![]() ตัวควบคุมที่ใช้ไมโครโปรเซสเซอร์ฟัซซี่ลอจิก BTC-9090
ตัวควบคุมที่ใช้ไมโครโปรเซสเซอร์ฟัซซี่ลอจิก BTC-9090
คู่มือการใช้งาน
การแนะนำ
คู่มือนี้มีข้อมูลสำหรับการติดตั้งและการทำงานของคอนโทรลเลอร์ที่ใช้ไมโครโปรเซสเซอร์ Fuzzy Logic รุ่น Brainchild BTC-9090
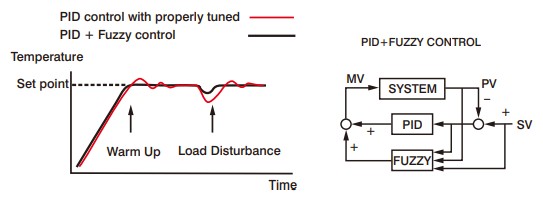
ฟัซซีลอจิกเป็นคุณสมบัติที่สำคัญของตัวควบคุมอเนกประสงค์นี้ แม้ว่าการควบคุม PID จะได้รับการยอมรับอย่างกว้างขวางจากอุตสาหกรรมต่างๆ แต่การควบคุม PID ก็ยังยากที่จะทำงานร่วมกับระบบที่ซับซ้อนบางระบบได้อย่างมีประสิทธิภาพ เช่นampระบบลำดับที่สอง ความล่าช้านาน จุดตั้งค่าต่างๆ โหลดต่างๆ ฯลฯ เนื่องจากข้อเสียtagเนื่องจากหลักการควบคุมและค่าคงที่ของการควบคุม PID ทำให้การควบคุมระบบที่มีตัวแปรมากมายไม่มีประสิทธิภาพ และผลลัพธ์ที่ได้ก็สร้างความหงุดหงิดให้กับระบบบางระบบอย่างเห็นได้ชัด การควบคุมฟัซซีลอจิกสามารถเอาชนะข้อเสียได้tagการควบคุม PID สามารถควบคุมระบบได้อย่างมีประสิทธิภาพด้วยประสบการณ์ที่เคยมีมาก่อน ฟังก์ชันของฟัซซี่ลอจิกคือการปรับค่า PID โดยอ้อมเพื่อให้ค่าเอาต์พุตของการควบคุม MV ปรับได้อย่างยืดหยุ่นและรวดเร็วตามกระบวนการต่างๆ ด้วยวิธีนี้ จึงทำให้กระบวนการสามารถไปถึงจุดที่กำหนดไว้ล่วงหน้าได้ในเวลาอันสั้นที่สุดโดยมีการโอเวอร์ชูตน้อยที่สุดระหว่างการปรับแต่งหรือการรบกวนจากภายนอก แตกต่างจากการควบคุม PID ที่ใช้ข้อมูลดิจิทัล ฟัซซี่ลอจิกเป็นการควบคุมด้วยข้อมูลภาษา
นอกจากนี้เครื่องมือนี้ยังมีฟังก์ชั่นเดี่ยวtagเอ่อamp และการทำงานในโหมด Dwell, Autotuning และ Manual ความสะดวกในการใช้งานถือเป็นคุณสมบัติที่สำคัญ
ระบบการนับเลข
หมายเลขรุ่น ![]() (1) กำลังไฟเข้า
(1) กำลังไฟเข้า
| 4 | 90-264VAC |
| 5 | 20-32VAC/VDC |
| 9 | อื่น |
(2) สัญญาณอินพุต
1 0 – 5V 3 PT100 DIN 5 TC 7 0 – 20mA 8 0 – 10V
(3) รหัสช่วง
| 1 | สามารถกำหนดค่าได้ |
| 9 | อื่น |
(4) โหมดการควบคุม
| 3 | การควบคุม PID / เปิด-ปิด |
(5) เอาท์พุต 1 ตัวเลือก
| 0 | ไม่มี |
| 1 | รีเลย์แบบต้านทาน 2A/240VAC |
| 2 | SSR ไดรฟ์ที่ได้รับการจัดอันดับ 20mA/24V |
| 3 | กระแสตรง 4-20mA โหลดสูงสุด 500 โอห์ม (โมดูล OM93-1) |
| 4 | กระแสตรง 0-20mA โหลดสูงสุด 500 โอห์ม (โมดูล OM93-2) |
| 5 | 0-10V เชิงเส้น ความต้านทานขั้นต่ำ 500K โอห์ม (โมดูล OM93-3) |
| 9 | อื่น |
(6) เอาท์พุต 2 ตัวเลือก
| 0 | ไม่มี |
(7) ตัวเลือกการแจ้งเตือน
| 0 | ไม่มี |
| 1 | รีเลย์แบบต้านทาน 2A/240VAC |
| 9 | อื่น |
(8) การสื่อสาร
| 0 | ไม่มี |
คำอธิบายแผงด้านหน้า
 ช่วงอินพุตและความแม่นยำ
ช่วงอินพุตและความแม่นยำ
| IN | เซ็นเซอร์ | ประเภทอินพุต | ช่วง( BC ) | ความแม่นยำ |
| 0 | J | เหล็กคอนสแตนตัน | -50 ถึง 999 ปีก่อนคริสตกาล | ก2 ก่อนคริสต์ศักราช |
| 1 | K | โครเมล-อลูเมล | -50 ถึง 1370 ปีก่อนคริสตกาล | ก2 ก่อนคริสต์ศักราช |
