![]() ПандарView 2
ПандарView 2
Воблака кропак
Праграму візуалізацыі
Кіраўніцтва карыстальніка
ПандарView Праграмнае забеспячэнне для 2-кропкавай візуалізацыі воблака
www.hesaitech.com
 HESAI Wechat
HESAI Wechat
http://weixin.qq.com/r/Fzns9IXEl9jorcGX92wF
Версія дакумента: PV2-en-230710
Пра гэта кіраўніцтва
■ Выкарыстанне гэтага кіраўніцтва
- Абавязкова прачытайце гэтае кіраўніцтва карыстальніка перад першым выкарыстаннем і прытрымлівайцеся інструкцый, якія змешчаны ў ім, калі будзеце працаваць з прадуктам. Невыкананне інструкцый можа прывесці да пашкоджання прадукту, страты маёмасці, цялесных пашкоджанняў і/або парушэння гарантыі.
- Гэта кіраўніцтва карыстальніка не змяшчае інфармацыі аб сертыфікатах прадукту. Калі ласка, праверце знакі сертыфікацыі на ніжняй панэлі прадукту і прачытайце адпаведныя папярэджанні аб сертыфікацыі.
- Калі вы ўбудуеце гэты прадукт лідар у свой прадукт(ы), вы павінны прадаставіць гэтае кіраўніцтва карыстальніка (або сродкі для доступу да гэтага кіраўніцтва карыстальніка) мэтавым карыстальнікам вашага прадукту(аў)
- Гэты лідар прызначаны як кампанент канчатковага прадукту. Ён павінен быць ацэнены ў канчатковым прадукце ў адпаведнасці з адпаведнымі стандартамі.
■ Доступ да гэтага кіраўніцтва
Каб атрымаць апошнюю версію:
- Наведайце старонку загрузкі афіцыйнага сайта Hesai webсайт: https://www.hesaitech.com/en/download
- Або звярніцеся да свайго гандлёвага прадстаўніка ў Hesai
- Або звярніцеся ў службу тэхнічнай падтрымкі Hesai: service@hesaitech.com
■ Тэхнічная падтрымка
Калі ваша пытанне не разглядаецца ў гэтым кіраўніцтве карыстальніка, звяжыцеся з намі па адрасе:
service@hesaitech.com
www.hesaitech.com/en/support
https://github.com/HesaiTechnology (Калі ласка, пакідайце свае пытанні пад адпаведнымі праектамі GitHub.)
■ Легенды
![]() Папярэджанні: інструкцыі, якія неабходна выконваць, каб забяспечыць бяспечнае і правільнае выкарыстанне прадукту.
Папярэджанні: інструкцыі, якія неабходна выконваць, каб забяспечыць бяспечнае і правільнае выкарыстанне прадукту.
![]() Заўвагі: дадатковая інфармацыя, якая можа быць карыснай.
Заўвагі: дадатковая інфармацыя, якая можа быць карыснай.
Уводзіны
ПандарView 2 - гэта праграмнае забеспячэнне другога пакалення, якое запісвае і адлюстроўвае даныя воблака кропак з лідараў Hesai, даступнае ў:
- 64-бітная windows 10
- Ubuntu 16.04/18.04/20.04
![]() Калі ваш кампутар выкарыстоўвае відэакарту AMD і працуе на Ubuntu-20.04, спампуйце графічны драйвер, які падтрымлівае Ubuntu-20.04, з афіцыйнага сайта AMD. webсайт. Каб атрымаць дадатковыя інструкцыі, звярніцеся ў службу тэхнічнай падтрымкі Hesai.
Калі ваш кампутар выкарыстоўвае відэакарту AMD і працуе на Ubuntu-20.04, спампуйце графічны драйвер, які падтрымлівае Ubuntu-20.04, з афіцыйнага сайта AMD. webсайт. Каб атрымаць дадатковыя інструкцыі, звярніцеся ў службу тэхнічнай падтрымкі Hesai.
Гэта кіраўніцтва апісвае PandarView 2.0.101. Падтрымліваюцца мадэлі прадуктаў:
| Пандар40 Пандар40М Пандар40П Пандар64 |
Pandar128E3X | PandarQT QT128C2X |
PandarXT PandarXT-16 XT32M2X |
AT128E2X | FT120 |
Ўстаноўка
Спампаваць інсталяцыю files ад чыноўніка Hesai webсайт або звярніцеся ў службу тэхнічнай падтрымкі: www.hesaitech.com/en/download
| сістэма | Ўстаноўка Files |
| вокны | ПандарView_Release_Win64_V2.x.xx.msi |
| Ubuntu | ПандарView_Release_Ubuntu_V2.x.xx.bin |
![]() У Ubuntu запусціце PandarView.ш у а file шлях, які змяшчае толькі сімвалы ASCII.
