![]() Controlador basado en microprocesador de lógica difusa BTC-9090
Controlador basado en microprocesador de lógica difusa BTC-9090
Manual de instrucciones
INTRODUCCIÓN
Este manual contiene información para la instalación y el funcionamiento del controlador basado en microprocesador de lógica difusa Brainchild modelo BTC-9090.
La lógica difusa es una característica esencial de este versátil controlador. Aunque el control PID ha sido ampliamente aceptado por las industrias, todavía es difícil que el control PID funcione con algunos sistemas sofisticados de manera eficiente, por ejemploampsistemas de segundo orden, con retardo de tiempo largo, varios puntos de ajuste, varias cargas, etc. Debido a desventajastagDebido a los principios de control y los valores fijos del control PID, es ineficiente controlar los sistemas con muchas variedades y el resultado es obviamente frustrante para algunos sistemas. El control de lógica difusa puede superar las desventajas.tagEl control PID controla el sistema de manera eficiente a partir de experiencias previas. La función de la lógica difusa es ajustar los valores PID indirectamente para que el valor de salida de manipulación MV se ajuste de manera flexible y se adapte rápidamente a varios procesos. De esta manera, permite que un proceso alcance su punto de ajuste predeterminado en el menor tiempo posible con un sobreimpulso mínimo durante el ajuste o la perturbación externa. A diferencia del control PID con información digital, la lógica difusa es un control con información de lenguaje.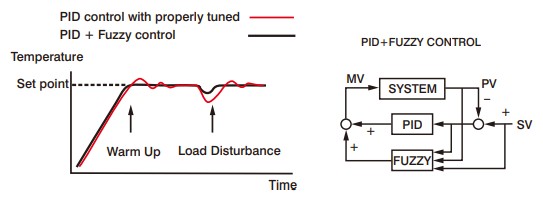
Además, este instrumento tiene funciones de un solo toque.tagesamp y modo de espera, autoajuste y ejecución manual. La facilidad de uso también es una característica esencial.
SISTEMA DE NUMERACIÓN
Modelo Nro. ![]() (1) Entrada de energía
(1) Entrada de energía
| 4 | 90-264 V CA |
| 5 | 20-32 V CA/V CC |
| 9 | Otro |
(2) Entrada de señal
1 0 – 5 V 3 PT100 DIN 5 TC 7 0 – 20 mA 8 0 – 10 V
(3) Código de rango
| 1 | Configurable |
| 9 | Otro |
(4) Modo de control
| 3 | Control PID/ON-OFF |
(5) Opción de salida 1
| 0 | Ninguno |
| 1 | Relé resistivo de 2 A/240 V CA |
| 2 | Unidad SSR con capacidad nominal de 20 mA/24 V |
| 3 | 4-20 mA lineal, carga máxima 500 ohmios (módulo OM93-1) |
| 4 | 0-20 mA lineal, carga máxima 500 ohmios (módulo OM93-2) |
| 5 | 0-10 V lineal, impedancia mínima 500 K ohmios (módulo OM93-3) |
| 9 | Otro |
(6) Opción de salida 2
| 0 | Ninguno |
(7) Opción de alarma
