روبوت الرسم المُتحكم به بواسطة أردوينو إليكتور
مواصفات المنتج
- روبوت الرسم الذي يتم التحكم فيه بواسطة Arduino
- عناصر:
- أردوينو نانو – 5
- نانو شيلد – 1
- وحدة بلوتوث – 1
- سيرفو – 3
- الكابلات – 4
- البراغي:
- M2X8 – 6
- M2.5×6 – 2
- M3x6 – 2
- M3x8 – 15
- M3x10 – 3
- M3x12 – 6
- M3x16 – 2
- المكسرات:
- م2 – 6
- م3 – 29
- جوانات:
- م3 – 2
- الفواصل:
- نايلون أسود M3x2 – 5
- M3x9 – 2
- المكونات الإضافية:
- نوابض 5×0.4×6 – 1
- محامل M3x8 – 2
تعليمات استخدام المنتج
الخطوة 1: تثبيت Nano Expansion Shield
أولاً، قم بتثبيت درع التوسعة النانوي باستخدام 8x مسامير M3X8 و4x فواصل M3X2 في الموقع الموضح.
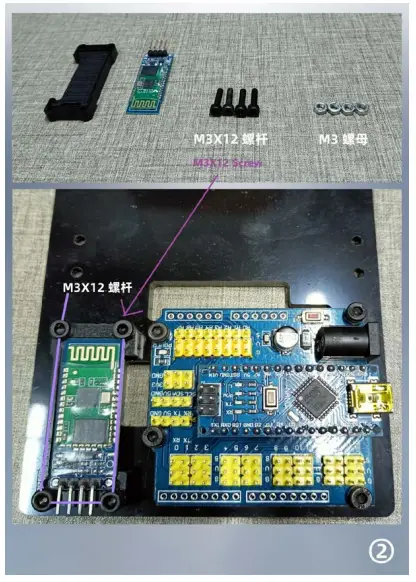
الخطوة 2: تثبيت وحدة البلوتوث
ثم قم بتثبيت وحدة البلوتوث باستخدام 4 براغي M3X12 مع الصواميل.
عناصر
براغي
- M2X8 —6
- م2.5×6 —2
- M3x6 —2
- M3x8—15
- M3x10—3
- M3x12—6
- M3x16—2
المكسرات
- م2 —6
- م3 —29
الحشيات
- م3 —2
فواصل نايلون سوداء
- M3x2 —5
- M3x9 —2
الينابيع
- 5×0.4×6 —1
المحامل
- M3x8 —2
- أردوينو نانو —5
- نانو شيلد —1
- وحدة بلوتوث —1
- محركات مؤازرة —3
- الكابلات —4
تعليمات التثبيت
الخطوة 1
- أولاً، قم بتثبيت درع التوسع النانوي باستخدام 8x مسامير M3X8 و4x فواصل M3X2 في الموقع الموضح

الخطوة 2
- ثم قم بتثبيت وحدة البلوتوث باستخدام 4 براغي M3X12 مع الصواميل
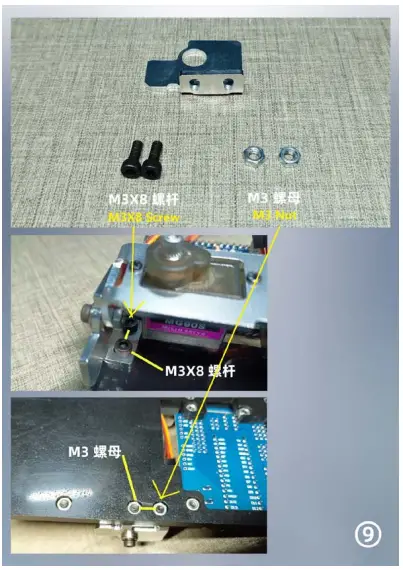
الخطوة 3
- ثم قم بتثبيت القوس باستخدام 2x مسامير M3X8 مع الصواميل

