![]() BTC-9090 Fuzzy Logic მიკროპროცესორზე დაფუძნებული კონტროლერი
BTC-9090 Fuzzy Logic მიკროპროცესორზე დაფუძნებული კონტროლერი
ინსტრუქციის სახელმძღვანელო
შესავალი
ეს სახელმძღვანელო შეიცავს ინფორმაციას Brainchild მოდელის BTC-9090 Fuzzy Logic მიკროპროცესორზე დაფუძნებული კონტროლერის ინსტალაციისა და მუშაობის შესახებ.
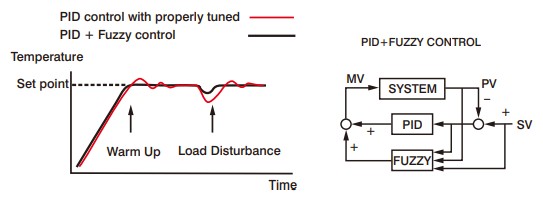
Fuzzy Logic არის ამ მრავალმხრივი კონტროლერის მნიშვნელოვანი მახასიათებელი. მიუხედავად იმისა, რომ PID კონტროლი ფართოდ იქნა მიღებული ინდუსტრიების მიერ, მაგრამ PID კონტროლისთვის რთულია ზოგიერთ დახვეწილ სისტემასთან ეფექტური მუშაობა, მაგ.ampმეორე რიგის სისტემები, დიდი დროის ჩამორჩენა, სხვადასხვა დაყენების წერტილები, სხვადასხვა დატვირთვები და ა.შ. მინუსების გამოtagმაკონტროლებელი პრინციპებისა და PID კონტროლის ფიქსირებული მნიშვნელობების მიხედვით, არაეფექტურია სისტემების მრავალი ჯიშის კონტროლი და შედეგი აშკარად იმედგაცრუებულია ზოგიერთი სისტემისთვის. Fuzzy Logic აკონტროლებს ნაკლოვანებებსtagE PID კონტროლის, ის აკონტროლებს სისტემას ეფექტური გზით ადრე მიღებული გამოცდილებით. Fuzzy Logic-ის ფუნქციაა PID მნიშვნელობების ირიბად რეგულირება, რათა მანიპულაციის გამომავალი მნიშვნელობა MV მოქნილად მორგებული იყოს და სწრაფად მოერგოს სხვადასხვა პროცესებს. ამ გზით, ის საშუალებას აძლევს პროცესს მიაღწიოს თავის წინასწარ განსაზღვრულ დადგენილ წერტილს უმოკლეს დროში მინიმალური გადაჭარბებით რეგულირების ან გარე დარღვევის დროს. PID კონტროლისგან განსხვავებული ციფრული ინფორმაციით, Fuzzy Logic არის კონტროლი ენის ინფორმაციით.
გარდა ამისა, ამ ინსტრუმენტს აქვს ერთჯერადი ფუნქციებიtagეჰamp და დადგომა, ავტომატური დაყენება და ხელით რეჟიმის შესრულება. გამოყენების სიმარტივე ასევე მნიშვნელოვანი ფუნქციაა.
ნუმერაციის სისტემა
მოდელი No. ![]() (1) დენის შეყვანა
(1) დენის შეყვანა
| 4 | 90-264 VAC |
| 5 | 20-32VAC/VDC |
| 9 | სხვა |
(2) სიგნალის შეყვანა
1 0 – 5V 3 PT100 DIN 5 TC 7 0 – 20mA 8 0 – 10V
(3) დიაპაზონის კოდი
| 1 | კონფიგურირებადი |
| 9 | სხვა |
(4) კონტროლის რეჟიმი
| 3 | PID / ON-OFF კონტროლი |
(5) გამომავალი 1 ვარიანტი
| 0 | არცერთი |
| 1 | რელე რეიტინგული 2A/240VAC რეზისტენტული |
| 2 | SSR დისკი რეიტინგული 20mA/24V |
| 3 | 4-20 mA ხაზოვანი, მაქს. დატვირთვა 500 ohms (მოდული OM93-1) |
| 4 | 0-20 mA ხაზოვანი, მაქს. დატვირთვა 500 ohms (მოდული OM93-2) |
| 5 | 0-10V წრფივი, მინ. წინაღობა 500K ohms (მოდული OM93-3) |
| 9 | სხვა |
(6) გამომავალი 2 ვარიანტი
| 0 | არცერთი |
(7) განგაშის ვარიანტი
| 0 | არცერთი |
| 1 | რელე რეიტინგული 2A/240VAC რეზისტენტული |
| 9 | სხვა |
(8) კომუნიკაცია
| 0 | არცერთი |
წინა პანელის აღწერა
 შეყვანის დიაპაზონი და სიზუსტე
შეყვანის დიაპაზონი და სიზუსტე
| IN | სენსორი | შეყვანის ტიპი | დიაპაზონი (ძვ. წ.) | სიზუსტე |
| 0 | J | რკინა-კონსტანტინე | -50-დან 999 წლამდე ძვ.წ | A2 ძვ.წ |
| 1 | K | Chromel-Alumel | -50-დან 1370 წლამდე ძვ.წ | A2 ძვ.წ |
| 2 | T | სპილენძ-კონსტანტინე | -270-დან 400 წლამდე ძვ.წ | A2 ძვ.წ |
