![]() BTC-9090 模糊邏輯微處理器控制器
BTC-9090 模糊邏輯微處理器控制器
使用說明書
介紹
本手冊包含 Brainchild 型號 BTC-9090 模糊邏輯微處理器控制器的安裝和操作資訊。
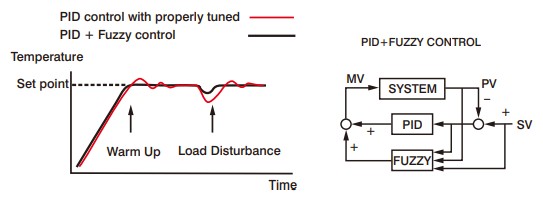
模糊邏輯是此多功能控制器的一個基本特徵。儘管 PID 控制已被工業界廣泛接受,但 PID 控制很難有效地與一些複雜的系統配合使用,例如amp二階系統、長時滯系統、各種設定點系統、各種負載系統等。tag由於PID控制的控制原理和固定值的限制,對於變化較多的系統,其控制效率很低,而且對於某些系統來說,其結果顯然是令人沮喪的。模糊邏輯控制可以克服缺點tag與 PID 控制不同,它根據先前的經驗以有效的方式控制系統。模糊邏輯的功能是透過間接的方式調整PID值,使得操作輸出值MV能夠靈活調整,快速適應各種製程。透過這種方式,它使得過程能夠在最短的時間內達到其預定的設定點,並且在調整或外部幹擾期間將過衝降至最低。與數位資訊的PID控制不同,模糊邏輯是一種語言資訊的控制。
此外,該儀器還具有單次tag呃amp 並停留、自動調節和手動模式執行。易於使用也是其一個重要特性。
編號系統
型號 ![]() (1)電源輸入
(1)電源輸入
| 4 | 90-264VAC |
| 5 | 20-32交流/直流 |
| 9 | 其他 |
(2)訊號輸入
1 0 – 5V 3 PT100 DIN 5 TC 7 0 – 20mA 8 0 – 10V
(3) 範圍代碼
| 1 | 可配置 |
| 9 | 其他 |
(4)控制方式
| 3 | PID / 開關控制 |
(5)輸出 1 選項
| 0 | 沒有任何 |
| 1 | 繼電器額定 2A/240VAC 電阻 |
| 2 | SSR 驅動額定 20mA/24V |
| 3 | 4-20mA線性,最大。負載 500 歐姆(模組 OM93-1) |
| 4 | 0-20mA線性,最大。負載 500 歐姆(模組 OM93-2) |
| 5 | 0-10V 線性,最小值阻抗 500K 歐姆(模組 OM93-3) |
| 9 | 其他 |
(6)輸出 2 選項
| 0 | 沒有任何 |
(7)警報選項
| 0 | 沒有任何 |
| 1 | 繼電器額定 2A/240VAC 電阻 |
| 9 | 其他 |
(8)溝通
| 0 | 沒有任何 |
前面闆說明
 輸入範圍和精度
輸入範圍和精度
| IN | 感應器 | 輸入類型 | 範圍( BC ) | 準確性 |
| 0 | J | 鐵-康銅 | 西元前 50 年至西元前 999 年 | A2BC |
| 1 | K | 鉻鎳合金-鋁鎳合金 | 西元前 50 年至西元前 1370 年 | A2BC |
| 2 | T | 銅-康銅 | 西元前 270 年至西元前 400 年 | A2BC |
| 3 | E | 鉻鎳鐵-康銅 | 西元前 50 年至西元前 750 年 | A2BC |
| 4 | B | 鉑電阻30%RH/鉑電阻6%RH | 西元前 300 年至 1800 年 | A3BC |
| 5 | R | 鉑13%RH/鉑 | 西元前 0 年至 1750 年 | A2BC |
| 6 | S | 鉑10%RH/鉑 | 西元前 0 年至 1750 年 | A2BC |
| 7 | N | 鎳鉻矽一鎳矽 | 西元前 50 年至西元前 1300 年 | A2BC |
