![]() PandarView 2
PandarView 2
Point Cloud
Programska oprema za vizualizacijo
Uporabniški priročnik
PandarView Programska oprema za 2-točkovno vizualizacijo oblaka
www.hesaitech.com
 HESAI Wechat
HESAI Wechat
http://weixin.qq.com/r/Fzns9IXEl9jorcGX92wF
Različica dokumenta: PV2-en-230710
O tem priročniku
■ Uporaba tega priročnika
- Pred prvo uporabo obvezno preberite ta uporabniški priročnik in pri uporabi izdelka sledite tem navodilom. Neupoštevanje navodil lahko povzroči poškodbe izdelka, izgubo lastnine, telesne poškodbe in/ali kršitev garancije.
- Ta uporabniški priročnik ne vsebuje informacij o certifikatih izdelkov. Preverite certifikacijske oznake na spodnji plošči izdelka in preberite ustrezna certifikacijska opozorila.
- Če ta izdelek lidar vključite v svoje izdelke, morate zagotoviti ta uporabniški priročnik (ali sredstva za dostop do tega uporabniškega priročnika) predvidenim uporabnikom vaših izdelkov.
- Ta izdelek lidar je mišljen kot sestavni del končnega izdelka. V končnem izdelku se oceni v skladu z ustreznimi standardi.
■ Dostop do tega priročnika
Za pridobitev najnovejše različice:
- Obiščite uradno stran za prenos Hesai webspletno mesto: https://www.hesaitech.com/en/download
- Ali pa se obrnite na svojega prodajnega predstavnika pri Hesai
- Ali pa se obrnite na ekipo za tehnično podporo Hesai: service@hesaitech.com
■ Tehnična podpora
Če vaše vprašanje ni obravnavano v tem uporabniškem priročniku, nas kontaktirajte na:
service@hesaitech.com
www.hesaitech.com/en/support
https://github.com/HesaiTechnology (Prosimo, pustite svoja vprašanja pod ustreznimi projekti GitHub.)
■ Legende
![]() Opozorila: navodila, ki jih morate upoštevati, da zagotovite varno in pravilno uporabo izdelka.
Opozorila: navodila, ki jih morate upoštevati, da zagotovite varno in pravilno uporabo izdelka.
![]() Opombe: dodatne informacije, ki bi lahko bile koristne.
Opombe: dodatne informacije, ki bi lahko bile koristne.
Uvod
PandarView 2 je programska oprema druge generacije, ki beleži in prikazuje podatke o oblaku točk iz lidarjev Hesai, ki je na voljo v:
- 64-bitni Windows 10
- Ubuntu 16.04/18.04/20.04
![]() Če vaš računalnik uporablja grafično kartico AMD in deluje na Ubuntu-20.04, prenesite grafični gonilnik, ki podpira Ubuntu-20.04, z uradnega AMD-jevega webmesto. Za dodatna navodila se obrnite na tehnično podporo Hesai.
Če vaš računalnik uporablja grafično kartico AMD in deluje na Ubuntu-20.04, prenesite grafični gonilnik, ki podpira Ubuntu-20.04, z uradnega AMD-jevega webmesto. Za dodatna navodila se obrnite na tehnično podporo Hesai.
Ta priročnik opisuje PandarView 2.0.101. Podprti modeli izdelkov:
| Pandar40 Pandar40M Pandar40P Pandar64 |
Pandar128E3X | PandarQT QT128C2X |
PandarXT PandarXT-16 XT32M2X |
AT128E2X | FT120 |
Namestitev
Prenesite namestitev files Hesaijevega uradnika webspletno mesto ali kontaktirajte tehnično podporo: www.hesaitech.com/en/download
| Sistem | Namestitev Files |
| Windows | PandarView_Release_Win64_V2.x.xx.msi |
| Ubuntu | PandarView_Release_Ubuntu_V2.x.xx.bin |
![]() V Ubuntuju zaženite PandarView.sh v a file pot, ki vsebuje samo znake ASCII.