| 3 | E | Chromel-Constantan | -50-დან 750 წლამდე ძვ.წ | A2 ძვ.წ |
| 4 | B | Pt30%RH/Pt6%RH | 300-დან 1800 წლამდე | A3 ძვ.წ |
| 5 | R | Pt13%RH/Pt | 0-დან 1750 წლამდე | A2 ძვ.წ |
| 6 | S | Pt10%RH/Pt | 0-დან 1750 წლამდე | A2 ძვ.წ |
| 7 | N | ნიკროსილ-ნისილი | -50-დან 1300 წლამდე ძვ.წ | A2 ძვ.წ |
| 8 | RTD | PT100 ohms (DIN) | -200-დან 400 წლამდე ძვ.წ | A0.4 ძვ.წ |
| 9 | RTD | PT100 ohms (JIS) | -200-დან 400 წლამდე ძვ.წ | A0.4 ძვ.წ |
| 10 | ხაზოვანი | -10 მმ-დან 60 მვ-მდე | -1999-დან 9999-მდე | A0.05% |
სპეციფიკაციები
INPUT
| თერმოწყვილი (T/C): | ტიპი J, K, T, E, B, R, S, N. |
| RTD: | PT100 ohm RTD (DIN 43760/BS1904 ან JIS) |
| ხაზოვანი: | -10-დან 60 მვ-მდე, კონფიგურირებადი შეყვანის შესუსტება |
| დიაპაზონი: | მომხმარებლის კონფიგურირებადი, იხილეთ ცხრილი ზემოთ |
| სიზუსტე: | იხილეთ ცხრილი ზემოთ |
| ცივი შეერთების კომპენსაცია: | 0.1 BC/ BC ატმოსფერო ტიპიური |
| სენსორის გატეხვის დაცვა: | დაცვის რეჟიმის კონფიგურირებადია |
| გარე წინააღმდეგობა: | მაქსიმუმ 100 ohms. |
| ნორმალური რეჟიმის უარყოფა: | 60 დბ |
| ჩვეულებრივი რეჟიმის უარყოფა: | 120 დბ |
| Sample შეფასება: | 3 ჯერ / წამში |
კონტროლი
| პროპორციული ზოლი: | 0 – 200 BC (0-360BF) |
| გადატვირთვა ( ინტეგრალური ): | 0 - 3600 წამი |
| კურსი (წარმოებული): | 0 - 1000 წამი |
| Ramp შეფასება: | 0 – 200.0 BC /წთ (0 – 360.0 BF /წთ) |
| დასახლება: | 0-3600 წუთი |
| ᲩᲐᲠᲗᲕᲐ ᲒᲐᲛᲝᲠᲗᲕᲐ: | რეგულირებადი ჰისტერეზით (0-20% SPAN) |
| ციკლის დრო: | 0-120 წამი |
| საკონტროლო მოქმედება: | პირდაპირი (გაციებისთვის) და საპირისპირო (გასათბობად) |
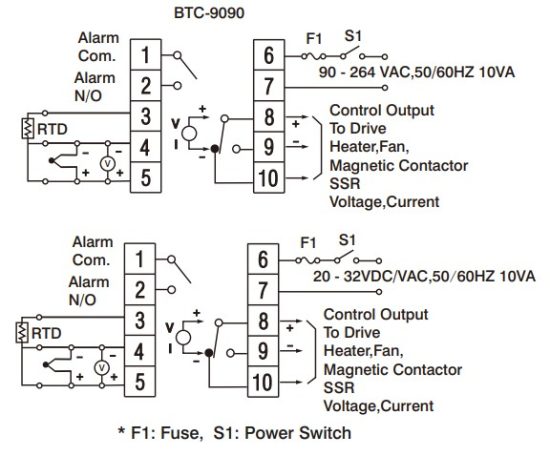
| სიმძლავრე | 90-264VAC, 50/60Hz 10VA 20-32VDC/VAC, 50/60Hz 10VA |
ეკოლოგიური და ფიზიკური
| უსაფრთხოება: | UL 61010-1, მე-3 გამოცემა. CAN/CSA-C22.2 No. 61010-1(2012-05), მე-3 გამოცემა. |
| EMC ემისია: | EN50081-1 |
| EMC იმუნიტეტი: | EN50082-2 |
| ოპერაციული ტემპერატურა: | -10-დან 50 წლამდე ძვ.წ |
| ტენიანობა: | 0-დან 90% RH (არაკოდირებადი) |
| იზოლაცია: | 20 M ohms min. (500 VDC) |
| დაშლა: | AC 2000V, 50/60 Hz, 1 წუთი |
| ვიბრაცია: | 10 - 55 ჰც, ampლიტუდა 1 მმ |
| შოკი: | 200 მ/წმ (20გრ) |
| წმინდა წონა: | 170 გრამი |
| საბინაო მასალები: | პოლიკარბონატული პლასტმასი |
| სიმაღლე: | 2000 მ-ზე ნაკლები |
| შიდა გამოყენება | |
| Overvoltage კატეგორია | II |
| დაბინძურების ხარისხი: | 2 |
| დენის შეყვანის ვოლტას რყევები: | ნომინალური მოცულობის 10%.tage |
ინსტალაცია
6.1 ზომები და პანელის ამოჭრა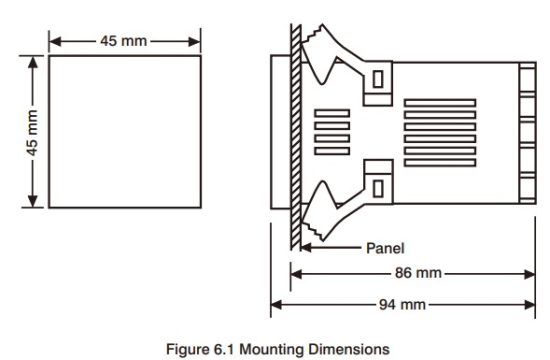 6.2 გაყვანილობის დიაგრამა
6.2 გაყვანილობის დიაგრამა
კალიბრაცია
შენიშვნა: ნუ გააგრძელებთ ამ განყოფილებას, თუ კონტროლერის ხელახალი კალიბრაციის აუცილებლობა არ არის. ყველა წინა კალიბრაციის თარიღი დაიკარგება. არ სცადოთ ხელახალი კალიბრაცია, თუ არ გაქვთ შესაბამისი კალიბრაციის მოწყობილობა. თუ კალიბრაციის მონაცემები დაიკარგება, თქვენ უნდა დააბრუნოთ კონტროლერი თქვენს მიმწოდებელს, რომელსაც შეუძლია გადაიხადოს ხელახალი დაკალიბრება.