У Ubuntu запусціце PandarView.ш у а file шлях, які змяшчае толькі сімвалы ASCII.
Інтэрфейс праграмнага забеспячэння падзелены на чатыры раздзелы, як паказана ніжэй (дэталі могуць адрознівацца).
«Аб» у радку меню паказвае версію праграмнага забеспячэння.
Праверце Live Point Cloud
Каб атрымліваць даныя на свой ПК, усталюйце IP-адрас ПК 192.168.1.100 і маску падсеткі 255.255.255.0
| Для Ubuntu: | Для Windows: |
| Увядзіце гэтую каманду ifconfig у тэрмінал: ~$ sudo ifconfig enp0s20f0u2 192.168.1.100 (замяніце enp0s20f0u2 назвай лакальнага порта Ethernet) |
Адкрыйце Цэнтр сумеснага выкарыстання сетак, націсніце «Ethernet» У полі «Стан Ethernet» націсніце «Уласцівасці» Двойчы пстрыкніце «Пратакол Інтэрнэту версіі 4 (TCP/IPv4)» Наладзьце IP-адрас 192.168.1.100 і маску падсеткі 255.255.255.0 |
3.1 Канфігурацыя кібербяспекі
Для мадэляў прадуктаў, якія падтрымліваюць кібербяспеку, ![]() (Кібербяспека) з'явіцца на панэлі інструментаў.
(Кібербяспека) з'явіцца на панэлі інструментаў.
Карыстальнікі могуць выбраць адзін з трох рэжымаў:
■ Рэжым TLS
У рэжыме TLS, PandarView 2 аўтаматычна атрымлівае карэкцыю лідара fileз выкарыстаннем каманд PTCS (PTC праз TLS).
| Старонка бяспекі web кантроль | Уключыце галоўны пераключальнік Cyber Security. |
| Выберыце TLS для злучэння PTC. | |
| ПандарView 2 | Выберыце TLS для злучэння PTC. |
| Націсніце кнопку «CA CRT» і ўкажыце file шлях ланцужка сертыфікатаў ЦС Hesai (Hesai_Ca_Chain.crt). |
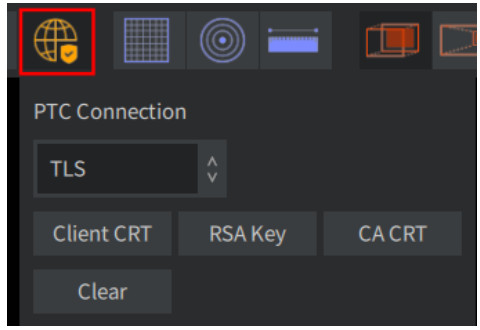
■ Рэжым mTLS
У рэжыме mTLS, PandarView 2 аўтаматычна атрымлівае карэкцыю лідара fileз выкарыстаннем каманд PTCS.
| Старонка бяспекі web кантроль | Уключыце галоўны пераключальнік Cyber Security. |
| Выберыце mTLS для злучэння PTC; загрузіць ланцужок сертыфікатаў ЦС карыстальніка. | |
| ПандарView 2 | Выберыце mTLS для злучэння PTC. |
| Націсніце кнопку «CA CRT»; удакладніце file шлях ланцужка сертыфікатаў Hesai CA (Hesai_Ca_Chain.crt). | |
| Націсніце кнопку «Кліент CRT»; удакладніце file шлях да сертыфіката канчатковага аб'екта карыстальніка. | |
| Націсніце кнопку «Ключ RSA»; удакладніце file шлях прыватнага ключа карыстальніка (адпаведнага сертыфікату канчатковага аб'екта карыстальніка). |
![]() Кнопка «Ачысціць» выдаляе ўказаны file шляхі для CA CRT, Client CRT і RSA Key.
Кнопка «Ачысціць» выдаляе ўказаны file шляхі для CA CRT, Client CRT і RSA Key.