| 0 | Ninguno |
| 1 | Relé resistivo de 2 A/240 V CA |
| 9 | Otro |
(8) Comunicación
| 0 | Ninguno |
DESCRIPCIÓN DEL PANEL FRONTAL RANGO DE ENTRADA Y PRECISIÓN
RANGO DE ENTRADA Y PRECISIÓN
| IN | Sensor | Tipo de entrada | Rango (BC) | Exactitud |
| 0 | J | Hierro-Constantán | -50 a 999 a.C. | A2 aC |
| 1 | K | Cromel-Alumel | -50 a 1370 a.C. | A2 aC |
| 2 | T | Cobre-Constantán | -270 a 400 a.C. | A2 aC |
| 3 | E | Cromel-Constantán | -50 a 750 a.C. | A2 aC |
| 4 | B | Pt30 % HR/Pt6 % HR | 300 a 1800 a. C. | A3 aC |
| 5 | R | Pt13%HR/Pt | 0 a 1750 a. C. | A2 aC |
| 6 | S | Pt10%HR/Pt | 0 a 1750 a. C. | A2 aC |
| 7 | N | Nicrosil-Nisil | -50 a 1300 a.C. | A2 aC |
| 8 | IDT (retroenlace) | PT100 ohmios (DIN) | -200 a 400 a.C. | A0.4 aC |
| 9 | IDT (retroenlace) | PT100 ohmios (JIS) | -200 a 400 a.C. | A0.4 aC |
| 10 | Lineal | -10mV a 60mV | -1999 a 9999 | A0.05% |
PRESUPUESTO
APORTE
| Termopar (T/C): | tipo J, K, T, E, B, R, S, N. |
| IDT: | RTD PT100 ohmios (DIN 43760/BS1904 o JIS) |
| Lineal: | -10 a 60 mV, atenuación de entrada configurable |
| Rango: | Configurable por el usuario, consulte la tabla anterior |
| Exactitud: | Consulte la tabla anterior |
| Compensación de unión fría: | 0.1 BC/BC ambiente típico |
| Protección contra rotura del sensor: | Modo de protección configurable |
| Resistencia externa: | 100 ohmios máx. |
| Rechazo del modo normal: | 60 dB |
| Rechazo de modo común: | 120 dB |
| Sample tasa: | 3 veces / segundo |
CONTROL
| Banda de proporción: | 0 – 200 a. C. (0-360 a. C.) |
| Reinicio (integral): | 0 – 3600 segundos |
| Tasa (derivada): | 0 – 1000 segundos |
| Ramp Tasa: | 0 – 200.0 BC /minuto (0 – 360.0 BF /minuto) |
| Habitar: | 0 – 3600 minutos |
| ENCENDIDO APAGADO: | Con histéresis ajustable (0-20% del SPAN) |
| Tiempo de ciclo: | 0-120 segundos |
| Acción de control: | Directo (para refrigeración) e inverso (para calefacción) |
| FUERZA | 90-264 V CA, 50/60 Hz, 10 VA 20-32VDC/VAC, 50/60Hz 10VA |
MEDIO AMBIENTE Y FÍSICO
| Seguridad: | UL 61010-1, 3.ª edición. CAN/CSA-C22.2 No. 61010-1(2012-05), 3ra Edición. |
| Emisión de EMC: | EN50081-1 |
| Inmunidad EMC: | EN50082-2 |
| Temperatura de funcionamiento: | -10 a 50 a.C. |
| Humedad: | 0 a 90 % HR (sin condensación) |
| Aislamiento: | 20 M ohmios mín. (500 VCC) |
| Descomponer: | CA 2000 V, 50/60 Hz, 1 minuto |
| Vibración: | 10 – 55 Hz, amplongitud 1 mm |
| Choque: | 200 m/s (20 g) |
| Peso neto: | 170 gramos |
| Materiales de vivienda: | Plástico de policarbonato |
