Elektor Arduino 제어 드로잉 로봇
제품 사양
- 아두이노로 제어되는 드로잉 로봇
- 구성 요소:
- 아두이노 나노 – 5
- 나노 실드 - 1
- 블루투스 모듈 – 1
- 서보 – 3
- 케이블 – 4
- 나사:
- M2X8 – 6
- M2.5×6 – 2
- M3x6 – 2
- M3x8 – 15
- M3x10 – 3
- M3x12 – 6
- M3x16 – 2
- 견과류:
- M2 – 6
- M3 – 29
- 개스킷 :
- M3 – 2
- 스페이서:
- 검정색 나일론 M3x2 – 5
- M3x9 – 2
- 추가 구성 요소:
- 스프링 5×0.4×6 – 1
- 베어링 M3x8 – 2
제품 사용 지침
1단계: 나노 확장 실드 설치
먼저, 표시된 위치에 8개의 M3X8 나사와 4개의 M3X2 스페이서를 사용하여 나노 확장 실드를 설치합니다.
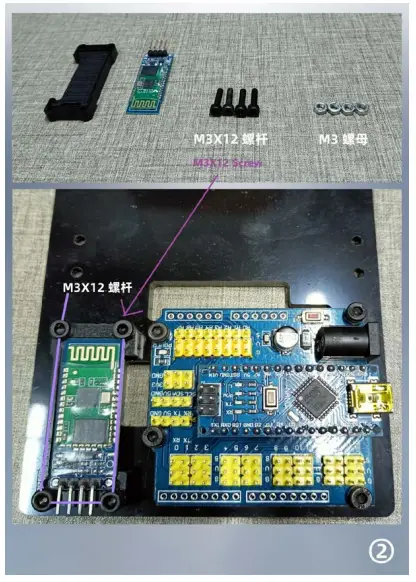
2단계: Bluetooth 모듈 설치
그런 다음 너트가 달린 M4X3 나사 12개를 사용하여 Bluetooth 모듈을 설치합니다.
구성 요소
나사
- M2X8 —6
- M2.5×6 —2
- M3x6 —2
- M3x8—15
- M3x10—3
- M3x12—6
- M3x16—2
견과류
- M2 —6
- M3 —29
개스킷
- M3 —2
스페이서 블랙 나일론
- M3x2 —5
- M3x9 —2
스프링스
- 5×0.4×6 —1
문장
- M3x8 —2
- 아두이노 나노 —5
- 나노 실드 —1
- 블루투스 모듈 —1
- 서보 —3
- 케이블 —4
설치 지침
1단계
- 먼저 표시된 위치에 8개의 M3X8 나사와 4개의 M3X2 스페이서를 사용하여 나노 확장 실드를 설치합니다.

2단계
- 그런 다음 너트가 있는 4개의 M3X12 나사로 Bluetooth 모듈을 설치합니다.
3단계
- 그런 다음 너트가 있는 2x M3X8 나사로 브래킷을 설치합니다.

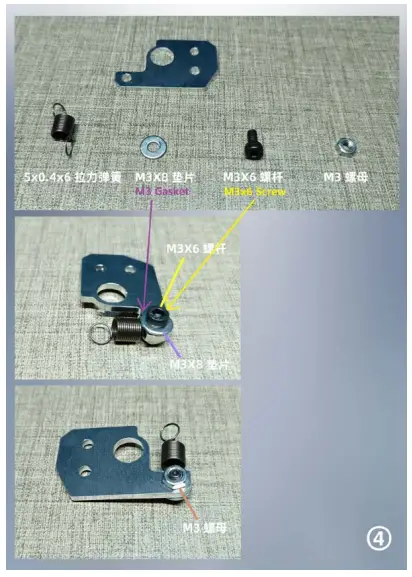
4단계
- 이 팔을 복귀 스프링으로 조립합니다.
5단계
- 모두 대괄호에 모아 놓으세요

