើម្បីផ្អាក។ |
 |
បង្ហាញល្បឿនបច្ចុប្បន្ន |
| ពេលកំពុងផ្ទុក ក fileចុចដើម្បីលេងក្នុងពេលតែមួយ។ (ប៊ូតុងនេះបាត់នៅពេលការផ្ទុកបានបញ្ចប់។) នៅពេលទទួលបានទិន្នន័យបន្តផ្ទាល់ សូមចុចដើម្បីផ្សាយដោយមានរយៈពេលយឺតអប្បបរមា។ |
ការកែតម្រូវ និងការកំណត់រចនាសម្ព័ន្ធ
នៅពេលពិនិត្យមើលពពកចំណុចបន្តផ្ទាល់ ឬលេងពពកចំណុចដែលបានកត់ត្រាឡើងវិញ ការកែតម្រូវ files និងការកំណត់រចនាសម្ព័ន្ធ files អាចត្រូវបានប្រើ។
5.1 ចំណុចកែពពក
| ការកែតម្រូវមុំ | កែតម្រូវទិន្នន័យ azimuth និងកម្ពស់។ សូមមើលផ្នែកទី 1.3 (ការចែកចាយឆានែល) នៅក្នុងសៀវភៅណែនាំអ្នកប្រើប្រាស់ lidar ។ |
| ការកែតម្រូវពេលភ្លើង | សម្រាប់ម៉ូដែលផលិតផលមួយចំនួន៖ កែតម្រូវ azimuth នៃចំណុចទិន្នន័យពពកយោងទៅតាមពេលវេលាបាញ់នៃឆានែលនីមួយៗ។ |
| ការកែតម្រូវចម្ងាយ | សម្រាប់ម៉ូដែលផលិតផលជាក់លាក់៖ កែទិន្នន័យចម្ងាយ។ |
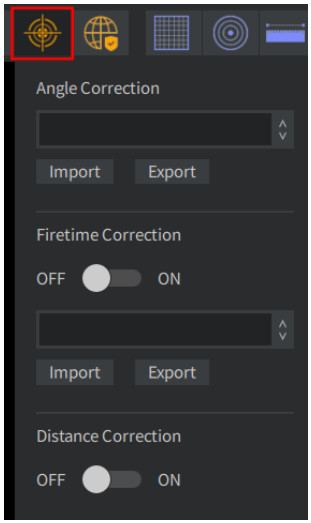
ចុច ![]() (ការកែតម្រូវ) នៅក្នុងរបារឧបករណ៍៖
(ការកែតម្រូវ) នៅក្នុងរបារឧបករណ៍៖
| ប្រភេទនៃការកែតម្រូវ | ការពិពណ៌នា |
| ការកែតម្រូវមុំ | នៅពេលពិនិត្យមើលពពកចំណុចផ្សាយផ្ទាល់៖ • PandarView 2 ទាញយកការកែតម្រូវដោយស្វ័យប្រវត្តិ file នៃអង្គភាព lidar នេះ។ នៅពេលចាក់ឡើងវិញ ពពកចំណុចដែលបានកត់ត្រា៖ • PandarView 2 បង្ហោះការកែតម្រូវទូទៅដោយស្វ័យប្រវត្តិ file សម្រាប់ម៉ូដែលផលិតផលនេះ។ • សម្រាប់ការបង្ហាញល្អបំផុត ចុច "នាំចូល" ហើយជ្រើសរើសការកែតម្រូវ file នៃអង្គភាព lidar នេះ។ |
| ការកែតម្រូវពេលភ្លើង | QT128C2X៖ • នៅពេលពិនិត្យមើលពពកចំណុចផ្សាយផ្ទាល់៖ PandarView 2 ទាញយកការកែតម្រូវដោយស្វ័យប្រវត្តិ file នៃអង្គភាព lidar នេះ; ប្តូរទៅ ON ហើយចាប់ផ្តើមកែតម្រូវ។ • នៅពេលចាក់ឡើងវិញនូវចំណុចដែលបានកត់ត្រាទុក៖ PandarView 2 បង្ហោះការកែតម្រូវទូទៅដោយស្វ័យប្រវត្តិ file សម្រាប់ម៉ូដែលផលិតផលនេះ; ប្តូរទៅ ON ហើយចាប់ផ្តើមកែតម្រូវ។ ម៉ូដែលផលិតផលផ្សេងទៀត៖ • ប្តូរទៅ ON ចុច “នាំចូល” ហើយជ្រើសរើសការកែតម្រូវ file នៃអង្គភាព lidar នេះ។ • ប្រសិនបើការកែតម្រូវរបស់អង្គភាព lidar file មិនមាននៅក្នុងមូលដ្ឋានទេ សូមប្តូរទៅ ON ហើយជ្រើសរើសការកែតម្រូវទូទៅ file សម្រាប់ម៉ូដែលផលិតផលនេះនៅក្នុងម៉ឺនុយទម្លាក់ចុះ។ |
| ការកែតម្រូវចម្ងាយ | ប្តូរទៅ ON ។ |
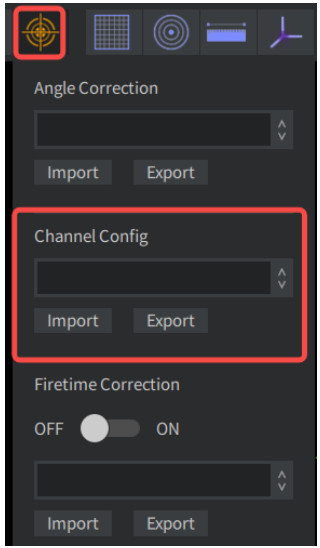
5.2 ការកំណត់រចនាសម្ព័ន្ធឆានែល
ការកំណត់រចនាសម្ព័ន្ធឆានែល file ជ្រើសរើសសំណុំរងពីឆានែលដែលមានទាំងអស់នៃ lidar កំណត់ចំនួនប្លុកនៅក្នុងកញ្ចប់ទិន្នន័យ Point Cloud ហើយបញ្ជាក់ឆានែលដែលត្រូវរក្សាទុកក្នុងប្លុកនីមួយៗ។
មានសម្រាប់តែ QT128C2X៖
- នៅពេលពិនិត្យមើលពពកចំណុចផ្សាយផ្ទាល់៖ PandarView 2 ទាញយកការកំណត់រចនាសម្ព័ន្ធឆានែលដោយស្វ័យប្រវត្តិ file នៃអង្គភាព lidar នេះ។
- នៅពេលចាក់ឡើងវិញ ពពកចំណុចដែលបានកត់ត្រា៖ ចុច
 (ការកែតម្រូវ) នៅក្នុងរបារឧបករណ៍ ចុច "នាំចូល" នៅក្នុងផ្នែកកំណត់រចនាសម្ព័ន្ធឆានែល ហើយជ្រើសរើសការកំណត់រចនាសម្ព័ន្ធឆានែល file នៃអង្គភាព lidar នេះ។
(ការកែតម្រូវ) នៅក្នុងរបារឧបករណ៍ ចុច "នាំចូល" នៅក្នុងផ្នែកកំណត់រចនាសម្ព័ន្ធឆានែល ហើយជ្រើសរើសការកំណត់រចនាសម្ព័ន្ធឆានែល file នៃអង្គភាព lidar នេះ។
5.3 File នាំចូល និងនាំចេញ
File នាំចូល
- នៅពេលពិនិត្យមើលពពកចំណុចបន្តផ្ទាល់ ប៊ូតុង "នាំចេញ" អាចត្រូវបានប្រើដើម្បីទាញយកការកែតម្រូវ ឬការកំណត់រចនាសម្ព័ន្ធ files នៃអង្គភាព lidar នេះ។
- នៅពេលដាក់ឈ្មោះទាំងនេះ files នៅក្នុងអ៊ូប៊ុនទូ ត្រូវប្រាកដថាបញ្ចូល fileផ្នែកបន្ថែមឈ្មោះ (.dat សម្រាប់កែមុំ files នៃគ្រួសារ AT និង .csv សម្រាប់អ្នកដទៃ)។
File នាំចេញ
- ការកែតម្រូវ ឬការកំណត់ដែលបាននាំចូល files ត្រូវបានបន្ថែមទៅផ្នែកខាងក្រោមនៃម៉ឺនុយទម្លាក់ចុះ។