V Ubuntuju zaženite PandarView.sh v a file pot, ki vsebuje samo znake ASCII.
Programski vmesnik je razdeljen na štiri razdelke, kot je prikazano spodaj (podrobnosti so lahko drugačne).
»O programu« v menijski vrstici prikazuje različico programske opreme.
Preverite Live Point Cloud
Za prejemanje podatkov na vašem računalniku nastavite naslov IP računalnika na 192.168.1.100 in masko podomrežja na 255.255.255.0
| Za Ubuntu: | Za Windows: |
| Vnesite ta ukaz ifconfig v terminal: ~$ sudo ifconfig enp0s20f0u2 192.168.1.100 (zamenjajte enp0s20f0u2 z imenom lokalnih vrat Ethernet) |
Odprite Center za skupno rabo omrežja, kliknite »Ethernet« V polju »Ethernet Status« kliknite »Properties« Dvokliknite »Internet Protocol Version 4 (TCP/IPv4)« Konfigurirajte naslov IP na 192.168.1.100 in masko podomrežja na 255.255.255.0 |
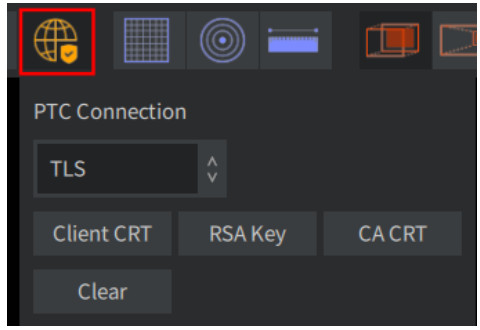
3.1 Konfiguracija kibernetske varnosti
Za modele izdelkov, ki podpirajo kibernetsko varnost, ![]() (Kibernetska varnost) se prikaže v orodni vrstici.
(Kibernetska varnost) se prikaže v orodni vrstici.
Uporabniki lahko izberejo enega od treh načinov:
■ Način TLS
V načinu TLS, PandarView 2 samodejno pridobi popravek lidarske enote files uporabo ukazov PTCS (PTC prek TLS).
| Varnostna stran od web nadzor | VKLOPITE glavno stikalo za kibernetsko varnost. |
| Izberite TLS za povezavo PTC. | |
| PandarView 2 | Izberite TLS za povezavo PTC. |
| Kliknite gumb »CA CRT« in določite file pot verige potrdil Hesai CA (Hesai_Ca_Chain.crt). |
■ Način mTLS
V načinu mTLS, PandarView 2 samodejno pridobi popravek lidarske enote filez uporabo ukazov PTCS.
| Varnostna stran od web nadzor | VKLOPITE glavno stikalo za kibernetsko varnost. |
| Izberite mTLS za povezavo PTC; nalaganje uporabniške verige potrdil CA. | |
| PandarView 2 | Izberite mTLS za povezavo PTC. |
| Kliknite gumb “CA CRT”; navedite file pot verige certifikatov Hesai CA (Hesai_Ca_Chain.crt). | |
| Kliknite gumb »Client CRT«; navedite file pot uporabniškega potrdila končne entitete. | |
| Kliknite gumb "RSA Key"; navedite file pot zasebnega ključa uporabnika (ki ustreza potrdilu končne entitete uporabnika). |
![]() Gumb »Počisti« odstrani navedeno file poti za CA CRT, odjemalski CRT in ključ RSA.
Gumb »Počisti« odstrani navedeno file poti za CA CRT, odjemalski CRT in ključ RSA.