■ Кібербяспека ВЫКЛ
У гэтым рэжыме ПандарView 2 аўтаматычна атрымлівае карэкцыю лідара fileз выкарыстаннем каманд PTC.
| Старонка бяспекі web кантроль | Выключыце галоўны пераключальнік Cyber Security |
| ПандарView 2 | Выберыце Non-TLS для злучэння PTC |
3.2 Атрыманне жывых дадзеных
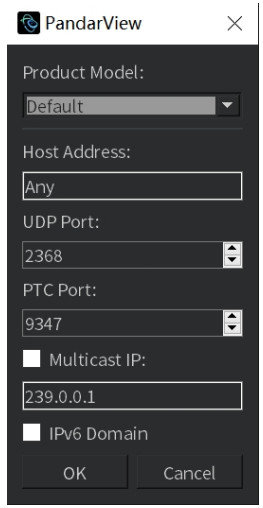
- Панэль інструментаў:
 (Слухаць Net)
(Слухаць Net) - Ва ўсплываючым дыялогавым акне:
| Мадэль прадукту | Па змаўчанні |
| Адрас гаспадара | Любая |
| Порт UDP | Павінен быць такім жа, як «Порт прызначэння Lidar» на старонцы налад web кантроль. 2368 па змаўчанні. |
| Порт PTC | Выкарыстоўваецца для перадачы каманд PTC. 9347 па змаўчанні. |
| Шматадрасны IP | У шматадрасным рэжыме пастаўце сцяжок і ўкажыце групу шматадраснай перадачы |
| Дамен IPv6 | Падтрымліваецца толькі на некаторых мадэлях прадуктаў |
![]() Пры атрыманні жывых дадзеных:
Пры атрыманні жывых дадзеных:
- Карыстальнікі могуць экспартаваць карэкцыю вугла file і карэкцыя часу стральбы file, гл. раздзел 5.1 (Карэкцыя воблака кропак).
 Кнопка (Жывая трансляцыя) на кансолі дазваляе трансляваць жывыя даныя з мінімальнай затрымкай.
Кнопка (Жывая трансляцыя) на кансолі дазваляе трансляваць жывыя даныя з мінімальнай затрымкай.
![]()
3.3 Запіс жывых дадзеных
Націсніце ![]() (Запіс) у кансолі і ўкажыце a file каталог. Націсніце «Захаваць», каб пачаць запіс .pcap file.
(Запіс) у кансолі і ўкажыце a file каталог. Націсніце «Захаваць», каб пачаць запіс .pcap file.
![]() Пры найменні .pcap files у Ubuntu, уключыце fileпашырэнне імя (.pcap).
Пры найменні .pcap files у Ubuntu, уключыце fileпашырэнне імя (.pcap).
Гуляць Back Point Cloud
4.1 Адкрыйце .PCAP File
- Націсніце
 (Адкрыць File) на панэлі інструментаў і абярыце .pcap file ва ўсплываючым акне.
(Адкрыць File) на панэлі інструментаў і абярыце .pcap file ва ўсплываючым акне.
Акрамя таго, перацягнуць .pcap file у ПандарView 2. - Пасля завяршэння загрузкі ў кансолі з'явіцца дарожка воблака кропак.

![]() Заўвагі
Заўвагі
- Падтрымліваецца толькі фармат tcpdump pcap.
- Падтрымлівайце толькі адзін трэк воблака кропак адначасова: пры атрыманні жывых даных або адкрыцці новага .pcap file, папярэдні трэк будзе аўтаматычна выдалены.
- Вялікі .pcap fileзагрузка можа заняць некаторы час. Падчас загрузкі націсніце (Жывая трансляцыя), каб адначасова прайграваць даныя воблака кропак.
- Калі мадэль прадукту lidar і нумар порта адлюстроўваюцца не цалкам, пракруціце кола мышы.
