![]() PandaruView 2
PandaruView 2
Nuvola di punti
Software di visualizazione
Manuale d'usu
PandaruView Software di visualizazione di nuvola à 2 punti
www.hesaitech.com
 HESAI Wechat
HESAI Wechat
http://weixin.qq.com/r/Fzns9IXEl9jorcGX92wF
Versione Doc: PV2-en-230710
Circa stu Manuale
■ Utilizà stu Manuale
- Assicuratevi di leghje stu manuale d'utilizatore prima di u primu usu è seguite l'istruzzioni quì sottu quandu operate u pruduttu. U fallimentu di rispettà l'istruzzioni pò risultà in danni à u produttu, perdita di pruprietà, ferite persunali, è / o una violazione di a garanzia.
- Stu manuale d'utilizatore ùn cuntene infurmazioni nantu à e certificazioni di u produttu. Per piacè verificate i marchi di certificazione nantu à a piastra inferiore di u produttu è leghjite l'avvertimenti di certificazione currispondenti.
- Se incorpore stu pruduttu lidar in i vostri prudutti, avete bisognu di furnisce stu manuale d'utilizatore (o i mezi per accede à stu manuale d'utilizatore) à l'utilizatori destinati di u vostru pruduttu (s)
- Stu pruduttu lidar hè pensatu cum'è un cumpunente di un pruduttu finitu. Deve esse valutatu in u pruduttu finale secondu e norme pertinenti.
■ Accessu à stu Manuale
Per uttene l'ultima versione:
- Visita a pagina di scaricamentu di l'ufficiale di Hesai websitu: https://www.hesaitech.com/en/download
- O cuntattate u vostru rappresentante di vendita in Hesai
- O cuntattate u squadra di supportu tecnicu di Hesai: service@hesaitech.com
■ Assistenza tecnica
Se a vostra dumanda ùn hè micca trattata in stu manuale d'utilizatore, per piacè cuntattateci à:
service@hesaitech.com
www.hesaitech.com/en/support
https://github.com/HesaiTechnology (Per piacè lasciate e vostre dumande sottu à i prughjetti GitHub currispondenti.)
■ Legends
![]() Avvertimenti: struzzioni chì deve esse seguitu per assicurà un usu sicuru è propiu di u pruduttu.
Avvertimenti: struzzioni chì deve esse seguitu per assicurà un usu sicuru è propiu di u pruduttu.
![]() Note: infurmazione supplementaria chì pò esse utile.
Note: infurmazione supplementaria chì pò esse utile.
Introduzione
PandaruView 2 hè un software di seconda generazione chì registra è mostra dati di nuvola di punti da Hesai lidars, dispunibule in:
- 64-bit Windows 10
- Ubuntu 16.04/18.04/20.04
![]() Se u vostru urdinatore usa una carta grafica AMD è funziona in Ubuntu-20.04, scaricate u driver graficu chì supporta Ubuntu-20.04 da l'ufficiale di AMD. websitu. Per istruzioni supplementari, cuntattate l'assistenza tecnica Hesai.
Se u vostru urdinatore usa una carta grafica AMD è funziona in Ubuntu-20.04, scaricate u driver graficu chì supporta Ubuntu-20.04 da l'ufficiale di AMD. websitu. Per istruzioni supplementari, cuntattate l'assistenza tecnica Hesai.
Stu manuale descrive PandarView 2.0.101. Modelli di prudutti supportati:
| Pandaru 40 Pandar40M Pandar40P Pandaru 64 |
Pandar128E3X | PandarQT QT128C2X |
PandarXT PandarXT-16 XT32M2X |
AT128E2X | FT120 |
Installazione
Scaricate a stallazione files da l'ufficiale di Hesai websitu, o cuntattate l'assistenza tecnica: www.hesaitech.com/en/download
| Sistema | Installazione Files |
| Windows | PandaruView_Release_Win64_V2.x.xx.msi |
| Ubuntu | PandaruView_Release_Ubuntu_V2.x.xx.bin |
![]() In Ubuntu, eseguite PandarView.sh in un file chemin qui contient uniquement des caractères ASCII.
