![]() PandarView 2
PandarView 2
Oblak tačaka
Softver za vizualizaciju
Uputstvo za upotrebu
PandarView Softver za vizualizaciju oblaka u 2 tačke
www.hesaitech.com
 HESAI Wechat
HESAI Wechat
http://weixin.qq.com/r/Fzns9IXEl9jorcGX92wF
Verzija dokumenta: PV2-en-230710
O ovom priručniku
■ Korištenje ovog priručnika
- Obavezno pročitajte ovaj korisnički priručnik prije prve upotrebe i slijedite ovdje navedena uputstva kada koristite proizvod. Nepoštivanje uputstava može dovesti do oštećenja proizvoda, gubitka imovine, ličnih ozljeda i/ili kršenja garancije.
- Ovaj korisnički priručnik ne sadrži informacije o certifikatima proizvoda. Molimo provjerite certifikacijske oznake na donjoj ploči proizvoda i pročitajte odgovarajuća upozorenja o certifikaciji.
- Ako ugradite ovaj lidar proizvod u svoje proizvode, od vas se traži da dostavite ovaj korisnički priručnik (ili sredstva za pristup ovom korisničkom priručniku) namijenjenim korisnicima vaših proizvoda
- Ovaj lidar proizvod je zamišljen kao komponenta krajnjeg proizvoda. U krajnjem proizvodu mora biti ocijenjen prema relevantnim standardima.
■ Pristup ovom priručniku
Da biste dobili najnoviju verziju:
- Posjetite stranicu za preuzimanje Hesaijevog službenika webstranica: https://www.hesaitech.com/en/download
- Ili kontaktirajte svog prodajnog predstavnika u Hesai
- Ili kontaktirajte Hesai tim za tehničku podršku: service@hesaitech.com
■ Tehnička podrška
Ako vaše pitanje nije adresirano u ovom korisničkom priručniku, kontaktirajte nas na:
service@hesaitech.com
www.hesaitech.com/en/support
https://github.com/HesaiTechnology (Molimo ostavite svoja pitanja pod odgovarajućim GitHub projektima.)
■ Legende
![]() Upozorenja: uputstva koja se moraju pridržavati kako bi se osigurala sigurna i pravilna upotreba proizvoda.
Upozorenja: uputstva koja se moraju pridržavati kako bi se osigurala sigurna i pravilna upotreba proizvoda.
![]() napomene: dodatne informacije koje mogu biti od pomoći.
napomene: dodatne informacije koje mogu biti od pomoći.
Uvod
PandarView 2 je softver druge generacije koji snima i prikazuje podatke oblaka tačaka sa Hesai lidara, dostupan u:
- 64-bitni Windows 10
- Ubuntu 16.04/18.04/20.04
![]() Ako vaš računar koristi AMD grafičku karticu i radi na Ubuntu-20.04, preuzmite grafički drajver koji podržava Ubuntu-20.04 sa AMD-ovog zvaničnog website. Za dodatna uputstva kontaktirajte Hesai tehničku podršku.
Ako vaš računar koristi AMD grafičku karticu i radi na Ubuntu-20.04, preuzmite grafički drajver koji podržava Ubuntu-20.04 sa AMD-ovog zvaničnog website. Za dodatna uputstva kontaktirajte Hesai tehničku podršku.
Ovaj priručnik opisuje PandarView 2.0.101. Podržani modeli proizvoda:
| Pandar40 Pandar40M Pandar40P Pandar64 |
Pandar128E3X | PandarQT QT128C2X |
PandarXT PandarXT-16 XT32M2X |
AT128E2X | FT120 |
Instalacija
Preuzmite instalaciju fileje od Hesaijevog zvaničnika websajt, ili kontaktirajte tehničku podršku: www.hesaitech.com/en/download
| Sistem | Instalacija Files |
| Windows | PandarView_Release_Win64_V2.x.xx.msi |
| Ubuntu | PandarView_Release_Ubuntu_V2.x.xx.bin |
![]() U Ubuntu-u pokrenite PandarView.sh in a file putanja koja sadrži samo ASCII znakove.