4.2 Кіраванне прайграваннем 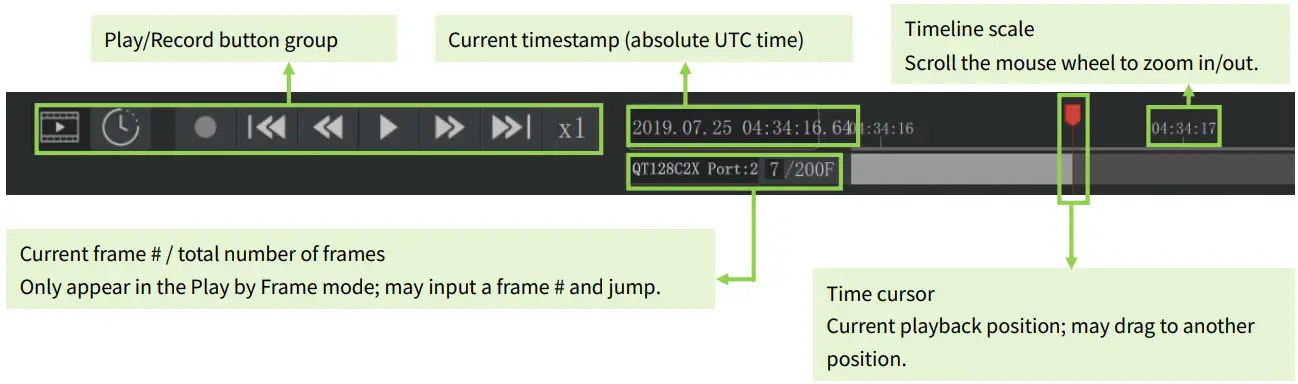
| Кнопка | Апісанне |
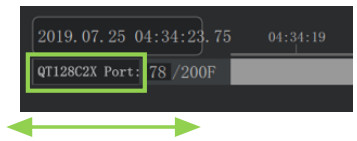
 |
Злева: прайграванне па кадрах (па змаўчанні) Справа: прайграванне па часе |
 |
Перайсці да пачатку або да канца file |
 |
Злева: наладзіць хуткасць перамоткі (1x, 1/2x, 1/4x, 1/8x, …, 1/64x) Справа: наладзіць хуткасць перамоткі (1x, 2x, 4x, 8x, …, 64x) |
 |
Злева: пасля загрузкі a file, націсніце, каб гуляць. Справа: падчас гульні a file, націсніце, каб прыпыніць. |
 |
Адлюстраванне бягучай хуткасці |
| Падчас загрузкі a file, націсніце, каб гуляць адразу. (Пасля завяршэння загрузкі гэтая кнопка знікае.) Пры атрыманні жывых дадзеных націсніце для трансляцыі з мінімальнай затрымкай. |
Карэкцыя і канфігурацыя
Пры праверцы воблака кропак у рэальным часе або прайграванні запісанага воблака кропак, выпраўленне files і канфігурацыя files могуць быць выкарыстаны.
5.1 Карэкцыя воблака кропак
| Карэкцыя вугла | Выпраўце дадзеныя па азімуце і вышыні. Глядзіце раздзел 1.3 (Размеркаванне каналаў) у кіраўніцтве карыстальніка lidar. |
| Пажарная карэкцыя | Для пэўных мадэляў прадуктаў: карэкціруйце азімут даных воблака кропак у адпаведнасці з часам узгарання кожнага канала. |
| Карэкцыя адлегласці | Для некаторых мадэляў прадуктаў: выпраўце даныя адлегласці. |
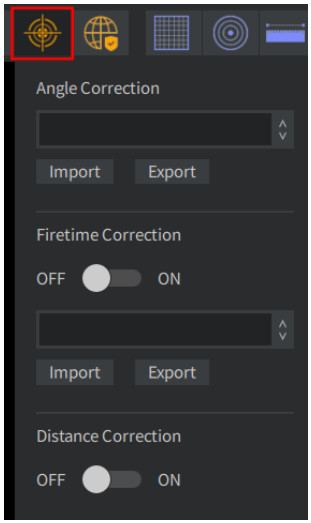
Націсніце ![]() (Выпраўленне) на панэлі інструментаў:
(Выпраўленне) на панэлі інструментаў:
| Тып карэкцыі | Апісанне |
| Карэкцыя вугла | Пры праверцы жывога воблака кропак: • ПандарView 2 аўтаматычна атрымлівае выпраўленне file гэтага лідара. Пры прайграванні запісанага воблака кропак: • ПандарView 2 аўтаматычна загружае агульную карэкцыю file для гэтай мадэлі прадукту. • Для найлепшага адлюстравання націсніце «Імпартаваць» і абярыце выпраўленне file гэтага лідара. |
| Пажарная карэкцыя | QT128C2X: • Пры праверцы жывога воблака кропак: PandarView 2 аўтаматычна атрымлівае выпраўленне file гэтага лідара; уключыце і пачніце карэкцыю. • Пры прайграванні запісанага воблака кропак: PandarView 2 аўтаматычна загружае агульную карэкцыю file для гэтай мадэлі прадукту; уключыце і пачніце карэкцыю. Іншыя мадэлі прадукту: • Уключыце, націсніце «Імпартаваць» і абярыце выпраўленне file гэтага лідара. • Калі карэкцыя лідара file недаступны лакальна, уключыце і выберыце агульную карэкцыю file для гэтай мадэлі прадукту ў выпадальным меню. |
| Карэкцыя адлегласці | Пераключыце на ON. |
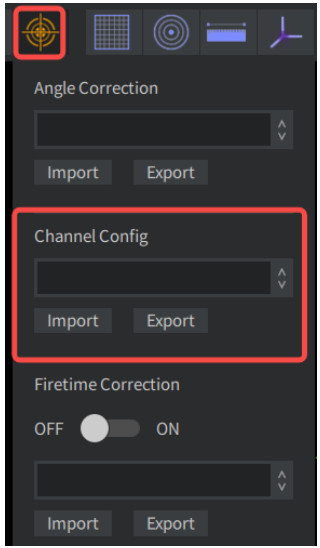
5.2 Канфігурацыя канала
Канфігурацыя канала file выбірае падмноства з усіх даступных каналаў лідара, вызначае колькасць блокаў у пакеце дадзеных воблака кропак і вызначае каналы, якія будуць захоўвацца ў кожным блоку.