In Ubuntu, eseguite PandarView.sh in un file chemin qui contient uniquement des caractères ASCII.
L'interfaccia di u software hè divisa in quattru sezioni, cum'è mostra quì sottu (i dettagli ponu esse sfarenti).
"About" in a barra di menu mostra a versione di u software.
Verificate Live Point Cloud
Per riceve dati in u vostru PC, stabilisce l'indirizzu IP di u PC à 192.168.1.100 è a maschera di subnet à 255.255.255.0
| Per Ubuntu: | Per Windows: |
| Ingressu stu cumandimu ifconfig in u terminal: ~$ sudo ifconfig enp0s20f0u2 192.168.1.100 (sustituite enp0s20f0u2 cù u nome di portu Ethernet locale) |
Aprite u Centru di Sharing Network, cliccate nant'à "Ethernet" In a casella "Status Ethernet", cliccate nantu à "Proprietà". Cliccate doppiu nantu à "Protokollu Internet Versione 4 (TCP / IPv4)" Configurate l'indirizzu IP à 192.168.1.100 è a maschera di subnet à 255.255.255.0 |
3.1 Configurazione di Cybersecurity
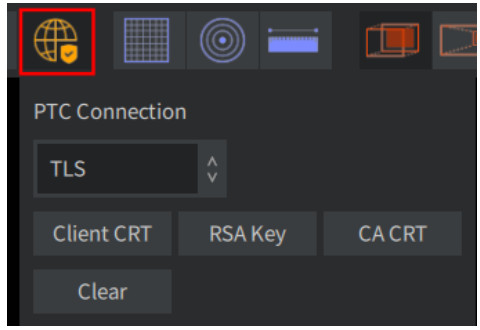
Per i mudelli di produttu chì sustene a Cybersecurity, ![]() (Cybersecurity) apparirà in a toolbar.
(Cybersecurity) apparirà in a toolbar.
L'utilizatori ponu selezziunà unu di i trè modi:
■ Modu TLS
In Modu TLS, PandarView 2 recupera automaticamente a correzione di l'unità lidar files utilizendu cumandamenti PTCS (PTC over TLS).
| Pagina di sicurità di web cuntrollu | Accende u Switch Master Cyber Security. |
| Selezziunà TLS per a cunnessione PTC. | |
| PandaruView 2 | Selezziunà TLS per a cunnessione PTC. |
| Cliccate u buttone "CA CRT" è specificà u file percorso di a catena di certificati CA di Hesai (Hesai_Ca_Chain.crt). |
■ Modu mTLS
In Modu mTLS, PandarView 2 recupera automaticamente a correzione di l'unità lidar files usendu cumandamenti PTCS.
| Pagina di sicurità di web cuntrollu | Accende u Switch Master Cyber Security. |
| Selezziunà mTLS per a cunnessione PTC; caricate a catena di certificati CA d'utilizatore. | |
| PandaruView 2 | Selezziunà mTLS per a cunnessione PTC. |
| Cliccate u buttone "CA CRT"; specificà u file percorso di a catena di certificati Hesai CA (Hesai_Ca_Chain.crt). | |
| Cliccate u buttone "Client CRT"; specificà u file percorsu di u certificatu di l'entità finale di l'utilizatore. | |
| Cliccate u buttone "RSA Key"; specificà u file percorsu di a chjave privata di l'utilizatore (currispondente à u certificatu di l'entità finale di l'utilizatore). |
![]() U buttone "Clear" elimina u specificatu file percorsi per CA CRT, Client CRT e RSA Key.
U buttone "Clear" elimina u specificatu file percorsi per CA CRT, Client CRT e RSA Key.