- ប្រសិនបើអ្នកលែងត្រូវការវាទៀតហើយ files អ្នកអាចលុបពួកវាចេញពីផ្លូវខាងក្រោម (មានប្រសិទ្ធភាពបន្ទាប់ពីចាប់ផ្តើម Pandar ឡើងវិញView 2): ឯកសារ\PandaViewទិន្នន័យFiles\csv
លក្ខណៈពិសេសផ្សេងទៀត។
6.1 ផ្លូវកាត់កណ្តុរ
| អូសប៊ូតុងឆ្វេង | បង្វិលចំណុចពពក |
| អូសប៊ូតុងស្តាំ | ពង្រីក/បង្រួម៖ អូសទៅឆ្វេងសម្រាប់ពង្រីក និងស្តាំសម្រាប់ពង្រីក |
| រមូរកង់ | ពង្រីក/បង្រួម៖ រំកិលចុះក្រោមសម្រាប់ពង្រីក និងឡើងលើសម្រាប់ពង្រីក |
| ចុចកង់ហើយអូស | ផាន view |
| Shift & Left-button Drag | បង្វិលចំណុចពពកជុំវិញ viewទិសដៅ (ទិសដៅពី viewចង្អុលទៅប្រភពដើមនៃកូអរដោនេ) |
| Shift & Right-button Drag | ផាន view |
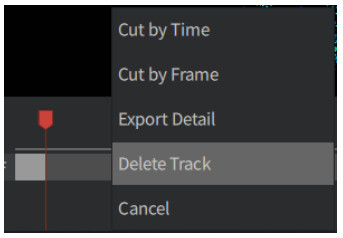
6.2 ចំណុច Cloud Tracks
ចុចកណ្ដុរស្ដាំលើចំណុច Cloud Track៖
| កាត់តាមពេលវេលា | បញ្ជាក់ពេលវេលាចាប់ផ្តើម/បញ្ចប់amps កាត់បទបច្ចុប្បន្ន ហើយរក្សាទុកទៅ .pcap ថ្មី។ file. |
| កាត់ដោយស៊ុម | បញ្ជាក់ស៊ុមចាប់ផ្តើម/បញ្ចប់ កាត់បទបច្ចុប្បន្ន ហើយរក្សាទុកទៅ .pcap ថ្មី។ file. |
| ព័ត៌មានលម្អិតនាំចេញ | បន្ទាប់ពីជ្រើសរើសតំបន់នៃចំណុច (សូមមើលផ្នែកទី 6.3 របារឧបករណ៍ – ការជ្រើសរើសចំណុច និងតារាងទិន្នន័យ) បញ្ជាក់ស៊ុមចាប់ផ្តើម/បញ្ចប់ ហើយនាំចេញទិន្នន័យពពកចំណុចដែលត្រូវគ្នាទៅ .csv files. · ប្រើ ·នៅពេលដាក់ឈ្មោះទាំងនេះ files នៅក្នុងអ៊ូប៊ុនទូ ត្រូវប្រាកដថាបញ្ចូល fileផ្នែកបន្ថែមឈ្មោះ (.csv) ។ |
| លុបបទ | លុបបទបច្ចុប្បន្ន។ |
| បោះបង់ | បិទម៉ឺនុយចុចខាងស្តាំ។ |
6.3 របារឧបករណ៍
ប្រសិនបើ PandarView 2 បង្អួចតូចចង្អៀតពេកក្នុងការបង្ហាញរបារឧបករណ៍ពេញ សូមរំកិលកង់កណ្ដុរទៅ view ប៊ូតុងទាំងអស់។
■ ក្រឡាចត្រង្គសំរបសំរួល ប្រព័ន្ធសំរបសំរួល និងការវាស់ចម្ងាយ 
| ឈ្មោះប៊ូតុង | មុខងារ |
| ខាតេសៀន | បង្ហាញ/លាក់ក្រឡាចត្រង្គដែលមានគម្លាត 30 ម៉ែត្រ |
| ប៉ូល។ | បង្ហាញ/លាក់រង្វង់សមមូលដែលមានគម្លាត 10 ម៉ែត្រ |
| អ្នកគ្រប់គ្រង | អូសប៊ូតុងឆ្វេង ដើម្បីវាស់ចម្ងាយរវាងចំណុចពីរ |