Даступна толькі для QT128C2X:
- Пры праверцы жывога воблака кропак: PandarView 2 аўтаматычна атрымлівае канфігурацыю канала file гэтага лідара.
- Пры прайграванні запісанага воблака кропак: націсніце
 (Выпраўленне) на панэлі інструментаў націсніце «Імпартаваць» у раздзеле «Канфігурацыя канала» і абярыце канфігурацыю канала file гэтага лідара.
(Выпраўленне) на панэлі інструментаў націсніце «Імпартаваць» у раздзеле «Канфігурацыя канала» і абярыце канфігурацыю канала file гэтага лідара.
5.3 File Імпарт і экспарт
File імпартаваць
- Пры праверцы воблака кропак у рэальным часе кнопка «Экспарт» можа выкарыстоўвацца для загрузкі выпраўлення або канфігурацыі files гэтага лідара.
- Калі называць гэтыя files у Ubuntu, не забудзьцеся ўключыць fileпашырэнне імя (.dat для карэкцыі кута files сямейства AT і .csv для астатніх).
File экспарт
- Імпартаванае выпраўленне або канфігурацыя files дадаюцца ўнізе выпадальнага меню.
- Калі яны вам больш не патрэбныя files, вы можаце выдаліць іх па наступным шляху (уступае ў сілу пасля перазапуску PandarView 2): Дакументы\ПандарViewданыяFiles\csv
Іншыя асаблівасці
6.1 Ярлыкі мышы
| Перацягванне левай кнопкай | Паварот воблака кропак |
| Перацягнуць правай кнопкай | Павелічэнне/памяншэнне: перацягванне ўлева для памяншэння і ўправа для павелічэння |
| Пракруціць кола | Павелічэнне/памяншэнне: пракрутка ўніз для памяншэння і ўверх для павелічэння |
| Націсніце кола і перацягніце | Панарамаваць view |
| Shift і перацягванне левай кнопкай | Круціце воблака кропак вакол viewнапрамку (кірунак ад ст viewпаказаць пачатак каардынат) |
| Shift і перацягванне правай кнопкай | Панарамаваць view |
6.2 Воблака кропак
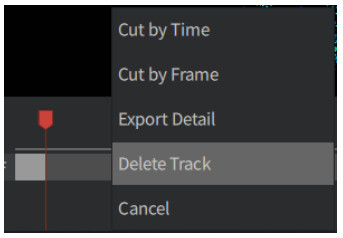
Пстрыкніце правай кнопкай мышы на дарожцы воблака кропак:
| Зрэзаны часам | Укажыце час пачатку/канцаamps, выразаць бягучы трэк і захаваць у новым .pcap file. |
| Выразаць кадрам | Укажыце пачатковы/канец кадраў, выражыце бягучую дарожку і захавайце ў новы .pcap file. |
| Дэталь экспарту | Пасля выбару вобласці кропак (гл. Раздзел 6.3 Панэль інструментаў – Выбар кропак і табліца даных), укажыце пачатковы/канечны кадры і экспартуйце адпаведныя даныя воблака кропак у .csv files. · Выкарыстоўвайце · Калі называць гэтыя files у Ubuntu, не забудзьцеся ўключыць fileпашырэнне імя (.csv). |
| Выдаліць трэк | Выдаліць бягучы трэк. |
| Адмяніць | Зачыніце меню правай кнопкі мышы. |
6.3 Панэль інструментаў
Калі пандарView 2 акно занадта вузкае для адлюстравання панэлі інструментаў цалкам, пракруціце кола мышы да яго view усе кнопкі.
