Elektor Arduino制御描画ロボット
製品仕様
- Arduino制御のお絵かきロボット
- コンポーネント:
- Arduinoナノ – 5
- ナノシールド – 1
- Bluetoothモジュール – 1
- サーボ – 3
- ケーブル – 4
- ネジ:
- M2X8 – 6
- M2.5×6 – 2
- M3x6 – 2
- M3x8 – 15
- M3x10 – 3
- M3x12 – 6
- M3x16 – 2
- ナッツ:
- M2 – 6
- M3 – 29
- ガスケット:
- M3 – 2
- スペーサー:
- 黒ナイロン M3x2 – 5
- M3x9 – 2
- 追加コンポーネント:
- スプリング 5×0.4×6 – 1
- ベアリングM3x8 – 2
製品使用説明書
ステップ1:ナノ拡張シールドをインストールする
まず、8 本の M3X8 ネジと 4 本の M3X2 スペーサーを使用して、Nano 拡張シールドを図に示す場所に取り付けます。
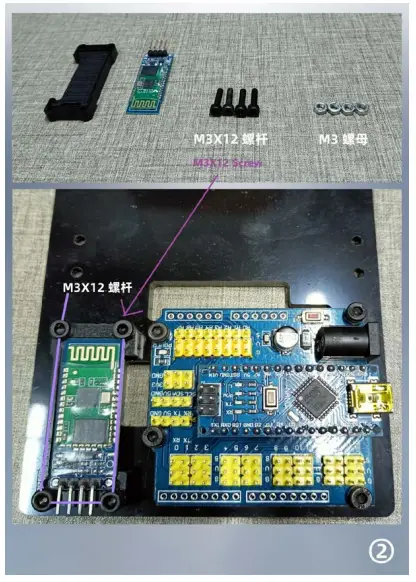
ステップ2: Bluetoothモジュールをインストールする
次に、4本のM3X12ネジとナットを使用してBluetoothモジュールを取り付けます。
コンポーネント
ネジ
- M2X8 —6
- M2.5×6 —2
- M3x6 —2
- M3x8—15
- M3x10—3
- M3x12—6
- M3x16—2
ナッツ
- M2 —6
- M3 —29
ガスケット
- M3 —2
スペーサー ブラック ナイロン
- M3x2 —5
- M3x9 —2
スプリングス
- 5×0.4×6 —1
ベアリング
- M3x8 —2
- Arduino ナノ —5
- ナノシールド —1
- Bluetoothモジュール — 1
- サーボ — 3
- ケーブル — 4
インストール手順
ステップ1
- まず、8本のM3X8ネジと4本のM3X2スペーサーを使用して、図の位置にナノ拡張シールドを取り付けます。

ステップ2
- 次に、M4X3ネジ12本とナットでBluetoothモジュールを取り付けます。
ステップ3
- 次に、2本のM3X8ネジとナットでブラケットを取り付けます。

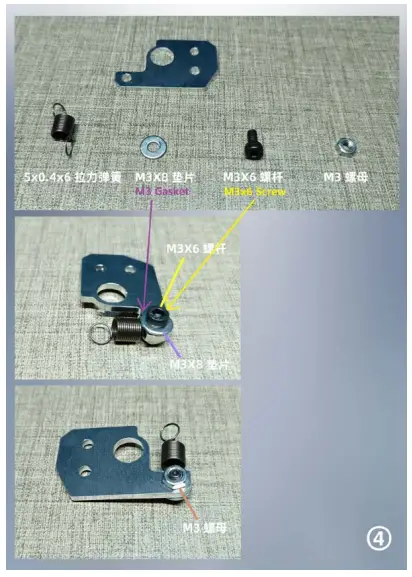
ステップ4
- このアームをリターンスプリングで組み立てる
ステップ5
- すべてをブラケットにまとめる