| កូអរដោនេ | បង្ហាញប្រព័ន្ធកូអរដោណេចតុកោណ |
■ របៀបបញ្ចាំង

| ឈ្មោះប៊ូតុង | មុខងារ |
| ការព្យាករណ៍អក្ខរក្រម | – |
| ការព្យាករណ៍ទស្សនវិស័យ | – |
■ ចំណុច View និងការបង្វិល
| ឈ្មោះប៊ូតុង | មុខងារ |
| ខាងមុខ / ខាងក្រោយ / ឆ្វេង / ស្តាំ / កំពូល | – |
| បង្វិល | បង្វិល viewទិសដៅ (ទិសដៅពី viewចង្អុលទៅប្រភពដើមនៃកូអរដោនេ) ជុំវិញអ័ក្ស Z |
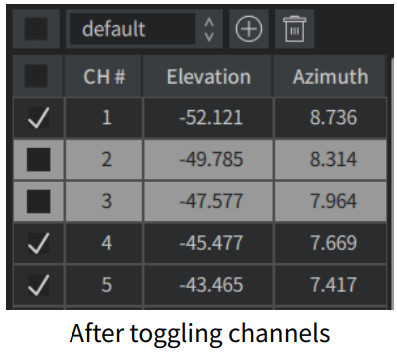
■ ការជ្រើសរើសឆានែល 
ចុច ![]() (ឆានែល) ទៅ view ឬផ្លាស់ប្តូរបណ្តាញដែលបានបង្ហាញបច្ចុប្បន្ន។
(ឆានែល) ទៅ view ឬផ្លាស់ប្តូរបណ្តាញដែលបានបង្ហាញបច្ចុប្បន្ន។
បង្ហាញឬលាក់ឆានែល
- ធីក/ដោះធីកប្រអប់នៅខាងឆ្វេងនៃឆានែលនីមួយៗ ដើម្បីបង្ហាញ/លាក់ទិន្នន័យពពកចំណុចរបស់វា។
- តាមលំនាំដើម ប៉ុស្តិ៍ទាំងអស់ត្រូវបានបង្ហាញ។
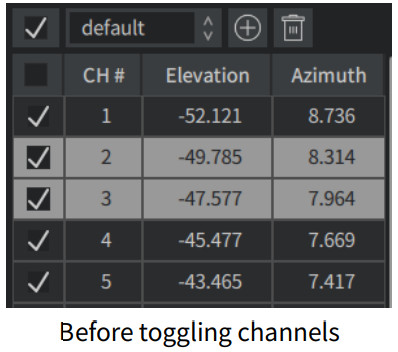
ជ្រើសរើស និងបិទបើកឆានែល
- ចុចលើឆានែលមួយ (មិនរាប់បញ្ចូលតំបន់នៃប្រអប់ធីករបស់វា) ដើម្បីជ្រើសរើស និងបន្លិចឆានែលនេះ។
- សង្កត់ Shift ខណៈពេលចុចដើម្បីជ្រើសរើសប៉ុស្តិ៍ជិតខាងជាច្រើន។
- សង្កត់ Ctrl ខណៈពេលចុចដើម្បីជ្រើសរើសឆានែលដាច់ដោយឡែកជាច្រើន។
- ចុច
 (បិទ/បើកប៉ុស្តិ៍ដែលបានជ្រើស) នៅជ្រុងកំពូលឆ្វេង ដើម្បីបិទ/បើកឆានែលដែលបានជ្រើសរវាងបានធីក និងមិនបានធីក។
(បិទ/បើកប៉ុស្តិ៍ដែលបានជ្រើស) នៅជ្រុងកំពូលឆ្វេង ដើម្បីបិទ/បើកឆានែលដែលបានជ្រើសរវាងបានធីក និងមិនបានធីក។
រក្សាទុកក្រុមឆានែល
- ចុច
 ដើម្បីរក្សាទុកឆានែលដែលបានពិនិត្យជាការកំណត់រចនាសម្ព័ន្ធ ហើយដាក់ឈ្មោះវា។
ដើម្បីរក្សាទុកឆានែលដែលបានពិនិត្យជាការកំណត់រចនាសម្ព័ន្ធ ហើយដាក់ឈ្មោះវា។ - ការកំណត់រចនាសម្ព័ន្ធដែលបានរក្សាទុកពីមុនមានបន្ទាប់ពីចាប់ផ្តើម Pandar ឡើងវិញView 2 និងអាចត្រូវបានជ្រើសរើសនៅក្នុង
 ម៉ឺនុយទម្លាក់ចុះ។
ម៉ឺនុយទម្លាក់ចុះ។ - ដើម្បីលុបការកំណត់ដែលបានជ្រើសរើសបច្ចុប្បន្នសូមចុច
 .
