Elektor Arduino 控制繪圖機器人
產品規格
- Arduino控制的繪圖機器人
- 成分:
- Arduino Nano – 5
- 奈米盾 – 1
- 藍牙模組 - 1
- 伺服器 – 3
- 電纜 – 4
- 螺絲:
- M2X8 – 6
- M2.5×6 – 2
- M3x6 – 2
- M3x8 – 15
- M3x10 – 3
- M3x12 – 6
- M3x16 – 2
- 堅果:
- M2 – 6
- M3 – 29
- 墊片:
- M3 – 2
- 墊片:
- 黑色尼龍 M3x2 – 5
- M3x9 – 2
- 附加元件:
- 彈簧 5×0.4×6 – 1
- 軸承 M3x8 – 2
產品使用說明
步驟 1:安裝奈米擴充屏蔽
首先,使用 8 個 M3X8 螺絲和 4 個 M3X2 墊片在所示位置安裝 Nano 擴充屏蔽。
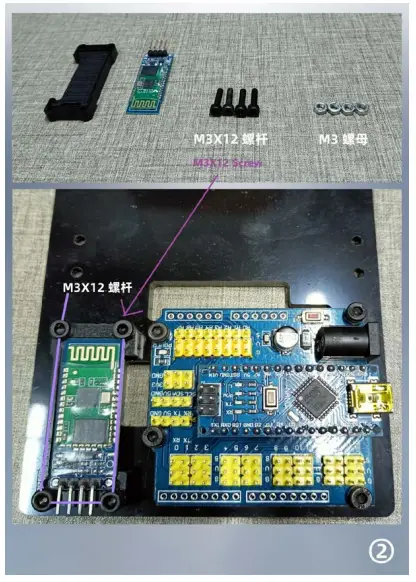
步驟2:安裝藍牙模組
然後用 4 個帶螺母的 M3X12 螺絲安裝藍牙模組。
成分
螺絲
- M2X8 —6
- M2.5×6 —2
- M3x6 —2
- M3x8—15
- M3x10—3
- M3x12—6
- M3x16—2
堅果
- M2 —6
- M3 —29
墊片
- M3 —2
黑色尼龍墊片
- M3x2 —5
- M3x9 —2
泉
- 5×0.4×6 —1
軸承
- M3x8 —2
- Arduino Nano —5
- 奈米盾 —1
- 藍牙模組 —1
- 伺服器 —3
- 電纜 —4
安裝說明
步驟1
- 首先,使用 8 個 M3X8 螺絲和 4 個 M3X2 墊片在所示位置安裝 Nano 擴充屏蔽

步驟2
- 然後用 4 個 M3X12 螺絲和螺母安裝藍牙模組
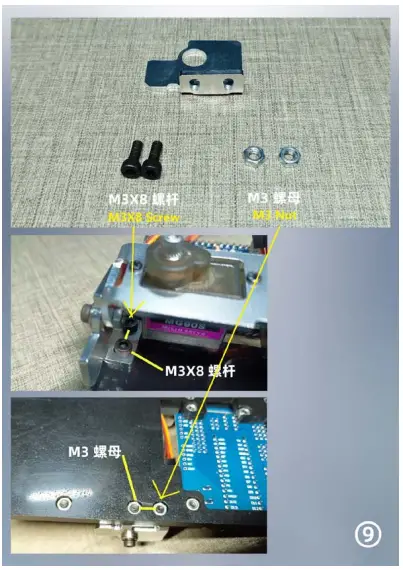
步驟3
- 然後用 2 個 M3X8 螺絲和螺母安裝支架

