![]() Pengontrol Mikroprosesor Berbasis Logika Fuzzy BTC-9090
Pengontrol Mikroprosesor Berbasis Logika Fuzzy BTC-9090
Manual Instruksi
PERKENALAN
Manual ini berisi informasi untuk instalasi dan pengoperasian pengendali mikroprosesor Brainchild model BTC-9090 Fuzzy Logic.
Logika Fuzzy merupakan fitur penting dari kontroler serbaguna ini. Meskipun kontrol PID telah diterima secara luas oleh industri, namun kontrol PID sulit untuk bekerja dengan beberapa sistem canggih secara efisien, misalnyaampsistem orde kedua, jeda waktu yang lama, berbagai titik setel, berbagai beban, dll. Karena kekurangannyatagDengan prinsip-prinsip pengendalian dan nilai-nilai tetap dari kontrol PID, tidak efisien untuk mengendalikan sistem dengan banyak variasi, dan hasilnya jelas membuat frustrasi bagi beberapa sistem. Kontrol Logika Fuzzy dapat mengatasi kelemahan tersebuttagSebagai contoh, kontrol PID mengendalikan sistem secara efisien berdasarkan pengalaman yang pernah dialami sebelumnya. Fungsi Logika Fuzzy adalah untuk menyesuaikan nilai PID secara tidak langsung agar nilai keluaran manipulasi MV dapat disesuaikan secara fleksibel dan cepat beradaptasi dengan berbagai proses. Dengan cara ini, memungkinkan suatu proses mencapai titik setel yang telah ditentukan sebelumnya dalam waktu yang sesingkat-singkatnya dengan overshooting minimum selama penyetelan atau gangguan eksternal. Berbeda dengan kontrol PID dengan informasi digital, Logika Fuzzy merupakan kontrol dengan informasi bahasa.
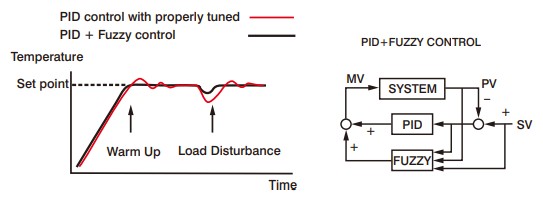
Selain itu, instrumen ini memiliki fungsi tunggaltagdiaamp dan mode dwell, auto-tunung, dan eksekusi mode manual. Kemudahan penggunaan juga merupakan fitur penting di dalamnya.
SISTEM PEMBIMBINGAN NOMOR
Nomor Model. ![]() (1) Daya Masukan
(1) Daya Masukan
| 4 | Tegangan 90-264VAC |
| 5 | Tegangan AC 20-32 V/DC |
| 9 | Lainnya |
(2) Sinyal Masukan
1 0 – 5V 3 PT100 DIN 5 TC 7 0 – 20mA 8 0 – 10V
(3) Kode Rentang
| 1 | Dapat dikonfigurasi |
| 9 | Lainnya |
(4) Mode Kontrol
| 3 | Kontrol PID / ON-OFF |
(5) Output 1 Pilihan
| 0 | Tidak ada |
| 1 | Relai dengan rating 2A/240VAC resistif |
| 2 | Penggerak SSR diberi nilai 20mA/24V |
| 3 | 4-20mA linier, beban maks. 500 ohm (Modul OM93-1) |
| 4 | 0-20mA linier, beban maks. 500 ohm (Modul OM93-2) |
| 5 | 0-10V linier, impedansi minimum 500K ohm (Modul OM93-3) |
| 9 | Lainnya |
(6) Output 2 Pilihan
| 0 | Tidak ada |
(7) Opsi Alarm
| 0 | Tidak ada |
| 1 | Relai dengan rating 2A/240VAC resistif |
| 9 | Lainnya |
(8) Komunikasi
| 0 | Tidak ada |
DESKRIPSI PANEL DEPAN
 JARAK INPUT DAN AKURASI
JARAK INPUT DAN AKURASI