■ Cybersecurity OFF
In questu modu, PandarView 2 recupera automaticamente a correzione di l'unità lidar files usendu cumandamenti PTC.
| Pagina di sicurità di web cuntrollu | Spegne l'Interruttore Master Cyber Security |
| PandaruView 2 | Selezziunà Non-TLS per a cunnessione PTC |
3.2 Riceve Dati Live
- barra di strumenti:
 (Ascolta Net)
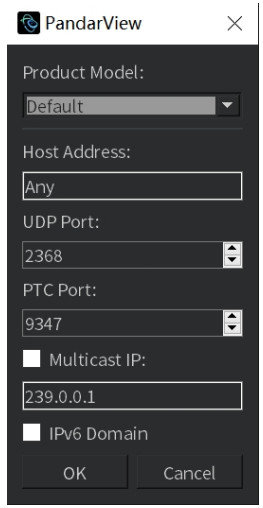
(Ascolta Net) - In a finestra di dialogu pop-up:
| Modellu di produttu | Default |
| Indirizzu di l'ospitu | Qualchese |
| Port UDP | Deve esse u listessu cum'è "Lidar Destination Port" in a pagina Settings di web cuntrollu. 2368 per difettu. |
| Port PTC | Adupratu per trasmette cumandamenti PTC. 9347 per difettu. |
| IP multicast | In u modu multicast, verificate a casella di verificazione è specifica un gruppu multicast |
| Dominiu IPv6 | Solu supportatu nantu à certi mudelli di prudutti |
![]() Mentre riceve dati in diretta:
Mentre riceve dati in diretta:
- L'utilizatori ponu esportà a correzione d'angolo file è a correzione di u tempu di tiru file, vede Sezione 5.1 (Correction Cloud Point).
 U buttone (Live Streaming) in a cunsola permette u streaming di latenza minima di dati in diretta.
U buttone (Live Streaming) in a cunsola permette u streaming di latenza minima di dati in diretta.
![]()
3.3 Record Live Dati
Cliccate ![]() (Record) in a cunsola è specificate a file annuariu. Cliccate "Salvà" per inizià a registrazione di un .pcap file.
(Record) in a cunsola è specificate a file annuariu. Cliccate "Salvà" per inizià a registrazione di un .pcap file.
![]() Quandu si chjama .pcap files in Ubuntu, include u fileestensione di nome (.pcap).
Quandu si chjama .pcap files in Ubuntu, include u fileestensione di nome (.pcap).
Play Back Point Cloud
4.1 Apertura un .PCAP File
- Cliccate
 (Apertu File) in a toolbar è selezziunate un .pcap file in a finestra pop-up.
(Apertu File) in a toolbar è selezziunate un .pcap file in a finestra pop-up.
In alternativa, trascinate un .pcap file in PandarView 2. - Quandu a carica hè cumpleta, una traccia di nuvola di punti apparirà in a cunsola.

![]() Notes
Notes
- Supporta solu u formatu tcpdump pcap.
- Solu sustene una traccia di nuvola di punti à una volta: quandu riceve dati in diretta o apre un novu .pcap file, a traccia precedente serà sguassata automaticamente.
- Grande .pcap files pò piglià un pocu di tempu per carica. Mentre carica, cliccate (Live Streaming) per ghjucà i dati di nuvola di punti in una volta.
- Se u mudellu di u produttu lidar è u numeru di portu ùn sò micca visualizati in tuttu, scorri a rota di u mouse.