დაკალიბრებამდე დარწმუნდით, რომ ყველა პარამეტრის პარამეტრი სწორია (შეყვანის ტიპი, C/F, გარჩევადობა, დაბალი დიაპაზონი, მაღალი დიაპაზონი).
- ამოიღეთ სენსორის შეყვანის გაყვანილობა და დააკავშირეთ სწორი ტიპის სტანდარტული შეყვანის სიმულატორი კონტროლერის შესასვლელთან. შეამოწმეთ სწორი პოლარობა. დააყენეთ იმიტირებული სიგნალი, რომ დაემთხვა დაბალი პროცესის სიგნალს (მაგ. ნულოვანი გრადუსი).
- გამოიყენეთ გადახვევის ღილაკი სანამ ”
 ” გამოჩნდება PV ეკრანზე. (იხილეთ 8.2)
” გამოჩნდება PV ეკრანზე. (იხილეთ 8.2) - გამოიყენეთ ზემოთ და ქვევით კლავიშები, სანამ PV ეკრანი არ წარმოადგენს იმიტირებულ შეყვანას.
- დააჭირეთ დაბრუნების ღილაკს მინიმუმ 6 წამის განმავლობაში (მაქსიმუმ 16 წამი), შემდეგ გაათავისუფლეთ. ეს შეაქვს დაბალი კალიბრაციის ფიგურას კონტროლერის არასტაბილურ მეხსიერებაში.
- დააჭირეთ და გაათავისუფლეთ გადახვევის გასაღები. ”
 ” გამოჩნდება PV ეკრანზე. ეს მიუთითებს კალიბრაციის მაღალ წერტილზე.
” გამოჩნდება PV ეკრანზე. ეს მიუთითებს კალიბრაციის მაღალ წერტილზე. - გაზარდეთ იმიტირებული შეყვანის სიგნალი, რათა დაემთხვეს მაღალი 11პროცესის სიგნალს (მაგ. 100 გრადუსი).
- გამოიყენეთ ზემოთ და ქვევით კლავიშები, სანამ SV ეკრანი არ წარმოადგენს სიმულირებულ მაღალ შეყვანას.
- დააჭირეთ დაბრუნების ღილაკს მინიმუმ 6 წამის განმავლობაში (მაქსიმუმ 16 წამი), შემდეგ გაათავისუფლეთ. ეს შეაქვს მაღალი კალიბრაციის ფიგურას კონტროლერის არასტაბილურ მეხსიერებაში.
- გამორთეთ მოწყობილობა, ამოიღეთ ყველა სატესტო გაყვანილობა და შეცვალეთ სენსორის გაყვანილობა (დაკვირვებით პოლარობაზე).
ოპერაცია
8.1 კლავიატურაზე მუშაობა
* ჩართვის შემთხვევაში, მას უნდა დაელოდოს 12 წამს, რათა დაიმახსოვროს პარამეტრების ახალი მნიშვნელობები, როდესაც ის შეიცვალა.
| ხელის კლავიშები | ფუნქცია | აღწერა |
| გადახვევის გასაღები | მიიტანეთ ინდექსის ჩვენება სასურველ პოზიციაზე. ამ კლავიატურაზე დაჭერით ინდექსი უმჯობესდებოდა განუწყვეტლივ და ციკლურად. |
|
| ზემოთ გასაღები | ზრდის პარამეტრს | |
| ქვემოთ გასაღები | ამცირებს პარამეტრს | |
| დაბრუნების გასაღები | აღადგენს კონტროლერს ნორმალურ მდგომარეობაში. ასევე აჩერებს ავტომატურ რეგულირებას, გამომავალი პროცენტსtage მონიტორინგი და მექანიკური რეჟიმის მუშაობა. | |
| დააჭირეთ |
გრძელი გადახვევა | იძლევა მეტი პარამეტრის შემოწმებას ან შეცვლას. |
| დააჭირეთ |
ხანგრძლივი დაბრუნება | 1. ახორციელებს ავტომატური რეგულირების ფუნქციას 2. კალიბრირებს კონტროლს კალიბრაციის დონეზე |
| დააჭირეთ |
გამომავალი პროცენტიtage მონიტორი | საშუალებას აძლევს მითითებული წერტილის ჩვენებას მიუთითოს საკონტროლო გამომავალი მნიშვნელობა. |
| დააჭირეთ |
ხელით რეჟიმის შესრულება | საშუალებას აძლევს კონტროლერს შევიდეს ხელით რეჟიმში. |
8.2 ნაკადის სქემა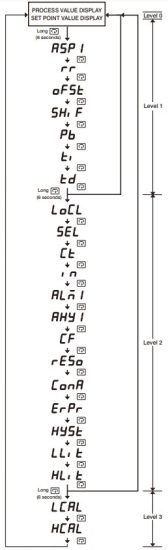 "დაბრუნების" ღილაკზე დაჭერა შესაძლებელია ნებისმიერ დროს.