| Altitud: | Menos de 2000 m |
| Uso en interiores | |
| sobrevoltajetagCategoría e | II |
| Grado de contaminación: | 2 |
| Fluctuaciones de voltaje de entrada de energía: | 10% del volumen nominaltage |
INSTALACIÓN
6.1 DIMENSIONES Y RECORTE DEL PANEL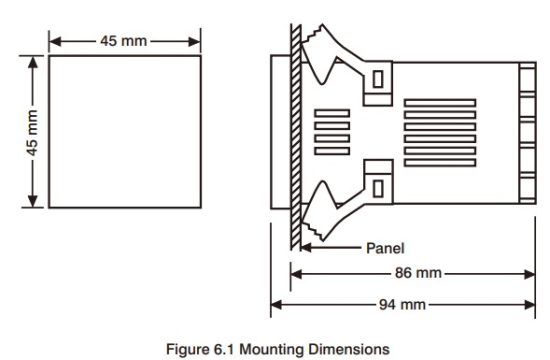 6.2 DIAGRAMA DE CABLEADO
6.2 DIAGRAMA DE CABLEADO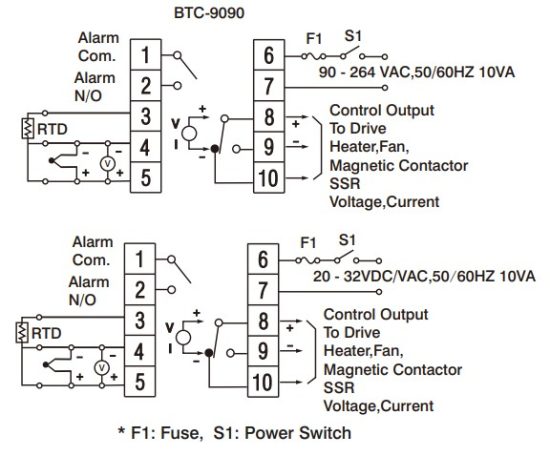
CALIBRACION
Nota: No continúe con esta sección a menos que exista una necesidad genuina de recalibrar el controlador. Se perderán todos los datos de calibración anteriores. No intente recalibrar a menos que tenga disponible el equipo de calibración adecuado. Si se pierden los datos de calibración, deberá devolver el controlador a su proveedor, quien puede cobrarle un cargo por la recalibración.
Antes de la calibración, asegúrese de que todos los ajustes de los parámetros sean correctos (tipo de entrada, C/F, resolución, rango bajo, rango alto).
- Retire el cableado de entrada del sensor y conecte un simulador de entrada estándar del tipo correcto a la entrada del controlador. Verifique que la polaridad sea correcta. Configure la señal simulada para que coincida con la señal de proceso baja (por ejemplo, cero grados).
- Utilice la tecla de desplazamiento hasta que aparezca "
 ” aparece en la pantalla PV. (Consulte 8.2)
” aparece en la pantalla PV. (Consulte 8.2) - Utilice las teclas Arriba y Abajo hasta que la pantalla PV represente la entrada simulada.
- Presione la tecla de retorno durante al menos 6 segundos (máximo 16 segundos) y luego suéltela. Esto ingresa la cifra de calibración baja en la memoria no volátil del controlador.
- Presione y suelte la tecla de desplazamiento.
 ” aparece en la pantalla PV. Esto indica el punto de calibración alto.
” aparece en la pantalla PV. Esto indica el punto de calibración alto. - Aumente la señal de entrada simulada para que coincida con la señal de proceso alta 11 (por ejemplo, 100 grados).
- Utilice las teclas Arriba y Abajo hasta que la pantalla SV represente la entrada alta simulada.
- Presione la tecla de retorno durante al menos 6 segundos (máximo 16 segundos) y luego suéltela. Esto ingresa la cifra de calibración alta en la memoria no volátil del controlador.
- Apague la unidad, retire todo el cableado de prueba y reemplace el cableado del sensor (observando la polaridad).
OPERACIÓN
8.1 FUNCIONAMIENTO DEL TECLADO
* Con el equipo encendido, debe esperar 12 segundos para memorizar los nuevos valores de los parámetros una vez cambiados.
