इलेक्टोर आर्डुइनो नियंत्रित ड्राइंग रोबोट
उत्पाद विनिर्देश
- Arduino नियंत्रित ड्राइंग रोबोट
- अवयव:
- आर्डुइनो नैनो – 5
- नैनो शील्ड – 1
- ब्लूटूथ मॉड्यूल – 1
- सर्वो – 3
- केबल्स – 4
- पेंच:
- एम2X8 – 6
- एम2.5×6 – 2
- एम3x6 – 2
- एम3x8 – 15
- एम3x10 – 3
- एम3x12 – 6
- एम3x16 – 2
- मेवे:
- एम2 – 6
- एम3 – 29
- गास्केट:
- एम3 – 2
- स्पेसर:
- काला नायलॉन M3x2 – 5
- एम3x9 – 2
- अतिरिक्त घटक:
- स्प्रिंग्स 5×0.4×6 – 1
- बियरिंग्स M3x8 – 2
उत्पाद उपयोग निर्देश
चरण 1: नैनो एक्सपेंशन शील्ड स्थापित करें
सबसे पहले, दिखाए गए स्थान पर 8x M3X8 स्क्रू और 4x M3X2 स्पेसर के साथ नैनो विस्तार शील्ड स्थापित करें।
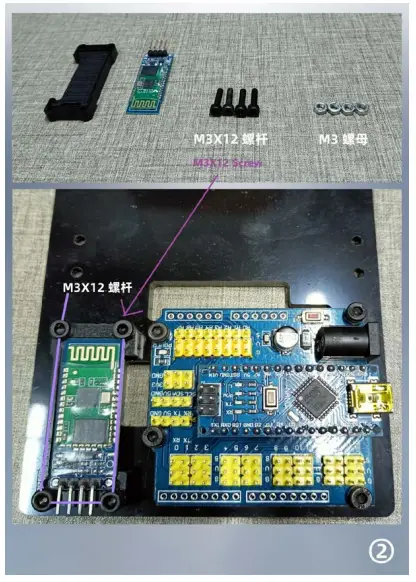
चरण 2: ब्लूटूथ मॉड्यूल स्थापित करें
फिर ब्लूटूथ मॉड्यूल को 4x M3X12 स्क्रू और नट के साथ स्थापित करें।
अवयव
शिकंजा
- एम2X8 —6
- एम2.5×6 —2
- एम3x6 —2
- एम3x8—15
- एम3x10—3
- एम3x12—6
- एम3x16—2
पागल
- एम2 —6
- एम3 —29
गैस्केट
- एम3 —2
स्पेसर्स काले नायलॉन
- एम3x2 —5
- एम3x9 —2
स्प्रिंग्स
- 5×0.4×6 —1
बीयरिंग
- एम3x8 —2
- आर्डुइनो नैनो —5
- नैनो शील्ड —1
- ब्लूटूथ मॉड्यूल —1
- सर्वो —3
- केबल्स —4
स्थापना निर्देश
स्टेप 1
- सबसे पहले, नैनो एक्सपेंशन शील्ड को 8x M3X8 स्क्रू और 4x M3X2 स्पेसर के साथ दिखाए गए स्थान पर स्थापित करें

स्टेप 2
- फिर ब्लूटूथ मॉड्यूल को 4x M3X12 स्क्रू और नट के साथ स्थापित करें
स्टेप 3
- फिर नट के साथ 2x M3X8 स्क्रू के साथ ब्रैकेट स्थापित करें

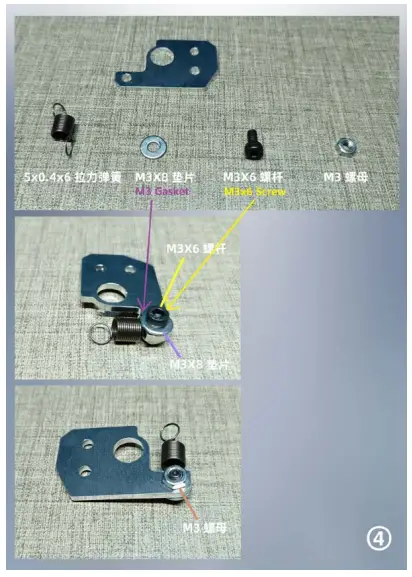
स्टेप 4
- इस भुजा को रिटर्न स्प्रिंग के साथ जोड़ें
स्टेप 5
- उन सभी को एक साथ ब्रैकेट में रखें