| IN | Sensor | Jenis Input | Rentang (SM) | Ketepatan |
| 0 | J | Besi-Konstantan | -50 hingga 999 SM | A2 SM |
| 1 | K | Krom-Alumel | -50 hingga 1370 SM | A2 SM |
| 2 | T | Tembaga-Konstantan | -270 hingga 400 SM | A2 SM |
| 3 | E | Krom-Konstantan | -50 hingga 750 SM | A2 SM |
| 4 | B | Pt30%RH/Pt6%RH | 300 hingga 1800 SM | A3 SM |
| 5 | R | Pt13%RH/Pt | 0 hingga 1750 SM | A2 SM |
| 6 | S | Pt10%RH/Pt | 0 hingga 1750 SM | A2 SM |
| 7 | N | Nikrosil-Nisil | -50 hingga 1300 SM | A2 SM |
| 8 | RTD | PT100 ohm (DIN) | -200 hingga 400 SM | A0.4 SM |
| 9 | RTD | PT100 ohm (JIS) | -200 hingga 400 SM | A0.4 SM |
| 10 | Linier | -10mV hingga 60mV | -1999 hingga 9999 | A0.05% |
SPESIFIKASI
MASUKAN
| Termokopel (T/C): | tipe J, K, T, E, B, R, S, N. |
| RTD: | PT100 ohm RTD (DIN 43760/BS1904 atau JIS) |
| Linier: | -10 hingga 60 mV, redaman input yang dapat dikonfigurasi |
| Jangkauan: | Dapat dikonfigurasi pengguna, lihat Tabel di atas |
| Ketepatan: | Lihat Tabel di atas |
| Kompensasi Persimpangan Dingin: | 0.1 SM/ SM ambien khas |
| Proteksi Kerusakan Sensor: | Mode perlindungan dapat dikonfigurasi |
| Resistensi Eksternal: | 100 ohm maks. |
| Penolakan Mode Normal: | 60dB |
| Penolakan Mode Umum: | 120dB |
| SampNilai: | 3 kali / detik |
KONTROL
| Pita Proporsi: | 0 – 200 SM (0-360 SM) |
| Setel Ulang (Integral): | 0 – 3600 detik |
| Nilai ( Derivatif ): | 0 – 1000 detik |
| Ramp Kecepatan: | 0 – 200.0 SM/menit (0 – 360.0 BF/menit) |
| Tinggal: | 0 – 3600 menit |
| HIDUP-MATI: | Dengan histeresis yang dapat disesuaikan (0-20% dari SPAN) |
| Waktu Siklus: | 0-120 detik |
| Tindakan Kontrol: | Langsung (untuk pendinginan) dan sebaliknya (untuk pemanasan) |
| KEKUATAN | Tegangan 90-264 VAC, 50/60 Hz 10 VA 20-32VDC/VAC, 50/60Hz 10VA |
LINGKUNGAN & FISIK
| Keamanan: | UL 61010-1, Edisi ke-3. CAN/CSA-C22.2 No. 61010-1(2012-05), Edisi ke-3. |
| Emisi EMC: | EN50081-1 |
| Imunitas EMC: | EN50082-2 |
| Suhu Operasional: | -10 hingga 50 SM |
| Kelembaban: | 0 hingga 90% RH (non-codensing) |
| Isolasi: | Minimum 20M ohm (500 VDC) |
| Perincian: | AC 2000V, 50/60 Hz, 1 menit |
| Getaran: | Frekuensi 10 – 55Hz, ampgaris lintang 1 mm |
| Terkejut: | 200 m/detik (20g) |
| Berat Bersih: | 170 gram |
| Bahan Perumahan: | Plastik Polikarbonat |
| Ketinggian: | Kurang dari 2000 m |
| Penggunaan Dalam Ruangan | |
| BerlebihantagKategori e | II |
| Tingkat Polusi: | 2 |
| Fluktuasi Tegangan Masukan Daya: | 10% dari volume nominaltage |
INSTALASI
6.1 DIMENSI & POTONGAN PANEL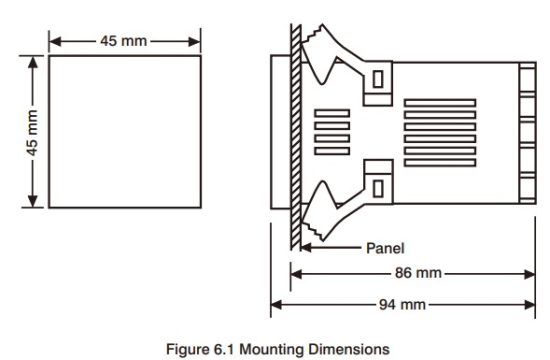 6.2 DIAGRAM PENGKABELAN
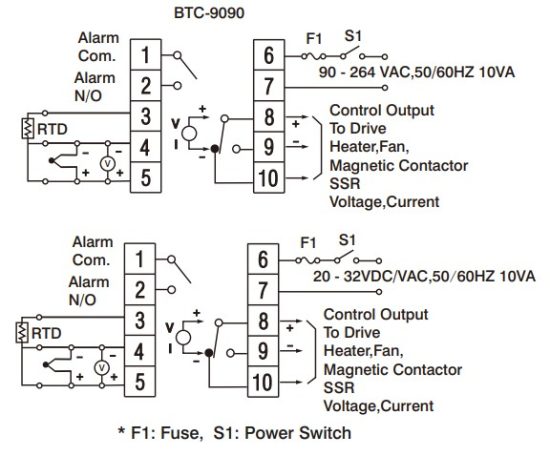
6.2 DIAGRAM PENGKABELAN
KALIBRASI