| 2 | T | ทองแดง-คอนสแตนตัน | -270 ถึง 400 ปีก่อนคริสตกาล | ก2 ก่อนคริสต์ศักราช |
| 3 | E | โครเมล-คอนสแตนตัน | -50 ถึง 750 ปีก่อนคริสตกาล | ก2 ก่อนคริสต์ศักราช |
| 4 | B | ความชื้นสัมพัทธ์ Pt30%/ความชื้นสัมพัทธ์ Pt6% | 300 ถึง 1800 ปีก่อนคริสตกาล | ก3 ก่อนคริสต์ศักราช |
| 5 | R | พีที13%RH/พีที | 0 ถึง 1750 ปีก่อนคริสตกาล | ก2 ก่อนคริสต์ศักราช |
| 6 | S | พีที10%RH/พีที | 0 ถึง 1750 ปีก่อนคริสตกาล | ก2 ก่อนคริสต์ศักราช |
| 7 | N | นิโครซิล-นิซิล | -50 ถึง 1300 ปีก่อนคริสตกาล | ก2 ก่อนคริสต์ศักราช |
| 8 | รีทีดี | PT100 โอห์ม (DIN) | -200 ถึง 400 ปีก่อนคริสตกาล | ก0.4 ก่อนคริสต์ศักราช |
| 9 | รีทีดี | PT100 โอห์ม (JIS) | -200 ถึง 400 ปีก่อนคริสตกาล | ก0.4 ก่อนคริสต์ศักราช |
| 10 | เชิงเส้น | -10mV ถึง 60mV | -1999 ถึง 9999 | เอ 0.05% |
ข้อมูลจำเพาะ
ป้อนข้อมูล
| เทอร์โมคัปเปิล (T/C): | ประเภท J, K, T, E, B, R, S, N |
| รี้ด: | PT100 โอห์ม RTD (DIN 43760/BS1904 หรือ JIS) |
| เชิงเส้น: | -10 ถึง 60 mV การลดทอนอินพุตที่กำหนดค่าได้ |
| พิสัย: | ผู้ใช้สามารถปรับแต่งได้ โปรดดูตารางด้านบน |
| ความแม่นยำ: | ดูตารางด้านบน |
| ค่าตอบแทนชุมทางเย็น: | 0.1 BC/ BC สภาพแวดล้อมทั่วไป |
| การป้องกันการแตกของเซ็นเซอร์: | โหมดการป้องกันที่กำหนดค่าได้ |
| ความต้านทานภายนอก: | สูงสุด 100 โอห์ม |
| การปฏิเสธโหมดปกติ: | 60 เดซิเบล |
| การปฏิเสธโหมดทั่วไป: | 120เดซิเบล |
| Sampเลออัตรา: | 3 ครั้ง / วินาที |
ควบคุม
| แถบสัดส่วน: | 0 – 200 ปีก่อนคริสตกาล ( 0-360 ปีก่อนคริสตกาล) |
| รีเซ็ต (อินทิกรัล): | 0 – 3600 วินาที |
| อัตรา (อนุพันธ์): | 0 – 1000 วินาที |
| Ramp ประเมิน: | 0 – 200.0 ปีก่อนคริสตกาล / นาที (0 – 360.0 BF / นาที) |
| อยู่อาศัย: | 0 – 3600 นาที |
| เปิดปิด: | พร้อมฮิสเทอรีซิสปรับได้ (0-20% ของ SPAN) |
| ระยะเวลาการทำงาน: | 0-120 วินาที |
| การควบคุมการกระทำ: | แบบตรง (สำหรับระบายความร้อน) และแบบย้อนกลับ (สำหรับทำความร้อน) |
| พลัง | 90-264VAC, 50/60Hz 10VA แรงดันไฟฟ้า 20-32VDC/VAC, 50/60Hz 10VA |
สิ่งแวดล้อมและกายภาพ
| ความปลอดภัย: | UL 61010-1, ฉบับที่ 3 CAN/CSA-C22.2 No. 61010-1(2012-05), พิมพ์ครั้งที่ 3 |
| การปล่อยอีเอ็มซี: | EN50081-1 |
| ภูมิคุ้มกัน EMC: | EN50082-2 |
| อุณหภูมิในการทำงาน: | -10 ถึง 50 ปีก่อนคริสตกาล |
| ความชื้น: | ความชื้นสัมพัทธ์ 0 ถึง 90% (ไม่มีการเข้ารหัส) |
| ฉนวนกันความร้อน: | ขั้นต่ำ 20M โอห์ม ( 500 VDC ) |
| การแยกรายละเอียด: | AC 2000V, 50/60 Hz, 1 นาที |
| การสั่นสะเทือน: | 10 – 55 เฮิรตซ์ ampความสูง 1 มม. |
| ช็อก: | 200 ม./วินาที (20ก.) |
| น้ำหนักสุทธิ: | 170 กรัม |
| วัสดุที่อยู่อาศัย: | พลาสติกโพลีคาร์บอเนต |
| ระดับความสูง: | น้อยกว่า 2000 ม. |
| การใช้ภายในอาคาร | |
| โอเวอร์โวลtagหมวดหมู่อี | II |
| ระดับมลพิษ: | 2 |