4.2 Play Control 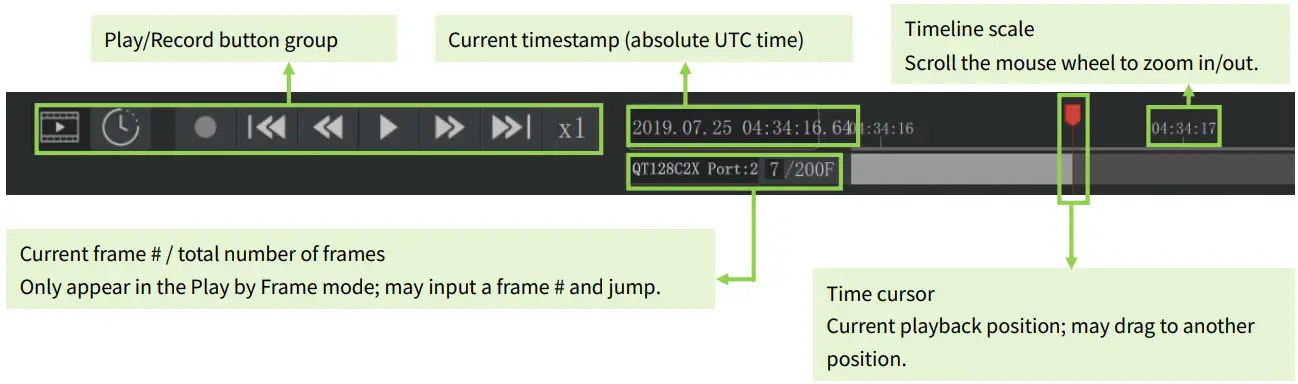
| Pulsante | Descrizzione |
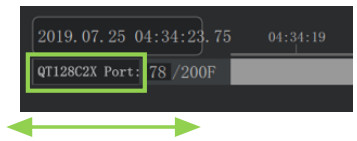
 |
Left: ghjucà per quadru (predeterminatu) Right: ghjucà per tempu |
 |
Saltà à u principiu o a fine di u file |
 |
A sinistra: aghjustate a velocità di riavvolgimentu (1x, 1/2x, 1/4x, 1/8x, ..., 1/64x) Right: aghjustate a velocità di rinviu (1x, 2x, 4x, 8x, ..., 64x) |
 |
A manca: dopu a carica a file, cliccate per ghjucà. Giustu: mentre ghjucava a file, cliccate per mette in pausa. |
 |
Mostra a velocità attuale |
| Mentre carica a file, cliccate per ghjucà à una volta. (Stu buttone sparisce quandu a carica hè cumpleta.) Quandu riceve dati in diretta, cliccate per stream cù una latenza minima. |
Correzione è cunfigurazione
Quandu verificate u nuvola di punti in diretta o riproduce u nuvulu di punti registratu, correzione files è cunfigurazione files pò esse usatu.
5.1 Correction Cloud Point
| Correction d'angle | Corrige i dati di azimut è elevazione. Vede a Sezione 1.3 (Distribuzione di Canali) in u manuale di l'usu di lidar. |
| Correzione Firetime | Per certi mudelli di produttu: corregge l'azimut di i dati di nuvola di punti secondu u tempu di sparu di ogni canali. |
| Correzione di distanza | Per certi mudelli di produttu: corregge i dati di distanza. |
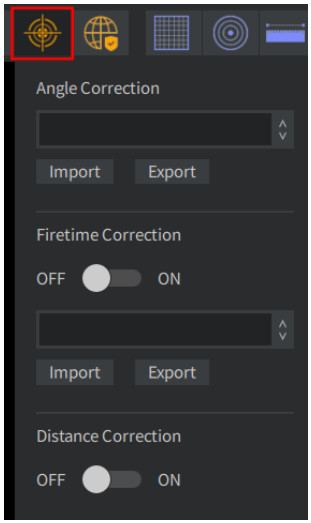
Cliccate ![]() (Correction) in a toolbar:
(Correction) in a toolbar:
| Tipu di currezzione | Descrizzione |
| Correction d'angle | Quandu verificate u nuvulu di punti in diretta: • PandaruView 2 recupera automaticamente a correzione file di sta unità lidar. Durante a riproduzione di nuvola di punti registrata: • PandaruView 2 carica automaticamente a correzione generale file per stu mudellu di pruduttu. • Per megliu visualizazione, cliccate "Importà" è selezziunà a currezzione file di sta unità lidar. |
| Correzione Firetime | QT128C2X: • Quandu cuntrollà nuvola di punti live: PandarView 2 recupera automaticamente a correzione file di sta unità lidar; cambia à ON è cumincianu a correzione. • Quandu ghjucà torna nuvola di punti arregistrata: PandarView 2 carica automaticamente una correzione generale file per stu mudellu di pruduttu; cambia à ON è cumincianu a correzione. Altri mudelli di prudutti: • Cambia à ON, cliccate "Import" è selezziunà a currezzione file di sta unità lidar. • Se a correzione di l'unità lidar file ùn hè micca dispunibule in u locu, cambia à ON è selezziunate una correzione generale file per stu mudellu di produttu in u menù drop-down. |
| Correzione di distanza | Cambia à ON. |
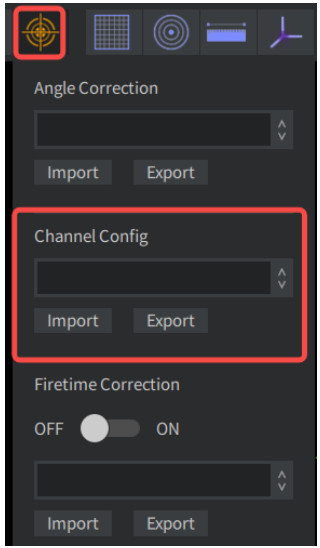
5.2 Cunfigurazione di u Canale
Una cunfigurazione di u canali file selezziunà un subset da tutti i canali dispunibuli di un lidar, definisce u numeru di blocchi in un pacchettu di dati Point Cloud, è specifica i canali per esse guardatu in ogni bloccu.