| 8 | 熱電阻 | PT100 歐姆(DIN) | 西元前 200 年至西元前 400 年 | A0.4BC |
| 9 | 熱電阻 | PT100 歐姆(JIS) | 西元前 200 年至西元前 400 年 | A0.4BC |
| 10 | 線性 | -10mV至60mV | -1999 至 9999 | 0.05% |
規格
輸入
| 熱電偶(T/C): | J、K、T、E、B、R、S、N 型。 |
| RTD: | PT100 歐姆 RTD(DIN 43760/BS1904 或 JIS) |
| 線性: | -10 至 60 mV,可設定輸入衰減 |
| 範圍: | 使用者可配置,參考上表 |
| 準確性: | 請參考上表 |
| 冷端補償: | 0.1 BC/ BC 環境典型值 |
| 感測器斷路保護: | 保護模式可配置 |
| 外部阻力: | 最大 100 歐姆。 |
| 正常模式抑制: | 60分貝 |
| 共模抑制: | 120分貝 |
| Samp利率: | 3次/秒 |
控制
| 比例帶: | 西元前0 – 200年(西元前0-360年) |
| 重置(積分): | 0 – 3600 秒 |
| 利率(衍生性商品): | 0 – 1000 秒 |
| Ramp 速度: | 0 – 200.0 BC/分鐘(0 – 360.0 BF/分鐘) |
| 住: | 0 – 3600 分鐘 |
| 開關: | 具有可調滯後(0-20% 的 SPAN) |
| 週期: | 0-120秒 |
| 控制動作: | 正向(用於冷卻)和反向(用於加熱) |
| 力量 | 90-264VAC,50/60Hz 10VA 20-32VDC/VAC, 50/60Hz 10VA |
環境與物理
| 安全: | UL 61010-1,第 3 版。 CAN/CSA-C22.2 No. 61010-1(2012-05), 第三版。 |
| EMC 輻射: | EN50081-1 |
| EMC 抗擾度: | EN50082-2 |
| 工作溫度: | 西元前 10 年至西元前 50 年 |
| 濕度: | 0 至 90 % RH(非冷凝) |
| 絕緣: | 最小 20M 歐姆。 (500 伏特直流) |
| 分解: | AC 2000V,50/60Hz,1分鐘 |
| 振動: | 10 – 55 赫茲, amp緯度 1 毫米 |
| 震驚: | 200 公尺/秒(20 克) |
| 淨重: | 170克 |
| 外殼材料: | 聚碳酸酯塑料 |
| 高度: | 小於2000m |
| 室內使用 | |
| 過音量tage類別 | II |
| 污染程度: | 2 |
| 電源輸入電壓波動: | 名義成交量的10%tage |
安裝
6.1 尺寸和麵板開口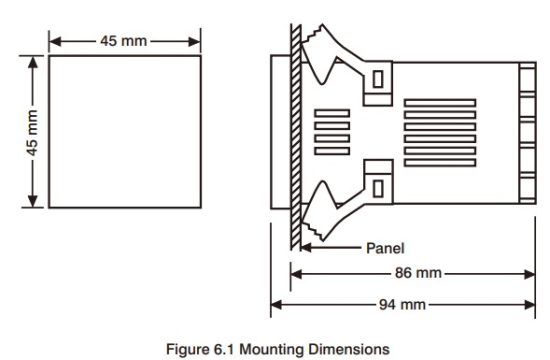 6.2 接線圖
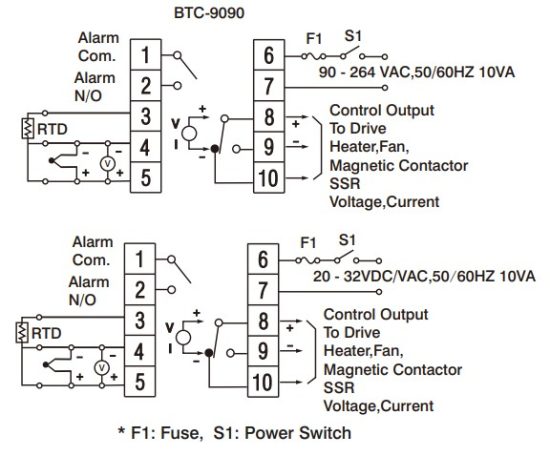
6.2 接線圖
校準
筆記: 除非確實需要重新校準控制器,否則請不要繼續執行本節。所有先前的校準日期都將遺失。除非您有合適的校準設備,否則請不要嘗試重新校準。如果校準資料遺失,您需要將控制器退還給供應商,供應商可能會收取重新校準的費用。
校準前確保所有參數設定正確(輸入類型、C / F、解析度、低範圍、高範圍)。
- 移除感測器輸入接線,並將正確類型的標準輸入模擬器連接到控制器輸入。檢查極性是否正確。將類比訊號設定為與低過程訊號一致(例如零度)。