"დაბრუნების" ღილაკზე დაჭერა შესაძლებელია ნებისმიერ დროს.
ეს მოუწოდებს ეკრანს დაუბრუნდეს პროცესის მნიშვნელობას/დადგენის წერტილის მნიშვნელობას.
გამოყენებული სიმძლავრე:
 ნაჩვენებია 4 წამის განმავლობაში. (პროგრამული უზრუნველყოფის ვერსია 3.6 ან უფრო მაღალი)
ნაჩვენებია 4 წამის განმავლობაში. (პროგრამული უზრუნველყოფის ვერსია 3.6 ან უფრო მაღალი) LED ტესტი. ყველა LED სეგმენტი უნდა იყოს განათებული 4 წამის განმავლობაში.
LED ტესტი. ყველა LED სეგმენტი უნდა იყოს განათებული 4 წამის განმავლობაში.- მითითებულია პროცესის ღირებულება და მითითებული წერტილი.
8.3 პარამეტრის აღწერა
| ინდექსის კოდი | აღწერილობის რეგულირების დიაპაზონი | ** ნაგულისხმევი პარამეტრი | ||
| SV | Set Point Value Control *დაბალი ლიმიტი მაღალი ლიმიტის მნიშვნელობამდე |
განუსაზღვრელი | ||
| განგაშის დაყენების წერტილის მნიშვნელობა * დაბალი ლიმიტი მაღალი ლიმიტის ვალue. if * 0-დან 3600 წუთამდე (თუ * დაბალი ლიმიტი მინუსs დააყენეთ წერტილი მაღალ ლიმიტზე მინუს დაყენებული წერტილის მნიშვნელობა (თუ |
200 წ | |||
| Ramp პროცესის მნიშვნელობის შეფასება პროცესის მკვეთრი ცვლილების შესაზღუდად (რბილი დაწყება) * 0-დან 200.0 BC-მდე (360.0 BF) / წუთში (თუ * 0-დან 3600 ერთეულ/წუთამდე (თუ |
0 BC / წთ. | |||
| ოფსეტური მნიშვნელობა ხელით გადატვირთვისთვის (თუ |
0.0 % | |||
| ოფსეტური ცვლა პროცესის მნიშვნელობისთვის * -111 ძვ.წ. 111 წ |
0 წ | |||
| პროპორციული ბენდი
* 0-დან 200 წლამდე (დაყენებულია 0-ზე ჩართვა-გამორთვის კონტროლისთვის) |
10 წ | |||
| ინტეგრალური (გადატვირთვის) დრო * 0-დან 3600 წამამდე |
120 წმ. | |||
| წარმოებული (რეიტი) დრო * 0-დან 360.0 წამამდე |
30 წმ. | |||
| ლოკალური რეჟიმი 0: კონტროლის პარამეტრების შეცვლა შეუძლებელია 1: კონტროლის პარამეტრების შეცვლა შესაძლებელია |
1 | |||
| პარამეტრის არჩევა ( საშუალებას იძლევა დამატებითი პარამეტრების არჩევა ხელმისაწვდომი იყოს უსაფრთხოების 0 დონეზე) |
0 | |||
| პროპორციული ციკლის დრო * 0-დან 120 წამამდე |
რელე | 20 | ||
| პულსირებული ტtage | 1 | |||
| ხაზოვანი ვოლტი / mA | 0 | |||
| შეყვანის რეჟიმის შერჩევა 0: J ტიპის T/C 6: S ტიპის T/C 1: K ტიპის T/C 7: N ტიპის T/C 2: T ტიპის T/C 8: PT100 DIN 3: E ტიპის T/C 9: PT100 JIS 4: B ტიპის T/C 10: Linear Voltage ან მიმდინარე 5: R ტიპის T/C შენიშვნა: T/C-დახურეთ შედუღების უფსკრული G5, RTD-გახსენით G5 |
T/C | 0 | ||
| RTD | 8 | |||
| ხაზოვანი | 10 | |||
| განგაშის რეჟიმის შერჩევა 0: პროცესის მაღალი სიგნალიზაცია 8: Outband სიგნალიზაცია 1: პროცესის დაბალი სიგნალიზაცია 9: შემომავალი სიგნალიზაცია 2: გადახრის მაღალი სიგნალიზაცია 10: დათრგუნეთ გამომავალი სიგნალიზაცია 3: გადახრის დაბალი სიგნალიზაცია 11: დათრგუნეთ შემომავალი სიგნალიზაცია 4: დათრგუნეთ პროცესის მაღალი სიგნალიზაცია 12: სიგნალიზაციის რელე გამორთულია როგორც 5: პროცესის დაბალი სიგნალის დათრგუნვა Dwell Time Out 6: დათრგუნვა გადახრის მაღალი სიგნალიზაცია 13: სიგნალიზაციის რელე ჩართულია როგორც 7: გადახრის დათრგუნვა დაბალი სიგნალიზაციის დროის ამოწურვა |
0 | |||
| განგაშის ჰისტერეზი 1 * ესპანეთის 0-დან 20%-მდე |