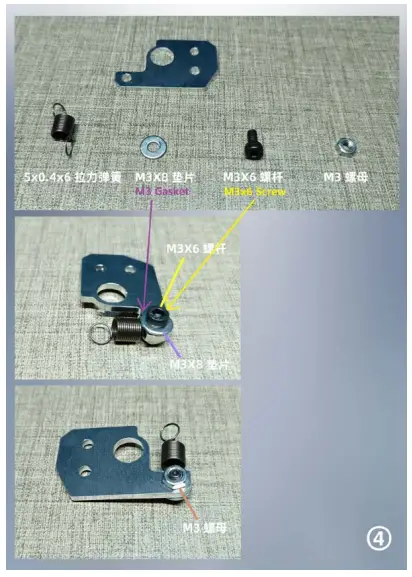
الخطوة 4
- تجميع هذا الذراع مع زنبرك العودة
الخطوة 5
- ضعهم جميعا معًا في القوس

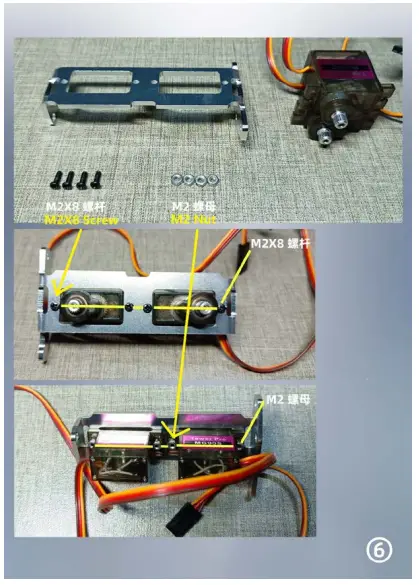
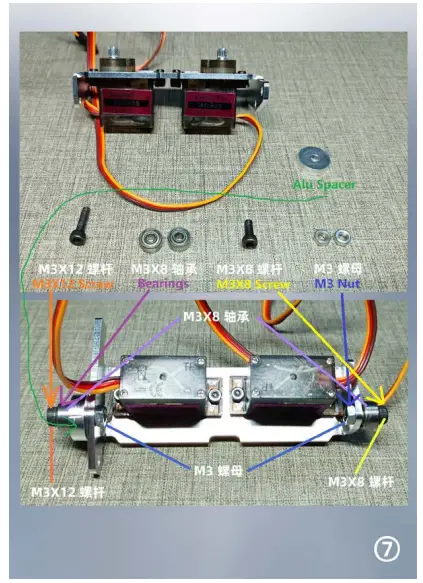
الخطوة 6
- الآن تجميع 2 سيرفو مع مسامير وصواميل M2X8
الخطوة 7
- إضافة المحامل إلى البناء
الخطوة 8
- قم بتوصيل الإطار باستخدام محركات السيرفو بنابض العودة
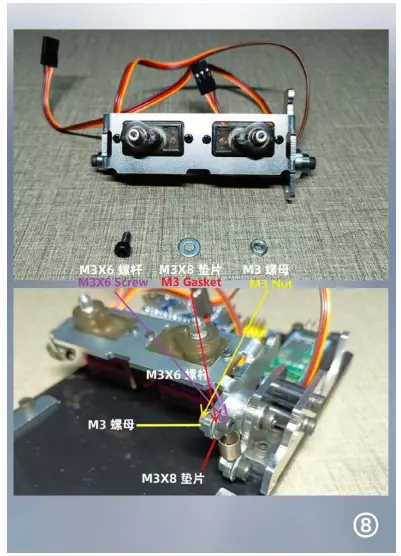
الخطوة 9
- قم بتثبيت حامل القاعدة الآخر، ثم قم بتوصيله بإطار المؤازرة
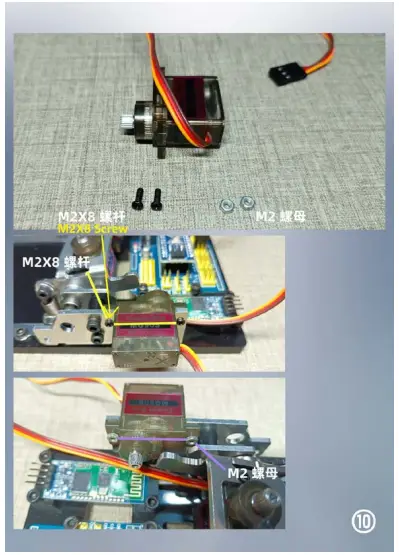
الخطوة 10
- قم بتثبيت السيرفو الأخير
الخطوة 11
- قم بتوصيل 3 محركات سيرفو بدرع التوسع النانوي كما هو موضح في الصورة
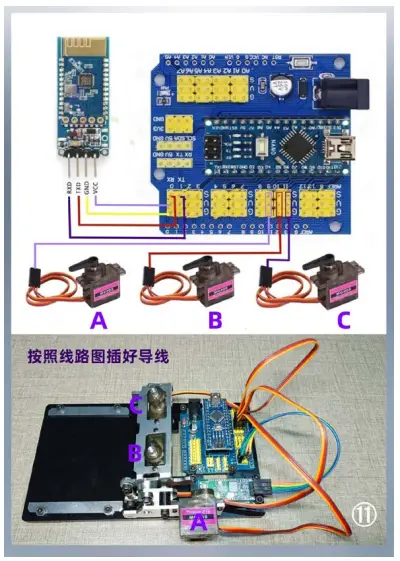
الخطوة 12
- قم بتشغيل الطاقة وانتظر حتى تتوقف المحركات عن الدوران، ثم قم بإيقاف تشغيل الطاقة
- قم بتثبيت أذرع المؤازرة بشكل أفقي كما هو موضح في الصور