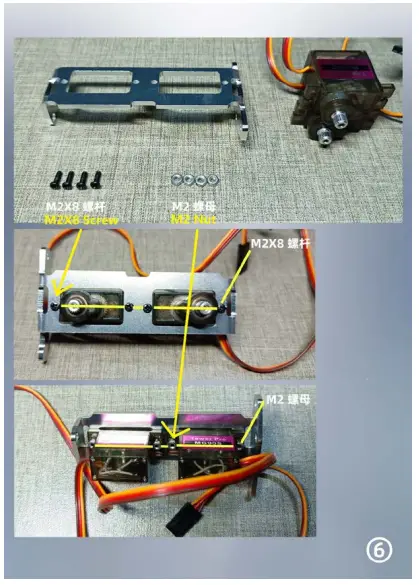
6단계
- 이제 M2X2 나사와 너트로 8개의 서보를 조립합니다.
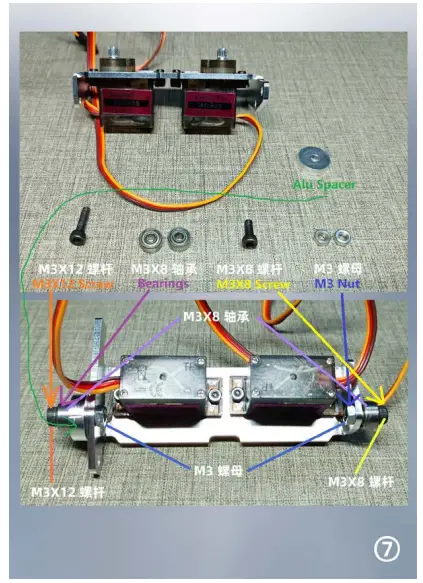
7단계
- 건설에 베어링을 추가하세요
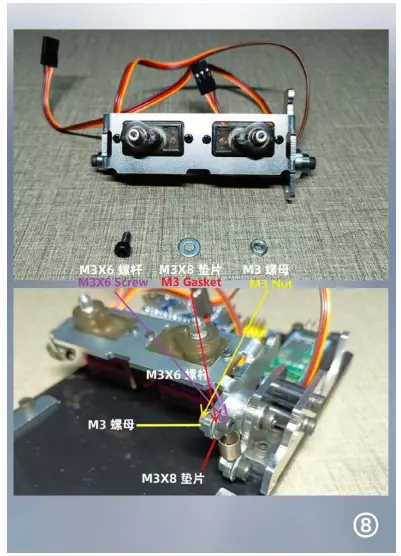
8단계
- 프레임과 서보를 리턴 스프링에 연결합니다.
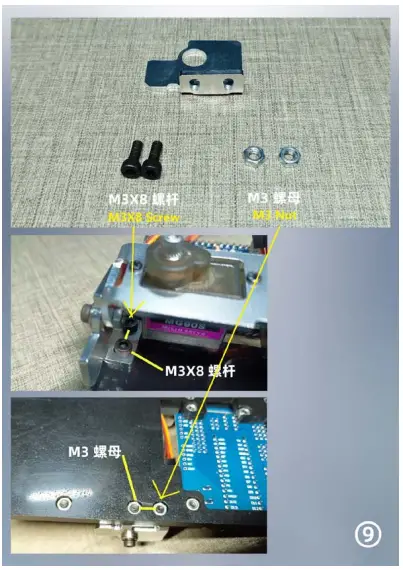
9단계
- 다른 베이스 브라켓을 설치하고 서보 프레임에 연결합니다.
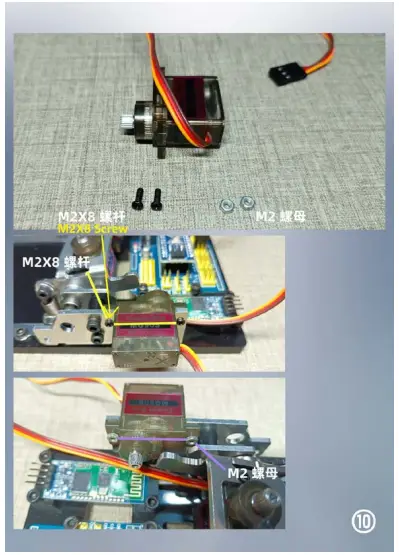
10단계
- 마지막 서보를 설치하세요
11단계
- 그림과 같이 나노 확장 쉴드에 3개의 서보를 연결합니다.
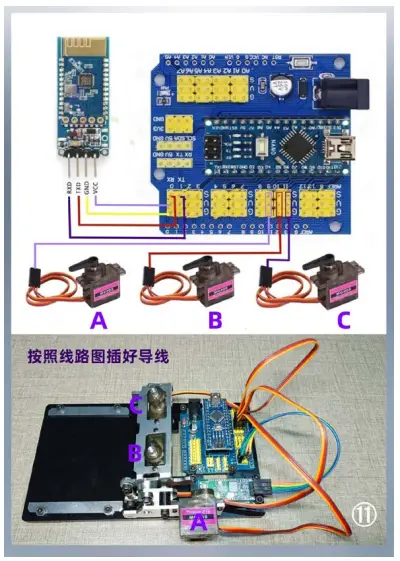
12단계
- 전원을 켜고 서보가 회전을 멈출 때까지 기다린 후 전원을 끕니다.
- 그림과 같이 서보 암을 수평으로 설치하세요.