- 使用滾動鍵直到“
 」出現在 PV 顯示幕上。 (參考 8.2)
」出現在 PV 顯示幕上。 (參考 8.2) - 使用向上和向下鍵直到 PV 顯示器顯示類比輸入。
- 按住返回鍵至少 6 秒(最多 16 秒),然後放開。這會將低校準數字輸入到控制器的非揮發性記憶體中。
- 按下並釋放滾動鍵。 」
 」出現在 PV 顯示幕上。這表示高校準點。
」出現在 PV 顯示幕上。這表示高校準點。 - 增加類比輸入訊號,使其與高 11 過程訊號一致(例如 100 度)。
- 使用向上和向下鍵直到 SV 顯示器代表模擬的高輸入。
- 按住回車鍵至少 6 秒(最多 16 秒),然後放開。這會將高校準數字輸入到控制器的非揮發性記憶體中。
- 關閉設備電源,拆除所有測試線路並更換感測器線路(觀察極性)。
手術
8.1 鍵盤操作
* 通電後,一旦改變參數,需等待12秒才能記憶新的參數值。
| 觸摸鍵 | 功能 | 描述 |
| 滾動鍵 | 將索引顯示前進至所需位置。 按下此鍵可使索引連續循環前進。 |
|
| 向上鍵 | 增加參數 | |
| 向下鍵 | 減小參數 | |
| 返回鍵 | 將控制器重置為正常狀態。也停止自動調節,輸出百分比tage 監控和手動模式操作。 | |
| 按 |
長卷 | 允許檢查或更改更多參數。 |
| 按 |
長期回報 | 1. 執行自整定功能 2. 校準水平時校準控制 |
| 按 |
產量百分比tag電子監視器 | 允許設定點顯示指示控制輸出值。 |
| 按 |
手動模式執行 | 允許控制器進入手動模式。 |
8.2 流程圖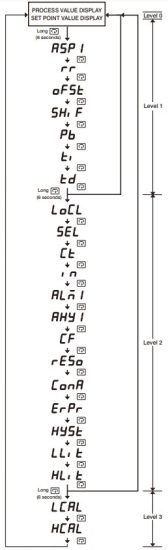 可以隨時按下“返回”鍵。
可以隨時按下“返回”鍵。
這將提示顯示器返回到過程值/設定點值。
所用功率:
 顯示4秒。 (軟體版本 3.6 或更高)
顯示4秒。 (軟體版本 3.6 或更高) LED 測試。所有 LED 段必須亮起 4 秒。
LED 測試。所有 LED 段必須亮起 4 秒。- 指示過程值和設定點。
8.3 參數說明
| 索引程式碼 | 描述 調整範圍 | **預設設定 | ||
| SV | 設定點值控制 *低限至高限值 |
不明確的 | ||
| 警報設定點值 * 低限值至高限值ue. if * 0 至 3600 分鐘(如果 * 下限減s 設定點為高極限減去設定點值(如果 |
公元前200 | |||
| Ramp 限制過程值突變的速率(軟啟動) * 0 至 200.0 BC (360.0 BF) / 分鐘(如果 * 0 至 3600 單位/分鐘(如果 |
0 BC/分鐘。 | |||
| 手動復位的偏移值(如果 |
0.0% | |||
| 過程值的偏移量 * -西元前 111 年至西元前 111 年 |
公元前0 | |||
| 比例帶
* 0 至 200 BC(設定為 0 進行開關控制) |
公元前10 | |||
| 積分(重設)時間 * 0 至 3600 秒 |
120秒 | |||
| 導數(速率)時間 * 0 至 360.0 秒 |
30秒 | |||
| 本地模式 0:控制參數不可改變 1:控制參數可改變 |
1 | |||
| 參數選擇(允許選擇可在 0 級安全等級存取的附加參數) |
0 | |||
| 比例循環時間 * 0 至 120 秒 |
中繼 | 20 | ||
| 脈衝電壓tage | 1 | |||
| 線性伏特/毫安 | 0 | |||