| TECLAS TÁCTILES | FUNCIÓN | DESCRIPCIÓN |
| Tecla de desplazamiento | Avance la pantalla de índice a la posición deseada. El índice avanza de forma continua y cíclica presionando esta tecla. | |
| Tecla arriba | Aumenta el parámetro | |
| Tecla abajo | Disminuye el parámetro | |
| Tecla de retorno | Restablece el controlador a su estado normal. También detiene el ajuste automático y el porcentaje de salida.tagMonitoreo y operación en modo manual. | |
| Prensa | Pergamino largo | Permite inspeccionar o cambiar más parámetros. |
| Prensa | Retorno largo | 1. Ejecuta la función de autoajuste 2. Calibra el control cuando está en el nivel de calibración. |
| Prensa | Porcentaje de salidatagMonitoreo electrónico | Permite que la visualización del punto de ajuste indique el valor de salida de control. |
| Prensa | Ejecución en modo manual | Permite que el controlador ingrese al modo manual. |
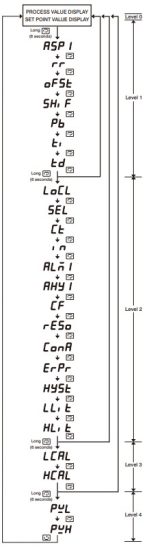
8.2 DIAGRAMA DE FLUJO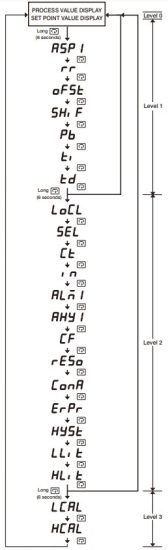 La tecla “retorno” se puede presionar en cualquier momento.
La tecla “retorno” se puede presionar en cualquier momento.
Esto hará que la pantalla regrese al valor del proceso/valor del punto de ajuste.
Potencia aplicada:
 Se muestra durante 4 segundos. (Versión de software 3.6 o superior)
Se muestra durante 4 segundos. (Versión de software 3.6 o superior) Prueba de LED. Todos los segmentos de LED deben estar encendidos durante 4 segundos.
Prueba de LED. Todos los segmentos de LED deben estar encendidos durante 4 segundos.- Se indica el valor del proceso y el punto de ajuste.
8.3 DESCRIPCIÓN DE PARÁMETROS
| CÓDIGO DE ÍNDICE | DESCRIPCIÓN RANGO DE AJUSTE | **CONFIGURACIÓN PREDETERMINADA | ||
| SV | Control del valor del punto de ajuste *Valor de límite inferior a límite superior | Indefinido | ||
| Valor del punto de ajuste de alarma *Valor de límite bajo a límite altoue. if * 0 a 3600 minutos (si * Límite bajo mínimos punto de ajuste al límite alto menos el valor del punto de ajuste (si | 200 a. C. | |||
| Ramp Tasa para el valor del proceso para limitar un cambio abrupto del proceso (Arranque suave) * 0 a 200.0 BC (360.0 BF) / minuto (si * 0 a 3600 unidades/minuto (si | 0 aC/min. | |||
| Valor de compensación para reinicio manual (si | 0.0 % | |||
| Desplazamiento de compensación para el valor del proceso * -111 a. C. a 111 a. C. | 0 a. C. | |||
| Banda proporcional * 0 a 200 BC (establecido en 0 para control de encendido y apagado) | 10 a. C. | |||
| Tiempo integral (de reinicio) * 0 a 3600 segundos | 120 segundos. | |||
| Tiempo derivado (tasa) * 0 a 360.0 segundos | 30 segundos. | |||
| Modo local 0: No se pueden cambiar los parámetros de control 1: Se pueden cambiar los parámetros de control | 1 | |||
| Selección de parámetros (permite seleccionar parámetros adicionales para que sean accesibles en el nivel de seguridad 0) | 0 | |||
| Tiempo de ciclo proporcional * 0 a 120 segundos | Relé | 20 | ||
| Vol pulsadotage | 1 | |||
| Voltio/mA lineal | 0 | |||
| Selección del modo de entrada 0: Termómetro tipo J 6: Termómetro tipo S 1: Termómetro tipo K 7: Termómetro tipo N 2: Termistor tipo T 8: PT100 ESTRUENDO 3: Termopar tipo E 9: PT100 JIS 4: Tipo B T/C 10: Vol linealtage o Corriente 5: T/C tipo R Nota: T/C-Cerrar espacio de soldadura G5, RTD-Abrir G5 | Términos y condiciones | 0 | ||
| IDT (retroenlace) | 8 | |||
| Lineal | 10 | |||