| ความผันผวนของแรงดันไฟเข้า: | 10% ของปริมาณที่กำหนดtage |
การติดตั้ง
6.1 ขนาดและช่องเจาะแผง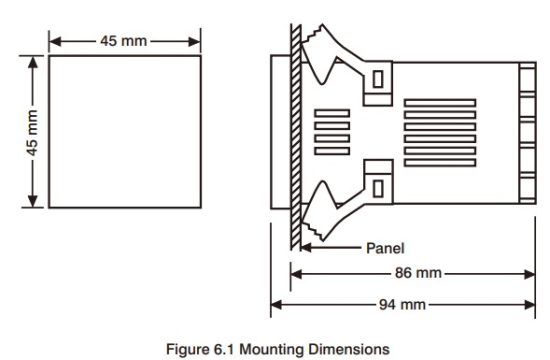 6.2 แผนผังสายไฟ
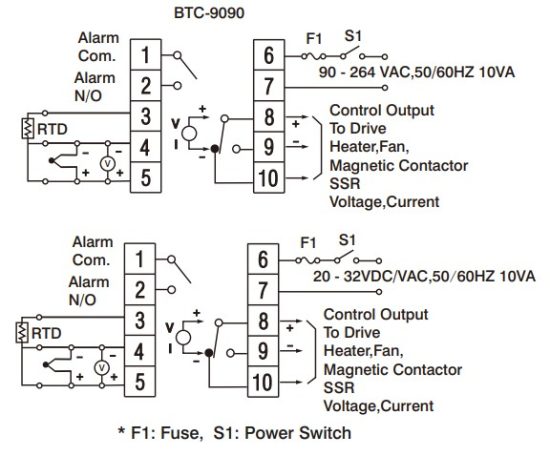
6.2 แผนผังสายไฟ
สอบเทียบ
บันทึก: อย่าดำเนินการต่อในส่วนนี้ เว้นแต่มีความจำเป็นจริง ๆ ที่จะต้องปรับเทียบตัวควบคุมใหม่ วันที่ปรับเทียบก่อนหน้าทั้งหมดจะสูญหาย อย่าพยายามปรับเทียบใหม่ เว้นแต่คุณจะมีอุปกรณ์ปรับเทียบที่เหมาะสม หากข้อมูลการปรับเทียบสูญหาย คุณจะต้องส่งคืนตัวควบคุมให้กับซัพพลายเออร์ของคุณ ซึ่งอาจเรียกเก็บค่าธรรมเนียมสำหรับการปรับเทียบใหม่
ก่อนการสอบเทียบ ให้แน่ใจว่าการตั้งค่าพารามิเตอร์ทั้งหมดถูกต้อง (ประเภทอินพุต, C/F, ความละเอียด, ช่วงต่ำ, ช่วงสูง)
- ถอดสายอินพุตเซ็นเซอร์ออกและเชื่อมต่อเครื่องจำลองอินพุตมาตรฐานประเภทที่ถูกต้องกับอินพุตของตัวควบคุม ตรวจสอบขั้วที่ถูกต้อง ตั้งค่าสัญญาณจำลองให้ตรงกับสัญญาณกระบวนการต่ำ (เช่น ศูนย์องศา)
- ใช้ปุ่มเลื่อนจนกระทั่ง "
 ” ปรากฏบนจอแสดงผล PV (ดู 8.2)
” ปรากฏบนจอแสดงผล PV (ดู 8.2) - ใช้ปุ่มขึ้นและลงจนกระทั่งจอแสดงผล PV จะแสดงอินพุตจำลอง
- กดปุ่ม Return ค้างไว้ 6 วินาที (สูงสุด 16 วินาที) แล้วปล่อย ปุ่มนี้จะป้อนค่าการปรับเทียบต่ำลงในหน่วยความจำถาวรของตัวควบคุม
- กดและปล่อยปุ่มเลื่อน”
 ” จะปรากฏบนจอแสดงผล PV ซึ่งระบุจุดสอบเทียบสูง
” จะปรากฏบนจอแสดงผล PV ซึ่งระบุจุดสอบเทียบสูง - เพิ่มสัญญาณอินพุตจำลองให้สอดคล้องกับสัญญาณกระบวนการสูง (เช่น 11 องศา)
- ใช้ปุ่มขึ้นและลงจนกระทั่งจอแสดงผล SV จะแสดงอินพุตสูงที่จำลองไว้
- กดปุ่ม Return ค้างไว้ 6 วินาที (สูงสุด 16 วินาที) แล้วปล่อย ปุ่มนี้จะป้อนค่าการปรับเทียบขั้นสูงลงในหน่วยความจำถาวรของตัวควบคุม
- ปิดเครื่อง ถอดสายทดสอบทั้งหมดออก และเปลี่ยนสายเซ็นเซอร์ (สังเกตขั้ว)
การดำเนินการ
8.1 การใช้งานแป้นพิมพ์
* เมื่อเปิดเครื่องต้องรอ 12 วินาทีเพื่อบันทึกค่าพารามิเตอร์ใหม่ที่มีการเปลี่ยนแปลง
| ปุ่มสัมผัส | การทำงาน | คำอธิบาย |
| ปุ่มเลื่อน | เลื่อนการแสดงดัชนีไปยังตำแหน่งที่ต้องการ ดัชนีจะก้าวหน้าอย่างต่อเนื่องและเป็นวัฏจักรโดยการกดแป้นพิมพ์นี้ |
|
| อัพคีย์ | เพิ่มพารามิเตอร์ | |
| คีย์ลง | ลดค่าพารามิเตอร์ | |
| คีย์ย้อนกลับ | รีเซ็ตตัวควบคุมเป็นสถานะปกติ นอกจากนี้ยังหยุดการปรับจูนอัตโนมัติ เปอร์เซ็นต์เอาต์พุตtagการตรวจสอบและการดำเนินงานโหมดแมนนวล | |
| กด |
เลื่อนยาว | ช่วยให้สามารถตรวจสอบหรือเปลี่ยนแปลงพารามิเตอร์ได้มากขึ้น |
| กด |
การกลับมาครั้งยาว | 1. ดำเนินการฟังก์ชั่นปรับแต่งอัตโนมัติ 2. ปรับเทียบการควบคุมเมื่ออยู่ในระดับการปรับเทียบ |
| กด |
เปอร์เซ็นต์เอาท์พุตtagอี มอนิเตอร์ | อนุญาตให้การแสดงค่าจุดตั้งค่าระบุค่าเอาท์พุตการควบคุม |
| กด |
การดำเนินการโหมดแมนนวล | ช่วยให้ตัวควบคุมเข้าสู่โหมดแมนนวล |
8.2 แผนภูมิการไหล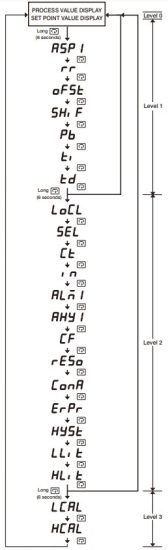 สามารถกดปุ่ม “Return” ได้ตลอดเวลา