■ Сетка каардынат, сістэма каардынат і вымярэнне адлегласці 
| Назва кнопкі | Функцыя |
| дэкартаўскі | Паказаць/схаваць сеткі з інтэрвалам 30 м |
| Палярны | Паказаць/схаваць роўнаадлеглыя кругі з інтэрвалам 10 м |
| Лінейка | Перацягніце левай кнопкай, каб вымераць адлегласць паміж дзвюма кропкамі |
| Каардынаты | Пакажыце прамавугольную сістэму каардынат |
■ Рэжымы праекцыі

| Назва кнопкі | Функцыя |
| Арфаграфічная праекцыя | – |
| Перспектыўная праекцыя | – |
■ Кропка View і спінінг
| Назва кнопкі | Функцыя |
| Спераду/ззаду/злева/справа/зверху | – |
| Спін | Круціце viewнапрамку (кірунак ад ст viewкропка ў пачатак каардынат) вакол восі Z |
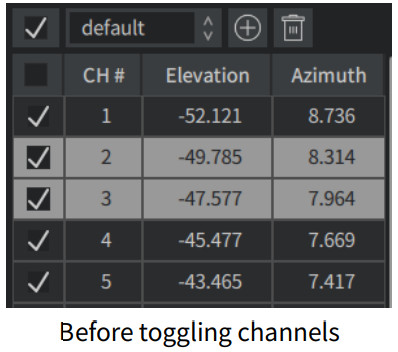
■ Выбар канала 
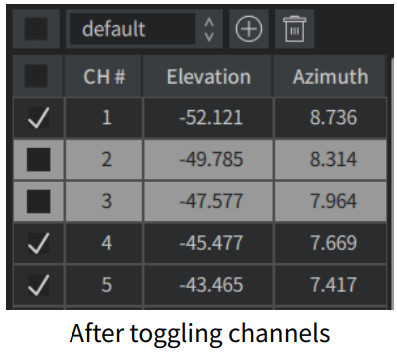
Націсніце ![]() (Каналы) да view або змяніць каналы, якія адлюстроўваюцца ў цяперашні час.
(Каналы) да view або змяніць каналы, якія адлюстроўваюцца ў цяперашні час.
Паказаць або схаваць каналы
- Усталюйце/зніміце сцяжкі злева ад кожнага канала, каб паказаць/схаваць дадзеныя воблака кропак.
- Па змаўчанні адлюстроўваюцца ўсе каналы.
Выберыце і пераключыце каналы
- Націсніце на канал (за выключэннем вобласці яго сцяжка), каб выбраць і вылучыць гэты канал.
- Каб выбраць некалькі суседніх каналаў, утрымлівайце клавішу Shift.
- Утрымлівайце Ctrl, націскаючы, каб выбраць некалькі асобных каналаў.
- Націсніце
 (Пераключыць выбраныя каналы) у левым верхнім куце, каб пераключыць выбраныя каналы паміж пазначанымі і не пазначанымі.
(Пераключыць выбраныя каналы) у левым верхнім куце, каб пераключыць выбраныя каналы паміж пазначанымі і не пазначанымі.
Захаваць групы каналаў
- Націсніце
 каб захаваць адзначаныя каналы як канфігурацыю і назваць яе.
каб захаваць адзначаныя каналы як канфігурацыю і назваць яе. - Раней захаваныя канфігурацыі існуюць пасля перазапуску PandarView 2 і можа быць абраны ў
 выпадальнае меню.
выпадальнае меню. - Каб выдаліць выбраную канфігурацыю, націсніце
 .
.
■ Выбар кропак і табліца даных
Націсніце ![]() (Выберыце) і перацягніце мышку, каб вылучыць вобласць кропак.
(Выберыце) і перацягніце мышку, каб вылучыць вобласць кропак.
Націсніце ![]() (Разваротны ліст) да view дадзеныя выдзеленых кропак, як паказана ніжэй.
(Разваротны ліст) да view дадзеныя выдзеленых кропак, як паказана ніжэй. 