| Selección del modo de alarma 0: Alarma alta de proceso 8: Alarma fuera de banda 1: Alarma de proceso bajo 9: Alarma en banda 2: Alarma de desviación alta 10: Inhibir alarma fuera de banda 3: Alarma baja de desviación 11: Inhibir alarma dentro de banda 4: Inhibir alarma alta de proceso 12: Relé de alarma desactivado como 5: Inhibir alarma baja de proceso Tiempo de espera fuera 6: Inhibir desviación de alarma alta 13: Relé de alarma activado como 7: Inhibir desviación de alarma baja Tiempo de espera de espera | 0 | |||
| Histéresis de la alarma 1 * 0 a 20% del SPAN | 0.5% | |||
| Selección BC/BF 0: BF, 1: BC | 1 | |||
| Selección de resolución 0: Sin punto decimal 2: decimal de 2 dígitos 1: decimal de 1 dígitos 3: decimal de 3 dígitos (2 y 3 solo se pueden usar para volumen lineal)tage o corriente | 0 | |||
| Acción de control 0: Acción directa (enfriamiento) 1: Acción inversa (calor) | 1 | |||
| Protección contra errores 0: Control APAGADO, Alarma APAGADA 2: Control ENCENDIDO, Alarma APAGADA 1: Control APAGADO, Alarma ENCENDIDA 3: Control ENCENDIDO, Alarma ENCENDIDA | 1 | |||
| Histéresis para control ON/OFF *0 a 20 % del SPAN | 0.5% | |||
| Límite inferior de rango | -50 a. C. | |||
| Límite alto de rango | 1000 a. C. | |||
| Figura de calibración baja | 0 a. C. | |||
| Figura de calibración alta | 800 a. C. | |||
NOTAS: * Rango de ajuste del parámetro
** Ajustes de fábrica. Las alarmas de proceso se establecen en puntos de temperatura fijos. Las alarmas de desviación se mueven con el valor de los puntos de ajuste.
8.4 SINTONIZACIÓN AUTOMÁTICA
- Asegúrese de que el controlador esté configurado e instalado correctamente.
- Asegúrese de que la banda proporcional 'Pb' no esté establecida en '0'.
- Pulse la tecla de retorno durante al menos 6 segundos (máximo 16 segundos). Esto inicializa la función de sintonización automática. (Para cancelar el procedimiento de sintonización automática, pulse la tecla de retorno y suéltela).
- El punto decimal en la esquina inferior derecha de la pantalla PV parpadea para indicar que el ajuste automático está en curso. El ajuste automático se completa cuando deja de parpadear.
- Según el proceso en particular, la sintonización automática puede tardar hasta dos horas. Los procesos con retrasos prolongados serán los que más tarden en sintonizarse. Recuerde que, mientras el punto de la pantalla parpadea, el controlador se está sintonizando automáticamente.
NOTA: Si se produce un error AT( ![]() ), el proceso de sintonización automática se interrumpe debido a que el sistema opera en control ON-OFF (PB=0).
), el proceso de sintonización automática se interrumpe debido a que el sistema opera en control ON-OFF (PB=0).
El proceso también se interrumpirá si el punto de ajuste se establece demasiado cerca de la temperatura del proceso o si no hay suficiente capacidad en el sistema para alcanzar el punto de ajuste (por ejemplo, potencia de calentamiento inadecuada disponible). Una vez completado el ajuste automático, las nuevas configuraciones de PID se ingresan automáticamente en la memoria no volátil del controlador.
8.5 AJUSTE MANUAL DEL PID
Si bien la función de ajuste automático selecciona configuraciones de control que deberían resultar satisfactorias para la mayoría de los procesos, es posible que sea necesario realizar ajustes a estas configuraciones arbitrarias de vez en cuando. Este puede ser el caso si se realizan algunos cambios en el proceso o si desea "afinar" las configuraciones de control.
Es importante que antes de realizar cambios en los parámetros de control, registre los parámetros actuales para futuras referencias. Realice cambios leves en un solo parámetro a la vez y observe los resultados en el proceso. Debido a que cada uno de los parámetros interactúa con los demás, es fácil confundirse con los resultados si no está familiarizado con los procedimientos de control de procesos.