U Ubuntu-u pokrenite PandarView.sh in a file putanja koja sadrži samo ASCII znakove.
Softverski interfejs je podeljen u četiri sekcije, kao što je prikazano u nastavku (detalji mogu biti različiti).
„O“ u traci menija prikazuje verziju softvera.
Provjerite Live Point Cloud
Da biste primili podatke na svoj PC, postavite IP adresu računara na 192.168.1.100 i masku podmreže na 255.255.255.0
| Za Ubuntu: | Za Windows: |
| Unesite ovu ifconfig komandu u terminalu: ~$ sudo ifconfig enp0s20f0u2 192.168.1.100 (zamijenite enp0s20f0u2 s imenom lokalnog Ethernet porta) |
Otvorite Centar za dijeljenje mreže, kliknite na “Ethernet” U polju "Ethernet Status" kliknite na "Svojstva" Dvaput kliknite na “Internet Protocol Version 4 (TCP/IPv4)” Konfigurišite IP adresu na 192.168.1.100 i masku podmreže na 255.255.255.0 |
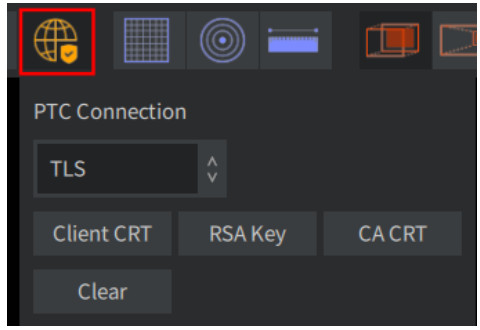
3.1 Konfiguracija kibernetičke sigurnosti
Za modele proizvoda koji podržavaju kibernetičku sigurnost, ![]() (Cybersecurity) će se pojaviti na traci sa alatkama.
(Cybersecurity) će se pojaviti na traci sa alatkama.
Korisnici mogu odabrati jedan od tri načina rada:
■ TLS način rada
U TLS modu, PandarView 2 automatski preuzima korekciju lidarske jedinice files korištenjem PTCS (PTC preko TLS) komandi.
| Sigurnosna stranica od web kontrolu | Uključite glavni prekidač Cyber Security. |
| Odaberite TLS za PTC vezu. | |
| PandarView 2 | Odaberite TLS za PTC vezu. |
| Kliknite na dugme “CA CRT” i navedite file putanja Hesaijevog CA lanca certifikata (Hesai_Ca_Chain.crt). |
■ mTLS način rada
U mTLS modu, PandarView 2 automatski preuzima korekciju lidarske jedinice files korištenjem PTCS komandi.
| Sigurnosna stranica od web kontrolu | Uključite glavni prekidač Cyber Security. |
| Odaberite mTLS za PTC vezu; prenijeti korisnički CA lanac certifikata. | |
| PandarView 2 | Odaberite mTLS za PTC vezu. |
| Kliknite na dugme “CA CRT”; specificirati file putanja Hesai CA lanca certifikata (Hesai_Ca_Chain.crt). | |
| Kliknite na dugme “Client CRT”; specificirati file putanja certifikata krajnjeg entiteta korisnika. | |
| Kliknite na dugme “RSA Key”; specificirati file putanja privatnog ključa korisnika (koja odgovara certifikatu krajnjeg entiteta korisnika). |
![]() Dugme “Obriši” uklanja navedeno file staze za CA CRT, Client CRT i RSA ključ.
Dugme “Obriši” uklanja navedeno file staze za CA CRT, Client CRT i RSA ključ.