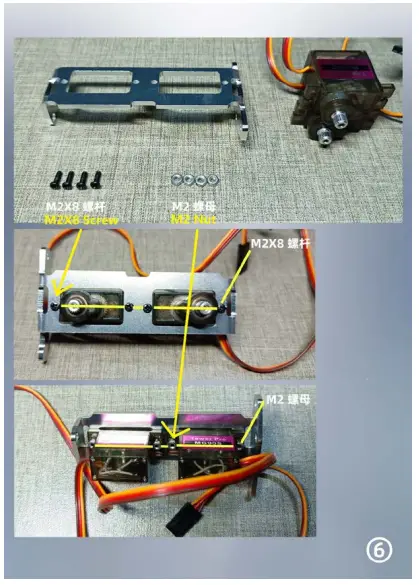
ステップ6
- 2つのサーボをM2X8ネジとナットで組み立てます
ステップ7
- 構造にベアリングを追加する
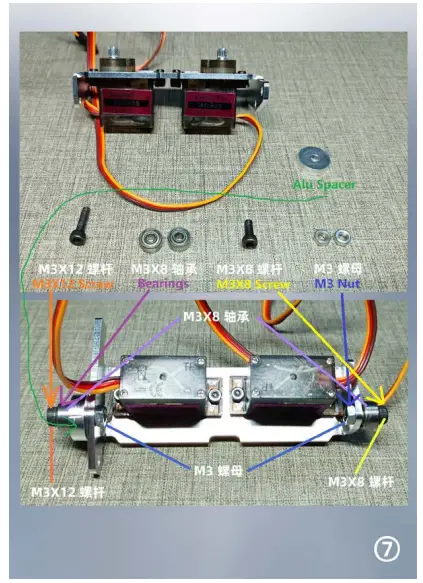
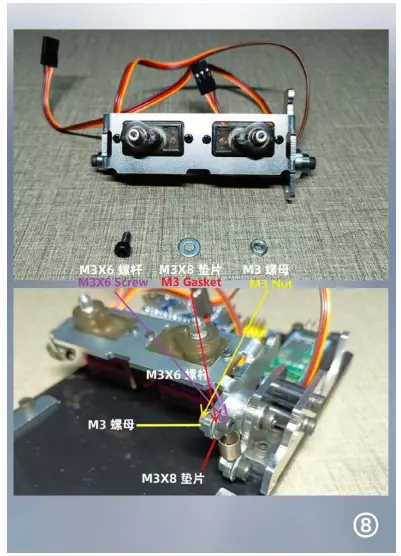
ステップ8
- サーボ付きフレームをリターンスプリングに接続する
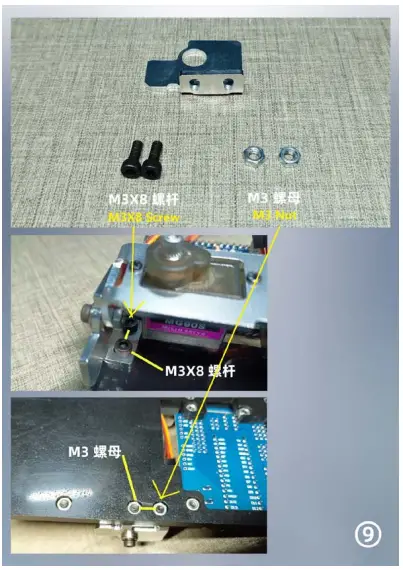
ステップ9
- もう一つのベースブラケットを取り付け、サーボフレームに接続します
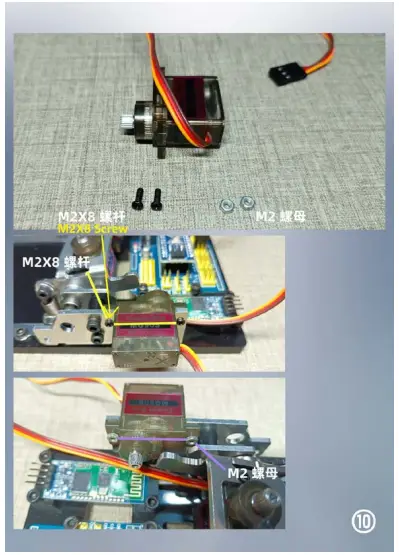
ステップ10
- 最後のサーボを取り付ける
ステップ11
- 図のように3つのサーボをNano拡張シールドに接続します
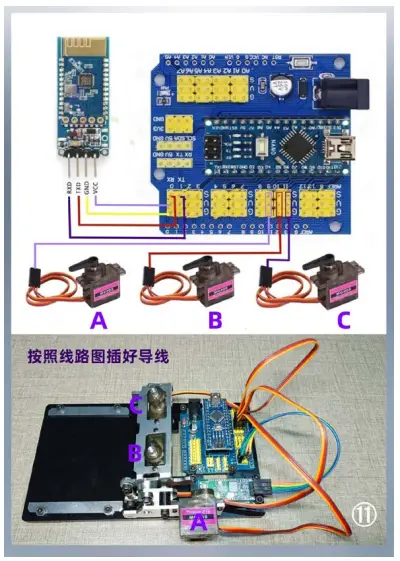
ステップ12
- 電源を入れ、サーボの回転が止まるまで待ってから電源を切ります
- 図のようにサーボアームを水平に設置します