GUÍA DE SINTONIZACIÓN
Banda proporcional
| Síntoma | Solución |
| Respuesta lenta | Disminuir el valor de PB |
| Sobreimpulsos elevados u oscilaciones | Aumentar el valor de PB |
Tiempo Integral (Reinicio)
| Síntoma | Solución |
| Respuesta lenta | Disminuir el tiempo integral |
| Inestabilidad u Oscilaciones | Aumentar el tiempo integral |
Tiempo derivado (tasa)
| Síntoma | Solución |
| Respuesta lenta u oscilaciones | Disminuir tiempo de derivación |
| Sobreimpulso alto | Aumentar el tiempo de derivación |
8.6 PROCEDIMIENTO DE SINTONIZACIÓN MANUAL
Paso 1: Ajuste los valores integrales y derivados a 0. Esto inhibe la acción de velocidad y reinicio.
Paso 2: Establezca un valor arbitrario de banda proporcional y controle los resultados del control
Paso 3: Si la configuración original introduce una gran oscilación del proceso, aumente gradualmente la banda proporcional hasta que se produzca un ciclo constante. Registre este valor de banda proporcional (Pc).
Paso 4: Medir el período de ciclo constante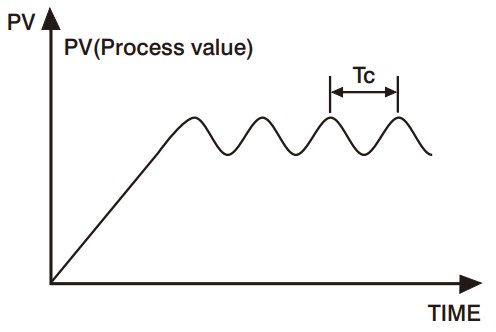 Registre este valor (Tc) en segundos
Registre este valor (Tc) en segundos
Paso 5: Los ajustes de control se determinan de la siguiente manera:
Banda de proporción (PB) = 1.7 Pc
Tiempo Integral (TI)=0.5 Tc
Tiempo derivado (TD) = 0.125 Tc
8.7 RAMP & HABITAR
El controlador BTC-9090 se puede configurar para actuar como un controlador de punto de ajuste fijo o como un controlador único.amp controlador al encenderse. Esta función permite al usuario establecer un tiempo de respuesta predeterminado.amp velocidad para permitir que el proceso alcance gradualmente la temperatura establecida, produciendo así una función de 'Arranque suave'.
El BTC-9090 incorpora un temporizador de permanencia y el relé de alarma se puede configurar para proporcionar una función de permanencia para usar junto con el relé de alarma.amp función.
El ramp La tasa está determinada por ' ![]() ' parámetro que se puede ajustar en el rango de 0 a 200.0 BC/minuto. El ramp La función de velocidad está deshabilitada cuando '
' parámetro que se puede ajustar en el rango de 0 a 200.0 BC/minuto. El ramp La función de velocidad está deshabilitada cuando ' ![]() El parámetro ' se establece en ' 0 '.
El parámetro ' se establece en ' 0 '.
La función de remojo se habilita configurando la salida de alarma para que actúe como un temporizador de permanencia. El parámetro ![]() debe configurarse en el valor 12. El contacto de alarma ahora funcionará como un contacto de temporizador, cerrándose al encender y abriéndose después del tiempo transcurrido establecido en el parámetro
debe configurarse en el valor 12. El contacto de alarma ahora funcionará como un contacto de temporizador, cerrándose al encender y abriéndose después del tiempo transcurrido establecido en el parámetro![]() .
.
Si la fuente de alimentación o la salida del controlador están conectadas a través del contacto de alarma, el controlador funcionará como un controlador de remojo garantizado.
En el example debajo de la Ramp La velocidad se establece en 5 BC/minuto. ![]() = 12 y
= 12 y ![]() =15 (minutos). Se aplica energía en el tiempo cero y el proceso asciende a 5 BC/minuto hasta el punto de ajuste de 125 BC. Al alcanzar el punto de ajuste, se activa el temporizador de permanencia y después del tiempo de remojo de 15 minutos, se abrirá el contacto de alarma, apagando la salida. La temperatura del proceso finalmente caerá a una velocidad indeterminada.