Catatan: Jangan lanjutkan bagian ini kecuali jika benar-benar diperlukan kalibrasi ulang pengontrol. Semua tanggal kalibrasi sebelumnya akan hilang. Jangan mencoba kalibrasi ulang kecuali Anda memiliki peralatan kalibrasi yang sesuai. Jika data kalibrasi hilang, Anda harus mengembalikan pengontrol ke pemasok yang mungkin mengenakan biaya kalibrasi ulang.
Sebelum kalibrasi, pastikan semua pengaturan parameter sudah benar (jenis input, C / F, resolusi, rentang rendah, rentang tinggi).
- Lepaskan kabel masukan sensor dan hubungkan simulator masukan standar dengan tipe yang benar ke masukan pengontrol. Verifikasi polaritas yang benar. Atur sinyal simulasi agar bertepatan dengan sinyal proses rendah (misalnya nol derajat).
- Gunakan Tombol Gulir sampai ”
 ” muncul di Tampilan PV. (Lihat 8.2)
” muncul di Tampilan PV. (Lihat 8.2) - Gunakan Tombol Atas dan Bawah hingga Tampilan PV menampilkan masukan simulasi.
- Tekan Tombol Return selama minimal 6 detik (maksimal 16 detik), lalu lepaskan. Ini memasukkan angka kalibrasi rendah ke dalam memori nonvolatil pengontrol.
- Tekan dan lepaskan Tombol Gulir.
 " muncul di PV Display. Ini menunjukkan titik kalibrasi tinggi.
" muncul di PV Display. Ini menunjukkan titik kalibrasi tinggi. - Tingkatkan sinyal masukan simulasi agar bertepatan dengan sinyal proses tinggi (misalnya 11 derajat).
- Gunakan Tombol Atas dan Bawah hingga Tampilan SV menampilkan simulasi masukan tinggi.
- Tekan Tombol Return selama minimal 6 detik (maksimal 16 detik), lalu lepaskan. Angka kalibrasi tinggi ini akan dimasukkan ke dalam memori nonvolatil pengontrol.
- Matikan daya unit, lepaskan semua kabel pengujian, dan ganti kabel sensor (perhatikan polaritasnya).
OPERASI
8.1 PENGOPERASIAN KEYPAD
* Dengan daya menyala, ia harus menunggu selama 12 detik untuk mengingat nilai parameter baru setelah diubah.
| TOMBOL SENTUH | FUNGSI | KETERANGAN |
| Tombol Gulir | Majukan tampilan indeks ke posisi yang diinginkan. Indeks maju terus-menerus dan berputar dengan menekan papan tombol ini. |
|
| Kunci atas | Meningkatkan parameter | |
| Tombol Bawah | Mengurangi parameter | |
| Kunci Pengembalian | Mengatur ulang pengontrol ke status normalnya. Juga menghentikan penyetelan otomatis, output persentage pemantauan dan operasi mode manual. | |
| Tekan |
Gulir Panjang | Memungkinkan lebih banyak parameter untuk diperiksa atau diubah. |
| Tekan |
Pengembalian Panjang | 1. Menjalankan fungsi penyetelan otomatis 2. Mengkalibrasi kontrol saat dalam level kalibrasi |
| Tekan |
Persen Keluarantage Memantau | Memungkinkan tampilan titik yang ditetapkan untuk menunjukkan nilai keluaran kontrol. |