■ Kibernetska varnost IZKLOPLJENA
V tem načinu, PandarView 2 samodejno pridobi popravek lidarske enote filez uporabo ukazov PTC.
| Varnostna stran od web nadzor | IZKLOPITE glavno stikalo za kibernetsko varnost |
| PandarView 2 | Za povezavo PTC izberite Non-TLS |
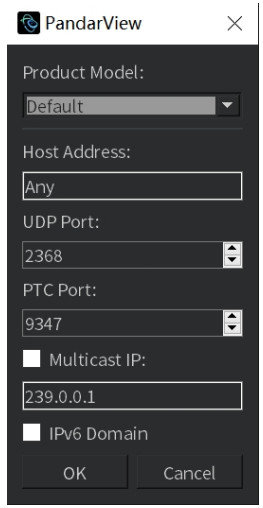
3.2 Prejemanje podatkov v živo
- Orodna vrstica:
 (Poslušaj Net)
(Poslušaj Net) - V pojavnem pogovornem oknu:
| Model izdelka | Privzeto |
| Naslov gostitelja | katera koli |
| Vrata UDP | Moralo bi biti enako kot »Lidar Destination Port« na strani z nastavitvami web nadzor. 2368 privzeto. |
| PTC vrata | Uporablja se za prenos PTC ukazov. 9347 privzeto. |
| Multicast IP | V načinu multicast potrdite potrditveno polje in določite skupino multicast |
| Domena IPv6 | Podprto samo pri določenih modelih izdelkov |
![]() Med prejemanjem podatkov v živo:
Med prejemanjem podatkov v živo:
- Uporabniki lahko izvozijo popravek kota file in korekcijo časa streljanja file, glejte razdelek 5.1 (Popravek oblaka točk).
 Gumb (Live Streaming) na konzoli omogoča pretakanje podatkov v živo z minimalno zakasnitvijo.
Gumb (Live Streaming) na konzoli omogoča pretakanje podatkov v živo z minimalno zakasnitvijo.
![]()
3.3 Snemanje podatkov v živo
Kliknite ![]() (Zapis) v konzoli in podajte a file imenik. Kliknite »Shrani«, da začnete snemati .pcap file.
(Zapis) v konzoli in podajte a file imenik. Kliknite »Shrani«, da začnete snemati .pcap file.
![]() Pri poimenovanju .pcap files v Ubuntuju vključite filepripona imena (.pcap).
Pri poimenovanju .pcap files v Ubuntuju vključite filepripona imena (.pcap).
Predvajaj Back Point Cloud
4.1 Odprite .PCAP File
- Kliknite
 (Odprto File) v orodni vrstici in izberite .pcap file v pojavnem oknu.
(Odprto File) v orodni vrstici in izberite .pcap file v pojavnem oknu.
Lahko pa povlecite .pcap file v PandarView 2. - Ko je nalaganje končano, se bo v konzoli prikazala sled oblaka točk.

![]() Opombe
Opombe
- Podpira samo format tcpdump pcap.
- Podprite samo eno sled oblaka točk hkrati: ko prejemate podatke v živo ali odpirate nov .pcap file, bo prejšnja skladba samodejno izbrisana.
- Velik .pcap filenalaganje lahko traja nekaj časa. Med nalaganjem kliknite (Pretakanje v živo) za predvajanje podatkov oblaka točk hkrati.
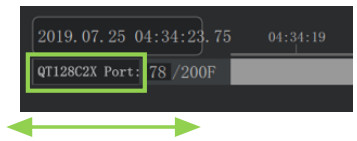
- Če model izdelka lidar in številka vrat nista prikazana v celoti, se pomaknite z miškinim kolescem.