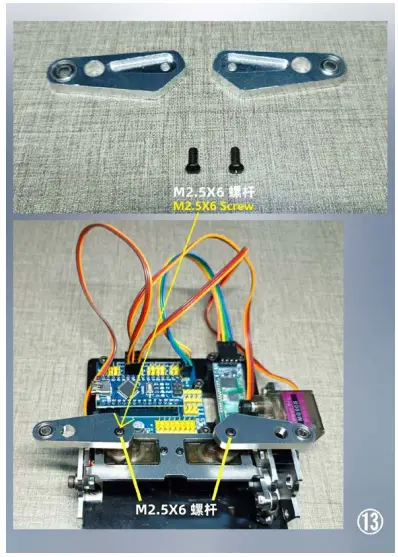
13단계
- M2X2.5 나사로 로봇 팔 6개를 설치합니다.
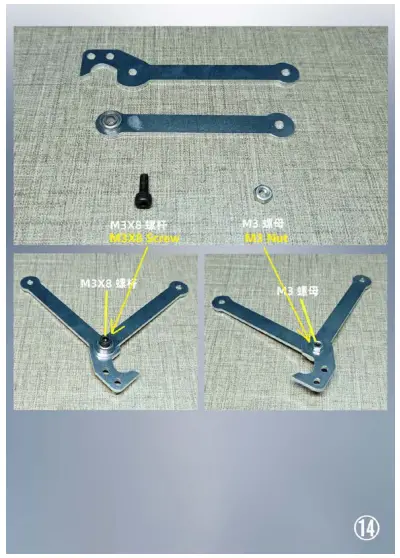
14단계
- 그리고 M3 나사
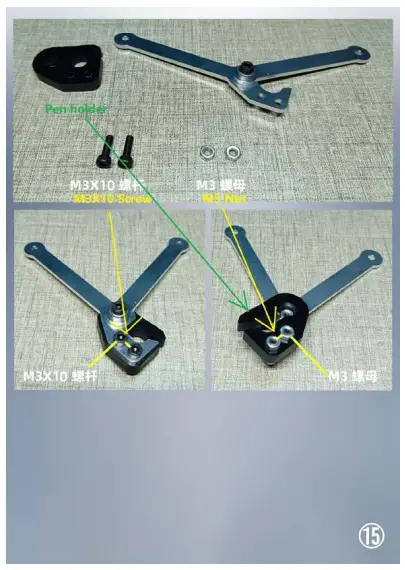
15단계
- 펜홀더 설치
16단계
- 모두 모아서 조립을 완료합니다.

자주 묻는 질문
질문: 그림 그리는 로봇의 전원을 켜려면 어떻게 해야 하나요?
A: 로봇의 전원을 켜고 서보가 회전을 멈출 때까지 기다린 후 전원을 끕니다.
질문: 서보를 나노 확장 쉴드에 어떻게 연결하나요?
A: 설명서에 제공된 그림과 같이 나노 확장 실드에 3개의 서보를 연결합니다.
문서 / 리소스
 |
Elektor Arduino 제어 드로잉 로봇 [PDF 파일] 설치 가이드 아두이노 제어 드로잉 로봇, 제어 드로잉 로봇, 드로잉 로봇, 로봇 |