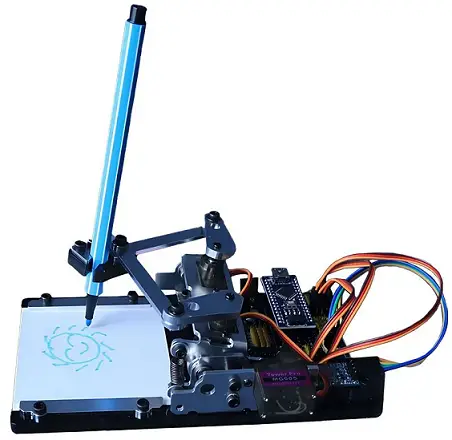
Elektor Arduino 控制绘图机器人
产品规格
- Arduino控制的绘图机器人
- 成分:
- Arduino Nano – 5
- 纳米盾 – 1
- 蓝牙模块 - 1
- 伺服器 – 3
- 电缆 – 4
- 螺钉:
- M2X8 – 6
- M2.5×6 – 2
- M3x6 – 2
- M3x8 – 15
- M3x10 – 3
- M3x12 – 6
- M3x16 – 2
- 坚果:
- M2 – 6
- M3 – 29
- 垫片:
- M3 – 2
- 垫片:
- 黑色尼龙 M3x2 – 5
- M3x9 – 2
- 附加组件:
- 弹簧 5×0.4×6 – 1
- 轴承 M3x8 – 2
产品使用说明
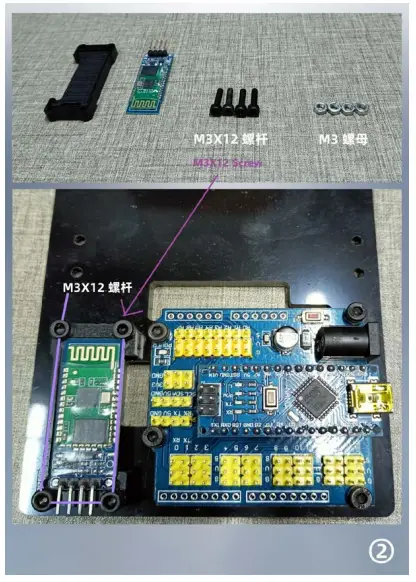
步骤 1:安装纳米扩展屏蔽
首先,使用 8 个 M3X8 螺钉和 4 个 M3X2 垫片在所示位置安装 Nano 扩展屏蔽。
步骤2:安装蓝牙模块
然后用 4 个带螺母的 M3X12 螺钉安装蓝牙模块。
成分
螺钉
- M2X8 —6
- M2.5×6 —2
- M3x6 —2
- M3x8—15
- M3x10—3
- M3x12—6
- M3x16—2
坚果
- M2 —6
- M3 —29
垫圈
- M3 —2
黑色尼龙垫片
- M3x2 —5
- M3x9 —2
弹簧
- 5×0.4×6 —1
轴承
- M3x8 —2
- Arduino Nano —5
- 纳米盾 —1
- 蓝牙模块 —1
- 伺服器 —3
- 电缆 —4
安装说明
步骤 1
- 首先,使用 8 个 M3X8 螺钉和 4 个 M3X2 垫片在所示位置安装 Nano 扩展屏蔽

步骤 2
- 然后用 4 个 M3X12 螺钉和螺母安装蓝牙模块
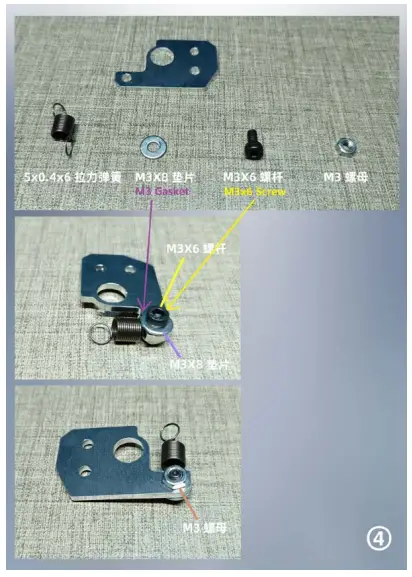
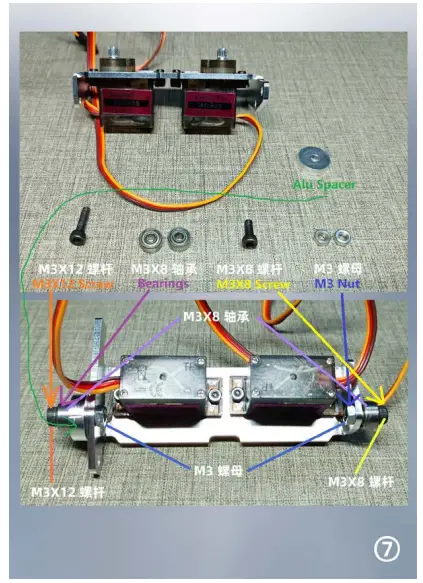
步骤 3
- 然后用 2 个 M3X8 螺钉和螺母安装支架

