หุ่นยนต์วาดภาพควบคุมด้วย Arduino จาก Elektor
ข้อมูลจำเพาะผลิตภัณฑ์
- หุ่นยนต์วาดภาพควบคุมด้วย Arduino
- ส่วนประกอบ:
- อาร์ดูอิโนนาโน – 5
- นาโนชิลด์ – 1
- โมดูลบลูทูธ – 1
- เซอร์โว – 3
- สายเคเบิล – 4
- สกรู:
- M2X8 – 6
- ม2.5×6 – 2
- M3x6 – 2
- M3x8 – 15
- M3x10 – 3
- M3x12 – 6
- M3x16 – 2
- ถั่ว:
- M2 – 6
- M3 – 29
- ปะเก็น:
- M3 – 2
- สเปเซอร์:
- ไนลอนสีดำ M3x2 – 5
- M3x9 – 2
- ส่วนประกอบเพิ่มเติม:
- สปริง 5×0.4×6 – 1
- ตลับลูกปืน M3x8 – 2
คำแนะนำการใช้ผลิตภัณฑ์
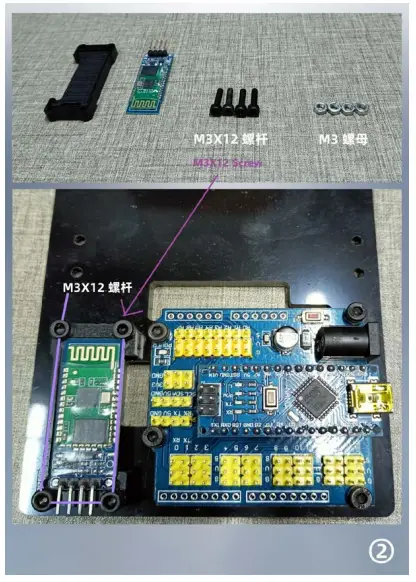
ขั้นตอนที่ 1: ติดตั้ง Nano Expansion Shield
ขั้นแรก ติดตั้งชิลด์ขยาย Nano ด้วยสกรู M8X3 8 ตัวและสเปเซอร์ M4X3 2 ตัวในตำแหน่งที่แสดง
ขั้นตอนที่ 2: ติดตั้งโมดูลบลูทูธ
จากนั้นติดตั้งโมดูลบลูทูธด้วยสกรู M4X3 จำนวน 12 ตัวพร้อมน็อต
ส่วนประกอบ
สกรู
- M2X8 —6
- ม2.5×6 —2
- M3x6 —2
- M3x8—15
- M3x10—3
- M3x12—6
- M3x16—2
ถั่ว
- ม2-6
- ม3-29
ปะเก็น
- ม3-2
สเปเซอร์ ไนลอนสีดำ
- M3x2 —5
- M3x9 —2
สปริงส์
- 5×0.4×6 —1
ตลับลูกปืน
- M3x8 —2
- อาร์ดูอิโนนาโน —5
- นาโนชิลด์ —1
- โมดูลบลูทูธ —1
- เซอร์โว —3
- สายเคเบิล —4
คำแนะนำการติดตั้ง
ขั้นตอนที่ 1
- ขั้นแรก ติดตั้งชิลด์ขยายนาโนด้วยสกรู M8X3 8 ตัวและสเปเซอร์ M4X3 2 ตัวในตำแหน่งที่แสดง

ขั้นตอนที่ 2
- จากนั้นติดตั้งโมดูลบลูทูธด้วยสกรู M4X3 จำนวน 12 ตัวพร้อมน็อต
ขั้นตอนที่ 3
- จากนั้นติดตั้งวงเล็บด้วยสกรู M2X3 8x พร้อมน็อต

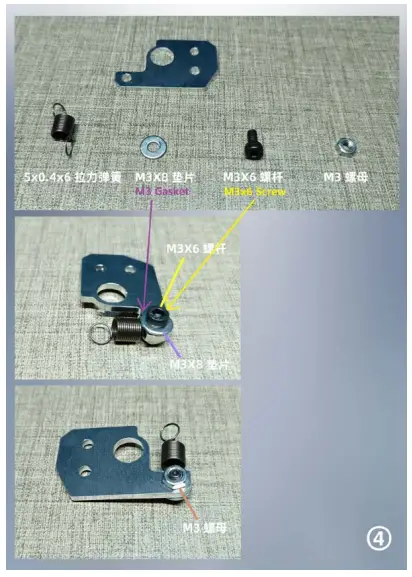
ขั้นตอนที่ 4
- ประกอบแขนนี้เข้ากับสปริงคืนตัว
ขั้นตอนที่ 5
- นำทั้งหมดมาใส่รวมกันในวงเล็บ