Пры падвойным пстрычцы па загалоўку поля некалькі разоў выконваюцца наступныя дзеянні:
- Адаптуйце шырыню слупка да назвы поля
(У якасці альтэрнатывы пастаўце курсор мышы паміж двума загалоўкамі так, каб курсор стаў стрэлкай улева-ўправа; перацягніце мыш, каб наладзіць шырыню слупка.) - Адсартуйце гэта поле па ўзрастанні. Стрэлка ўверх
 з'явіцца справа.
з'явіцца справа. - Адсартаваць гэтае поле ў парадку змяншэння. Стрэлка ўніз
 з'явіцца справа.
з'явіцца справа. - Адмяніць сартаванне.
Група кнопак у левым верхнім куце:

| Выбраць усе | Пстрыкніце, каб паказаць дадзеныя ўсіх кропак у гэтым кадры. Пстрыкніце яшчэ раз, каб паказаць толькі дадзеныя выбраных пунктаў. |
| Экспарт інфармацыі аб балах | Экспарт бягучай табліцы даных у .csv file. |
| Захаваць парадак слупкоў | Захаваць бягучы парадак палёў. Гэты параметр застаецца ў сіле пасля перазапуску PandarView 2. |
Палі ў табліцы даных вызначаны ніжэй:
| Ch | # Канал |
| AziCorr | Азімут скарэкціраваны папраўкай на вугал file |
| Dist | Дыстанцыя |
| Rfl | Адбівальная здольнасць |
| Азі | Азімут (бягучы эталонны вугал ротара) |
| Эле | Узвышша |
| t | Часamp |
| Палявы | Для мадэляў прадуктаў сямейства AT: люстраная паверхня, на якой зроблена гэта вымярэнне. Палі 1/2/3 адпавядаюць люстраным паверхням 0/1/2 адпаведна. |
| Азідзяржава | Азімут Дзярж Выкарыстоўваецца для разліку зрушэння часу спрацоўвання кожнага канала; толькі для некаторых мадэляў лідараў. |
| упэўненасць | Упэўненасць |
■ Іншыя элементы кіравання дысплеем 
| Назва кнопкі | Функцыя |
| Фільтраваць | Вызначце дыяпазон адлюстравання воблака кропак. |
| Лазерная трасіроўка | Пакажыце лазерныя прамяні гэтага лідара. |
| Дзяржаўная інфармацыя | Адлюстраванне інфармацыі аб стане ў левым ніжнім куце вобласці адлюстравання воблака кропак, напрыклад, хуткасць рухавіка, рэжым вяртання і назва .PCAP file. |
| Дамп PCD | Скід бягучага кадра ў .pcd (Даныя воблака кропак) file і ўкажыце file размяшчэнне. |
| Каляровая карта | Усталюйце каляровую схему адлюстравання воблака кропак. |
| Памер кропкі | Усталюйце памер адлюстравання кропак дадзеных. |
| Рэжым вяртання | Выберыце звароты для адлюстравання. |
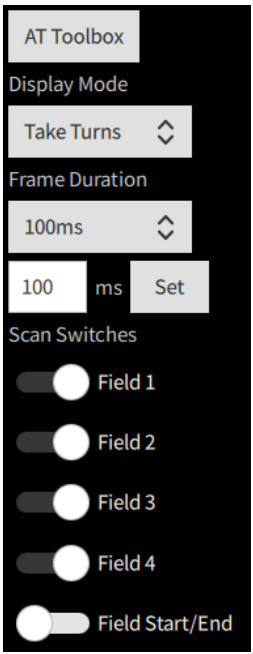
■ AT Family Toolbox
Для мадэляў прадуктаў сямейства AT. 
| Рэжым адлюстравання | Па чарзе (па змаўчанні): вымярэнні з люстраных паверхняў 0/1/2 выводзяцца ў кадры 0/1/2 адпаведна. Рамы не прашытыя. Камбінацыя: вымярэнні з люстраных паверхняў 0/1/2 выводзяцца ў адзін кадр. Гэта значыць тры рамкі сшываюцца як адна. Традыцыя: вымярэнні з люстраных паверхняў 0/1/2 выводзяцца на адзін кадр у адпаведнасці з іх куты кадавальніка ў пакетах дадзеных воблака кропак. Карэкцыя вугла не выконваецца. |
| Працягласць кадра | Часовае акно для адлюстравання воблака кропак У рэжыме прайгравання па часе (гл. Раздзел 4.2 Кіраванне прайграваннем) будуць адлюстраваны ўсе кропкі даных у межах гэтага часовага акна. |
| Пераключальнікі сканавання | Каб паказаць або схаваць вымярэнні кожнай люстраной паверхні. Палі 1/2/3 адпавядаюць люстраным паверхням 0/1/2 адпаведна. Поле 4 не выкарыстоўваецца. |
| Пачатак/канец поля | Пакуль не падтрымліваецца |
Ліквідацыю непаладак
Калі наступныя працэдуры не могуць вырашыць праблему, звярніцеся ў службу тэхнічнай падтрымкі Hesai.