=15 (minutos). Se aplica energía en el tiempo cero y el proceso asciende a 5 BC/minuto hasta el punto de ajuste de 125 BC. Al alcanzar el punto de ajuste, se activa el temporizador de permanencia y después del tiempo de remojo de 15 minutos, se abrirá el contacto de alarma, apagando la salida. La temperatura del proceso finalmente caerá a una velocidad indeterminada.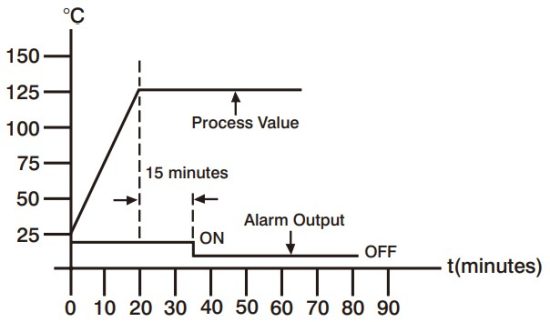 La función de permanencia se puede utilizar para operar un dispositivo externo, como una sirena, para alertar cuando se ha alcanzado un tiempo de remojo.
La función de permanencia se puede utilizar para operar un dispositivo externo, como una sirena, para alertar cuando se ha alcanzado un tiempo de remojo.
Debe configurarse en el valor 13. El contacto de alarma funcionará ahora como un contacto de temporizador, y el contacto estará abierto en el arranque inicial. El temporizador comienza a contar hacia atrás una vez que se alcanza la temperatura del punto de ajuste. Una vez que transcurre el tiempo de ajuste, el contacto de alarma se cierra.
MENSAJES DE ERROR
| Síntoma | Causa(s) | solución(es) |
| Error de rotura del sensor | Reemplazar RTD o sensor Utilice el modo de operación manual | |
| Visualización del proceso más allá del punto de ajuste de rango bajo | Reajustar valor | |
| Visualización del proceso más allá del punto de ajuste de rango alto | Reajustar valor | |
| Daño en módulo híbrido analógico | Reemplace el módulo. Verifique si hay una fuente externa de daño, como voltaje transitorio.tage picos | |
| Funcionamiento incorrecto del procedimiento de autoajuste Prop. Band establecido en 0 | Repita el procedimiento. Aumente la banda proporcional a un número mayor que 0. | |
| El modo manual no está permitido para un sistema de control ON-OFF | Aumentar banda proporcional | |
| Error de suma de comprobación; los valores en la memoria pueden haber cambiado accidentalmente | Comprobar y reconfigurar los parámetros de control |
Instrucciones complementarias para la nueva versión
La unidad con versión de firmware V3.7 tiene dos parámetros adicionales: “PVL” y “PVH”, ubicados en el nivel 4 como diagrama de flujo de parámetros en el lado izquierdo.
Cuando se necesita cambiar el valor LLit a un valor más alto o cambiar el valor HLit a un valor más bajo, se deben seguir los siguientes procedimientos para que el valor PVL sea equivalente a una décima parte del valor LCAL y el valor PVH sea equivalente a una décima parte del valor HCAL. De lo contrario, los valores del proceso medidos estarán fuera de especificación.
- Utilice la tecla de desplazamiento hasta que aparezca “LLit” en la pantalla PV. Utilice las teclas Arriba y Abajo para establecer el valor de LLit en un valor más alto que el valor original.
- Presione y suelte la tecla de desplazamiento; luego, aparecerá “HLit” en la pantalla PV. Use las teclas Arriba y Abajo para configurar el valor de HLit en un valor inferior al valor original.
- Apague y encienda el dispositivo.
- Utilice la tecla de desplazamiento hasta que aparezca “LCAL” en la pantalla PV. Anote el valor LCAL.