■ Cybersecurity OFF
U ovom modu, PandarView 2 automatski preuzima korekciju lidarske jedinice files korištenjem PTC komandi.
| Sigurnosna stranica od web kontrolu | Isključite glavni prekidač Cyber Security |
| PandarView 2 | Odaberite Non-TLS za PTC vezu |
3.2 Primanje podataka uživo
- Alatna traka:
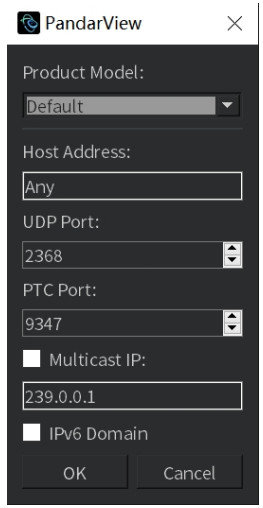
 (Slušaj Net)
(Slušaj Net) - U iskačućem dijaloškom okviru:
| Model proizvoda | Default |
| Adresa domaćina | Bilo koji |
| UDP port | Trebalo bi biti isto kao i “Lidar Destination Port” na stranici postavki web kontrolu. 2368 po defaultu. |
| PTC port | Koristi se za prijenos PTC komandi. 9347 po defaultu. |
| Multicast IP | U višestrukom načinu rada, potvrdite izbor u polju za potvrdu i navedite višestruku grupu |
| IPv6 domena | Podržano samo na određenim modelima proizvoda |
![]() Dok primate podatke uživo:
Dok primate podatke uživo:
- Korisnici mogu izvesti korekciju ugla file i korekciju vremena paljbe file, pogledajte odjeljak 5.1 (Korekcija oblaka tačaka).
 (Live Streaming) dugme na konzoli omogućava striming podataka uživo sa minimalnim kašnjenjem.
(Live Streaming) dugme na konzoli omogućava striming podataka uživo sa minimalnim kašnjenjem.
![]()
3.3 Snimanje podataka uživo
Kliknite ![]() (Snimi) u konzoli i navedite a file imenik. Kliknite na “Sačuvaj” da započnete snimanje .pcap file.
(Snimi) u konzoli i navedite a file imenik. Kliknite na “Sačuvaj” da započnete snimanje .pcap file.
![]() Prilikom imenovanja .pcap files u Ubuntu, uključite fileekstenzija imena (.pcap).
Prilikom imenovanja .pcap files u Ubuntu, uključite fileekstenzija imena (.pcap).
Igrajte Back Point Cloud
4.1 Otvorite .PCAP File
- Kliknite
 (Otvoreno File) na traci sa alatkama i izaberite .pcap file u iskačućem prozoru.
(Otvoreno File) na traci sa alatkama i izaberite .pcap file u iskačućem prozoru.
Alternativno, prevucite .pcap file u PandarView 2. - Kada se učitavanje završi, na konzoli će se pojaviti trag oblaka tačaka.

![]() Bilješke
Bilješke
- Podržava samo tcpdump pcap format.
- Podržavajte samo jednu po jednu stazu u oblaku: kada primate podatke uživo ili otvarate novi .pcap file, prethodna numera će se automatski izbrisati.
- Veliki .pcap files može potrajati neko vrijeme da se učita. Prilikom učitavanja kliknite (Uživo prijenos) za reprodukciju podataka oblaka tačaka odjednom.
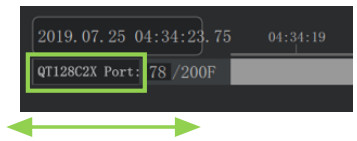
- Ako model lidar proizvoda i broj porta nisu prikazani u potpunosti, pomičite kotačić miša.