0.5% | |||
| BC / BF შერჩევა 0: BF, 1: ძვ.წ |
1 | |||
| რეზოლუციის შერჩევა 0: ათწილადი ქულა არ არის 2: 2 ციფრი ათწილადი 1: 1 ციფრი ათწილადი 3: 3 ციფრი ათწილადი (2 და 3 შეიძლება გამოყენებულ იქნას მხოლოდ ხაზოვანი ტომისთვისtagე ან მიმდინარე |
0 |
|||
| საკონტროლო მოქმედება 0: პირდაპირი (გაგრილება) მოქმედება 1: საპირისპირო (სითბო) მოქმედება |
1 | |||
| შეცდომის დაცვა 0: კონტროლი გამორთულია, სიგნალიზაცია გამორთულია 2: კონტროლი ჩართულია, სიგნალიზაცია გამორთულია 1: კონტროლი გამორთულია, სიგნალიზაცია ჩართულია 3: კონტროლი ჩართულია, სიგნალიზაცია ჩართულია |
1 |
|||
| ჰისტერეზი ჩართვა/გამორთვის კონტროლისთვის *0-დან 20%-მდე SPAN |
0.5% | |||
| დიაპაზონის დაბალი ლიმიტი | -50 ძვ.წ | |||
| დიაპაზონის მაღალი ლიმიტი | 1000 წ | |||
| დაბალი კალიბრაციის ფიგურა | 0 წ | |||
| მაღალი კალიბრაციის ფიგურა | 800 წ | |||
შენიშვნები: * პარამეტრის დიაპაზონის რეგულირება
** ქარხნული პარამეტრები. პროცესის სიგნალიზაცია არის ფიქსირებული ტემპერატურის წერტილებზე. გადახრის სიგნალიზაცია მოძრაობს მითითებული წერტილების მნიშვნელობით.
8.4 ავტომატური დაყენება
- დარწმუნდით, რომ კონტროლერი სწორად არის კონფიგურირებული და დაინსტალირებული.
- დარწმუნდით, რომ პროპორციული ზოლი 'Pb' არ არის დაყენებული '0'-ზე.
- დააჭირეთ დაბრუნების ღილაკს მინიმუმ 6 წამის განმავლობაში (მაქსიმუმ 16 წამი). ეს ახდენს ავტომატური რეგულირების ფუნქციის ინიციალიზებას. (ავტომატური დარეგულირების პროცედურის შესაწყვეტად დააჭირეთ Return Key და გაათავისუფლეთ).
- PV დისპლეის ქვედა მარჯვენა კუთხეში ათწილადი წერტილი ციმციმებს, რათა მიუთითებდეს, რომ ავტომატური დალაგება მიმდინარეობს. ავტომატური რეგულირება სრულდება, როცა ციმციმა შეწყდება.
- კონკრეტული პროცესიდან გამომდინარე, ავტომატურ დარეგულირებას შეიძლება ორ საათამდე დასჭირდეს. პროცესებს დიდი ხნის შეფერხებებით დარეგულირებას ყველაზე დიდი დრო დასჭირდება. დაიმახსოვრეთ, სანამ ჩვენების წერტილი ციმციმებს, კონტროლერი ავტომატური რეგულირებაა.
შენიშვნა: თუ AT შეცდომაა ( ![]() ) ხდება, ავტომატური ტუნინგის პროცესი შეწყვეტილია სისტემის ჩართვა-გამორთვის კონტროლში მოქმედი სისტემის გამო (PB=0).
) ხდება, ავტომატური ტუნინგის პროცესი შეწყვეტილია სისტემის ჩართვა-გამორთვის კონტროლში მოქმედი სისტემის გამო (PB=0).
პროცესი ასევე შეწყდება, თუ დაყენებული წერტილი დაყენებულია პროცესის ტემპერატურასთან ახლოს, ან თუ სისტემაში არ არის საკმარისი სიმძლავრე დადგენილ წერტილამდე (მაგ. არაადეკვატური გათბობის სიმძლავრე ხელმისაწვდომი). ავტომატური რეგულირების დასრულების შემდეგ, ახალი PID პარამეტრები ავტომატურად შედის კონტროლერის არასტაბილურ მეხსიერებაში.
8.5 PID-ის ხელით რეგულირება
მიუხედავად იმისა, რომ ავტომატური რეგულირების ფუნქცია ირჩევს კონტროლის პარამეტრებს, რომლებიც დამაკმაყოფილებელი უნდა იყოს პროცესების უმრავლესობისთვის, თქვენ შეიძლება დაგჭირდეთ დროდადრო ამ თვითნებური პარამეტრების კორექტირება. ეს შეიძლება მოხდეს იმ შემთხვევაში, თუ პროცესში გარკვეული ცვლილებები განხორციელდება ან თუ გსურთ კონტროლის პარამეტრების „დაზუსტება“.