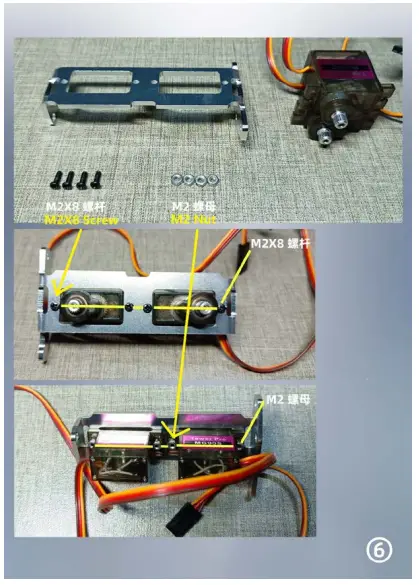
स्टेप 6
- अब M2X2 स्क्रू और नट के साथ 8 सर्वो की असेंबली करें
स्टेप 7
- निर्माण में बियरिंग जोड़ें
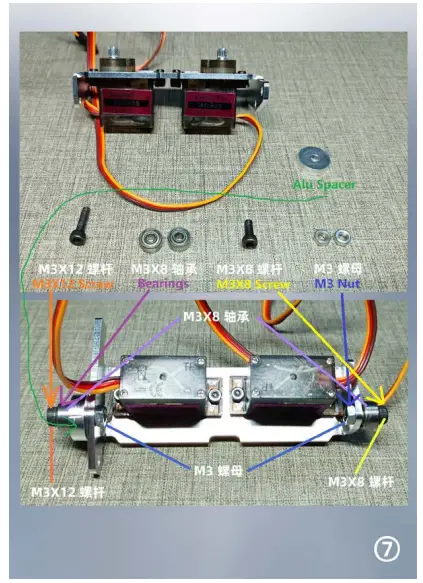
स्टेप 8
- फ्रेम को सर्वो के साथ रिटर्न स्प्रिंग से कनेक्ट करें
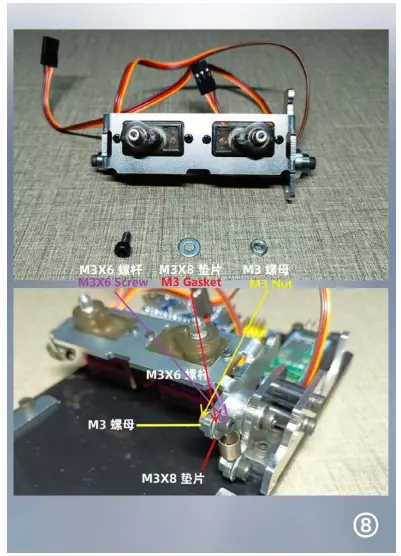
स्टेप 9
- एक अन्य बेस ब्रैकेट स्थापित करें, और इसे सर्वो फ्रेम से कनेक्ट करें
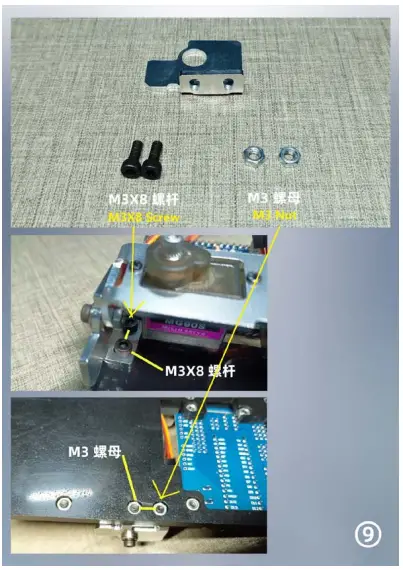
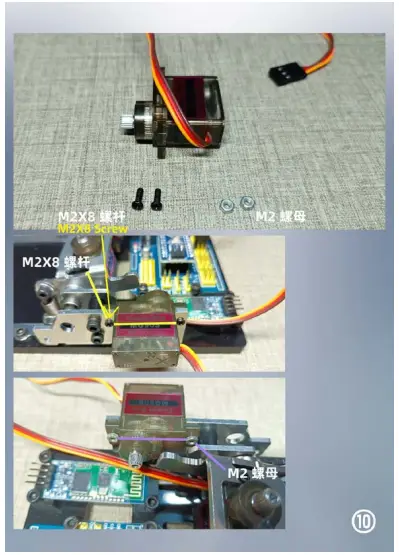
स्टेप 10
- अंतिम सर्वो स्थापित करें
स्टेप 11
- 3 सर्वो को नैनो विस्तार शील्ड से कनेक्ट करें जैसा कि चित्र में दिखाया गया है
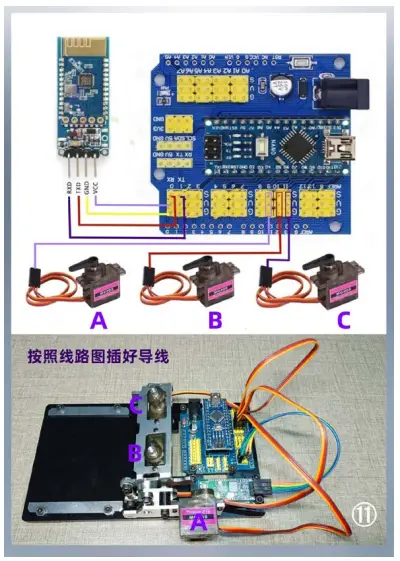
स्टेप 12
- बिजली चालू करें, और तब तक प्रतीक्षा करें जब तक सर्वो घूमना बंद न कर दें, फिर बिजली बंद कर दें
- चित्रों में दिखाए अनुसार सर्वो आर्म्स को क्षैतिज रूप से स्थापित करें