4.2 Kontrola reprodukcije 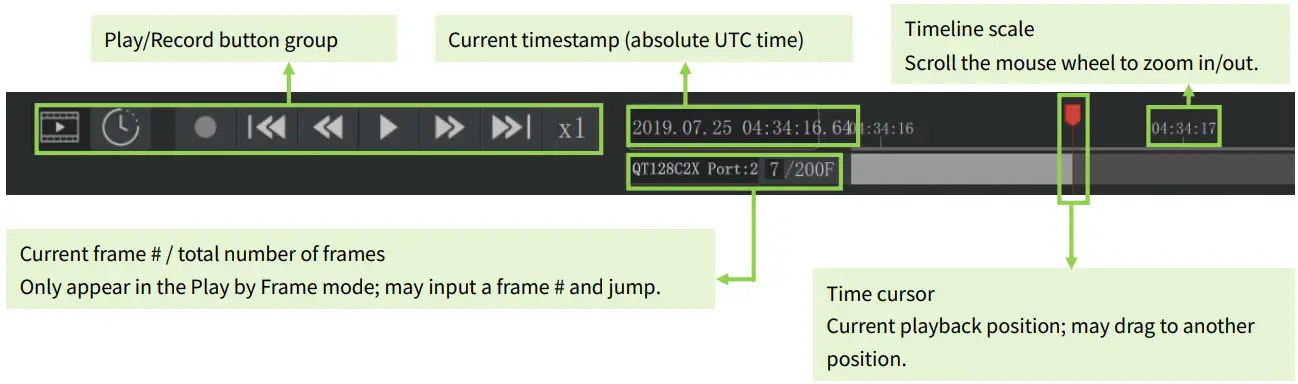
| Dugme | Opis |
 |
Lijevo: reprodukcija po kadru (podrazumevano) Desno: reprodukcija po vremenu |
 |
Skoči na početak ili kraj file |
 |
Lijevo: podesite brzinu premotavanja (1x, 1/2x, 1/4x, 1/8x, …, 1/64x) Desno: podesite brzinu premotavanja (1x, 2x, 4x, 8x, …, 64x) |
 |
Lijevo: nakon punjenja a file, kliknite za reprodukciju. Desno: dok igrate a file, kliknite da pauzirate. |
 |
Prikaz trenutne brzine |
| Prilikom učitavanja a file, kliknite za reprodukciju odjednom. (Ovo dugme nestaje kada je učitavanje završeno.) Kada primate podatke uživo, kliknite za stream sa minimalnim kašnjenjem. |
Ispravka i konfiguracija
Prilikom provjere oblaka tačaka uživo ili reprodukcije snimljenog oblaka tačaka, ispravka files i konfiguraciju files se mogu koristiti.
5.1 Korekcija oblaka tačaka
| Korekcija ugla | Ispravite podatke o azimutu i elevaciji. Pogledajte odjeljak 1.3 (Distribucija kanala) u korisničkom priručniku lidara. |
| Firetime Correction | Za određene modele proizvoda: ispravite azimut podataka oblaka tačaka u skladu sa vremenom aktiviranja svakog kanala. |
| Korekcija udaljenosti | Za određene modele proizvoda: ispravite podatke o udaljenosti. |
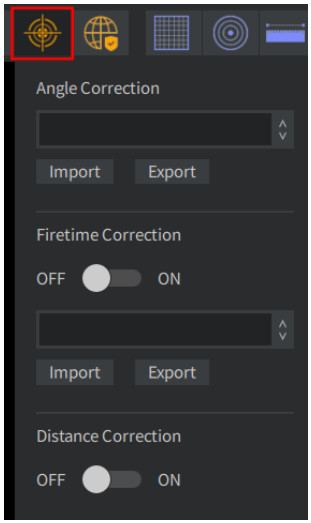
Kliknite ![]() (Ispravka) na traci sa alatkama:
(Ispravka) na traci sa alatkama:
| Vrsta korekcije | Opis |
| Korekcija ugla | Prilikom provjere oblaka tačaka uživo: • PandarView 2 automatski preuzima ispravku file ove lidarske jedinice. Prilikom reprodukcije snimljenog oblaka tačaka: • PandarView 2 automatski učitava opštu ispravku file za ovaj model proizvoda. • Za najbolji prikaz, kliknite na “Import” i odaberite ispravku file ove lidarske jedinice. |
| Firetime Correction | QT128C2X: • Prilikom provjere oblaka tačaka uživo: PandarView 2 automatski preuzima ispravku file ove lidarske jedinice; prebacite na ON i započnite korekciju. • Prilikom reprodukcije snimljenog oblaka tačaka: PandarView 2 automatski učitava opštu ispravku file za ovaj model proizvoda; prebacite na ON i započnite korekciju. Ostali modeli proizvoda: • Prebacite na ON, kliknite na “Uvezi” i odaberite ispravku file ove lidarske jedinice. • Ako je korekcija lidarske jedinice file nije dostupno lokalno, prebacite na UKLJUČENO i odaberite opću korekciju file za ovaj model proizvoda u padajućem izborniku. |
| Korekcija udaljenosti | Prebacite na UKLJUČENO. |
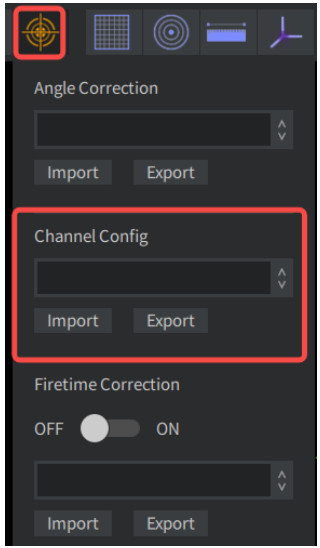
5.2 Konfiguracija kanala
Konfiguracija kanala file bira podskup od svih dostupnih kanala lidara, definira broj blokova u paketu podataka oblaka tačaka i specificira kanale koji će biti pohranjeni u svakom bloku.