สามารถกดปุ่ม “Return” ได้ตลอดเวลา
คำสั่งนี้จะแจ้งให้จอแสดงผลกลับสู่ค่ากระบวนการ/ค่าจุดตั้งค่า
กำลังที่ใช้:
 แสดงผลเป็นเวลา 4 วินาที (ซอฟต์แวร์เวอร์ชัน 3.6 ขึ้นไป)
แสดงผลเป็นเวลา 4 วินาที (ซอฟต์แวร์เวอร์ชัน 3.6 ขึ้นไป) การทดสอบ LED แต่ละส่วนต้องติดสว่างเป็นเวลา 4 วินาที
การทดสอบ LED แต่ละส่วนต้องติดสว่างเป็นเวลา 4 วินาที- ระบุค่ากระบวนการและจุดตั้งค่า
8.3 คำอธิบายพารามิเตอร์
| รหัสดัชนี | คำอธิบาย ช่วงการปรับ | **การตั้งค่าเริ่มต้น | ||
| SV | การควบคุมค่าจุดตั้งค่า *ค่าขีดจำกัดต่ำถึงค่าขีดจำกัดสูง |
ไม่ระบุ | ||
| ค่าจุดตั้งค่าสัญญาณเตือน * ขีดจำกัดต่ำถึงขีดจำกัดสูงue. if * 0 ถึง 3600 นาที (หาก * ขีดจำกัดต่ำสุดs ตั้งค่าจุดให้สูงที่สุด ลบค่าจุดตั้งค่า (ถ้า |
200 ปีก่อนคริสตกาล | |||
| Ramp อัตราค่ากระบวนการเพื่อจำกัดการเปลี่ยนแปลงกระบวนการกะทันหัน (Soft Start) * 0 ถึง 200.0 ปีก่อนคริสตกาล (360.0 BF) / นาที (ถ้า * 0 ถึง 3600 หน่วย / นาที (หาก |
0 ปีก่อนคริสตกาล / นาที | |||
| ค่าออฟเซ็ตสำหรับการรีเซ็ตด้วยตนเอง (ถ้า |
0.0% | |||
| การเปลี่ยนแปลงออฟเซ็ตสำหรับค่ากระบวนการ * -111 ปีก่อนคริสตกาล ถึง 111 ปีก่อนคริสตกาล |
0 ปีก่อนคริสตกาล | |||
| วงดนตรีตามสัดส่วน
* 0 ถึง 200 BC (ตั้งเป็น 0 เพื่อควบคุมการเปิด-ปิด) |
10 ปีก่อนคริสตกาล | |||
| เวลาอินทิกรัล (รีเซ็ต) * 0 ถึง 3600 วินาที |
120 วินาที | |||
| อนุพันธ์ (อัตรา) เวลา * 0 ถึง 360.0 วินาที |
30 วินาที | |||
| โหมดท้องถิ่น 0: ไม่สามารถเปลี่ยนพารามิเตอร์การควบคุมได้ 1: สามารถเปลี่ยนพารามิเตอร์การควบคุมได้ |
1 | |||
| การเลือกพารามิเตอร์ (อนุญาตให้เลือกพารามิเตอร์เพิ่มเติมที่สามารถเข้าถึงได้ในระดับความปลอดภัย 0) |
0 | |||
| เวลาการทำงานตามสัดส่วน * 0 ถึง 120 วินาที |
รีเลย์ | 20 | ||
| พัลส์ฉบับtage | 1 | |||
| โวลต์เชิงเส้น/mA | 0 | |||
| การเลือกโหมดอินพุต 0: ประเภท J T/C 6: ประเภท S T/C 1: ประเภท K T/C 7: ประเภท N T/C 2: ประเภท T T/C 8: PT100 ดิน 3: ประเภท E T/C 9: PT100 JIS 4: ชนิด B T/C 10: ปริมาตรเชิงเส้นtage หรือกระแส 5 : R ชนิด T/C หมายเหตุ: T/C-ปิดช่องว่างบัดกรี G5, RTD-เปิด G5 |
เงื่อนไขการชำระเงิน | 0 | ||
| รีทีดี | 8 | |||
| เชิงเส้น | 10 | |||
| การเลือกโหมดสัญญาณเตือน 0: สัญญาณเตือนกระบวนการสูง 8: สัญญาณเตือนแบบเอาท์แบนด์ 1: สัญญาณเตือนกระบวนการต่ำ 9: สัญญาณเตือนอินแบนด์ 2: สัญญาณเตือนการเบี่ยงเบนสูง 10: ยับยั้งสัญญาณเตือนเอาท์แบนด์ 3: สัญญาณเตือนความเบี่ยงเบนต่ำ 11: ยับยั้งสัญญาณเตือนอินแบนด์ 4: ยับยั้งสัญญาณเตือนกระบวนการสูง 12: รีเลย์สัญญาณเตือนปิดเป็น 5: ยับยั้งสัญญาณเตือนกระบวนการต่ำ เวลาพักหมดลง 6: ยับยั้งการเบี่ยงเบน สัญญาณเตือนระดับสูง 13: รีเลย์สัญญาณเตือนเปิดเป็น 7: ยับยั้งการเบี่ยงเบน สัญญาณเตือนระดับต่ำ เวลาพักหมดลง |