Solu dispunibule per QT128C2X:
- Quandu verificate u nuvulu di punti in diretta: PandarView 2 recupera automaticamente a cunfigurazione di u canali file di sta unità lidar.
- Quandu si riproduce nuvola di punti arregistrata: cliccate
 (Correction) in a toolbar, cliccate "Import" in a sezione Channel Config, è selezziunate a cunfigurazione di u canali file di sta unità lidar.
(Correction) in a toolbar, cliccate "Import" in a sezione Channel Config, è selezziunate a cunfigurazione di u canali file di sta unità lidar.
5.3 File Importazione è Esporta
File impurtà
- Quandu verificate u nuvola di punti in diretta, u buttone "Export" pò esse usatu per scaricà a correzione o a cunfigurazione files di sta unità lidar.
- Quandu si chjamanu questi files in Ubuntu, assicuratevi di include u fileestensione di nome (.dat per a correzione di l'angulu files di a famiglia AT, è .csv per l'altri).
File esportà
- A correzione o cunfigurazione impurtata files sò aghjuntu à u fondu di u menù drop-down.
- Sì ùn avete più bisognu di quelli files, pudete sguassate da u percorsu seguente (efficace dopu à riavvia PandarView 2): Documenti\PandarViewDatiFiles\csv
Altre caratteristiche
6.1 Shortcuts di u mouse
| Drag Button Left | Girate a nuvola di punti |
| Drag Button Right | Zoom in / out: trascinendu a sinistra per u zoom out, è a diritta per u zoom in |
| Scroll the Wheel | Zoom in / out: scrolling down for zoom out, and up for zooming in |
| Preme a Rota è Drag | Pan u view |
| Shift & Drag Button Manca | Spin the point cloud around the viewing direction (a direzzione da u viewpunta à l'origine di coordenate) |
| Shift & Right-Button Drag | Pan u view |
6.2 Tracce di nuvola di punti
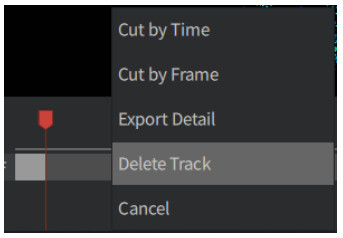
Cliccate cù u dirittu nantu à una traccia di nuvola di punti:
| Tagliatu da u tempu | Specificate l'ora di partenza / fineamps, cut the current track, and save to a new .pcap file. |
| Tagliatu per Frame | Specificate i frames di partenza / fine, tagliate a pista attuale è salvate in un novu .pcap file. |
| Esporta dettagliu | Dopu avè sceltu una zona di punti (vede Sezione 6.3 Toolbar - Selezzione di Puntu è Tabella di Dati), specificate i frames di partenza / fine è esportate i dati di nuvola di punti currispondenti à .csv. files. · Utilizà · Quandu chjamanu questi files in Ubuntu, assicuratevi di include u fileestensione di nome (.csv). |
| Sguassà a pista | Sguassà a traccia attuale. |
| Cancella | Chiudere u menù di clic destro. |
6.3 Toolbar
Se u PandaruView A finestra 2 hè troppu stretta per vede a barra di strumenti in tuttu, scorri a rota di u mouse view tutti i buttoni.