- Presione y suelte la tecla de desplazamiento. Luego, aparecerá “HCAL” en la pantalla PV. Tome nota del valor de HCAL.
- Presione la tecla de desplazamiento durante al menos 6 segundos y luego suéltela. Aparecerá “PVL” en la pantalla PV. Use las teclas ARRIBA y Abajo para establecer el valor PVL en una décima parte del valor LCAL.
- Presione y suelte la tecla de desplazamiento. En la pantalla PV aparece “PVH”. Use las teclas ARRIBA y Abajo para establecer el valor PVH en una décima parte del valor HCAL.
-Instale un disyuntor de 20 A en el extremo de la fuente de alimentación.
-Para quitar el polvo utilice un paño seco.
-La instalación y la seguridad de cualquier sistema que incorpore el equipo es responsabilidad del ensamblador del sistema.
-Si el equipo se utiliza de una manera no especificada por el fabricante, la protección proporcionada por el equipo puede verse afectada.
No cubra las rejillas de ventilación para mantener el flujo de aire.
Tenga cuidado de no apretar demasiado los tornillos de los terminales. El par de torsión no debe superar los 1 Nm (14 lb-in o 10 kgF-cm), temperatura mínima de 11.52 °C, utilice solo conductores de cobre.
A excepción del cableado del termopar, todo el cableado debe utilizar un conductor de cobre trenzado con un calibre máximo de 18 AWG.
GARANTÍA
Brainchild Electronic Co., Ltd. se complace en ofrecer sugerencias sobre el uso de sus diversos productos.
Sin embargo, Brainchild no ofrece garantías ni declaraciones de ningún tipo con respecto a la idoneidad para el uso o la aplicación de sus productos por parte del Comprador. La selección, aplicación o uso de los productos Brainchild es responsabilidad del Comprador. No se permitirán reclamos por daños o pérdidas, ya sean directos, indirectos, incidentales, especiales o consecuentes. Las especificaciones están sujetas a cambios sin previo aviso. Además, Brainchild se reserva el derecho de realizar cambios, sin notificación al Comprador, en los materiales o el procesamiento que no afecten el cumplimiento de ninguna especificación aplicable. Los productos Brainchild tienen garantía de estar libres de defectos de material y mano de obra durante 18 meses después de la entrega al primer comprador para su uso. Se puede solicitar un período extendido con un costo adicional. La única responsabilidad de Brainchild bajo esta garantía, a opción de Brainchild, se limita al reemplazo o reparación, sin cargo, o al reembolso del precio de compra dentro del período de garantía especificado. Esta garantía no se aplica a los daños resultantes del transporte, la alteración, el mal uso o el abuso.
DEVOLUCIONES
No se aceptará ninguna devolución de productos sin un formulario de Autorización de devolución de material (RMA) completo.
NOTA:
La información contenida en este manual del usuario está sujeta a cambios sin previo aviso.
Copyright © 2023, The Brainchild Electronic Co., Ltd., todos los derechos reservados. Ninguna parte de esta publicación puede ser reproducida, transmitida, transcrita o almacenada en un sistema de recuperación, o traducida a ningún idioma en ninguna forma y por ningún medio sin el permiso por escrito de Brainchild Electronic Co., Ltd.
![]() Para cualquier necesidad de reparación o mantenimiento, póngase en contacto con nosotros.
Para cualquier necesidad de reparación o mantenimiento, póngase en contacto con nosotros.
Electrónica Co., Ltd.
No 209, Chung Yang Rd., Distrito de Nan Kang,
Taipei 11573, Taiwán
Teléfono: 886-2-27861299
Teléfono: 886-2-27861395
web sitio: http://www.brainchildtw.com![]()
Documentos / Recursos
 | Controlador basado en microprocesador de lógica difusa BrainChild BTC-9090 [pdf] Manual de instrucciones BTC-9090, BTC-9090 G UL, BTC-9090 Controlador basado en microprocesador de lógica difusa, Controlador basado en microprocesador de lógica difusa, Controlador basado en microprocesador, Controlador basado en procesador, Controlador basado |