| Tekan |
Eksekusi Mode Manual | Memungkinkan pengontrol untuk memasuki mode manual. |
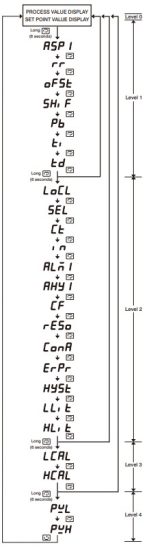
8.2 BAGAN ALIR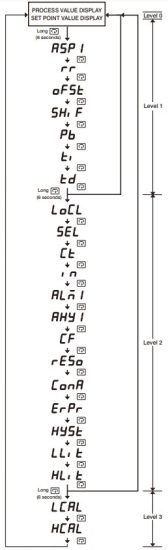 Tombol “kembali” dapat ditekan kapan saja.
Tombol “kembali” dapat ditekan kapan saja.
Ini akan mendorong tampilan untuk kembali ke nilai Proses/nilai titik Tetap.
Daya yang Diterapkan:
 Ditampilkan selama 4 detik. (Versi Perangkat Lunak 3.6 atau lebih tinggi)
Ditampilkan selama 4 detik. (Versi Perangkat Lunak 3.6 atau lebih tinggi) Uji LED. Semua segmen LED harus menyala selama 4 detik.
Uji LED. Semua segmen LED harus menyala selama 4 detik.- Nilai proses dan titik setel ditunjukkan.
8.3 DESKRIPSI PARAMETER
| KODE INDEKS | DESKRIPSI JARAK PENYESUAIAN | **PENGATURAN DEFAULT | ||
| SV | Setel titik Nilai Kontrol *Nilai Batas Bawah ke Batas Tinggi |
Belum diartikan | ||
| Nilai Titik Setel Alarm * Batas Rendah ke Batas Tinggi Value. if * 0 hingga 3600 menit (jika * Batas Rendah Mins atur titik ke tinggi Batas minus nilai titik setel (jika |
200 SM | |||
| Ramp Nilai untuk nilai proses guna membatasi perubahan proses yang tiba-tiba (Soft Start) * 0 hingga 200.0 SM (360.0 BF) / menit (jika * 0 hingga 3600 unit / menit (jika |
0 SM / menit. | |||
| Nilai Offset untuk Reset Manual (jika |
0.0% | |||
| Pergeseran offset untuk nilai proses * -111 SM hingga 111 SM |
0 SM | |||
| Pita Proporsional
* 0 hingga 200 SM (diatur ke 0 untuk kontrol hidup-mati) |
10 SM | |||
| Waktu Integral (Reset) * 0 hingga 3600 detik |
120 detik. | |||
| Derivatif (Tingkat) Waktu * 0 hingga 360.0 detik |
30 detik. | |||
| Mode lokal 0: Tidak ada parameter kontrol yang dapat diubah 1: Parameter kontrol dapat diubah |
1 | |||
| Pemilihan Parameter (memungkinkan pemilihan parameter tambahan dapat diakses pada keamanan level 0) |
0 | |||
| Waktu Siklus Proporsional * 0 hingga 120 detik |
Menyampaikan | 20 | ||
| Berdenyut Voltage | 1 | |||
| Voltase Linier/mA | 0 | |||
| Pemilihan Mode Masukan 0: Tipe J T/C 6: Tipe S T/C 1: Tipe K T/C 7: Tipe N T/C 2: Tipe T T/C 8: PT100 KERIUHAN 3: Tipe E T/C 9: PT100 JIS 4: Tipe B T/C 10: Vol Liniertage atau Arus 5: Tipe R T/C Catatan: T/C-Tutup celah solder G5, RTD-Buka G5 |
Syarat dan Ketentuan | 0 | ||
| RTD | 8 | |||
| Linier | 10 | |||
| Pemilihan Mode Alarm 0: Proses Alarm Tinggi 8: Alarm Pita Luar 1: Proses Alarm Rendah 9: Alarm masuk 2: Alarm Deviasi Tinggi 10: Menghambat Alarm Outband 3: Alarm Deviasi Rendah 11: Menghambat Alarm Inband 4: Menghambat Alarm Proses Tinggi 12: Relai Alarm MATI sebagai 5: Menghambat Alarm Proses Rendah Waktu Habis Tinggal 6: Penghambat Penyimpangan Alarm Tinggi 13: Relai Alarm AKTIF sebagai 7: Penghambat Penyimpangan Alarm Rendah Waktu Hening Habis |
0 | |||
| Histeresis Alarm 1 * 0 hingga 20% dari SPAN |
0.5% | |||
| Pemilihan BC / BF 0: BF, 1: SM |
1 | |||