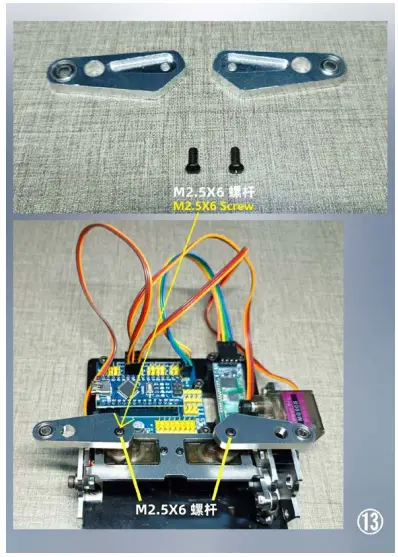
الخطوة 13
- قم بتثبيت ذراعي الروبوت باستخدام مسامير M2X2.5
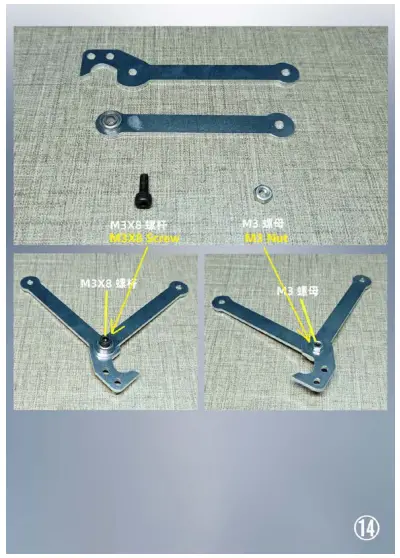
الخطوة 14
- ومسامير M3
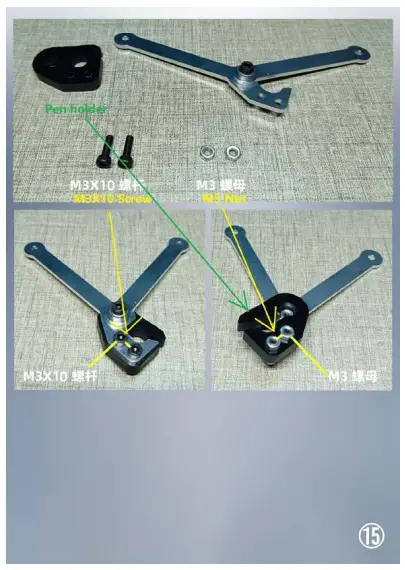
الخطوة 15
- قم بتثبيت حامل القلم
الخطوة 16
- ضع كل ذلك معًا، وأكمل التجميع

الأسئلة الشائعة
س: كيف أقوم بتشغيل روبوت الرسم؟
A: قم بتشغيل الروبوت وانتظر حتى تتوقف المحركات عن الدوران، ثم قم بإيقاف تشغيل الطاقة.
س: كيف أقوم بتوصيل المؤازرات بدرع التوسع النانو؟
A: قم بتوصيل 3 محركات سيرفو بدرع التوسعة النانوي كما هو موضح في الصورة المقدمة في الدليل.
المستندات / الموارد
 |
روبوت الرسم المُتحكم به بواسطة أردوينو إليكتور [بي دي اف] دليل التثبيت روبوت الرسم المُتحكم به بواسطة أردوينو، روبوت الرسم المُتحكم به، روبوت الرسم، روبوت |