0 | |||
| ฮิสเทอรีซิสของสัญญาณเตือน 1 * 0 ถึง 20% ของ SPAN |
0.5% | |||
| การเลือก BC / BF 0: ก่อนคริสตกาล, 1: ก่อนคริสตกาล |
1 | |||
| การเลือกความละเอียด 0: ไม่มีจุดทศนิยม 2: ทศนิยม 2 หลัก 1: ทศนิยม 1 หลัก 3: ทศนิยม 3 หลัก (2 & 3 ใช้ได้เฉพาะกับปริมาตรเชิงเส้นเท่านั้นtagอีหรือกระแส |
0 |
|||
| การควบคุมการดำเนินการ 0: การทำงานโดยตรง (การระบายความร้อน) 1: การทำงานย้อนกลับ (ความร้อน) |
1 | |||
| การป้องกันข้อผิดพลาด 0: ปิดการควบคุม, ปิดสัญญาณเตือน 2: เปิดการควบคุม, ปิดสัญญาณเตือน 1: ปิดการควบคุม, เปิดสัญญาณเตือน 3: เปิดการควบคุม, เปิดสัญญาณเตือน |
1 |
|||
| ฮิสเทอรีซิสสำหรับการควบคุมเปิด/ปิด *0 ถึง 20% ของ SPAN |
0.5% | |||
| ขีดจำกัดช่วงต่ำ | -50 ปีก่อนคริสตกาล | |||
| ขีดจำกัดระยะสูง | 1000 ปีก่อนคริสตกาล | |||
| ตัวเลขการสอบเทียบต่ำ | 0 ปีก่อนคริสตกาล | |||
| ตัวเลขการสอบเทียบสูง | 800 ปีก่อนคริสตกาล | |||
หมายเหตุ: * การปรับช่วงของพารามิเตอร์
** การตั้งค่าจากโรงงาน สัญญาณเตือนกระบวนการจะอยู่ที่จุดอุณหภูมิคงที่ สัญญาณเตือนการเบี่ยงเบนจะเคลื่อนที่ตามค่าจุดที่ตั้งไว้
8.4 การปรับจูนอัตโนมัติ
- ตรวจสอบให้แน่ใจว่าตัวควบคุมได้รับการกำหนดค่าและติดตั้งอย่างถูกต้อง
- ตรวจสอบให้แน่ใจว่าแบนด์ตามสัดส่วน 'Pb' ไม่ได้ถูกตั้งเป็น '0'
- กดปุ่ม Return ค้างไว้ 6 วินาที (สูงสุด 16 วินาที) การดำเนินการนี้จะเริ่มต้นฟังก์ชันปรับจูนอัตโนมัติ (หากต้องการยกเลิกขั้นตอนการปรับจูนอัตโนมัติ ให้กดปุ่ม Return แล้วปล่อย)
- จุดทศนิยมที่มุมล่างขวาของจอแสดงผล PV จะกะพริบเพื่อระบุว่ากำลังปรับค่าอัตโนมัติ การปรับค่าอัตโนมัติจะเสร็จสมบูรณ์เมื่อการกะพริบหยุดลง
- การปรับอัตโนมัติอาจใช้เวลานานถึงสองชั่วโมงขึ้นอยู่กับกระบวนการเฉพาะ กระบวนการที่มีระยะเวลาหน่วงนานจะใช้เวลาในการปรับนานที่สุด โปรดจำไว้ว่าในขณะที่จุดแสดงผลกะพริบ ตัวควบคุมจะปรับอัตโนมัติ
บันทึก: หากมีข้อผิดพลาด AT( ![]() ) เกิดขึ้น กระบวนการปรับแต่งอัตโนมัติจะถูกยกเลิกเนื่องจากระบบปฏิบัติการในการควบคุมเปิด-ปิด (PB=0)
) เกิดขึ้น กระบวนการปรับแต่งอัตโนมัติจะถูกยกเลิกเนื่องจากระบบปฏิบัติการในการควบคุมเปิด-ปิด (PB=0)
กระบวนการจะถูกยกเลิกเช่นกันหากจุดตั้งค่าถูกตั้งค่าให้ใกล้เคียงกับอุณหภูมิของกระบวนการหรือหากระบบมีกำลังการผลิตไม่เพียงพอที่จะถึงจุดตั้งค่า (เช่น พลังงานความร้อนไม่เพียงพอ) เมื่อการปรับอัตโนมัติเสร็จสิ้น การตั้งค่า PID ใหม่จะถูกป้อนลงในหน่วยความจำถาวรของตัวควบคุมโดยอัตโนมัติ
8.5 การปรับ PID ด้วยตนเอง
ในขณะที่ฟังก์ชันปรับอัตโนมัติจะเลือกการตั้งค่าการควบคุมที่ควรจะเป็นที่น่าพอใจสำหรับกระบวนการส่วนใหญ่ คุณอาจพบว่าจำเป็นต้องปรับเปลี่ยนการตั้งค่าเหล่านี้เป็นครั้งคราว ซึ่งอาจเกิดขึ้นได้หากมีการเปลี่ยนแปลงบางอย่างในกระบวนการหรือหากคุณต้องการ "ปรับแต่ง" การตั้งค่าการควบคุม