| Pemilihan Resolusi 0: Tidak Ada Titik Desimal 2: 2 Digit Desimal 1: 1 Digit Desimal 3: 3 Digit Desimal (2 & 3 hanya dapat digunakan untuk vol lineartage atau arus |
0 |
|||
| Tindakan Kontrol 0: Aksi Langsung (Pendinginan) 1: Aksi Terbalik (Panas) |
1 | |||
| Perlindungan Kesalahan 0: Kontrol MATI, Alarm MATI 2: Kontrol HIDUP, Alarm MATI 1: Kontrol MATI, Alarm HIDUP 3: Kontrol HIDUP, Alarm HIDUP |
1 |
|||
| Histerisis untuk Kontrol ON/OFF *0 hingga 20% dari SPAN |
0.5% | |||
| Batas Rendah Jangkauan | -50 SM | |||
| Batas Jangkauan Tinggi | 1000 SM | |||
| Angka Kalibrasi Rendah | 0 SM | |||
| Angka Kalibrasi Tinggi | 800 SM | |||
CATATAN: * Menyesuaikan Rentang Parameter
** Pengaturan pabrik. Alarm proses berada pada titik suhu tetap. Alarm deviasi bergerak sesuai nilai titik yang ditetapkan.
8.4 PENYETELAN OTOMATIS
- Pastikan pengontrol dikonfigurasi dan dipasang dengan benar.
- Pastikan Pita Proporsional 'Pb' tidak ditetapkan pada '0'.
- Tekan tombol Return setidaknya selama 6 detik (maksimal 16 detik). Ini akan menginisialisasi fungsi Auto-tune. (Untuk membatalkan prosedur auto-tuning, tekan tombol Return dan lepaskan).
- Titik desimal di sudut kanan bawah layar PV berkedip untuk menunjukkan bahwa Auto-tune sedang berlangsung. Auto-tune selesai saat kedipan berhenti.
- Bergantung pada proses tertentu, penyetelan otomatis dapat memakan waktu hingga dua jam. Proses dengan jeda waktu yang lama akan memakan waktu paling lama untuk penyetelan. Ingat, saat titik tampilan berkedip, pengontrol sedang melakukan penyetelan otomatis.
CATATAN: Jika terjadi kesalahan AT( ![]() ) terjadi, proses penyetelan otomatis dibatalkan karena sistem beroperasi dalam kontrol ON-OFF (PB=0).
) terjadi, proses penyetelan otomatis dibatalkan karena sistem beroperasi dalam kontrol ON-OFF (PB=0).
Proses juga akan dibatalkan jika titik setel diatur mendekati suhu proses atau jika kapasitas dalam sistem tidak mencukupi untuk mencapai titik setel (misalnya daya pemanas yang tersedia tidak memadai). Setelah penyetelan otomatis selesai, pengaturan PID baru secara otomatis dimasukkan ke dalam memori nonvolatil pengontrol.
8.5 PENYESUAIAN PID MANUAL
Sementara fungsi penyetelan otomatis memilih pengaturan kontrol yang seharusnya memuaskan bagi sebagian besar proses, Anda mungkin perlu melakukan penyesuaian terhadap pengaturan yang berubah-ubah ini dari waktu ke waktu. Hal ini mungkin terjadi jika beberapa perubahan dilakukan pada proses atau jika Anda ingin 'menyempurnakan' pengaturan kontrol.
Penting untuk mencatat pengaturan saat ini untuk referensi di masa mendatang sebelum melakukan perubahan pada pengaturan kontrol. Lakukan perubahan kecil hanya pada satu pengaturan pada satu waktu dan amati hasilnya pada proses. Karena setiap pengaturan berinteraksi satu sama lain, mudah untuk bingung dengan hasilnya jika Anda tidak terbiasa dengan prosedur kontrol proses.