步骤 4
- 将此臂与回位弹簧组装在一起
步骤 5
- 把它们全部放到支架上

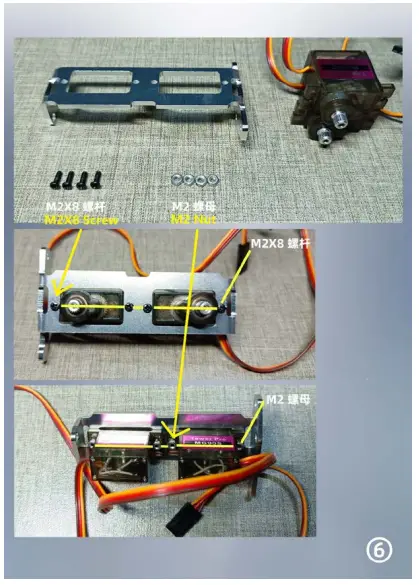
步骤 6
- 现在组装2个伺服器,带M2X8螺钉和螺母
步骤 7
- 在结构上添加轴承
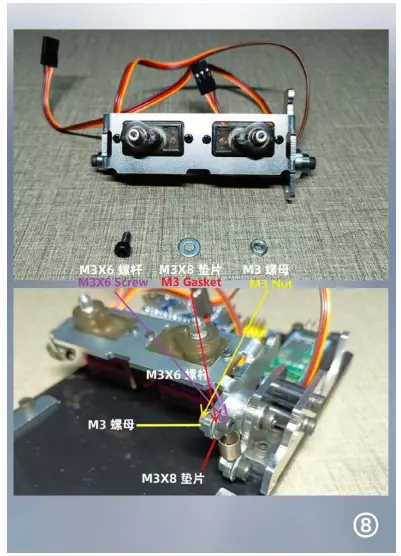
步骤 8
- 将带伺服器的框架连接到回位弹簧
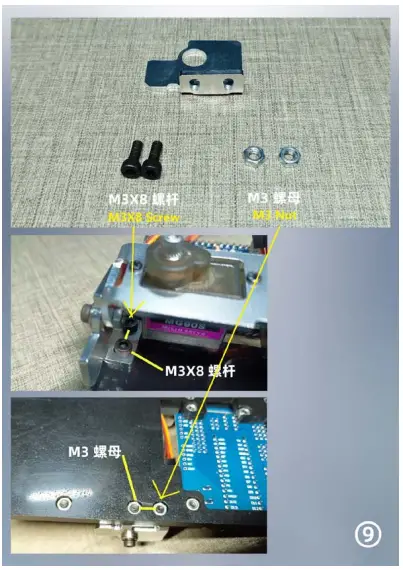
步骤 9
- 安装另一个底座支架,并将其连接到伺服框架
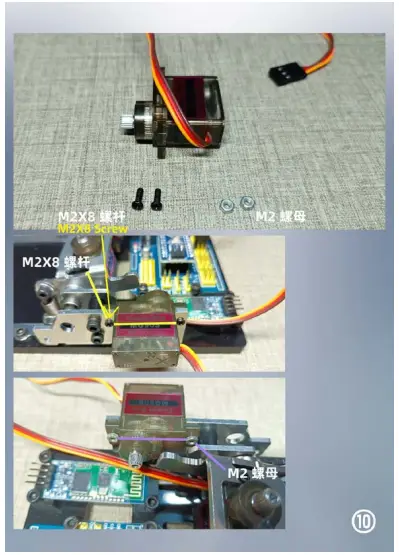
步骤 10
- 安装最后一个伺服器
步骤 11
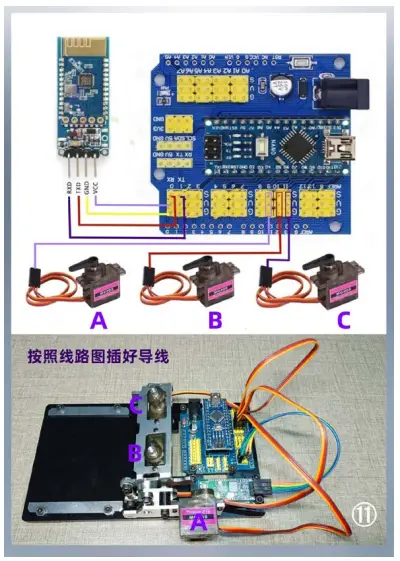
- 如图所示,将 3 个舵机连接到 Nano 扩展板
步骤 12
- 开启电源,等待舵机停止转动,然后关闭电源
- 如图所示,水平安装伺服臂