สิ่งสำคัญคือ ก่อนที่จะทำการเปลี่ยนแปลงการตั้งค่าการควบคุม คุณควรบันทึกการตั้งค่าปัจจุบันไว้เพื่อใช้เป็นข้อมูลอ้างอิงในอนาคต เปลี่ยนแปลงการตั้งค่าเพียงเล็กน้อยครั้งละหนึ่งค่า และสังเกตผลลัพธ์ของกระบวนการ เนื่องจากการตั้งค่าแต่ละค่าจะโต้ตอบกันเอง จึงอาจสับสนกับผลลัพธ์ได้ง่าย หากคุณไม่คุ้นเคยกับขั้นตอนการควบคุมกระบวนการ
คู่มือการปรับแต่ง
วงดนตรีตามสัดส่วน
| อาการ | สารละลาย |
| ตอบสนองช้า | ลดค่า PB |
| การโอเวอร์ชู้ตหรือการแกว่งสูง | เพิ่มมูลค่า PB |
เวลาอินทิกรัล (รีเซ็ต)
| อาการ | สารละลาย |
| ตอบสนองช้า | ลดเวลาอินทิกรัล |
| ความไม่แน่นอนหรือการสั่น | เพิ่มเวลาอินทิกรัล |
เวลาอนุพันธ์ (อัตรา)
| อาการ | สารละลาย |
| การตอบสนองช้าหรือการสั่น | ลดเวลาการได้มา |
| โอเวอร์ชูตสูง | เพิ่มเวลา Deriv. |
8.6 ขั้นตอนการปรับแต่งด้วยตนเอง
ขั้นตอนที่ 1: ปรับค่าอินทิกรัลและอนุพันธ์ให้เป็น 0 ซึ่งจะยับยั้งอัตราและการดำเนินการรีเซ็ต
ขั้นตอนที่ 2: ตั้งค่าค่าแบนด์ตามสัดส่วนและติดตามผลการควบคุม
ขั้นตอนที่ 3: หากการตั้งค่าเดิมทำให้เกิดการสั่นของกระบวนการขนาดใหญ่ ให้ค่อยๆ เพิ่มแถบสัดส่วนจนกระทั่งเกิดการหมุนเวียนคงที่ บันทึกค่าแถบสัดส่วนนี้ (Pc)
ขั้นตอนที่ 4: วัดระยะเวลาของการปั่นจักรยานแบบคงที่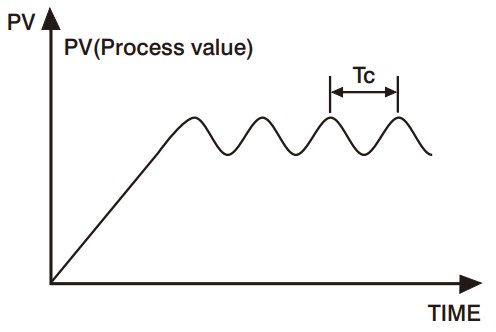 บันทึกค่านี้ (Tc) เป็นวินาที
บันทึกค่านี้ (Tc) เป็นวินาที
ขั้นตอนที่ 5: การตั้งค่าการควบคุมจะถูกกำหนดดังนี้:
แถบสัดส่วน(PB)=1.7 พีซี
เวลาอินทิกรัล (TI) = 0.5 Tc
เวลาอนุพันธ์ (TD) = 0.125 Tc
8.7 รAMP & อยู่อาศัย
สามารถกำหนดค่าตัวควบคุม BTC-9090 ให้ทำหน้าที่เป็นตัวควบคุมจุดตั้งค่าคงที่หรือเป็นตัวควบคุม r ตัวเดียวamp ตัวควบคุมเมื่อเปิดเครื่อง ฟังก์ชันนี้ช่วยให้ผู้ใช้สามารถตั้งค่า r ที่กำหนดไว้ล่วงหน้าamp อัตราการให้กระบวนการค่อยๆ ไปถึงอุณหภูมิที่ตั้งไว้ จึงทำให้เกิดฟังก์ชัน 'การเริ่มแบบนุ่มนวล'
ตัวจับเวลาการทำงานถูกรวมไว้ใน BTC-9090 และสามารถกำหนดค่ารีเลย์สัญญาณเตือนเพื่อให้มีฟังก์ชันการทำงานการทำงานเพื่อใช้ร่วมกับ ramp การทำงาน.
อาร์amp อัตราจะถูกกำหนดโดย ' ![]() ' พารามิเตอร์ที่สามารถปรับในช่วง 0 ถึง 200.0 BC/นาทีamp ฟังก์ชันอัตราจะปิดใช้งานเมื่อ '
' พารามิเตอร์ที่สามารถปรับในช่วง 0 ถึง 200.0 BC/นาทีamp ฟังก์ชันอัตราจะปิดใช้งานเมื่อ ' ![]() ' พารามิเตอร์ถูกตั้งค่าเป็น ' 0 '
' พารามิเตอร์ถูกตั้งค่าเป็น ' 0 '
ฟังก์ชันการแช่จะเปิดใช้งานโดยการกำหนดค่าเอาต์พุตสัญญาณเตือนให้ทำหน้าที่เป็นตัวจับเวลาการหยุดทำงาน พารามิเตอร์ ![]() ต้องตั้งค่าเป็นค่า 12 การติดต่อแจ้งเตือนจะทำงานเป็นการติดต่อตั้งเวลา โดยการติดต่อจะปิดเมื่อเปิดเครื่องและจะเปิดขึ้นหลังจากเวลาที่ผ่านไปตามที่ตั้งไว้ในพารามิเตอร์
ต้องตั้งค่าเป็นค่า 12 การติดต่อแจ้งเตือนจะทำงานเป็นการติดต่อตั้งเวลา โดยการติดต่อจะปิดเมื่อเปิดเครื่องและจะเปิดขึ้นหลังจากเวลาที่ผ่านไปตามที่ตั้งไว้ในพารามิเตอร์![]() .
.