■ Coordenate Grids, Coordinate System, è Misura di distanza 
| Nome di u buttone | Funzione |
| Cartesiane | Mostra / nasconde e griglie cù spazii di 30 m |
| Polari | Mostra / nasconde i circles equidistanti cù spazii di 10 m |
| Regnu | Trascinate u buttone left per misurà a distanza trà dui punti |
| Coordenate | Mostra u sistema di coordenate rettangulari |
■ Modi di prughjezzione

| Nome di u buttone | Funzione |
| Projezzione ortugrafica | – |
| Projezzione di prospettiva | – |
■ Puntu di View è Spinning
| Nome di u buttone | Funzione |
| Fronte / Back / Left / Right / Top | – |
| Spin | Spin the viewing direction (a direzzione da u viewpunta à l'origine di coordenate) intornu à l'asse Z |
■ Selezzione di u canali 
Cliccate ![]() (Canali) à view o cambià i canali attualmente visualizati.
(Canali) à view o cambià i canali attualmente visualizati.
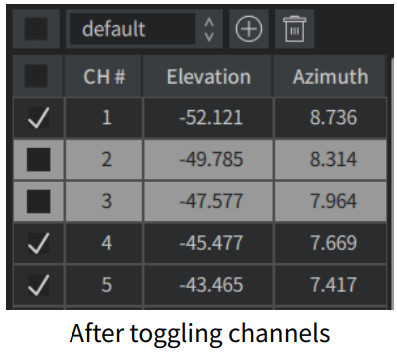
Mostra o oculta i canali
- Verificate / Uncheck e caselle à a manca di ogni canale per vede / oculta i so dati di nuvola di punti.
- Per automaticamente, tutti i canali sò visualizati.
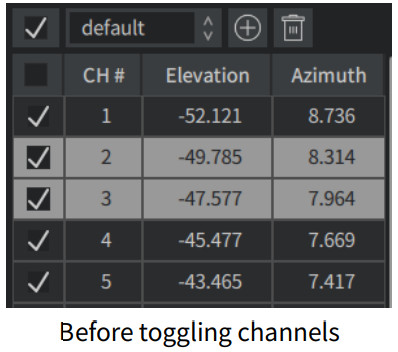
Selezziunate è cambiate i canali
- Cliccate nantu à un canale (escludendu l'area di a so casella di spunta) per selezziunà è mette in risaltu stu canale.
- Mantene premutu Shift mentre cliccate per selezziunà parechji canali vicini.
- Mantene premutu Ctrl mentre cliccate per selezziunà parechji canali separati.
- Cliccate
 (Toggle Selected Channels) in l'angulu in cima à manca per cambià i canali selezziunati trà marcati è micca marcati.
(Toggle Selected Channels) in l'angulu in cima à manca per cambià i canali selezziunati trà marcati è micca marcati.
Salvà i gruppi di canali
- Cliccate
 per salvà i canali verificati cum'è una cunfigurazione è u nome.
per salvà i canali verificati cum'è una cunfigurazione è u nome. - E cunfigurazioni salvate in precedenza esistenu dopu avè riavviatu PandarView 2 è pò esse sceltu in u
 menu a discesa.
menu a discesa. - Per sguassà a cunfigurazione attualmente selezziunata, cliccate
 .
.
■ Selezzione Puntu è Tavola Dati
Cliccate ![]() (Selezziunate) è trascinate u mouse per evidenziare una zona di punti.
(Selezziunate) è trascinate u mouse per evidenziare una zona di punti.
Cliccate ![]() (Spread Sheet) à view i dati di i punti evidenziati, cum'è mostra sottu.
(Spread Sheet) à view i dati di i punti evidenziati, cum'è mostra sottu. 