| Сімптомы | Кропкі для праверкі |
| Рухавік Lidar працуе, але выхадныя даныя не атрымліваюцца ні на Wireshark, ні на PandarView. | Пераканайцеся, што: · Кабель Ethernet правільна падключаны (адключыўшы і падключыўшы зноў); · IP прызначэння Lidar правільна ўсталяваны на старонцы налад web кантроль; · гарызантальны кут агляду правільна настроены на старонцы азімутальнага поля агляду web кантроль; · версія прашыўкі датчыка правільна паказана на старонцы абнаўлення web кантроль; · Лідар выпраменьвае лазернае святло. Гэта можна праверыць з дапамогай інфрачырвонай камеры, карты інфрачырвонага датчыка або камеры тэлефона без інфрачырвонага фільтра. Уключыце зноў, каб праверыць, ці не знікне сімптом. |
| Можа атрымліваць даныя на Wireshark, але не на PandarView. | Пераканайцеся, што: · порт прызначэння Lidar усталяваны правільна на старонцы налад web кантроль · Брандмаўэр ПК адключаны, або што PandarView дадаецца да выключэнняў брандмаўэра · калі VLAN уключаны, ідэнтыфікатар VLAN ПК супадае з ідэнтыфікатарам лідара · апошні PandarView версія (гл. старонку загрузкі афіцыйнай версіі Hesai webабо звярніцеся ў службу тэхнічнай падтрымкі Hesai) усталяваны на ПК Уключыце зноў, каб праверыць, ці не знікне сімптом. |
Дадатак I Юрыдычная інфармацыя
Аўтарскае права, 2021 г., Hesai Technology. Усе правы ахоўваюцца. Выкарыстанне або прайграванне гэтага кіраўніцтва часткова або цалкам без дазволу Hesai забаронена.
Hesai Technology не робіць ніякіх заяў або гарантый, відавочных або пэўных, у дачыненні да зместу гэтага дакумента і, у прыватнасці, адмаўляецца ад любых гарантый, камерцыйнай якасці або прыдатнасці для любой канкрэтнай мэты. Акрамя таго, Hesai Technology пакідае за сабой права пераглядаць гэтую публікацыю і час ад часу ўносіць змены ў яе змест без абавязацельстваў паведамляць каму-небудзь аб такіх пераглядах або змяненнях.
HESAI і лагатып HESAI з'яўляюцца зарэгістраванымі гандлёвымі маркамі Hesai Technology. Усе іншыя гандлёвыя маркі, знакі абслугоўвання і назвы кампаній у гэтым кіраўніцтве або на афіцыйным сайце Hesai webсайт з'яўляецца ўласнасцю іх адпаведных уладальнікаў.
Праграмнае забеспячэнне, якое ўваходзіць у гэты прадукт, мае аўтарскія правы, зарэгістраваныя ў адпаведнасці з Hesai Technology. Любому трэцяму боку забаронена, за выключэннем выпадкаў, калі гэта прама дазволена ліцэнзіярам або прама прадугледжана дзеючым заканадаўствам, дэкампіляваць, ажыццяўляць зваротную інжынерыю, разбіраць, мадыфікаваць, здаваць у арэнду, здаваць у арэнду, пазычаць, распаўсюджваць, субліцэнзаваць, ствараць вытворныя працы на аснове ўсяго або любой часткі праграмнага забеспячэння.
Кіраўніцтва па гарантыйным абслугоўванні прадуктаў Hesai знаходзіцца на старонцы гарантыйнай палітыкі афіцыйнага прадстаўніка Hesai webсайт: https://www.hesaitech.com/en/legal/warranty
Кампанія Hesai Technology Co., Ltd.
Тэлефон: +86 400 805 1233
Webсайт: www.hesaitech.com
Адрас: Будынак L2, Сусветны цэнтр Хунцяо, Шанхай, Кітай
Дзелавая электронная пошта: info@hesaitech.com
Служба электроннай пошты: service@hesaitech.com