4.2 Nadzor predvajanja 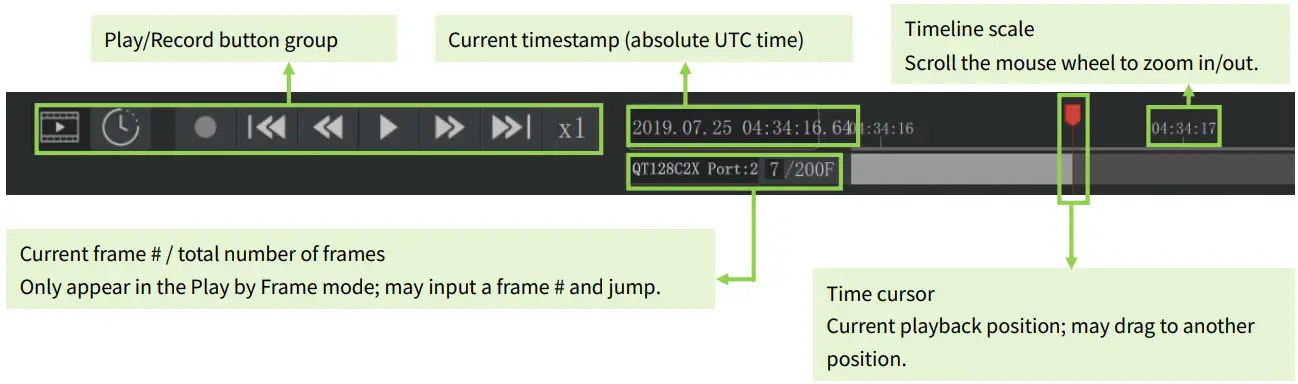
| Gumb | Opis |
 |
Levo: predvajanje po okvirju (privzeto) Desno: predvajanje po času |
 |
Skoči na začetek ali konec file |
 |
Levo: nastavite hitrost previjanja nazaj (1x, 1/2x, 1/4x, 1/8x, …, 1/64x) Desno: nastavite hitrost previjanja naprej (1x, 2x, 4x, 8x, …, 64x) |
 |
Levo: po nalaganju a file, kliknite za igranje. Desno: med igranjem a file, kliknite za premor. |
 |
Prikažite trenutno hitrost |
| Med nalaganjem a file, kliknite za predvajanje hkrati. (Ta gumb izgine, ko je nalaganje končano.) Ko prejemate podatke v živo, kliknite za pretakanje z minimalno zakasnitvijo. |
Popravek in konfiguracija
Pri preverjanju oblaka točk v živo ali predvajanju posnetega oblaka točk, popravek files in konfiguracijo files se lahko uporablja.
5.1 Popravek oblaka točk
| Popravek kota | Popravite podatke o azimutu in višini. Glejte razdelek 1.3 (Razporeditev kanalov) v uporabniškem priročniku lidar. |
| Popravek požara | Za nekatere modele izdelkov: popravite azimut podatkov oblaka točk glede na čas proženja vsakega kanala. |
| Popravek razdalje | Za nekatere modele izdelkov: popravite podatke o razdalji. |
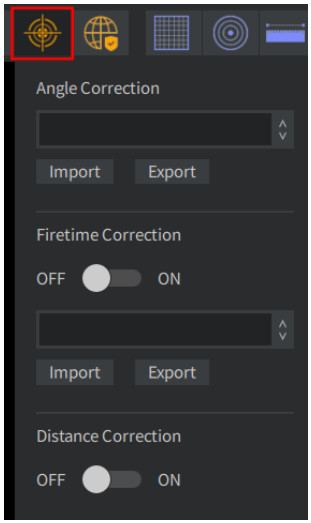
Kliknite ![]() (Popravek) v orodni vrstici:
(Popravek) v orodni vrstici:
| Vrsta popravka | Opis |
| Popravek kota | Pri preverjanju oblaka točk v živo: • PandarView 2 samodejno pridobi popravek file te lidarske enote. Pri predvajanju posnetega oblaka točk: • PandarView 2 samodejno naloži splošni popravek file za ta model izdelka. • Za najboljši prikaz kliknite »Uvozi« in izberite popravek file te lidarske enote. |
| Popravek požara | QT128C2X: • Pri preverjanju oblaka točk v živo: PandarView 2 samodejno pridobi popravek file te lidarske enote; preklopite na ON in začnite popravljati. • Pri predvajanju posnetega oblaka točk: PandarView 2 samodejno naloži splošni popravek file za ta model izdelka; preklopite na ON in začnite popravljati. Drugi modeli izdelkov: • Preklopite na VKLOP, kliknite »Uvozi« in izberite popravek file te lidarske enote. • Če popravek lidarske enote file ni na voljo lokalno, preklopite na VKLOP in izberite splošni popravek file za ta model izdelka v spustnem meniju. |
| Popravek razdalje | Preklopite na VKLOP. |
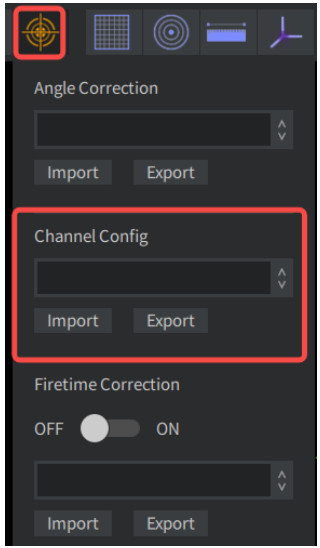
5.2 Konfiguracija kanala
Konfiguracija kanala file izbere podnabor izmed vseh razpoložljivih kanalov lidarja, definira število blokov v podatkovnem paketu oblaka točk in določi kanale, ki naj bodo shranjeni v posameznem bloku.