Quandu fate un doppiu clicu nantu à un intestazione di u campu parechje volte, e seguenti azzioni sò eseguite una per volta:
- Adatta a larghezza di a colonna à u nome di u campu
(In alternativa, mette u cursore di u mouse trà dui intestazioni in modu chì u cursore diventa una freccia sinistra-destra; arrastate u mouse per aghjustà a larghezza di a colonna). - Ordine stu campu per ordine crescente. Una freccia su
 apparirà à a diritta.
apparirà à a diritta. - Ordine stu campu in ordine decrescente. Una freccia giù
 apparirà à a diritta.
apparirà à a diritta. - Cancella u sorta.
U gruppu di buttone in l'angulu superiore manca:

| Selezziunà tuttu | Cliccate per vede i dati di tutti i punti in questu quadru. Cliccate di novu per vede solu i dati di i punti selezziunati. |
| Export Points Info | Esporta a tabella di dati attuale à un .csv file. |
| Salvà l'Ordine di Colonna | Salvà l'ordine di campu attuale. Questa paràmetra resta efficace dopu à riavvia PandarView 2. |
I campi in a tabella di dati sò definiti quì sottu:
| Ch | Canale # |
| AziCorr | Azimut currettu da a currezzione di l'angulu file |
| Dist | Distanza |
| Rfl | Riflettività |
| Azi | Azimut (angolo di riferimentu attuale di u rotore) |
| Ele | Elevazione |
| t | Timestamp |
| Campu | Per i mudelli di prudutti di a famiglia AT: a Superficie Mirror nantu à quale sta misurazione hè fatta. I campi 1/2/3 currispondenu à e superfici di specchiu 0/1/2, rispettivamente. |
| AziState | Statu Azimuth Adupratu per calculà l'offset di u tempu di sparu di ogni canale; solu per certi mudelli lidar. |
| cunfidenza | Confidenza |
■ Altri cuntrolli Display 
| Nome di u buttone | Funzione |
| Filtru | Definite a gamma di visualizazione di nuvola di punti. |
| Laser Tracing | Mostra i raggi laser di sta unità lidar. |
| Informazioni di u Statu | Mostra l'infurmazioni di statutu à u cantonu in fondu à manca di l'area di visualizazione di a nuvola di punti, cum'è Velocità di u Motore, Modu di Ritornu, è u nome di u .PCAP. file. |
| Dump PCD | Dump the current frame in a .pcd (Point Cloud Data) file et préciser file locu. |
| Mappa di culore | Definite u schema di culori di a visualizazione di nuvola di punti. |
| Dimensione di u puntu | Definite a dimensione di visualizazione di i punti di dati. |
| Modu di ritornu | Selezziunate i ritorni per esse affissati. |
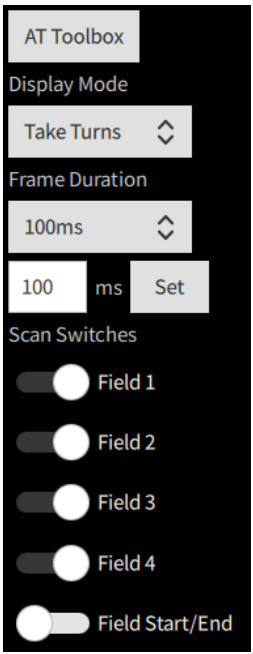
■ AT Family Toolbox
Per mudelli di prudutti chì appartenenu à a famiglia AT. 