หากแหล่งจ่ายไฟหรือเอาต์พุตของตัวควบคุมเชื่อมต่อผ่านสายสัญญาณเตือนภัย ตัวควบคุมจะทำงานเป็นตัวควบคุมการแช่ที่รับประกัน
ในอดีตample ด้านล่าง Ramp อัตราจะถูกตั้งไว้ที่ 5 BC/นาที ![]() = 12 และ
= 12 และ ![]() =15 (นาที) กำลังไฟฟ้าจะถูกจ่ายที่เวลาศูนย์ และกระบวนการจะเพิ่มขึ้นที่ 5 BC/นาทีจนถึงจุดตั้งค่าที่ 125 BC เมื่อถึงจุดตั้งค่า ตัวจับเวลาพักจะเปิดใช้งาน และหลังจากเวลาแช่ 15 นาที การติดต่อแจ้งเตือนจะเปิดขึ้นเพื่อปิดเอาต์พุต อุณหภูมิของกระบวนการจะลดลงในที่สุดในอัตราที่ไม่แน่นอน
=15 (นาที) กำลังไฟฟ้าจะถูกจ่ายที่เวลาศูนย์ และกระบวนการจะเพิ่มขึ้นที่ 5 BC/นาทีจนถึงจุดตั้งค่าที่ 125 BC เมื่อถึงจุดตั้งค่า ตัวจับเวลาพักจะเปิดใช้งาน และหลังจากเวลาแช่ 15 นาที การติดต่อแจ้งเตือนจะเปิดขึ้นเพื่อปิดเอาต์พุต อุณหภูมิของกระบวนการจะลดลงในที่สุดในอัตราที่ไม่แน่นอน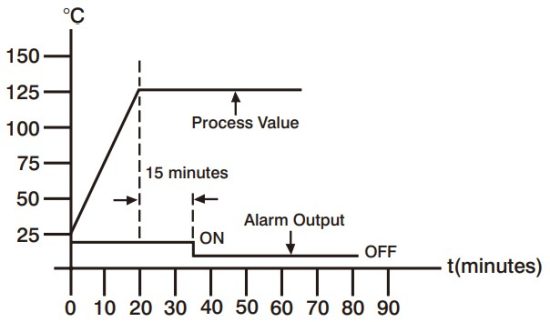 ฟังก์ชั่นแช่อาจใช้เพื่อควบคุมอุปกรณ์ภายนอก เช่น ไซเรน เพื่อแจ้งเตือนเมื่อถึงเวลาแช่
ฟังก์ชั่นแช่อาจใช้เพื่อควบคุมอุปกรณ์ภายนอก เช่น ไซเรน เพื่อแจ้งเตือนเมื่อถึงเวลาแช่
ต้องตั้งค่าเป็นค่า 13 การติดต่อแจ้งเตือนจะทำงานเป็นการติดต่อตั้งเวลา โดยการติดต่อจะเปิดอยู่เมื่อเริ่มใช้งานครั้งแรก ตั้งเวลาจะเริ่มนับถอยหลังเมื่อถึงอุณหภูมิที่ตั้งไว้ หลังจากผ่านการตั้งค่าที่ XNUMX การติดต่อแจ้งเตือนจะปิดลง
ข้อความแสดงข้อผิดพลาด
| อาการ | สาเหตุ | โซลูชัน (s) |
| เซ็นเซอร์เสียผิดปกติ | เปลี่ยน RTD หรือเซนเซอร์ ใช้การทำงานโหมดแมนนวล |
|
| การแสดงกระบวนการเกินจุดตั้งค่าช่วงต่ำ | ปรับค่าใหม่ | |
| การแสดงกระบวนการเกินจุดตั้งค่าช่วงสูง | ปรับค่าใหม่ | |
| ความเสียหายของโมดูลไฮบริดอนาล็อก | เปลี่ยนโมดูล ตรวจสอบแหล่งความเสียหายภายนอก เช่น แรงดันไฟฟ้าชั่วขณะtagอีแหลม | |
| การทำงานของขั้นตอนการปรับจูนอัตโนมัติไม่ถูกต้อง ตั้งค่าแบนด์ Prop เป็น 0 | ทำซ้ำขั้นตอน เพิ่ม Prop. Band เป็นตัวเลขที่มากกว่า 0 | |
| โหมดแมนนวลไม่อนุญาตให้ใช้กับระบบควบคุมเปิด-ปิด | เพิ่มแบนด์ตามสัดส่วน | |
| ตรวจสอบข้อผิดพลาดผลรวม ค่าในหน่วยความจำอาจเปลี่ยนแปลงโดยไม่ได้ตั้งใจ | ตรวจสอบและกำหนดค่าพารามิเตอร์การควบคุมใหม่ |
คำแนะนำเพิ่มเติมสำหรับเวอร์ชันใหม่
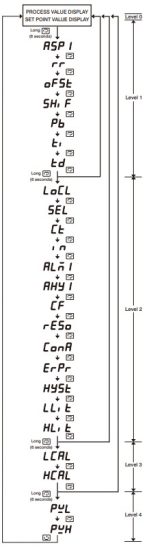
หน่วยที่มีเฟิร์มแวร์เวอร์ชัน V3.7 มีพารามิเตอร์เพิ่มเติมสองตัวคือ “PVL” และ “PVH” ที่อยู่ในระดับ 4 ตามแผนผังกระแสพารามิเตอร์ทางด้านซ้ายมือ
เมื่อคุณจำเป็นต้องเปลี่ยนค่า LLit ให้เป็นค่าที่สูงขึ้นหรือเปลี่ยนค่า HLit ให้เป็นค่าที่ต่ำลง จะต้องปฏิบัติตามขั้นตอนต่อไปนี้เพื่อให้ค่า PVL เทียบเท่ากับค่า LCAL หนึ่งในสิบ และค่า PVH เทียบเท่ากับค่า HCAL หนึ่งในสิบ มิฉะนั้น ค่ากระบวนการที่วัดได้จะไม่เป็นไปตามข้อกำหนด
- ใช้ปุ่มเลื่อนจนกว่า “LLit” จะปรากฏบนหน้าจอ PV ใช้ปุ่มขึ้นและลงเพื่อตั้งค่า LLit ให้สูงกว่าค่าเดิม
- กดและปล่อยปุ่มเลื่อน จากนั้นคำว่า “HLit” จะปรากฏบนจอแสดงผล PV ใช้ปุ่มขึ้นและลงเพื่อตั้งค่า HLit ให้ต่ำกว่าค่าเดิม
- ปิดและเปิดเครื่อง
- ใช้ปุ่มเลื่อนจนกว่า “LCAL” จะปรากฏบนจอแสดงผล PV จดบันทึกค่า LCAL
- กดและปล่อยปุ่มเลื่อน จากนั้นคำว่า “HCAL” จะปรากฏบนจอแสดงผล PV จดบันทึกค่า HCAL
- กดปุ่มเลื่อนค้างไว้ 6 วินาที จากนั้นปล่อย ปุ่ม “PVL” จะปรากฏบนหน้าจอ PV ใช้ปุ่มขึ้นและลงเพื่อตั้งค่า PVL เป็น XNUMX ใน XNUMX ของค่า LCAL