PANDUAN PENYETELAN
Pita Proporsional
| Gejala | Larutan |
| Respon Lambat | Turunkan Nilai PB |
| Overshoot atau Osilasi Tinggi | Meningkatkan Nilai PB |
Waktu Integral (Reset)
| Gejala | Larutan |
| Respon Lambat | Kurangi Waktu Integral |
| Ketidakstabilan atau Osilasi | Meningkatkan Waktu Integral |
Waktu Derivatif (Tingkat)
| Gejala | Larutan |
| Respons Lambat atau Osilasi | Penurunan Turunan Waktu |
| Overshoot Tinggi | Meningkatkan Waktu Turunan |
8.6 PROSEDUR PENYETELAN MANUAL
Langkah 1: Sesuaikan nilai integral dan turunan ke 0. Ini menghambat laju dan tindakan pengaturan ulang
Langkah 2: Tetapkan nilai pita proporsional yang sembarangan dan pantau hasil kontrolnya
Langkah 3: Jika pengaturan awal menghasilkan osilasi proses yang besar, maka tingkatkan pita proporsional secara bertahap hingga terjadi siklus yang stabil. Catat nilai pita proporsional ini (Pc).
Langkah 4: Ukur periode siklus stabil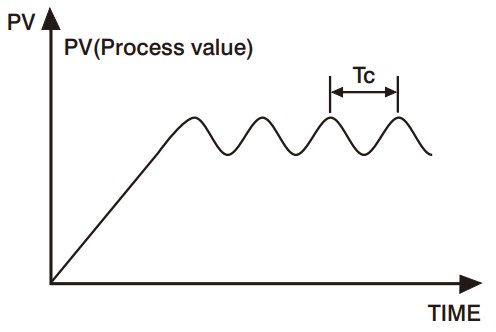 Catat nilai ini (Tc) dalam hitungan detik
Catat nilai ini (Tc) dalam hitungan detik
Langkah 5: Pengaturan Kontrol ditentukan sebagai berikut:
Proporsi Band (PB) = 1.7 Pc
Waktu Integral (TI) = 0.5 Tc
Waktu Turunan (TD) = 0.125 Tc
8.7 RAMP & TINGGAL
Kontroler BTC-9090 dapat dikonfigurasi untuk bertindak sebagai kontroler titik setel tetap atau sebagai pengontrol titik setel tunggal.amp pengontrol saat dinyalakan. Fungsi ini memungkinkan pengguna untuk mengatur r yang telah ditentukan sebelumnyaamp kecepatan untuk memungkinkan proses secara bertahap mencapai titik suhu yang ditetapkan, sehingga menghasilkan fungsi 'Soft Start'.
Pengatur waktu tunda disertakan dalam BTC-9090 dan relai alarm dapat dikonfigurasi untuk menyediakan fungsi tunda yang dapat digunakan bersama dengan ramp fungsi.
R ituamp tarif ditentukan oleh ' ![]() ' parameter yang dapat disesuaikan dalam kisaran 0 hingga 200.0 SM/menit.amp fungsi tingkat dinonaktifkan ketika '
' parameter yang dapat disesuaikan dalam kisaran 0 hingga 200.0 SM/menit.amp fungsi tingkat dinonaktifkan ketika ' ![]() ' parameter diatur ke ' 0 '.
' parameter diatur ke ' 0 '.
Fungsi perendaman diaktifkan dengan mengonfigurasi keluaran alarm untuk bertindak sebagai pengatur waktu tunda. Parameter ![]() perlu diatur ke nilai 12. Kontak alarm sekarang akan beroperasi sebagai kontak pengatur waktu, dengan kontak ditutup saat dinyalakan dan dibuka setelah waktu yang ditetapkan pada parameter
perlu diatur ke nilai 12. Kontak alarm sekarang akan beroperasi sebagai kontak pengatur waktu, dengan kontak ditutup saat dinyalakan dan dibuka setelah waktu yang ditetapkan pada parameter![]() .
.
Jika catu daya atau keluaran pengontrol disambungkan melalui kontak alarm, pengontrol akan beroperasi sebagai pengontrol perendaman terjamin.
Di mantanample di bawah Ramp Kecepatan ditetapkan pada 5 BC/menit, ![]() = 12 dan
= 12 dan ![]() =15 (menit). Daya diterapkan pada waktu nol dan proses meningkat pada 5 BC/menit hingga mencapai titik setel 125 BC. Setelah mencapai titik setel, pengatur waktu tunda diaktifkan dan setelah waktu perendaman 15 menit, kontak alarm akan terbuka, mematikan output. Suhu proses pada akhirnya akan turun pada tingkat yang tidak ditentukan.