Dostupno samo za QT128C2X:
- Prilikom provjere oblaka tačaka uživo: PandarView 2 automatski preuzima konfiguraciju kanala file ove lidarske jedinice.
- Prilikom reprodukcije snimljenog oblaka tačaka: kliknite
 (Ispravka) na traci sa alatkama, kliknite na “Import” u odjeljku Channel Config i odaberite konfiguraciju kanala file ove lidarske jedinice.
(Ispravka) na traci sa alatkama, kliknite na “Import” u odjeljku Channel Config i odaberite konfiguraciju kanala file ove lidarske jedinice.
5.3 File Uvoz i izvoz
File uvoz
- Prilikom provjere oblaka tačaka uživo, dugme „Izvezi“ se može koristiti za preuzimanje ispravke ili konfiguracije files ove lidarske jedinice.
- Prilikom imenovanja ovih files u Ubuntu, obavezno uključite fileproširenje imena (.dat za korekciju ugla files AT porodice, i .csv za ostale).
File izvoz
- Uvezena ispravka ili konfiguracija files se dodaju na dno padajućeg menija.
- Ako vam više ne trebaju files, možete ih izbrisati sa sljedeće staze (na snazi nakon ponovnog pokretanja PandaraView 2): Dokumenti\PandarViewPodaciFiles\csv
Ostale karakteristike
6.1 Prečice miša
| Povucite lijevo dugme | Rotirajte oblak tačaka |
| Povucite desno dugme | Uvećavanje/umanjivanje: povlačenje lijevo za umanjivanje i desno za uvećanje |
| Pomičite točak | Uvećavanje/umanjivanje: pomicanje prema dolje za smanjenje i gore za uvećanje |
| Pritisnite kotačić i povucite | Pan the view |
| Shift i lijevo dugme Povucite | Okrenite oblak tačaka oko viewsmjeru (smjer od viewpokažite na ishodište koordinata) |
| Shift i desno dugme Povucite | Pan the view |
6.2 Tragovi oblaka tačaka
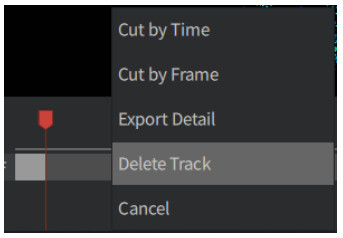
Desni klik na stazu oblaka tačaka:
| Cut by Time | Navedite vrijeme početka/završetkaamps, isecite trenutnu stazu i sačuvajte u novom .pcap file. |
| Cut by Frame | Odredite početne/završne okvire, izrežite trenutnu stazu i spremite u novi .pcap file. |
| Izvoz detalja | Nakon odabira područja tačaka (pogledajte odjeljak 6.3 Traka s alatima – Izbor tačaka i tabela podataka), navedite početne/krajnje okvire i izvezite odgovarajuće podatke oblaka tačaka u .csv files. · Koristite · Prilikom imenovanja ovih files u Ubuntu, obavezno uključite fileekstenzija imena (.csv). |
| Delete Track | Izbrišite trenutnu numeru. |
| Otkaži | Zatvorite meni desnim klikom. |
6.3 Traka sa alatkama
Ako je PandarView 2 prozor je preuzak da bi se traka sa alatkama prikazala u potpunosti, pomerite točkić miša do view sva dugmad.