Na voljo samo za QT128C2X:
- Pri preverjanju oblaka točk v živo: PandarView 2 samodejno pridobi konfiguracijo kanala file te lidarske enote.
- Pri predvajanju posnetega oblaka točk: kliknite
 (Popravek) v orodni vrstici kliknite »Uvozi« v razdelku Konfiguracija kanala in izberite konfiguracijo kanala file te lidarske enote.
(Popravek) v orodni vrstici kliknite »Uvozi« v razdelku Konfiguracija kanala in izberite konfiguracijo kanala file te lidarske enote.
5.3 File Uvoz in izvoz
File uvoz
- Pri preverjanju oblaka točk v živo lahko gumb »Izvozi« uporabite za prenos popravka ali konfiguracije files te lidarske enote.
- Pri poimenovanju teh files v Ubuntuju, obvezno vključite filerazširitev imena (.dat za popravek kota files iz družine AT in .csv za druge).
File izvoz
- Uvoženi popravek ali konfiguracija files se dodajo na dno spustnega menija.
- Če jih ne potrebujete več files, jih lahko izbrišete z naslednje poti (velja po ponovnem zagonu PandarView 2): Dokumenti\PandarViewpodatkiFiles\csv
Druge funkcije
6.1 Bližnjice miške
| Povlecite z levim gumbom | Zavrtite oblak točk |
| Povlecite z desnim gumbom | Povečaj/pomanjšaj: povlecite levo za pomanjšanje in desno za povečavo |
| Pomikajte kolesce | Povečaj/pomanjšaj: pomikanje navzdol za pomanjšanje in navzgor za povečavo |
| Pritisnite kolesce in povlecite | Pan the view |
| Shift in povlecite z levim gumbom | Zavrtite oblak točk okoli viewing smer (smer od viewkažejo na izvor koordinat) |
| Shift in povlecite z desnim gumbom | Pan the view |
6.2 Sledi oblaka točk
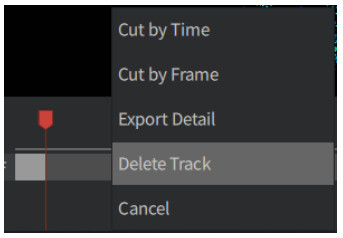
Desni klik na sled oblaka točk:
| Cut by Time | Določite začetni/končni časamps, izrežite trenutno skladbo in shranite v novo datoteko .pcap file. |
| Cut by Frame | Določite začetni/končni okvir, izrežite trenutno skladbo in shranite v nov .pcap file. |
| Izvoz podrobnosti | Ko izberete območje točk (glejte Razdelek 6.3 Orodna vrstica – Izbira točk in podatkovna tabela), določite začetni/končni okvir in izvozite ustrezne podatke oblaka točk v .csv files. · Uporaba · Pri poimenovanju teh files v Ubuntuju, obvezno vključite filepripona imena (.csv). |
| Izbriši skladbo | Izbrišite trenutno skladbo. |
| Prekliči | Zaprite meni z desnim klikom. |
6.3 Orodna vrstica
Če je PandarView 2 okno je preozko za prikaz orodne vrstice v celoti, pomaknite kolesce miške do view vsi gumbi.