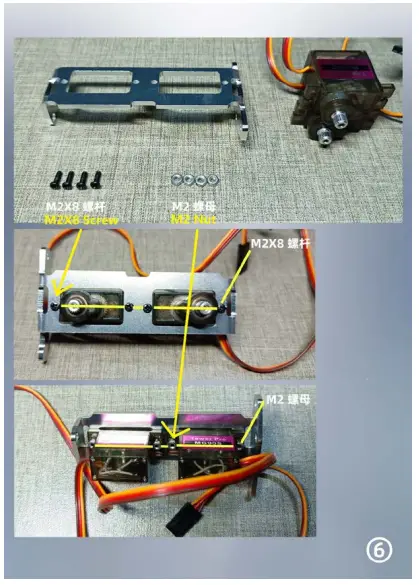
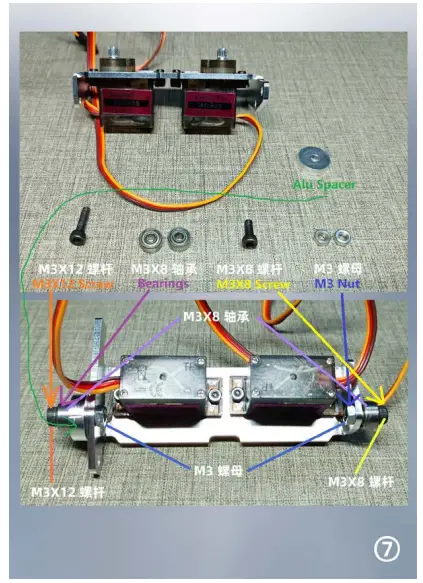
ขั้นตอนที่ 6
- ตอนนี้ประกอบเซอร์โว 2 ตัวด้วยสกรู M2X8 และน็อต
ขั้นตอนที่ 7
- เพิ่มตลับลูกปืนให้กับการก่อสร้าง
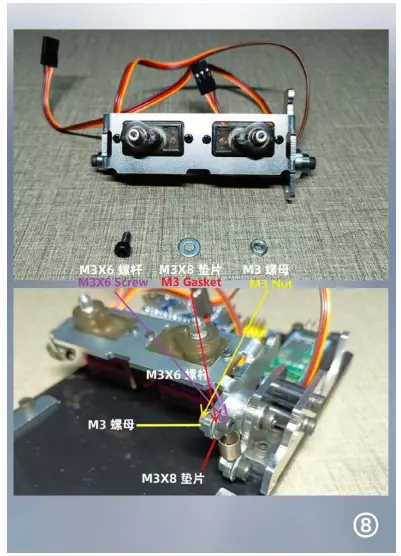
ขั้นตอนที่ 8
- เชื่อมต่อเฟรมพร้อมเซอร์โวเข้ากับสปริงส่งกลับ
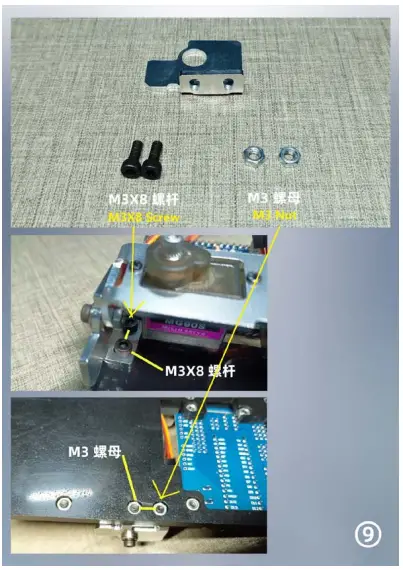
ขั้นตอนที่ 9
- ติดตั้งฐานยึดด้านบน และเชื่อมต่อกับเฟรมเซอร์โว
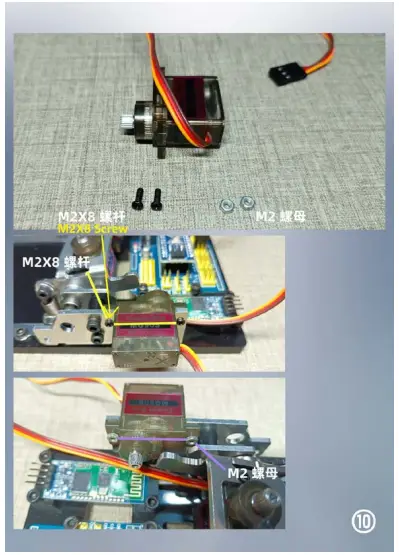
ขั้นตอนที่ 10
- ติดตั้งเซอร์โวตัวสุดท้าย
ขั้นตอนที่ 11
- เชื่อมต่อเซอร์โว 3 ตัวเข้ากับชิลด์ขยายนาโนตามภาพที่แสดง
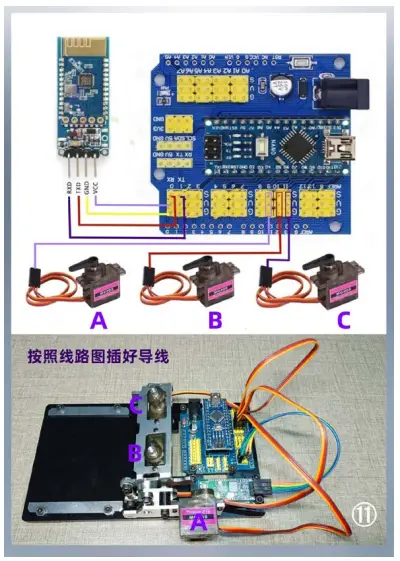
ขั้นตอนที่ 12
- เปิดเครื่องแล้วรอจนกว่าเซอร์โวจะหยุดหมุน จากนั้นจึงปิดเครื่อง
- ติดตั้งแขนเซอร์โวในแนวนอนตามภาพที่แสดง