| 輸入模式選擇 0: J 型熱電偶 6: S 型熱電偶 1: K 型熱電偶 7: N 型熱電偶 2: T 型熱電偶 8: PT100 DIN 3: E 型熱電偶 9: PT100 JIS 4: B 型熱電偶 10: 線性體積tage 或電流 5: R 型 T/C 註:T/C-關閉焊接G5,RTD-開啟G5 |
電匯 | 0 | ||
| 熱電阻 | 8 | |||
| 線性 | 10 | |||
| 警報模式選擇 0:過程高警報 8:帶外報警 1:過程低警報 9:帶內報警 2:偏誤高警報 10:抑制帶外警報 3:偏差低警報 11:抑制帶內警報 4:抑制過程高警報 12:警報繼電器關閉 5:抑制過程低警報 停留時間 6:抑制偏差高警報 13:警報繼電器開啟,7:抑制偏差低警報停留超時 |
0 | |||
| 警報 1 的滯後 * 0 至 20% 的跨度 |
0.5% | |||
| BC/BF 選擇 0:BF,1:BC |
1 | |||
| 分辨率選擇 0:無小數點 2:2 位小數 1:1 位小數 3:3 位小數 (2 和 3 僅可用於線性卷tage 或電流 |
0 |
|||
| 控制動作 0:正向(冷卻)作用 1:反向(加熱)作用 |
1 | |||
| 錯誤保護 0:控制關閉,警報關閉 2:控制打開,警報關閉 1:控制關閉,警報開啟 3:控制打開,警報打開 |
1 |
|||
| 開/關控制的滯後 *0 至 20% 的量程 |
0.5% | |||
| 量程下限 | 西元前 50 年 | |||
| 範圍上限 | 公元前1000 | |||
| 低校準圖 | 公元前0 | |||
| 高校準圖 | 公元前800 | |||
筆記: * 參數調整範圍
** 出廠設定。過程警報位於固定溫度點。偏差警報隨設定點數值移動。
8.4 自動調諧
- 確保控制器配置正確並安裝。
- 確保比例帶“Pb”未設定為“0”。
- 按住回車鍵至少 6 秒(最多 16 秒)。這將初始化自動調諧功能。 (若要中止自動調諧過程,請按下回車鍵並放開)。
- PV 顯示器右下角的小數點閃爍,表示自動調諧正在進行中。閃爍停止時,自動調諧完成。
- 根據具體過程,自動調諧可能需要長達兩個小時。具有較長時間延遲的流程將需要最長的時間進行調整。請記住,顯示點閃爍時控制器正在自動調整。
筆記: 如果出現 AT 錯誤( ![]() ) 發生時,由於系統以 ON-OFF 控制方式運作(PB=0),自動調諧過程將中止。
) 發生時,由於系統以 ON-OFF 控制方式運作(PB=0),自動調諧過程將中止。
如果設定點設定為接近製程溫度或系統容量不足以達到設定點(例如可用的加熱功率不足),則該程序也會中止。自動調節完成後,新的 PID 設定將自動輸入到控制器的非揮發性記憶體中
8.5 手動 PID 調節
雖然自動調節功能選擇的控制設定應該可以滿足大多數過程的要求,但您可能會發現有必要不時地對這些任意設定進行調整。如果對流程做了一些更改或您希望「微調」控制設置,則可能發生這種情況。
在更改控制設定之前,記錄當前設定以供將來參考非常重要。每次只對一個設定進行細微更改,並觀察過程中的結果。由於每個設定都相互影響,如果您不熟悉製程控製程序,很容易對結果感到困惑。
調音指南
比例帶
| 症狀 | 解決方案 |
| 反應慢 | 降低 PB 值 |
| 高過衝或振盪 | 提高 PB 值 |
積分時間(重設)
| 症狀 | 解決方案 |
| 反應慢 | 減少積分時間 |
| 不穩定或振盪 | 增加積分時間 |
微分時間(速率)