მნიშვნელოვანია, რომ კონტროლის პარამეტრებში ცვლილებების შეტანამდე ჩაწეროთ მიმდინარე პარამეტრები მომავალი მითითებისთვის. შეიტანეთ მცირე ცვლილებები მხოლოდ ერთ პარამეტრში ერთდროულად და დააკვირდით შედეგებს პროცესის დროს. იმის გამო, რომ თითოეული პარამეტრი ურთიერთქმედებს ერთმანეთთან, ადვილია შედეგების დაბნეულობა, თუ არ იცნობთ პროცესის კონტროლის პროცედურებს.
TUNING GUIDE
პროპორციული ბენდი
| სიმპტომი | გამოსავალი |
| ნელი რეაგირება | PB ღირებულების შემცირება |
| მაღალი გადაჭარბება ან რხევები | გაზარდეთ PB ღირებულება |
ინტეგრალური დრო (გადატვირთვა)
| სიმპტომი | გამოსავალი |
| ნელი რეაგირება | ინტეგრალური დროის შემცირება |
| არასტაბილურობა ან რხევები | ინტეგრალური დროის გაზრდა |
წარმოებული დრო (განაკვეთი)
| სიმპტომი | გამოსავალი |
| ნელი პასუხი ან რხევები | დერივის შემცირება. დრო |
| მაღალი გადაჭარბება | წარმოებულის გაზრდა. დრო |
8.6 მექანიკური დაყენების პროცედურა
ნაბიჯი 1: დაარეგულირეთ ინტეგრალური და წარმოებული მნიშვნელობები 0-ზე. ეს აფერხებს სიჩქარეს და გადატვირთვის მოქმედებას
ნაბიჯი 2: დააყენეთ პროპორციული ზოლის თვითნებური მნიშვნელობა და დააკვირდით კონტროლის შედეგებს
ნაბიჯი 3: თუ თავდაპირველი პარამეტრი იწვევს პროცესის დიდ რხევას, მაშინ თანდათან გაზარდეთ პროპორციული ზოლი, სანამ არ მოხდება სტაბილური ციკლი. ჩაწერეთ ეს პროპორციული დიაპაზონის მნიშვნელობა (Pc).
ნაბიჯი 4: გაზომეთ სტაბილური ველოსიპედის პერიოდი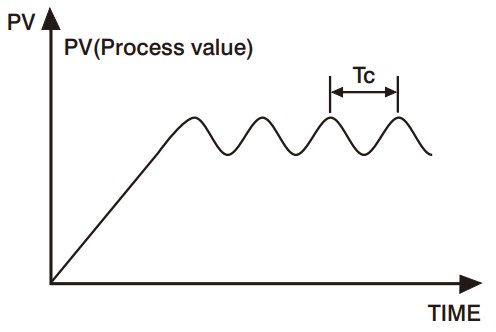 ჩაწერეთ ეს მნიშვნელობა (Tc) წამებში
ჩაწერეთ ეს მნიშვნელობა (Tc) წამებში
ნაბიჯი 5: კონტროლის პარამეტრები განისაზღვრება შემდეგნაირად:
პროპორციის დიაპაზონი(PB)=1.7 ც
ინტეგრალური დრო (TI)=0.5 ტკ
წარმოებული დრო(TD)=0.125 Tc
8.7 რAMP & DWELL
BTC-9090 კონტროლერი შეიძლება იყოს კონფიგურირებული ისე, რომ იმოქმედოს როგორც ფიქსირებული პუნქტის კონტროლერი ან როგორც ერთი ramp კონტროლერი ჩართულია. ეს ფუნქცია მომხმარებელს საშუალებას აძლევს დააყენოს წინასწარ განსაზღვრული ramp სიჩქარე, რათა პროცესმა თანდათან მიაღწიოს დადგენილ ტემპერატურას, რითაც წარმოიქმნება "რბილი დაწყების" ფუნქცია.
საცხოვრებლის ტაიმერი ჩართულია BTC-9090-ში და განგაშის რელე შეიძლება იყოს კონფიგურირებული ისე, რომ უზრუნველყოს შეჩერების ფუნქცია, რომელიც გამოიყენება r-თან ერთად.amp ფუნქცია.
რamp განაკვეთი განისაზღვრება ' ![]() პარამეტრი, რომელიც შეიძლება დარეგულირდეს 0-დან 200.0 BC/წთ დიაპაზონში. რamp განაკვეთის ფუნქცია გამორთულია, როდესაც '
პარამეტრი, რომელიც შეიძლება დარეგულირდეს 0-დან 200.0 BC/წთ დიაპაზონში. რamp განაკვეთის ფუნქცია გამორთულია, როდესაც ' ![]() პარამეტრი დაყენებულია '0'-ზე.
პარამეტრი დაყენებულია '0'-ზე.
გაჟღენთის ფუნქცია ჩართულია განგაშის გამომავალი კონფიგურაციით, რათა იმოქმედოს როგორც დველი ტაიმერი. პარამეტრი ![]() უნდა დააყენოთ მნიშვნელობა 12. განგაშის კონტაქტი ახლა იმუშავებს, როგორც ტაიმერის კონტაქტი, კონტაქტი იკეტება ჩართვისას და იხსნება გასული დროის შემდეგ პარამეტრზე დაყენებული
უნდა დააყენოთ მნიშვნელობა 12. განგაშის კონტაქტი ახლა იმუშავებს, როგორც ტაიმერის კონტაქტი, კონტაქტი იკეტება ჩართვისას და იხსნება გასული დროის შემდეგ პარამეტრზე დაყენებული![]() .