■ Koordinatne mreže, koordinatni sistem in merjenje razdalje 
| Ime gumba | funkcija |
| kartezijanski | Pokaži/skrij mreže z razmikom 30 m |
| Polar | Pokaži/skrij enako oddaljene kroge z razmikom 10 m |
| Ravnilo | Z levim gumbom povlecite za merjenje razdalje med dvema točkama |
| Koordinate | Prikaži pravokotni koordinatni sistem |
■ Načini projekcije

| Ime gumba | funkcija |
| Ortografska projekcija | – |
| Perspektivna projekcija | – |
■ Točka View in predenje
| Ime gumba | funkcija |
| Spredaj/Zadaj/Levo/Desno/Zgoraj | – |
| Spin | Zavrtite viewing smer (smer od viewkažejo na izhodišče koordinat) okoli osi Z |
■ Izbira kanala 
Kliknite ![]() (Kanali) do view ali spremenite trenutno prikazane kanale.
(Kanali) do view ali spremenite trenutno prikazane kanale.
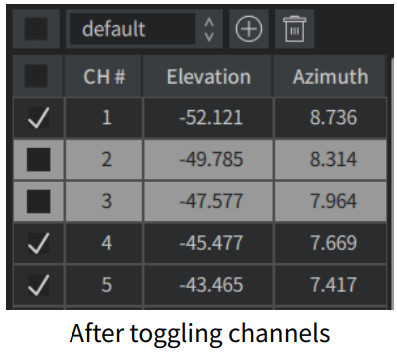
Prikaži ali skrij kanale
- Potrdite/počistite polja na levi strani vsakega kanala, da prikažete/skrijete njegove podatke oblaka točk.
- Privzeto so prikazani vsi kanali.
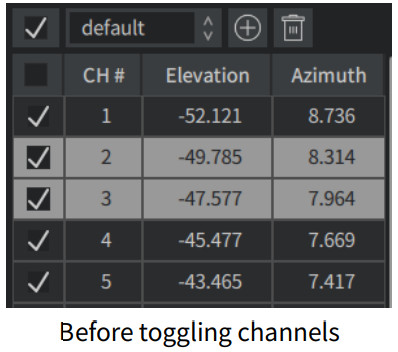
Izberite in preklapljajte kanale
- Kliknite na kanal (razen območja njegovega potrditvenega polja), da izberete in označite ta kanal.
- Med klikanjem držite tipko Shift, da izberete več sosednjih kanalov.
- Med klikanjem držite tipko Ctrl, da izberete več ločenih kanalov.
- Kliknite
 (Preklopi izbrane kanale) v zgornjem levem kotu, da preklopite izbrane kanale med označenimi in neoznačenimi.
(Preklopi izbrane kanale) v zgornjem levem kotu, da preklopite izbrane kanale med označenimi in neoznačenimi.
Shranite skupine kanalov
- Kliknite
 da shranite označene kanale kot konfiguracijo in jo poimenujete.
da shranite označene kanale kot konfiguracijo in jo poimenujete. - Prej shranjene konfiguracije obstajajo po ponovnem zagonu PandarjaView 2 in ga lahko izberete v
 spustni meni.
spustni meni. - Če želite izbrisati trenutno izbrano konfiguracijo, kliknite
 .
.
■ Izbira točk in podatkovna tabela
Kliknite ![]() (Izberi) in povlecite miško, da označite območje točk.
(Izberi) in povlecite miško, da označite območje točk.
Kliknite ![]() (razpredelnica) za view podatke označenih točk, kot je prikazano spodaj.
(razpredelnica) za view podatke označenih točk, kot je prikazano spodaj. 