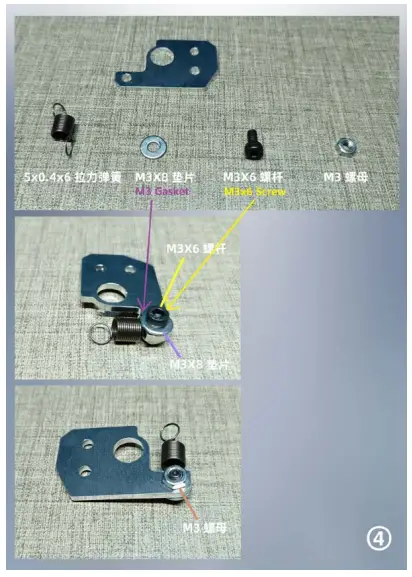
步驟4
- 將此臂與回位彈簧組裝在一起
步驟5
- 把它們全部放到支架上

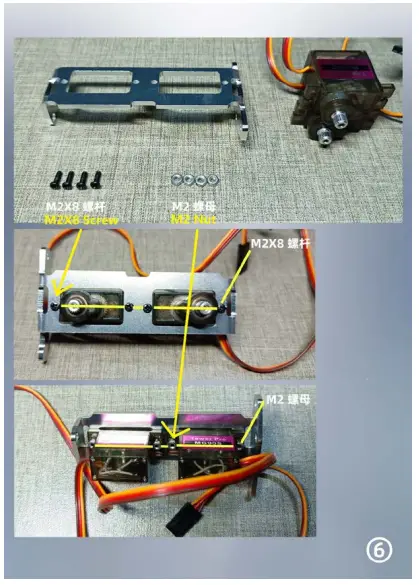
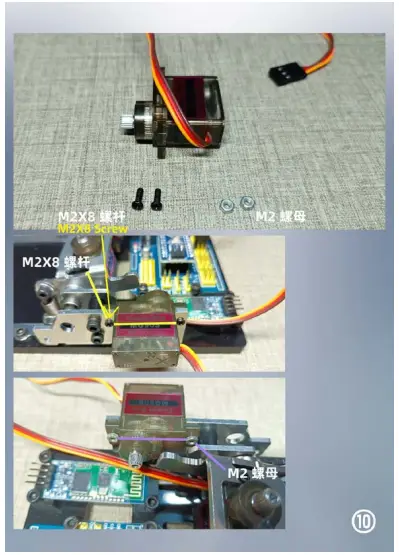
步驟6
- 現在組裝2個伺服器,附M2X8螺絲和螺母
步驟7
- 在結構上添加軸承
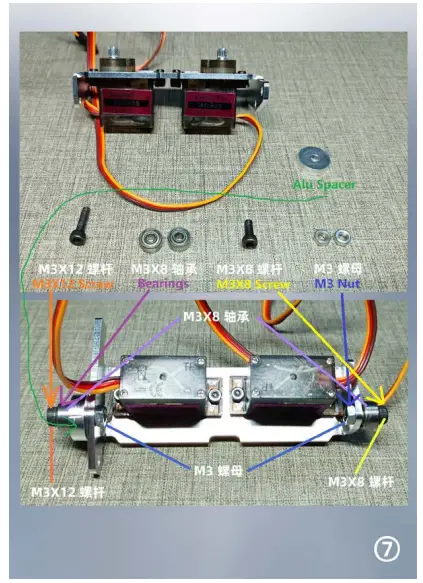
步驟8
- 將有伺服器的框架連接到回位彈簧
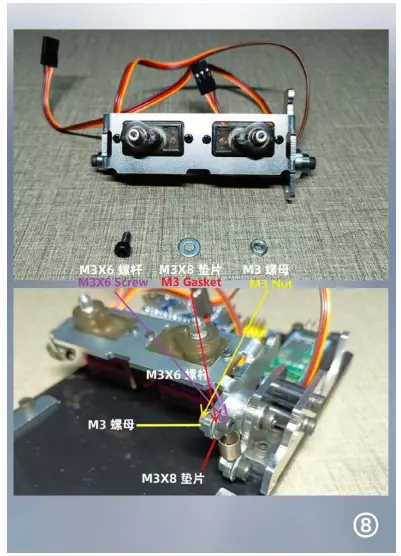
步驟9
- 安裝另一個底座支架,並將其連接到伺服框架
步驟10
- 安裝最後一個服務器
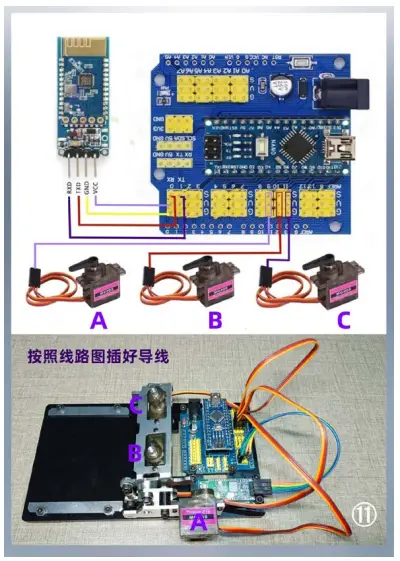
步驟11
- 如圖所示,將 3 個舵機連接到 Nano 擴充板
步驟12
- 開啟電源,等待舵機停止轉動,然後關閉電源
- 如圖所示,水平安裝伺服臂