.
თუ კონტროლერის ელექტრომომარაგება ან გამომავალი სადენიანია სიგნალიზაციის კონტაქტის საშუალებით, კონტროლერი იმუშავებს როგორც გარანტირებული გაჟღენთილი კონტროლერი.
ყოფილშიampრ-ის ქვემოთamp მაჩვენებელი დაყენებულია 5 BC/წთ, ![]() =12 და
=12 და ![]() =15 (წუთი). სიმძლავრე გამოიყენება ნულოვანი დროით და პროცესი ადის 5 BC/წუთში დადგენილ წერტილამდე 125 BC. დადგენილ წერტილამდე მიღწევისთანავე ჩართულია დაბინძურების ტაიმერი და 15 წუთის გაჟღენთილი დროის შემდეგ, განგაშის კონტაქტი გაიხსნება და გამორთავს გამომავალს. პროცესის ტემპერატურა საბოლოოდ დაეცემა განუსაზღვრელი სიჩქარით.
=15 (წუთი). სიმძლავრე გამოიყენება ნულოვანი დროით და პროცესი ადის 5 BC/წუთში დადგენილ წერტილამდე 125 BC. დადგენილ წერტილამდე მიღწევისთანავე ჩართულია დაბინძურების ტაიმერი და 15 წუთის გაჟღენთილი დროის შემდეგ, განგაშის კონტაქტი გაიხსნება და გამორთავს გამომავალს. პროცესის ტემპერატურა საბოლოოდ დაეცემა განუსაზღვრელი სიჩქარით.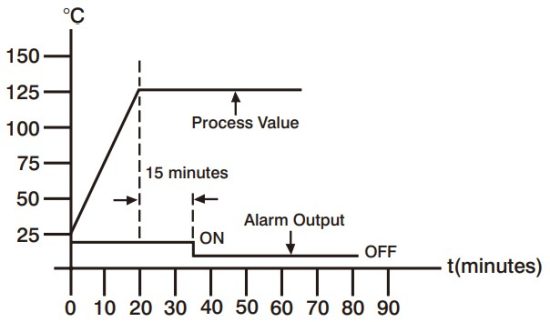 დაბინავების ფუნქცია შეიძლება გამოყენებულ იქნას გარე მოწყობილობის მუშაობისთვის, როგორიცაა სირენა, რათა გააფრთხილოს, როდესაც დატენვის დრო მიღწეულია.
დაბინავების ფუნქცია შეიძლება გამოყენებულ იქნას გარე მოწყობილობის მუშაობისთვის, როგორიცაა სირენა, რათა გააფრთხილოს, როდესაც დატენვის დრო მიღწეულია.
უნდა დააყენოთ მნიშვნელობა 13. განგაშის კონტაქტი ახლა იმუშავებს როგორც ტაიმერის კონტაქტი, როდესაც კონტაქტი გახსნილია თავდაპირველი გაშვებისას. ტაიმერი იწყებს ათვლას, როგორც კი მითითებული წერტილის ტემპერატურა მიაღწევს. პარამეტრის გასვლის შემდეგ, განგაშის კონტაქტი იხურება.
შეცდომის შეტყობინებები
| სიმპტომი | მიზეზი (ებ) | გამოსავალი (ებ) |
| სენსორის გატეხვის შეცდომა | შეცვალეთ RTD ან სენსორი გამოიყენეთ ხელით რეჟიმის მუშაობა |
|
| პროცესის ჩვენება დაბალი დიაპაზონის მითითებული წერტილის მიღმა | ხელახლა დაარეგულირეთ მნიშვნელობა | |
| პროცესის ჩვენება მაღალი დიაპაზონის მითითებული წერტილის მიღმა | ხელახლა დაარეგულირეთ მნიშვნელობა | |
| ანალოგური ჰიბრიდული მოდულის დაზიანება | მოდულის შეცვლა. შეამოწმეთ დაზიანების გარე წყარო, როგორიცაა გარდამავალი ტtage spikes | |
| ავტომატური რეგულირების პროცედურის არასწორი მოქმედება პროპ. დიაპაზონი დაყენებულია 0-ზე | გაიმეორეთ პროცედურა. გაზარდეთ პროპ. დიაპაზონი 0-ზე მეტ რიცხვამდე | |
| მექანიკური რეჟიმი დაუშვებელია ON-OFF მართვის სისტემისთვის | პროპორციული ზოლის გაზრდა | |
| შეამოწმეთ ჯამის შეცდომა, მეხსიერებაში მნიშვნელობები შეიძლება შემთხვევით შეიცვალა | შეამოწმეთ და ხელახლა დააკონფიგურირეთ კონტროლის პარამეტრები |
დამატებითი ინსტრუქცია ახალი ვერსიისთვის
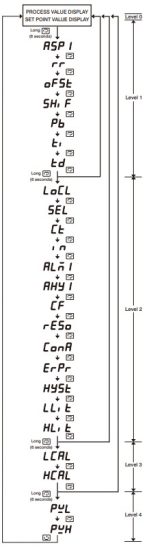
ერთეულს firmware ვერსიით V3.7 აქვს ორი დამატებითი პარამეტრი - "PVL" და "PVH", რომლებიც მდებარეობს მე-4 დონეზე, როგორც პარამეტრების ნაკადის სქემა მარცხენა მხარეს.