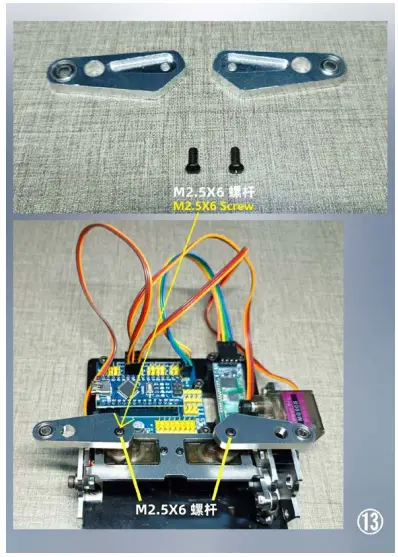
步骤 13
- 使用 M2X2.5 螺钉安装 6 个机械臂
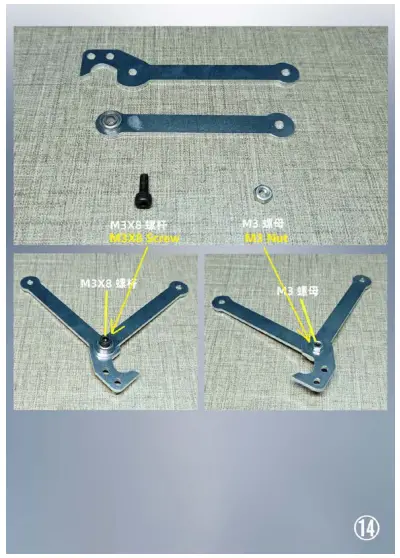
步骤 14
- 和M3螺丝
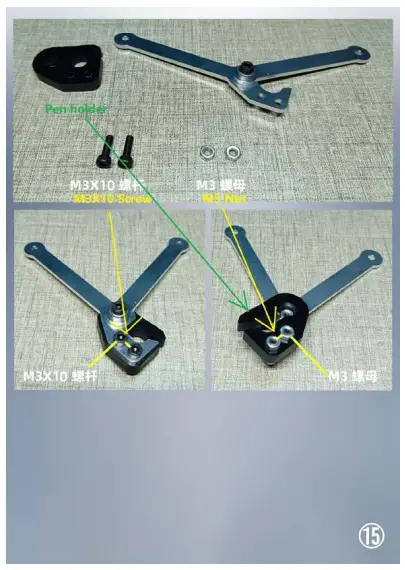
步骤 15
- 安装笔架
步骤 16
- 将所有东西放在一起,完成组装

常见问题
问:如何启动绘图机器人?
A: 打开机器人电源,等待伺服器停止转动,然后关闭电源。
问:如何将伺服器连接到 Nano 扩展板?
A: 按照手册中提供的图片所示,将 3 个伺服器连接到 Nano 扩展板。
文件/资源
 |
Elektor Arduino 控制绘图机器人 [pdf] 安装指南 Arduino控制绘图机器人,控制绘图机器人,绘图机器人,机器人 |