| 症狀 | 解決方案 |
| 響應緩慢或振盪 | 減少衍生性商品。時間 |
| 高超調 | 增加衍生性商品。時間 |
8.6 手動調整程序
步驟 1:將積分和微分值調整為 0。
步驟2:設定比例帶的任意值並監控控制結果
步驟3:如果原始設定引入了較大的製程振盪,則逐漸增加比例帶,直到出現穩定循環。記錄該比例帶值(Pc)。
步驟 4:測量穩定循環週期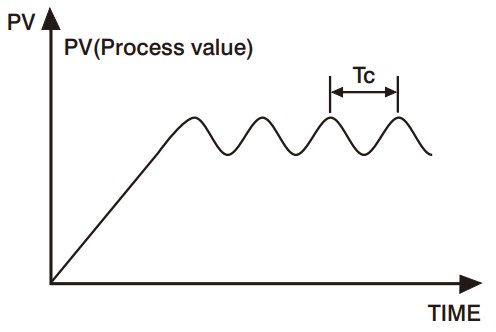 以秒為單位記錄該值 (Tc)
以秒為單位記錄該值 (Tc)
步驟5:控制設定確定如下:
比例帶(PB)=1.7 Pc
積分時間(TI)=0.5 Tc
微分時間(TD)=0.125 Tc
8.7 RAMP &停留
BTC-9090 控制器可設定為固定設定點控制器或單一 ramp 控制器通電時。此功能使用戶能夠設定預定的amp 速率使製程逐漸達到設定點溫度,從而產生「軟啟動」功能。
BTC-9090 內裝有停留定時器,警報繼電器可配置為提供停留功能,以便與 r 結合使用。amp 功能。
的ramp 利率由' ![]() '參數可以在0到200.0 BC/分鐘的範圍內調整。 ramp 當'
'參數可以在0到200.0 BC/分鐘的範圍內調整。 ramp 當' ![]() '參數設定為'0'。
'參數設定為'0'。
將警報輸出配置為停留計時器,可以啟用浸泡功能。參數 ![]() 需要設定為值 12。
需要設定為值 12。![]() .
.
如果控制器電源或輸出透過警報觸點連接,則控制器將作為保證浸泡控制器運作。
在前amp低於 Ramp 費率設定為 5 BC/分鐘, ![]() = 12且
= 12且 ![]() =15(分鐘)。在零時間接通電源,過程以 5 BC/分鐘的速度上升至 125 BC 的設定點。達到設定點後,停留計時器被激活,浸泡 15 分鐘後,警報觸點將打開,關閉輸出。過程溫度最終將以不確定的速率下降。
=15(分鐘)。在零時間接通電源,過程以 5 BC/分鐘的速度上升至 125 BC 的設定點。達到設定點後,停留計時器被激活,浸泡 15 分鐘後,警報觸點將打開,關閉輸出。過程溫度最終將以不確定的速率下降。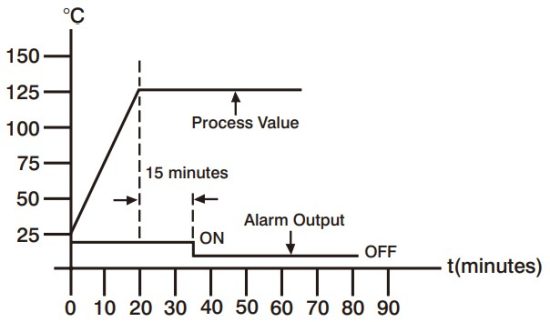 停留功能可用於操作外部設備(如警報器),以在達到浸泡時間時發出警報。
停留功能可用於操作外部設備(如警報器),以在達到浸泡時間時發出警報。
需要設定為值 13。一旦達到設定溫度,計時器就開始倒數計時。當設定的時間過去後,警報觸點閉合。
錯誤訊息
| 症狀 | 原因 | 解決方案 |
| 感測器斷路錯誤 | 更換 RTD 或感測器 使用手動模式操作 |
|
| 製程顯示超出低範圍設定點 | 重新調整值 | |
| 過程顯示超出高範圍設定點 | 重新調整值 | |
| 類比混合模組損壞 | 更換模組。檢查外部損壞源,如瞬時電壓tag尖峰 | |
| 自動調諧程序操作不正確,比例帶設定為 0 | 重複此過程。將 Prop. Band 增加到大於 0 的數字 | |
| 開關控制系統不允許使用手動模式 | 增加比例帶 | |
| 校驗和錯誤,記憶體中的值可能已意外更改 | 檢查並重新配置控制參數 |
新版本補充說明
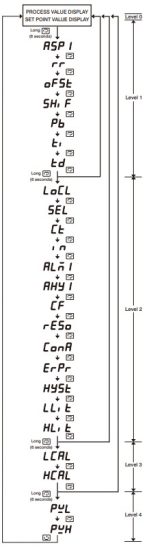
韌體版本為 V3.7 的裝置具有兩個附加參數 - “PVL”和“PVH”,位於第 4 級,如左側的參數流程圖所示。