.
■ ការជ្រើសរើសចំណុច និងតារាងទិន្នន័យ
ចុច ![]() (ជ្រើសរើស) ហើយអូសកណ្ដុរដើម្បីបន្លិចតំបន់នៃចំណុចមួយ។
(ជ្រើសរើស) ហើយអូសកណ្ដុរដើម្បីបន្លិចតំបន់នៃចំណុចមួយ។
ចុច ![]() (សន្លឹកបៀរ) ទៅ view ទិន្នន័យនៃចំណុចដែលបានបន្លិចដូចបានបង្ហាញខាងក្រោម។
(សន្លឹកបៀរ) ទៅ view ទិន្នន័យនៃចំណុចដែលបានបន្លិចដូចបានបង្ហាញខាងក្រោម។ 
នៅពេលចុចពីរដងលើវាលដែលមានចំណងជើងច្រើនដង សកម្មភាពខាងក្រោមត្រូវបានអនុវត្តម្តងមួយៗ៖
- សម្រួលទទឹងជួរឈរទៅនឹងឈ្មោះវាល
(ជាជម្រើស ដាក់ទស្សន៍ទ្រនិចកណ្ដុររវាងក្បាលពីរ ដើម្បីឱ្យទស្សន៍ទ្រនិចក្លាយជាព្រួញឆ្វេងស្តាំ អូសកណ្ដុរដើម្បីកែតម្រូវទទឹងជួរឈរ។) - តម្រៀបវាលនេះដោយលំដាប់ឡើង។ ព្រួញឡើងលើ
 នឹងបង្ហាញនៅខាងស្តាំ។
នឹងបង្ហាញនៅខាងស្តាំ។ - តម្រៀបវាលនេះតាមលំដាប់ចុះ។ ព្រួញចុះក្រោម
 នឹងបង្ហាញនៅខាងស្តាំ។
នឹងបង្ហាញនៅខាងស្តាំ។ - បោះបង់ការតម្រៀប។
ក្រុមប៊ូតុងនៅជ្រុងខាងលើឆ្វេង៖

| ជ្រើសរើសទាំងអស់។ | ចុចដើម្បីបង្ហាញទិន្នន័យនៃចំណុចទាំងអស់នៅក្នុងស៊ុមនេះ។ ចុចម្តងទៀតដើម្បីបង្ហាញតែទិន្នន័យនៃចំណុចដែលបានជ្រើសរើស។ |
| នាំចេញព័ត៌មានពិន្ទុ | នាំចេញតារាងទិន្នន័យបច្ចុប្បន្នទៅជា .csv file. |
| រក្សាទុកលំដាប់ជួរឈរ | រក្សាទុកលំដាប់វាលបច្ចុប្បន្ន។ ការកំណត់នេះនៅតែមានប្រសិទ្ធភាពបន្ទាប់ពីចាប់ផ្តើម Pandar ឡើងវិញView 2. |
វាលក្នុងតារាងទិន្នន័យត្រូវបានកំណត់ដូចខាងក្រោម៖
| Ch | ឆានែល # |
| AziCorr | Azimuth កែតម្រូវដោយការកែមុំ file |
| ចម្ងាយ | ចម្ងាយ |
| Rfl | ការឆ្លុះបញ្ចាំង |
| អាហ្ស៊ី | Azimuth (មុំយោងបច្ចុប្បន្នរបស់ rotor) |
| អេល | ការកាត់បន្ថយ |
| t | ពេលវេលាamp |
| វាល | សម្រាប់ម៉ូដែលផលិតផលគ្រួសារ AT៖ ផ្ទៃកញ្ចក់ដែលការវាស់វែងនេះត្រូវបានធ្វើឡើង។ វាល 1/2/3 ត្រូវគ្នាទៅនឹងផ្ទៃកញ្ចក់ 0/1/2 រៀងគ្នា។ |