■ Koordinatne mreže, koordinatni sistem i mjerenje udaljenosti 
| Ime dugmeta | Funkcija |
| Kartezijanski | Prikaži/sakrij mreže sa razmakom od 30 m |
| Polar | Prikaži/sakrij jednako udaljene krugove sa razmakom od 10 m |
| Vladar | Povucite lijevo dugme za mjerenje udaljenosti između dvije tačke |
| Koordinate | Prikažite pravougaoni koordinatni sistem |
■ Režimi projekcije

| Ime dugmeta | Funkcija |
| Orthographic Projection | – |
| Perspective Projection | – |
■ Tačka View and Spinning
| Ime dugmeta | Funkcija |
| Prednja/straga/lijevo/desno/gore | – |
| Spin | Spin the viewsmjeru (smjer od viewpokažite na ishodište koordinata) oko Z-ose |
■ Odabir kanala 
Kliknite ![]() (kanali) do view ili promijenite trenutno prikazane kanale.
(kanali) do view ili promijenite trenutno prikazane kanale.
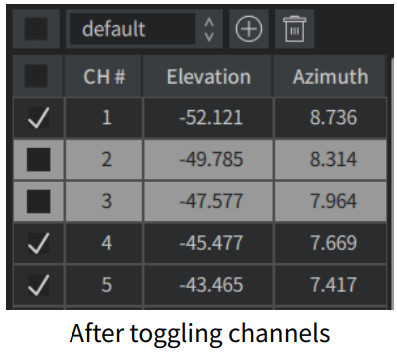
Prikažite ili sakrijte kanale
- Označite/uklonite kvačicu iz okvira na lijevoj strani svakog kanala da biste prikazali/sakrili podatke o oblaku tačaka.
- Podrazumevano, svi kanali su prikazani.
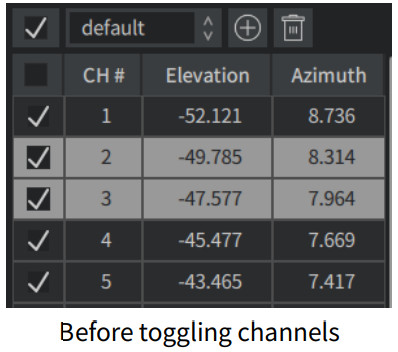
Odaberite i prebacite kanale
- Kliknite na kanal (isključujući područje njegovog polja za potvrdu) da odaberete i označite ovaj kanal.
- Držite Shift dok kliknete da odaberete više susjednih kanala.
- Držite pritisnut Ctrl dok klikate da odaberete više zasebnih kanala.
- Kliknite
 (Prebaci odabrane kanale) u gornjem lijevom kutu za prebacivanje odabranih kanala između označenih i nepotvrđenih.
(Prebaci odabrane kanale) u gornjem lijevom kutu za prebacivanje odabranih kanala između označenih i nepotvrđenih.
Sačuvajte grupe kanala
- Kliknite
 da sačuvate označene kanale kao konfiguraciju i date im naziv.
da sačuvate označene kanale kao konfiguraciju i date im naziv. - Prethodno sačuvane konfiguracije postoje nakon ponovnog pokretanja PandaraView 2 i može se odabrati u
 padajući meni.
padajući meni. - Za brisanje trenutno odabrane konfiguracije kliknite
 .
.
■ Izbor tačaka i tabela podataka
Kliknite ![]() (Odaberite) i prevucite mišem da označite područje tačaka.
(Odaberite) i prevucite mišem da označite područje tačaka.
Kliknite ![]() (Spread Sheet) do view podatke označenih tačaka, kao što je prikazano u nastavku.
(Spread Sheet) do view podatke označenih tačaka, kao što je prikazano u nastavku. 