- กดและปล่อยปุ่มเลื่อน คำว่า “PVH” จะปรากฏบนจอแสดงผล PV ใช้ปุ่มขึ้นและลงเพื่อตั้งค่า PVH เป็นหนึ่งในสิบของค่า HCAL
-กรุณาติดตั้งเบรกเกอร์ 20A ที่ปลายแหล่งจ่ายไฟ
-เพื่อขจัดฝุ่นโปรดใช้ผ้าแห้ง
-การติดตั้งที่ความปลอดภัยของระบบใดๆ ที่รวมอุปกรณ์ไว้เป็นความรับผิดชอบของผู้ประกอบระบบ
-หากใช้อุปกรณ์ในลักษณะที่ไม่ได้ระบุไว้โดยผู้ผลิต การป้องกันที่อุปกรณ์ให้มาอาจได้รับผลกระทบ
ห้ามปิดช่องระบายอากาศเพื่อรักษาการไหลเวียนของอากาศ
ระวังอย่าขันสกรูขั้วต่อแน่นเกินไป แรงบิดไม่ควรเกิน 1 14 นิวตันเมตร (10 ปอนด์-นิ้ว หรือ 11.52 กก.-ซม.) อุณหภูมิต่ำสุด 60°C ใช้ตัวนำทองแดงเท่านั้น
ยกเว้นสายไฟเทอร์โมคัปเปิล สายไฟทั้งหมดควรใช้ตัวนำทองแดงแบบเกลียวที่มีขนาดสูงสุด 18 AWG
การรับประกัน
บริษัท เบรนไชลด์ อิเล็คทรอนิคส์ จำกัด ยินดีเสนอแนะการใช้งานผลิตภัณฑ์ต่างๆ ของเรา
อย่างไรก็ตาม Brainchild ไม่รับประกันหรือรับรองใดๆ เกี่ยวกับความเหมาะสมในการใช้งานหรือการใช้ผลิตภัณฑ์ของผู้ซื้อ การเลือก การใช้หรือการใช้ผลิตภัณฑ์ของ Brainchild เป็นความรับผิดชอบของผู้ซื้อ จะไม่อนุญาตให้เรียกร้องความเสียหายหรือการสูญเสียใดๆ ไม่ว่าจะเป็นโดยตรง โดยอ้อม บังเอิญ พิเศษ หรือเป็นผลสืบเนื่อง ข้อมูลจำเพาะอาจเปลี่ยนแปลงได้โดยไม่ต้องแจ้งให้ทราบล่วงหน้า นอกจากนี้ Brainchild ขอสงวนสิทธิ์ในการเปลี่ยนแปลงวัสดุหรือการประมวลผลโดยไม่แจ้งให้ผู้ซื้อทราบ ซึ่งจะไม่ส่งผลต่อการปฏิบัติตามข้อมูลจำเพาะที่เกี่ยวข้อง ผลิตภัณฑ์ของ Brainchild ได้รับการรับประกันว่าปราศจากข้อบกพร่องในวัสดุและฝีมือการผลิตเป็นเวลา 18 เดือนหลังจากส่งมอบให้กับผู้ซื้อรายแรกเพื่อใช้งาน ระยะเวลาขยายออกไปนั้นสามารถทำได้โดยมีค่าใช้จ่ายเพิ่มเติมเมื่อได้รับการร้องขอ ความรับผิดชอบแต่เพียงผู้เดียวของ Brainchild ภายใต้การรับประกันนี้ ซึ่งขึ้นอยู่กับตัวเลือกของ Brainchild จำกัดเฉพาะการเปลี่ยนหรือซ่อมแซมโดยไม่มีค่าใช้จ่าย หรือคืนเงินราคาซื้อภายในระยะเวลาการรับประกันที่ระบุ การรับประกันนี้ไม่ครอบคลุมถึงความเสียหายที่เกิดจากการขนส่ง การดัดแปลง การใช้ในทางที่ผิด หรือการใช้ในทางที่ผิด
การคืนสินค้า
จะไม่สามารถรับคืนสินค้าได้หากไม่มีแบบฟอร์มอนุญาตส่งคืนวัสดุ (RMA) ที่กรอกข้อมูลครบถ้วน
บันทึก:
ข้อมูลในคู่มือผู้ใช้นี้อาจมีการเปลี่ยนแปลงโดยไม่ต้องแจ้งให้ทราบล่วงหน้า
ลิขสิทธิ์ © 2023 บริษัท Brainchild Electronic Co., Ltd. สงวนลิขสิทธิ์ ห้ามทำซ้ำ ส่งต่อ ถอดเสียง หรือจัดเก็บส่วนใดส่วนหนึ่งของสิ่งพิมพ์นี้ในระบบค้นคืน หรือแปลเป็นภาษาอื่น ๆ ในรูปแบบใด ๆ ด้วยวิธีการใด ๆ โดยไม่ได้รับอนุญาตเป็นลายลักษณ์อักษรจากบริษัท Brainchild Electronic Co., Ltd.
![]() สำหรับความต้องการในการซ่อมแซมหรือบำรุงรักษาใด ๆ โปรดติดต่อเรา
สำหรับความต้องการในการซ่อมแซมหรือบำรุงรักษาใด ๆ โปรดติดต่อเรา
บริษัท อิเล็คทรอนิคส์ จำกัด
เลขที่ 209 ถ.จุงยาง เขตหนานกัง
ไทเป 11573 ไต้หวัน
โทร: 886-2-27861299
โทรสาร : 886-2-27861395
web เว็บไซต์: http://www.brainchildtw.com![]()
เอกสาร / แหล่งข้อมูล
 |
ตัวควบคุมไมโครโปรเซสเซอร์ฟัซซี่ลอจิก BrainChild BTC-9090 [พีดีเอฟ] คู่มือการใช้งาน BTC-9090, BTC-9090 G UL, BTC-9090 ตัวควบคุมแบบฟัซซี่ลอจิกที่ใช้ไมโครโปรเซสเซอร์, ตัวควบคุมแบบฟัซซี่ลอจิกที่ใช้ไมโครโปรเซสเซอร์, ตัวควบคุมแบบไมโครโปรเซสเซอร์, ตัวควบคุมแบบโปรเซสเซอร์, ตัวควบคุมแบบมีพื้นฐาน |