| អាហ្ស៊ីរដ្ឋ | រដ្ឋ Azimuth ប្រើសម្រាប់គណនាពេលវេលាបាញ់អុហ្វសិតនៃឆានែលនីមួយៗ; សម្រាប់តែម៉ូដែល lidar មួយចំនួនប៉ុណ្ណោះ។ |
| ទំនុកចិត្ត | ទំនុកចិត្ត |
■ ការត្រួតពិនិត្យការបង្ហាញផ្សេងទៀត។ 
| ឈ្មោះប៊ូតុង | មុខងារ |
| តម្រង | កំណត់ជួរនៃការបង្ហាញពពកចំណុច។ |
| ការតាមដានឡាស៊ែរ | បង្ហាញកាំរស្មីឡាស៊ែរនៃឯកតា lidar នេះ។ |
| ព័ត៌មានរដ្ឋ | បង្ហាញព័ត៌មានស្ថានភាពនៅជ្រុងបាតឆ្វេងនៃតំបន់បង្ហាញពពកចំណុច ដូចជាល្បឿនម៉ូតូ របៀបត្រឡប់ និងឈ្មោះ .PCAP file. |
| បោះចោល PCD | បោះចោលស៊ុមបច្ចុប្បន្នទៅក្នុង .pcd (Point Cloud Data) file និងបញ្ជាក់ file ទីតាំង។ |
| ផែនទីពណ៌ | កំណត់ពណ៌ចម្រុះនៃចំណុចបង្ហាញពពក។ |
| ទំហំចំណុច | កំណត់ទំហំបង្ហាញនៃចំណុចទិន្នន័យ។ |
| របៀបត្រឡប់ | ជ្រើសរើសការត្រឡប់មកវិញដែលត្រូវបង្ហាញ។ |
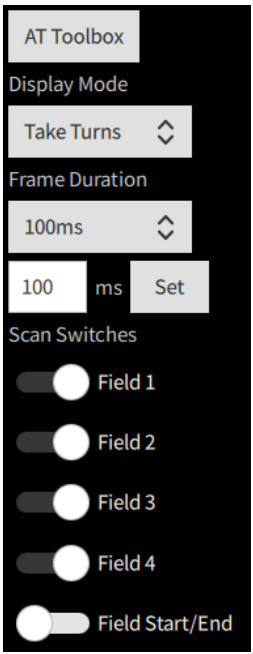
■ AT Family Toolbox
សម្រាប់ម៉ូដែលផលិតផលដែលជាកម្មសិទ្ធិរបស់គ្រួសារ AT ។ 
| របៀបបង្ហាញ | វេន (លំនាំដើម)៖ ការវាស់វែងពីផ្ទៃកញ្ចក់ 0/1/2 ត្រូវបានបញ្ចេញទៅស៊ុម 0/1/2 រៀងគ្នា។ ស៊ុមមិនត្រូវបានដេរទេ។ ការរួមបញ្ចូលគ្នា៖ ការវាស់វែងពីផ្ទៃកញ្ចក់ 0/1/2 គឺជាលទ្ធផលទៅស៊ុមមួយ។ នោះគឺស៊ុមចំនួនបីត្រូវបានដេរភ្ជាប់ជាមួយ។ ប្រពៃណី: ការវាស់វែងពីផ្ទៃកញ្ចក់ 0/1/2 គឺជាលទ្ធផលទៅស៊ុមមួយយោងទៅតាម មុំបំប្លែងកូដរបស់ពួកគេនៅក្នុង Point Cloud Data Packets។ គ្មានការកែមុំត្រូវបានអនុវត្តទេ។ |
| រយៈពេលស៊ុម | បង្អួចពេលវេលាសម្រាប់ការបង្ហាញពពកចំណុច នៅក្រោមរបៀបលេងតាមពេលវេលា (សូមមើលផ្នែកទី 4.2 ការគ្រប់គ្រងការលេង) ចំណុចទិន្នន័យទាំងអស់នៅក្នុងបង្អួចពេលវេលានេះនឹងត្រូវបានបង្ហាញ។ |
| ស្កែនកុងតាក់ | ដើម្បីបង្ហាញ ឬលាក់រង្វាស់ពីផ្ទៃកញ្ចក់នីមួយៗ។ វាល 1/2/3 ត្រូវគ្នាទៅនឹងផ្ទៃកញ្ចក់ 0/1/2 រៀងគ្នា។ វាលទី 4 មិនត្រូវបានប្រើទេ។ |