Kada dvaput kliknete na naslov polja više puta, sljedeće radnje se izvode jedna po jedna:
- Prilagodite širinu kolone imenu polja
(Alternativno, postavite pokazivač miša između dva naslova tako da kursor postane strelica lijevo-desno; povucite miša da biste podesili širinu kolone.) - Sortirajte ovo polje uzlaznim redoslijedom. Strelica gore
 će se pojaviti na desnoj strani.
će se pojaviti na desnoj strani. - Sortirajte ovo polje po opadajućem redoslijedu. Strelica nadole
 će se pojaviti na desnoj strani.
će se pojaviti na desnoj strani. - Otkažite sortiranje.
Grupa dugmadi u gornjem lijevom uglu:

| Odaberite Sve | Kliknite da biste prikazali podatke svih tačaka u ovom okviru. Kliknite ponovo da prikažete samo podatke odabranih tačaka. |
| Podaci o izvoznim tačkama | Izvezite trenutnu tablicu podataka u .csv file. |
| Sačuvaj redosled kolone | Sačuvajte trenutni redoslijed polja. Ova postavka ostaje na snazi nakon ponovnog pokretanja PandaraView 2. |
Polja u tabeli podataka su definisana u nastavku:
| Ch | Kanal # |
| AziCorr | Azimut korigovan korekcijom ugla file |
| razdaljina | Udaljenost |
| Rfl | Reflektivnost |
| Azi | Azimut (trenutni referentni ugao rotora) |
| Ele | Elevacija |
| t | Timestamp |
| Polje | Za modele proizvoda iz porodice AT: zrcalna površina na kojoj se vrši ovo mjerenje. Polja 1/2/3 odgovaraju Mirror Surfaces 0/1/2, respektivno. |
| AziState | Azimuth State Koristi se za izračunavanje pomaka vremena paljenja svakog kanala; samo za određene modele lidara. |
| samopouzdanje | Samopouzdanje |
■ Druge kontrole ekrana 
| Ime dugmeta | Funkcija |
| Filter | Definirajte raspon prikaza oblaka tačaka. |
| Lasersko praćenje | Pokažite laserske zrake ove lidarske jedinice. |
| State Info | Prikažite informacije o statusu u donjem lijevom uglu područja prikaza oblaka tačaka, kao što su brzina motora, način povratka i naziv .PCAP-a file. |
| Dump PCD | Dump trenutni okvir u .pcd (podaci iz oblaka tačaka) file i navedite file lokacija. |
| Karta u boji | Postavite šemu boja prikaza oblaka tačaka. |
| Point Size | Postavite veličinu prikaza tačaka podataka. |
| Return Mode | Odaberite povrate koji će biti prikazani. |
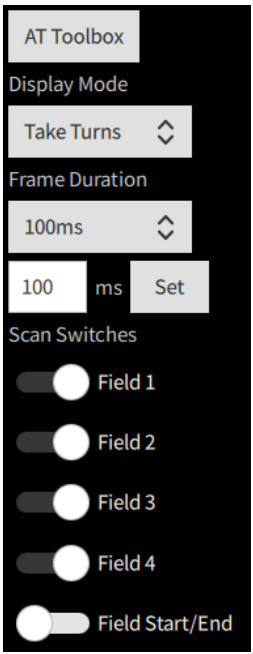
■ AT Family Toolbox
Za modele proizvoda koji pripadaju AT porodici. 
| Način prikaza | Smjenjivanje (podrazumevano): mjerenja iz Mirror Surfaces 0/1/2 izlaze u okvire 0/1/2, respektivno. Okviri nisu ušiveni. Kombinacija: mjerenja iz Mirror Surfaces 0/1/2 izlaze u jedan okvir. Odnosno, tri okvira su spojena kao jedan. Tradicija: mjerenja iz Mirror Surfaces 0/1/2 izlaze u jedan okvir prema njihovi uglovi kodera u paketima podataka oblaka tačaka. Ne vrši se korekcija ugla. |
| Trajanje okvira | Vremenski prozor za prikaz oblaka tačaka U režimu reprodukcije po vremenu (pogledajte odeljak 4.2 Kontrola reprodukcije), biće prikazane sve tačke podataka unutar ovog vremenskog prozora. |
| Prekidači za skeniranje | Za prikaz ili sakrivanje mjerenja sa svake površine ogledala. Polja 1/2/3 odgovaraju Mirror Surfaces 0/1/2, respektivno. Polje 4 se ne koristi. |
| Polje Početak/Kraj | Još nije podržano |
Rješavanje problema
U slučaju da sljedeći postupci ne mogu riješiti problem, kontaktirajte Hesai tehničku podršku.