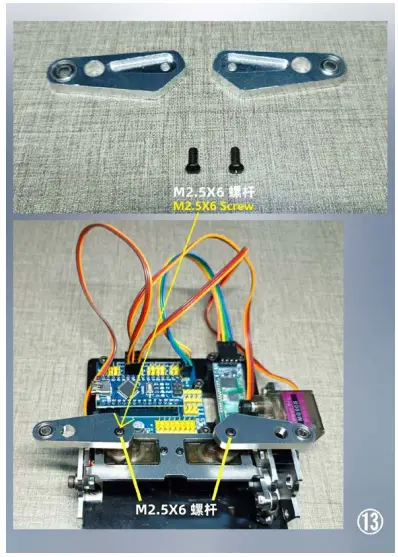
ステップ13
- M2X2.5ネジで6本のロボットアームを取り付ける
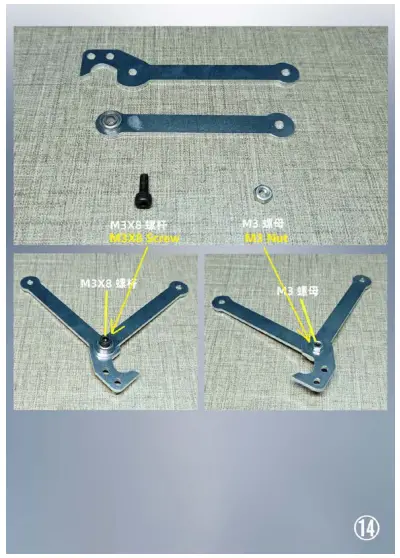
ステップ14
- そしてM3ネジ
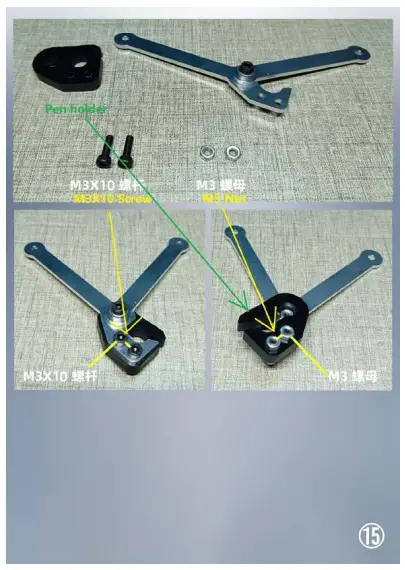
ステップ15
- ペンホルダーを取り付ける
ステップ16
- すべてを組み立てて完成させる

よくある質問
Q: 描画ロボットの電源をオンにするにはどうすればよいですか?
A: ロボットの電源を入れ、サーボの回転が停止するまで待ってから、電源をオフにします。
Q: サーボを Nano 拡張シールドに接続するにはどうすればよいですか?
A: マニュアルに記載されている図のように、3 つのサーボを Nano 拡張シールドに接続します。
ドキュメント / リソース
 |
Elektor Arduino制御描画ロボット [pdf] インストールガイド Arduino制御描画ロボット、制御描画ロボット、描画ロボット、ロボット |