| វាលចាប់ផ្តើម/បញ្ចប់ | មិនទាន់គាំទ្រ |
ការដោះស្រាយបញ្ហា
ក្នុងករណីដែលនីតិវិធីខាងក្រោមមិនអាចដោះស្រាយបញ្ហាបានទេ សូមទាក់ទងផ្នែកជំនួយបច្ចេកទេស Hesai។
| រោគសញ្ញា | ចំណុចដែលត្រូវពិនិត្យ |
| ម៉ូទ័រ Lidar កំពុងដំណើរការ ប៉ុន្តែមិនមានទិន្នន័យលទ្ធផលណាមួយត្រូវបានទទួល ទាំងនៅលើ Wireshark ឬនៅលើ Pandar ទេ។View. | ផ្ទៀងផ្ទាត់ថា: · ខ្សែអ៊ីសឺរណិតត្រូវបានភ្ជាប់យ៉ាងត្រឹមត្រូវ (ដោយដោះដោត និងដោតម្តងទៀត); · IP ទិសដៅរបស់ Lidar ត្រូវបានកំណត់យ៉ាងត្រឹមត្រូវនៅលើទំព័រការកំណត់ web ការត្រួតពិនិត្យ; · FOV ផ្ដេកត្រូវបានកំណត់យ៉ាងត្រឹមត្រូវនៅលើទំព័រ Azimuth FOV នៃ web ការត្រួតពិនិត្យ; ·កំណែកម្មវិធីបង្កប់របស់ឧបករណ៍ចាប់សញ្ញាត្រូវបានបង្ហាញយ៉ាងត្រឹមត្រូវនៅលើទំព័រធ្វើឱ្យប្រសើរឡើងនៃ web ការត្រួតពិនិត្យ; · Lidar កំពុងបញ្ចេញពន្លឺឡាស៊ែរ។ វាអាចត្រូវបានត្រួតពិនិត្យដោយប្រើកាមេរ៉ាអ៊ីនហ្វ្រារ៉េដ កាតឧបករណ៍ចាប់សញ្ញាអ៊ីនហ្វ្រារ៉េដ ឬកាមេរ៉ាទូរសព្ទដោយគ្មានតម្រងអ៊ីនហ្វ្រារ៉េដ។ បើកថាមពលម្តងទៀតដើម្បីពិនិត្យមើលថាតើរោគសញ្ញានៅតែបន្តឬអត់។ |
| អាចទទួលទិន្នន័យនៅលើ Wireshark ប៉ុន្តែមិនមែននៅលើ Pandar ទេ។View. | ផ្ទៀងផ្ទាត់ថា: · ច្រកទិសដៅ Lidar ត្រូវបានកំណត់យ៉ាងត្រឹមត្រូវនៅលើទំព័រការកំណត់ web គ្រប់គ្រង · ជញ្ជាំងភ្លើងរបស់កុំព្យូទ័រត្រូវបានបិទ ឬ PandarView ត្រូវបានបន្ថែមទៅករណីលើកលែងជញ្ជាំងភ្លើង · ប្រសិនបើ VLAN ត្រូវបានបើក លេខសម្គាល់ VLAN របស់កុំព្យូទ័រគឺដូចគ្នាជាមួយ lidar's · Pandar ចុងក្រោយបំផុត។View កំណែ (សូមមើលទំព័រទាញយកផ្លូវការរបស់ Hesai website or contact Hesai technical support) ត្រូវបានដំឡើងនៅលើកុំព្យូទ័រ បើកថាមពលម្តងទៀតដើម្បីពិនិត្យមើលថាតើរោគសញ្ញានៅតែបន្តឬអត់។ |
ឧបសម្ព័ន្ធ I សេចក្តីជូនដំណឹងផ្លូវច្បាប់