Ko večkrat dvokliknete naslov polja, se ena za drugo izvedejo naslednja dejanja:
- Prilagodite širino stolpca imenu polja
(Druga možnost je, da kazalec miške postavite med dva naslova, tako da kazalec postane puščica levo-desno; povlecite miško, da prilagodite širino stolpca.) - Razvrsti to polje po naraščajočem vrstnem redu. Puščica navzgor
 se prikaže na desni.
se prikaže na desni. - Razvrsti to polje po padajočem vrstnem redu. Puščica navzdol
 se prikaže na desni.
se prikaže na desni. - Prekliči razvrščanje.
Skupina gumbov v zgornjem levem kotu:

| Izberite Vse | Kliknite za prikaz podatkov vseh točk v tem okvirju. S ponovnim klikom se prikažejo samo podatki izbranih točk. |
| Informacije o izvoznih točkah | Izvozite trenutno podatkovno tabelo v .csv file. |
| Shrani vrstni red stolpcev | Shranite trenutni vrstni red polj. Ta nastavitev ostane v veljavi po ponovnem zagonu PandarjaView 2. |
Polja v podatkovni tabeli so opredeljena spodaj:
| Ch | Kanal # |
| AziCorr | Azimut popravljen s popravkom kota file |
| Razd | Razdalja |
| Rfl | Odsevnost |
| Azi | Azimut (trenutni referenčni kot rotorja) |
| Ele | Nadmorska višina |
| t | Časovni časamp |
| Polje | Za modele izdelkov družine AT: zrcalna površina, na kateri je opravljena ta meritev. Polja 1/2/3 ustrezajo zrcalnim površinam 0/1/2. |
| AziState | Stanje azimuta Uporablja se za izračun časovnega zamika proženja vsakega kanala; samo za določene modele lidar. |
| zaupanje | Zaupanje |
■ Drugi kontrolniki zaslona 
| Ime gumba | funkcija |
| Filter | Določite obseg prikaza oblaka točk. |
| Lasersko sledenje | Pokažite laserske žarke te lidarske enote. |
| Informacije o državi | Prikaz informacij o stanju v spodnjem levem kotu območja prikaza oblaka točk, kot so hitrost motorja, način vračanja in ime .PCAP file. |
| Odloži PCD | Prenesite trenutni okvir v .pcd (podatki v oblaku točk) file in določite file lokacijo. |
| Barvni zemljevid | Nastavite barvno shemo prikaza oblaka točk. |
| Velikost točke | Nastavite velikost prikaza podatkovnih točk. |
| Način vrnitve | Izberite vračila za prikaz. |
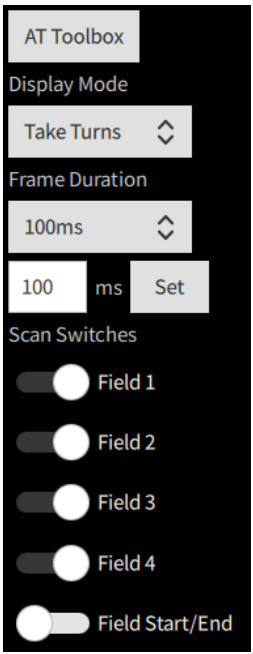
■ AT Family Toolbox
Za modele izdelkov, ki pripadajo družini AT. 
| Način prikaza | Izmenjuj se (privzeto): meritve z zrcalnih površin 0/1/2 se prikažejo v okvirjih 0/1/2. Okvirji niso šivani. Kombinacija: meritve z zrcalnih površin 0/1/2 se izpišejo v en okvir. To pomeni, da so trije okvirji zašiti kot eden. Tradicija: meritve z zrcalnih površin 0/1/2 se izpišejo v en okvir glede na njihovih kotov kodirnika v podatkovnih paketih Point Cloud. Korekcija kota se ne izvede. |
| Trajanje okvirja | Časovno okno za prikaz oblaka točk V načinu predvajanja po času (glejte razdelek 4.2 Nadzor predvajanja) bodo prikazane vse podatkovne točke v tem časovnem oknu. |
| Scan Stikala | Za prikaz ali skrivanje meritev vsake zrcalne površine. Polja 1/2/3 ustrezajo zrcalnim površinam 0/1/2. Polje 4 se ne uporablja. |
| Začetek/konec polja | Še ni podprto |
Odpravljanje težav
Če naslednji postopki ne morejo rešiti težave, se obrnite na tehnično podporo Hesai.