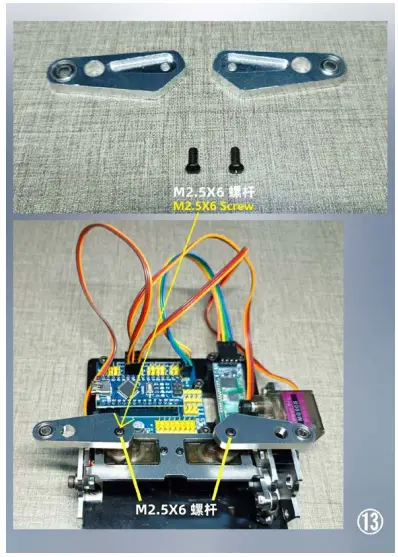
步驟13
- 使用 M2X2.5 螺絲安裝 6 個機械手臂
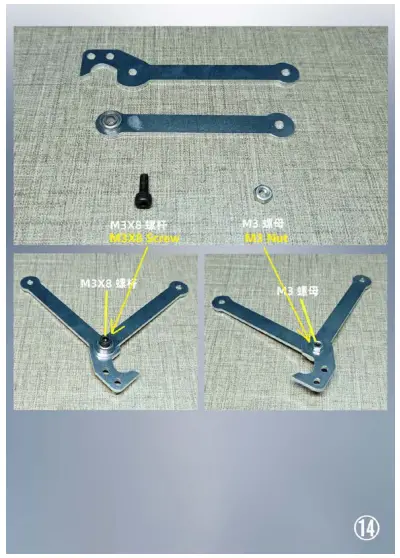
步驟14
- 和M3螺絲
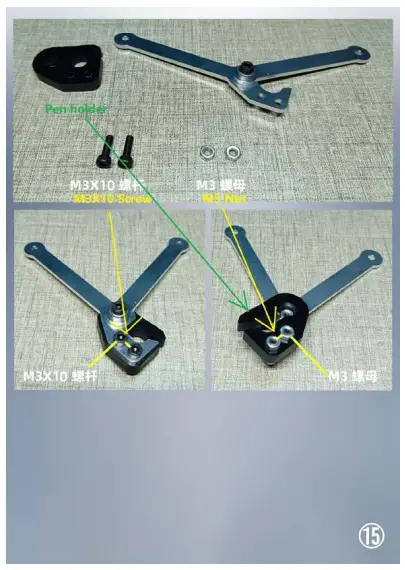
步驟15
- 安裝筆架
步驟16
- 將所有東西放在一起,完成組裝

常見問題解答
Q:如何啟動繪圖機器人?
A: 打開機器人電源,等待伺服器停止轉動,然後關閉電源。
Q:如何將伺服器連接到 Nano 擴充板?
A: 按照手冊中提供的圖片所示,將 3 個伺服器連接到 Nano 擴充板。
文件/資源
 |
Elektor Arduino 控制繪圖機器人 [pdf] 安裝指南 Arduino控制繪圖機器人,控制繪圖機器人,繪圖機器人,機器人 |