當需要將LLit值改為更高的值或將HLit值改為更低的值時,必須遵循以下步驟,使得PVL值相當於LCAL值的十分之一,PVH值相當於HCAL值的十分之一。否則,測量的過程值將超出規格範圍。
- 使用滾動鍵直到 PV 顯示器上出現「LLit」。使用向上和向下鍵將 LLit 值設定為高於原始值。
- 按下並釋放滾動鍵,然後 PV 顯示器上出現「HLit」。使用向上和向下鍵將 HLit 值設定為低於原始值的值。
- 關閉然後打開電源。
- 使用滾動鍵直到 PV 顯示器上出現「LCAL」。記下 LCAL 值。
- 按下並釋放滾動鍵,然後 PV 顯示器上出現「HCAL」。記下 HCAL 值。
- 按住滾動鍵至少 6 秒鐘然後放開,「PVL」出現在 PV 顯示器上。使用UP和Down鍵將PVL值設為LCAL值的十分之一。
- 按下並釋放滾動鍵,「PVH」出現在 PV 顯示器上。使用UP和Down鍵將PVH值設為HCAL值的十分之一。
-請在電源端安裝20A斷路器
-要清除灰塵,請使用乾布
-安裝任何包含設備的系統的安全是系統組裝者的責任
-如果設備未按照製造商指定的方式使用,設備提供的保護可能會受到損害
請勿遮蓋冷卻通風口以保持氣流
注意不要將端子螺絲旋得太緊。扭力不應超過。 1 14 Nm ( 10 Lb-in 或 11.52 KgF-cm ),溫度最低 60°C,僅使用銅導體。
除熱電偶接線外,所有接線都應使用最大規格為 18 AWG 的絞合銅導體。
保固單
布萊恩查德電子有限公司很樂意為您提供有關其各類產品的使用建議。
然而,Brainchild 不對其產品的適用性或購買者對其產品的使用做出任何形式的保證或陳述。選擇、應用或使用 Brainchild 產品是購買者的責任。任何損害或損失,無論是直接的、間接的、偶然的、特殊的或必然的,均不允許提出索賠。規格如有變更,恕不另行通知。此外,Brainchild 保留對材料或加工進行更改(無需通知購買者)的權利,但無需影響對任何適用規範的遵守。 Brainchild 產品保證在交付給第一位購買者使用後的 18 個月內不會出現材料和工藝缺陷。可應要求延長期限,但需支付額外費用。根據本保固條款,Brainchild 的唯一責任(由 Brainchild 選擇)僅限於在規定的保固期內免費更換或維修、或退還購買價格。本保固不適用於因運送、改裝、誤用或濫用造成的損壞。
退貨
如果沒有填寫完整的退貨資料授權 (RMA) 表格,則不會接受任何產品退貨。
筆記:
本使用手冊中的資訊如有變更,恕不另行通知。
版權所有 2023,Brainchild Electronic Co., Ltd.,保留所有權利。未經 Brainchild Electronic Co., Ltd. 書面許可,不得以任何方式複製、傳播、轉錄或儲存本出版物的任何部分,或將本出版物的任何部分翻譯成任何形式的語言。
![]() 如有任何維修或保養需要,請聯繫我們。
如有任何維修或保養需要,請聯繫我們。
電子有限公司
南港區中央路209號
台灣台北市 11573
電話:886-2-27861299
傳真:886-2-27861395
web 地點: http://www.brainchildtw.com![]()
文件/資源
 |
BrainChild BTC-9090 模糊邏輯微處理器控制器 [pdf] 使用說明書 BTC-9090、BTC-9090 G UL、BTC-9090基於模糊邏輯微處理器的控制器、基於模糊邏輯微處理器的控制器、基於微處理器的控制器、基於處理器的控制器、基於控制器 |