=15 (menit). Daya diterapkan pada waktu nol dan proses meningkat pada 5 BC/menit hingga mencapai titik setel 125 BC. Setelah mencapai titik setel, pengatur waktu tunda diaktifkan dan setelah waktu perendaman 15 menit, kontak alarm akan terbuka, mematikan output. Suhu proses pada akhirnya akan turun pada tingkat yang tidak ditentukan.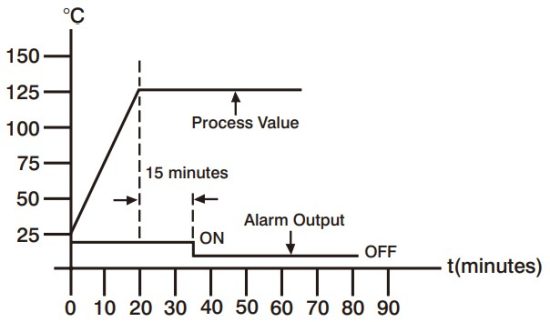 Fungsi diam dapat digunakan untuk mengoperasikan perangkat eksternal seperti sirene untuk memberi peringatan ketika waktu perendaman telah tercapai.
Fungsi diam dapat digunakan untuk mengoperasikan perangkat eksternal seperti sirene untuk memberi peringatan ketika waktu perendaman telah tercapai.
perlu diatur ke nilai 13. Kontak alarm sekarang akan beroperasi sebagai kontak pengatur waktu, dengan kontak terbuka pada saat awal dinyalakan. Pengatur waktu mulai menghitung mundur setelah suhu titik yang ditetapkan tercapai. Setelah pengaturan pada telah berlalu, kontak alarm menutup.
PESAN KESALAHAN
| Gejala | Penyebab (s) | Solusi) |
| Kesalahan kerusakan sensor | Ganti RTD atau sensor Gunakan operasi mode manual |
|
| Tampilan proses di luar titik setel rentang rendah | Sesuaikan kembali nilai | |
| Tampilan proses melampaui titik setel rentang tinggi | Sesuaikan kembali nilai | |
| Kerusakan modul hibrida analog | Ganti modul. Periksa sumber kerusakan eksternal seperti vol transientage paku | |
| Pengoperasian prosedur auto tune yang salah Prop. Band diatur ke 0 | Ulangi prosedur. Tingkatkan Prop. Band ke angka yang lebih besar dari 0 | |
| Mode manual tidak diperbolehkan untuk sistem kontrol ON-OFF | Meningkatkan pita proporsional | |
| Periksa kesalahan jumlah, nilai dalam memori mungkin berubah secara tidak sengaja | Periksa dan konfigurasikan ulang parameter kontrol |
Petunjuk Tambahan untuk Versi Baru
Unit dengan versi firmware V3.7 memiliki dua parameter tambahan – “PVL” dan “PVH” yang terletak di level 4 sebagai diagram alur parameter di sisi kiri.
Bila Anda perlu mengubah nilai LLit ke nilai yang lebih tinggi atau mengubah nilai HLit ke nilai yang lebih rendah, prosedur berikut harus diikuti untuk menjadikan nilai PVL setara dengan sepersepuluh nilai LCAL dan nilai PVH setara dengan sepersepuluh nilai HCAL. Jika tidak, nilai proses yang diukur akan berada di luar spesifikasi.
- Gunakan Tombol Gulir hingga “LLit” muncul pada Tampilan PV. Gunakan Tombol Atas dan Bawah untuk menyetel nilai LLit ke nilai yang lebih tinggi daripada nilai awal.
- Tekan dan lepaskan Tombol Gulir, lalu “HLit” akan muncul di Layar PV. Gunakan Tombol Atas dan Bawah untuk menyetel nilai HLit ke nilai yang lebih rendah dari nilai awal.
- Matikan dan nyalakan daya.
- Gunakan Tombol Gulir hingga “LCAL” muncul pada Tampilan PV. Catat nilai LCAL.
- Tekan dan lepaskan Tombol Gulir, lalu “HCAL” akan muncul di Tampilan PV. Catat nilai HCAL.
- Tekan Tombol Gulir setidaknya selama 6 detik lalu lepaskan, “PVL” akan muncul di Layar PV. Gunakan Tombol ATAS dan Bawah untuk menyetel nilai PVL ke sepersepuluh dari nilai LCAL.