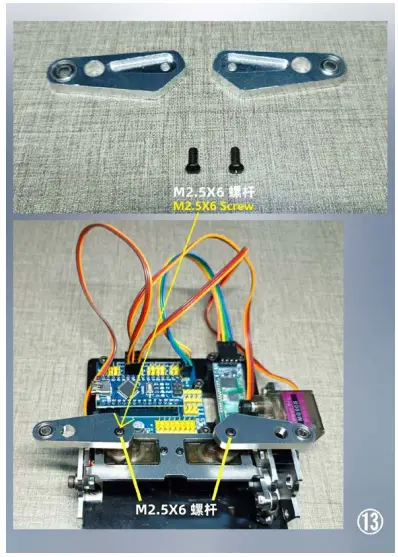
ขั้นตอนที่ 13
- ติดตั้งแขนหุ่นยนต์ 2 ตัวด้วยสกรู M2.5X6
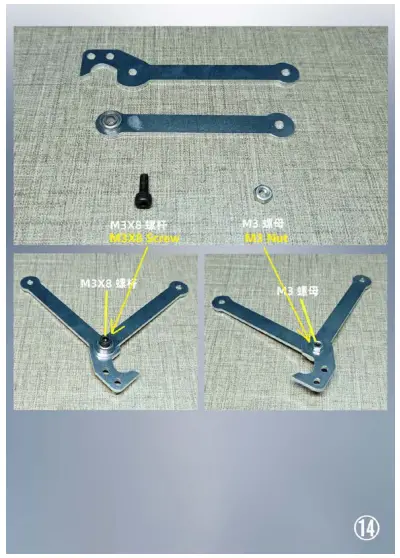
ขั้นตอนที่ 14
- และสกรู M3
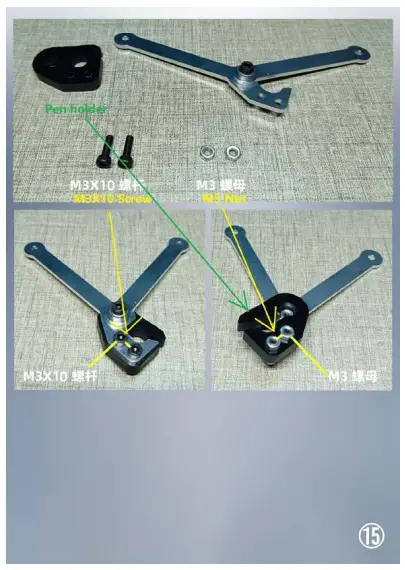
ขั้นตอนที่ 15
- ติดตั้งที่ใส่ปากกา
ขั้นตอนที่ 16
- นำทุกอย่างมาประกอบเข้าด้วยกันจนเสร็จ

คำถามที่พบบ่อย
ถาม: ฉันจะเปิดหุ่นยนต์วาดรูปได้อย่างไร?
A: เปิดหุ่นยนต์และรอจนกว่าเซอร์โวจะหยุดหมุน จากนั้นจึงปิดเครื่อง
ถาม: ฉันจะเชื่อมต่อเซอร์โวเข้ากับชิลด์ขยายนาโนได้อย่างไร
A: เชื่อมต่อเซอร์โว 3 ตัวเข้ากับชิลด์ขยายนาโนตามที่แสดงในภาพที่จัดทำไว้ในคู่มือ
เอกสาร / แหล่งข้อมูล
 |
หุ่นยนต์วาดภาพควบคุมด้วย Arduino จาก Elektor [พีดีเอฟ] คู่มือการติดตั้ง หุ่นยนต์วาดภาพควบคุมด้วย Arduino, หุ่นยนต์วาดภาพควบคุม, หุ่นยนต์วาดภาพ, หุ่นยนต์ |