| Modu di visualizazione | Pigliate turni (default): e misurazioni da Mirror Surfaces 0/1/2 sò rimesse à Frames 0/1/2, rispettivamente. I frames ùn sò micca cuciti. Cumminazione: e misurazioni da Mirror Surfaces 0/1/2 sò eseguite in un quadru. Questu hè, trè frames sò cuciti cum'è unu. Tradizione: e misurazioni da Mirror Surfaces 0/1/2 sò prudutte à un quadru secondu i so anguli di codificatori in Point Cloud Data Packets. Nisuna correzione d'angolo hè realizatu. |
| Durata di u quadru | Finestra di tempu per a visualizazione di nuvola di punti In u modu play-by-time (vede Section 4.2 Play Control), tutti i punti di dati in questa finestra di u tempu seranu visualizati. |
| Scan Switches | Per vede o ammuccià e misure da ogni superficia di specchiu. I campi 1/2/3 currispondenu à e superfici di specchiu 0/1/2, rispettivamente. U campu 4 ùn hè micca usatu. |
| Campu Start / Fine | Ùn hè ancu supportatu |
Risoluzione di prublemi
In casu chì e seguenti prucedure ùn ponu micca risolve u prublema, cuntattate l'assistenza tecnica Hesai.
| Sintomi | Punti da verificà |
| U mutore Lidar hè in funzione, ma ùn sò ricevuti dati di output, nè in Wireshark nè in PandarView. | Verificate chì: · U cable Ethernet hè cunnessu currettamente (sconnettendu è chjappà di novu); · L'IP di destinazione di Lidar hè stallatu currettamente in a pagina di Settings di web cuntrollu; · FOV horizontale hè stallatu bè nantu à a pagina Azimuth FOV di web cuntrollu; · A versione di firmware di u sensoru hè correttamenti indicata nantu à a pagina Upgrade di web cuntrollu; · Lidar emette luce laser. Questu pò esse verificatu cù una camera infrared, una carta di sensore infrared, o una camera di telefuninu senza filtru infrared. Accendete di novu per verificà se u sintumu persiste. |
| Pò riceve dati nantu à Wireshark ma micca in PandarView. | Verificate chì: · u Portu di Destinazione Lidar hè stallatu currettamente in a pagina Settings di web cuntrollu · Firewall di PC hè disattivatu, o chì PandarView hè aghjuntu à l'eccezzioni firewall · se VLAN hè attivatu, l'ID VLAN di u PC hè u listessu cù u lidar · l'ultime PandarView versione (vede a pagina di scaricamentu di l'ufficiale di Hesai websitu o cuntattate l'assistenza tecnica Hesai) hè stallatu nantu à u PC Accendete di novu per verificà se u sintumu persiste. |
Appendice I Avvisu Legale
Copyright 2021 da Hesai Technology. Tutti i diritti riservati. L'usu o a ripruduzzione di stu manuale in parti o in tuttu senza l'autorizazione di Hesai hè pruibita.
Hesai Technology ùn face alcuna rapprisintazioni o garanzie, sia espresse sia implicite, in quantu à u cuntenutu di questu quì, è declina specificamente qualsiasi garanzie, cummerciabilità o idoneità per qualsiasi scopu particulare. In più, Hesai Technology si riserva u dirittu di rivisà sta publicazione è di fà cambiamenti di volta in volta in u cuntenutu di questu senza l'obbligazione di avvisà alcuna persona di tali rivisioni o cambiamenti.
HESAI è u logo HESAI sò marchi registrati di Hesai Technology. Tutti l'altri marchi, marchi di serviziu, è nomi di cumpagnie in stu manuale o nantu à l'ufficiale di Hesai websitu sò pruprietà di i so rispettivi pruprietarii.
U software inclusu in stu pruduttu cuntene copyright chì hè registratu sottu Hesai Technology. Ogni terzu ùn hè micca permessu, salvu cum'è espressamente permessu da u licenziatore o espressamente dumandatu da a lege applicabile, per decompilà, ingegneria inversa, disassemble, mudificà, affittu, affittu, prestitu, distribuisce, sublicenzià, creà opere derivate basate in tuttu o in parte. di u software.
Hesai Product Warranty Service Manual hè nantu à a pagina di a Politica di Garanzia di l'ufficiale di Hesai websitu: https://www.hesaitech.com/en/legal/warranty
Hesai Technology Co., Ltd.
Telefono: +86 400 805 1233
Websitu: www.hesaitech.com
Indirizzu: Building L2, Hongqiao World Center, Shanghai, Cina
E-mail cummerciale: info@hesaitech.com
E-mail di serviziu: service@hesaitech.com