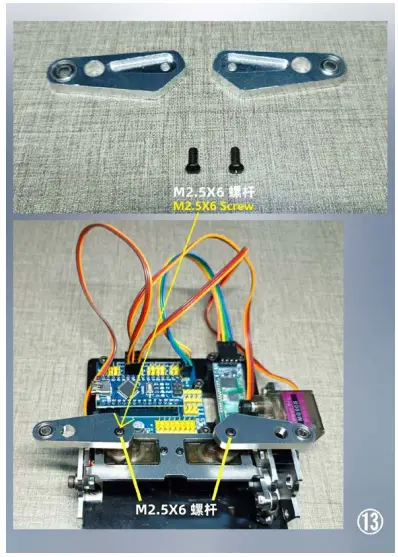
स्टेप 13
- M2X2.5 स्क्रू के साथ 6 रोबोट आर्म्स स्थापित करें
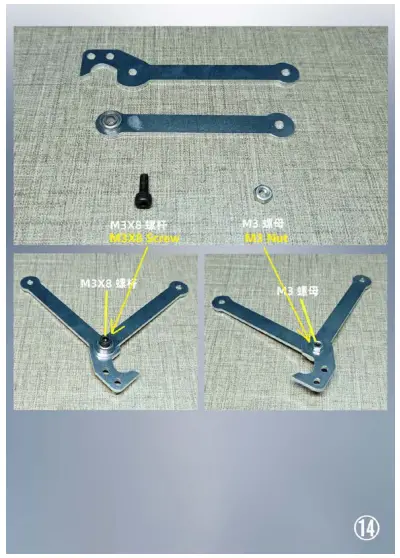
स्टेप 14
- और M3 स्क्रू
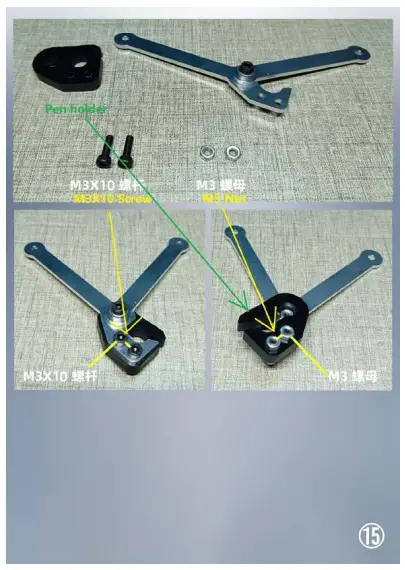
स्टेप 15
- पेन होल्डर स्थापित करें
स्टेप 16
- यह सब एक साथ रखें, और संयोजन समाप्त करें

अक्सर पूछे जाने वाले प्रश्नों
प्रश्न: मैं ड्राइंग रोबोट को कैसे चालू करूँ?
A: रोबोट को चालू करें और तब तक प्रतीक्षा करें जब तक सर्वो घूमना बंद न कर दें, फिर बिजली बंद कर दें।
प्रश्न: मैं सर्वो को नैनो विस्तार शील्ड से कैसे जोड़ूं?
A: मैनुअल में दिए गए चित्र में दिखाए अनुसार 3 सर्वो को नैनो विस्तार शील्ड से जोड़ें।
दस्तावेज़ / संसाधन
 |
इलेक्टोर आर्डुइनो नियंत्रित ड्राइंग रोबोट [पीडीएफ] इंस्टालेशन गाइड Arduino नियंत्रित ड्राइंग रोबोट, नियंत्रित ड्राइंग रोबोट, ड्राइंग रोबोट, रोबोट |