| Simptomi | Points to Check |
| Lidar motor radi, ali se ne primaju izlazni podaci, ni na Wireshark ni na PandarView. | Provjerite da: · Eternet kabl je pravilno povezan (iskopčavanjem i ponovnim uključivanjem); · Lidarov odredišni IP je ispravno postavljen na stranici Postavke web kontrola; · Horizontalni FOV je pravilno postavljen na stranici Azimut FOV web kontrola; · verzija firmvera senzora je ispravno prikazana na stranici za nadogradnju web kontrola; · Lidar emituje lasersko svjetlo. Ovo se može provjeriti korištenjem infracrvene kamere, infracrvene senzorske kartice ili kamere telefona bez infracrvenog filtera. Ponovo uključite da provjerite da li se simptom nastavlja. |
| Može primati podatke na Wireshark, ali ne i na PandarView. | Provjerite da: · Odredišni port Lidara je ispravno postavljen na stranici Postavke web kontrolu · Zaštitni zid računara je onemogućen, ili taj PandarView se dodaje izuzecima zaštitnog zida · ako je VLAN omogućen, VLAN ID računara je isti kao i lidar · najnoviji PandarView verziju (pogledajte stranicu za preuzimanje Hesai-ovog službenog webili kontaktirajte Hesai tehničku podršku) je instaliran na računaru Ponovo uključite da provjerite da li se simptom nastavlja. |
Dodatak I Pravna obavijest
Autorsko pravo 2021 od strane Hesai Technology. Sva prava zadržana. Zabranjena je upotreba ili reprodukcija ovog priručnika u dijelovima ili u cijelosti bez odobrenja Hesaija.
Hesai Technology ne daje nikakve izjave ili garancije, bilo izričite ili implicirane, u vezi sa ovim sadržajem i posebno se odriče bilo kakvih garancija, mogućnosti prodaje ili pogodnosti za bilo koju određenu svrhu. Nadalje, Hesai Technology zadržava pravo da revidira ovu publikaciju i povremeno unese izmjene u njen sadržaj bez obaveze obavještavanja bilo koje osobe o takvoj reviziji ili promjenama.
HESAI i HESAI logo su registrovani zaštitni znakovi Hesai Technology. Svi ostali zaštitni znaci, uslužni znakovi i nazivi kompanija u ovom priručniku ili na službenoj strani kompanije Hesai webstranice su vlasništvo njihovih vlasnika.
Softver uključen u ovaj proizvod sadrži autorska prava koja su registrirana pod Hesai Technology. Bilo kojoj trećoj strani nije dozvoljeno, osim ako to izričito dozvoljava davalac licence ili izričito zahtijeva važeći zakon, dekompilirati, obrnuti inženjering, rastaviti, modificirati, iznajmljivati, iznajmljivati, pozajmljivati, distribuirati, podlicencirati, kreirati izvedena djela zasnovana na cjelini ili bilo kojem dijelu softvera.
Priručnik za servisiranje Hesai proizvoda u jamstvenom roku nalazi se na stranici s pravilima o jamstvu Hesai-jevog službenika webstranica: https://www.hesaitech.com/en/legal/warranty
Hesai Technology Co., Ltd.
Telefon: +86 400 805 1233
Webstranica: www.hesaitech.com
Adresa: Zgrada L2, Hongqiao World Centre, Šangaj, Kina
Poslovna e-pošta: info@hesaitech.com
Email usluge: service@hesaitech.com