រក្សាសិទ្ធិឆ្នាំ 2021 ដោយបច្ចេកវិទ្យា Hesai ។ រក្សារសិទ្ធគ្រប់យ៉ាង។ ការប្រើប្រាស់ ឬការផលិតឡើងវិញនៃសៀវភៅណែនាំនេះនៅក្នុងផ្នែក ឬទាំងស្រុងរបស់វាដោយគ្មានការអនុញ្ញាតពី Hesai ត្រូវបានហាមឃាត់។
បច្ចេកវិទ្យា Hesai មិនធ្វើតំណាង ឬការធានា ទាំងការបង្ហាញ ឬដោយបង្កប់ន័យ ទាក់ទងនឹងខ្លឹមសារនៅទីនេះ ហើយជាពិសេសបដិសេធការធានា ភាពអាចធ្វើជំនួញ ឬភាពសមស្របណាមួយសម្រាប់គោលបំណងជាក់លាក់ណាមួយ។ លើសពីនេះ Hesai Technology រក្សាសិទ្ធិក្នុងការកែប្រែការបោះពុម្ពនេះ និងធ្វើការផ្លាស់ប្តូរពីពេលមួយទៅពេលមួយនៅក្នុងខ្លឹមសារនេះ ដោយមិនមានកាតព្វកិច្ចជូនដំណឹងដល់បុគ្គលណាម្នាក់អំពីការកែប្រែ ឬការផ្លាស់ប្តូរបែបនេះ។
និមិត្តសញ្ញា HESAI និង HESAI គឺជាពាណិជ្ជសញ្ញាដែលបានចុះបញ្ជីរបស់ Hesai Technology ។ ពាណិជ្ជសញ្ញា សញ្ញាសេវាកម្ម និងឈ្មោះក្រុមហ៊ុនផ្សេងទៀតទាំងអស់នៅក្នុងសៀវភៅណែនាំនេះ ឬនៅលើផ្លូវការរបស់ Hesai webគេហទំព័រគឺជាទ្រព្យសម្បត្តិរបស់ម្ចាស់រៀងៗខ្លួន។
កម្មវិធីដែលបានរួមបញ្ចូលនៅក្នុងផលិតផលនេះមានការរក្សាសិទ្ធិដែលត្រូវបានចុះបញ្ជីនៅក្រោមបច្ចេកវិទ្យា Hesai ។ ភាគីទីបីមិនត្រូវបានអនុញ្ញាតទេ លើកលែងតែមានការអនុញ្ញាតច្បាស់លាស់ដោយអ្នកផ្តល់អាជ្ញាប័ណ្ណ ឬតម្រូវឱ្យច្បាស់លាស់ដោយច្បាប់ជាធរមាន ដើម្បីបង្រួបបង្រួម បញ្ច្រាសវិស្វករ រុះរើ កែប្រែ ជួល ជួល កម្ចី ចែកចាយ អាជ្ញាប័ណ្ណរង បង្កើតស្នាដៃចម្លងដោយផ្អែកលើផ្នែកទាំងមូល ឬផ្នែកណាមួយ នៃកម្មវិធី។
សៀវភៅណែនាំសេវាកម្មធានាផលិតផល Hesai មាននៅលើទំព័រគោលការណ៍ធានារបស់ Hesai ផ្លូវការ webគេហទំព័រ៖ https://www.hesaitech.com/en/legal/warranty
Hesai Technology Co., Ltd.
ទូរស័ព្ទ៖ +86 400 805 1233
Webគេហទំព័រ៖ www.hesaitech.com
អាស័យដ្ឋាន៖ អាគារ L2, Hongqiao World Centre, Shanghai, China
អ៊ីមែលអាជីវកម្ម៖ info@hesaitech.com
អ៊ីមែលសេវាកម្ម៖ service@hesaitech.com