- Tekan dan lepaskan Tombol Gulir, “PVH” akan muncul pada Tampilan PV. Gunakan Tombol ATAS dan Bawah untuk mengatur nilai PVH menjadi sepersepuluh dari nilai HCAL.
-Silakan pasang pemutus sirkuit 20A di ujung catu daya
-Untuk menghilangkan debu silahkan gunakan kain kering
-Instalasi bahwa keselamatan sistem apa pun yang menggabungkan peralatan adalah tanggung jawab perakit sistem tersebut
-Jika peralatan digunakan dengan cara yang tidak ditentukan oleh produsen, perlindungan yang diberikan oleh peralatan tersebut dapat terganggu
Jangan tutup ventilasi pendingin untuk menjaga aliran udara
Hati-hati, jangan mengencangkan sekrup terminal terlalu kencang. Torsi tidak boleh melebihi 1 Nm (14 Lb-in atau 10 KgF-cm), suhu Min.11.52°C, gunakan konduktor tembaga saja.
Kecuali kabel termokopel, semua kabel harus menggunakan konduktor tembaga untai dengan ukuran maksimum 18 AWG.
JAMINAN
Brainchild Electronic Co., Ltd. dengan senang hati menawarkan saran tentang penggunaan berbagai produknya.
Namun, Brainchild tidak memberikan jaminan atau pernyataan apa pun mengenai kesesuaian untuk penggunaan, atau penerapan produknya oleh Pembeli. Pemilihan, penerapan, atau penggunaan produk Brainchild merupakan tanggung jawab Pembeli. Tidak ada klaim yang akan diizinkan untuk segala kerusakan atau kerugian, baik langsung, tidak langsung, insidental, khusus, atau konsekuensial. Spesifikasi dapat berubah tanpa pemberitahuan. Selain itu, Brainchild berhak untuk membuat perubahan-tanpa pemberitahuan kepada Pembeli-pada bahan atau pemrosesan yang tidak memengaruhi kepatuhan terhadap spesifikasi yang berlaku. Produk Brainchild dijamin bebas dari cacat bahan dan pengerjaan selama 18 bulan setelah pengiriman ke pembeli pertama untuk digunakan. Periode perpanjangan tersedia dengan biaya tambahan berdasarkan permintaan. Tanggung jawab tunggal Brainchild berdasarkan garansi ini, atas pilihan Brainchild, terbatas pada penggantian atau perbaikan, gratis, atau pengembalian harga pembelian dalam periode garansi yang ditentukan. Garansi ini tidak berlaku untuk kerusakan yang diakibatkan oleh transportasi, perubahan, penyalahgunaan, atau penyalahgunaan.
PENGEMBALIAN
Pengembalian produk tidak dapat diterima tanpa formulir Otorisasi Material Pengembalian (RMA) yang lengkap.
CATATAN:
Informasi dalam panduan pengguna ini dapat berubah tanpa pemberitahuan.
Hak cipta 2023, The Brainchild Electronic Co., Ltd., semua hak dilindungi undang-undang. Tidak ada bagian dari publikasi ini yang boleh direproduksi, dikirimkan, ditranskripsi, atau disimpan dalam sistem pencarian, atau diterjemahkan ke dalam bahasa apa pun dalam bentuk apa pun dengan cara apa pun tanpa izin tertulis dari Brainchild Electronic Co., Ltd.
![]() Untuk kebutuhan perbaikan atau pemeliharaan, silakan hubungi kami.
Untuk kebutuhan perbaikan atau pemeliharaan, silakan hubungi kami.
Elektronik Co., Ltd.
No.209, Chung Yang Rd., Distrik Nan Kang.,
Taipei 11573, Taiwan
Telp: 886-2-27861299
Telp.: 886-2-27861395
web lokasi: http://www.brainchildtw.com![]()
Dokumen / Sumber Daya
 |
Kontroler Mikroprosesor Berbasis Logika Fuzzy BrainChild BTC-9090 [Bahasa Indonesia:] Panduan Instruksi BTC-9090, BTC-9090 G UL, Pengontrol Berbasis Mikroprosesor Logika Fuzzy BTC-9090, Pengontrol Berbasis Mikroprosesor Logika Fuzzy, Pengontrol Berbasis Mikroprosesor, Pengontrol Berbasis Prosesor, Pengontrol Berbasis |