| simptomi | Točke za preverjanje |
| Motor Lidar deluje, vendar ni prejetih nobenih izhodnih podatkov, niti na Wiresharku niti na PandarjuView. | Preverite, da: · je ethernetni kabel pravilno priključen (z odklopom in ponovnim priklopom); · Lidarjev ciljni IP je pravilno nastavljen na strani z nastavitvami web nadzor; · vodoravno vidno polje je pravilno nastavljeno na strani Azimutnega vidnega polja web nadzor; · različica vdelane programske opreme senzorja je pravilno prikazana na strani za nadgradnjo web nadzor; · Lidar oddaja lasersko svetlobo. To lahko preverite z infrardečo kamero, infrardečo senzorsko kartico ali telefonsko kamero brez infrardečega filtra. Znova vklopite, da preverite, ali simptom še vedno obstaja. |
| Lahko prejema podatke na Wiresharku, ne pa na PandarjuView. | Preverite, da: · so ciljna vrata Lidar pravilno nastavljena na strani z nastavitvami web nadzor · Požarni zid osebnega računalnika je onemogočen ali tisti PandarView je dodan med izjeme požarnega zidu · če je VLAN omogočen, je VLAN ID osebnega računalnika enak ID-ju lidarja · najnovejši PandarView različica (glejte stran za prenos Hesaijeve uradne webali se obrnite na tehnično podporo Hesai) nameščen v računalniku Znova vklopite, da preverite, ali simptom še vedno obstaja. |
Dodatek I Pravno obvestilo
Avtorska pravica 2021 Hesai Technology. Vse pravice pridržane. Uporaba ali reprodukcija tega priročnika v delih ali v celoti brez dovoljenja družbe Hesai je prepovedana.
Hesai Technology ne daje nobenih izjav ali jamstev, bodisi izrecnih bodisi implicitnih, v zvezi z vsebino tega dokumenta in izrecno zavrača kakršna koli jamstva, primernost za prodajo ali primernost za kateri koli poseben namen. Poleg tega si Hesai Technology pridržuje pravico do popravka te publikacije in občasnih sprememb vsebine brez obveznosti obveščanja katere koli osebe o takem pregledu ali spremembah.
HESAI in logotip HESAI sta registrirani blagovni znamki Hesai Technology. Vse druge blagovne znamke, storitvene znamke in imena podjetij v tem priročniku ali na uradni strani podjetja Hesai webso last njihovih lastnikov.
Programska oprema, vključena v ta izdelek, vsebuje avtorske pravice, ki so registrirane pri Hesai Technology. Kateri koli tretji osebi ni dovoljeno, razen če to izrecno dovoli dajalec licence ali izrecno zahteva veljavna zakonodaja, dekompilirati, izvajati obratni inženiring, razstavljati, spreminjati, dajati v najem, zakup, posojati, distribuirati, podlicencirati, ustvarjati izpeljana dela, ki temeljijo na celoti ali katerem koli delu. programske opreme.
Priročnik za garancijski servis izdelkov Hesai je na strani z garancijsko politiko Hesaijevega uradnika webspletno mesto: https://www.hesaitech.com/en/legal/warranty
Hesai Technology Co., Ltd.
Telefon: +86 400 805 1233
Webspletno mesto: www.hesaitech.com
Naslov: Stavba L2, svetovni center Hongqiao, Šanghaj, Kitajska
Poslovni e-poštni naslov: info@hesaitech.com
E-pošta storitve: service@hesaitech.com