როდესაც გჭირდებათ LLit მნიშვნელობის უფრო მაღალი მნიშვნელობის შეცვლა ან HLit მნიშვნელობის უფრო დაბალი მნიშვნელობის შეცვლა, შემდეგი პროცედურები უნდა დაიცვათ, რათა PVL მნიშვნელობა იყოს LCAL მნიშვნელობის მეათედი და PVH ალუ HCAL მნიშვნელობის მეათედის ექვივალენტი. წინააღმდეგ შემთხვევაში, პროცესის გაზომილი მნიშვნელობები არ იქნება სპეციფიკაციები.
- გამოიყენეთ გადახვევის ღილაკი, სანამ "LLit" არ გამოჩნდება PV ეკრანზე. გამოიყენეთ ზევით და ქვევით კლავიშები LLit მნიშვნელობის დასაყენებლად უფრო მაღალ მნიშვნელობაზე, ვიდრე ორიგინალური მნიშვნელობა.
- დააჭირეთ და გაათავისუფლეთ გადახვევის ღილაკი, შემდეგ "HLit" გამოჩნდება PV ეკრანზე. გამოიყენეთ ზევით და ქვევით კლავიშები HLit მნიშვნელობის დასაყენებლად უფრო დაბალ მნიშვნელობაზე, ვიდრე ორიგინალური მნიშვნელობა.
- გამორთეთ და ჩართეთ დენი.
- გამოიყენეთ გადახვევის ღილაკი, სანამ "LCAL" არ გამოჩნდება PV ეკრანზე. გაითვალისწინეთ LCAL მნიშვნელობა.
- დააჭირეთ და გაათავისუფლეთ გადახვევის ღილაკი, შემდეგ "HCAL" გამოჩნდება PV ეკრანზე. გაითვალისწინეთ HCAL მნიშვნელობა.
- დააჭირეთ გადახვევის ღილაკს მინიმუმ 6 წამის განმავლობაში და შემდეგ გაათავისუფლეთ, "PVL" გამოჩნდება PV ეკრანზე. გამოიყენეთ UP და Down კლავიშები PVL მნიშვნელობის დასაყენებლად LCAL მნიშვნელობის მეათედზე.
- დააჭირეთ და გაათავისუფლეთ გადახვევის ღილაკი, "PVH" გამოჩნდება PV ეკრანზე. გამოიყენეთ UP და Down კლავიშები PVH მნიშვნელობის დასაყენებლად HCAL მნიშვნელობის მეათედზე.
-გთხოვთ დააინსტალიროთ 20A ამომრთველი ელექტრომომარაგების ბოლოზე
- მტვრის მოსაშორებლად გამოიყენეთ მშრალი ქსოვილი
- ინსტალაცია, რომლის უსაფრთხოება ნებისმიერი სისტემის, რომელიც მოიცავს აღჭურვილობას, პასუხისმგებელია სისტემის ასამბლერზე
- თუ მოწყობილობა გამოიყენება მწარმოებლის მიერ არ განსაზღვრული წესით, აღჭურვილობით უზრუნველყოფილი დაცვა შეიძლება დაირღვეს.
არ დაფაროთ გაგრილების ხვრელები ჰაერის ნაკადის შესანარჩუნებლად
ფრთხილად იყავით, რომ ზედმეტად არ გამკაცრდეს ტერმინალის ხრახნები. ბრუნვის მომენტი არ უნდა აღემატებოდეს. 1 14 Nm (10 Lb-in ან 11.52 KgF-cm), ტემპერატურა Min.60°C, გამოიყენეთ მხოლოდ სპილენძის გამტარები.
თერმოწყვილის გაყვანილობის გარდა, ყველა გაყვანილობა უნდა გამოიყენოს სპილენძის გამტარი მაქსიმალური დიამეტრით 18 AWG.
გარანტია
Brainchild Electronic Co., Ltd. მოხარულია შემოგთავაზოთ წინადადებები მისი სხვადასხვა პროდუქტების გამოყენების შესახებ.
თუმცა, Brainchild არ იძლევა რაიმე სახის გარანტიას ან წარმოდგენას გამოყენებისთვის ვარგისიანობასთან ან მყიდველის მიერ მისი პროდუქტების გამოყენებასთან დაკავშირებით. Brainchild-ის პროდუქტების შერჩევა, გამოყენება ან გამოყენება არის შემსყიდველის პასუხისმგებლობა. არანაირი პრეტენზია არ დაიშვება რაიმე ზიანის ან ზარალის შესახებ, იქნება ეს პირდაპირი, არაპირდაპირი, შემთხვევითი, განსაკუთრებული თუ თანმიმდევრული. სპეციფიკაციები შეიძლება შეიცვალოს გაფრთხილების გარეშე. გარდა ამისა, Brainchild იტოვებს უფლებას შეიტანოს ცვლილებები - შემსყიდველის შეტყობინების გარეშე - მასალებში ან დამუშავებაში, რაც გავლენას არ მოახდენს შესაბამის სპეციფიკაციასთან. Brainchild-ის პროდუქციას გარანტირებული აქვს, რომ არ იყოს დეფექტები მასალასა და სამუშაოში 18 თვის განმავლობაში პირველი მყიდველისთვის გამოსაყენებლად მიტანიდან. მოთხოვნის შემთხვევაში შესაძლებელია გახანგრძლივებული პერიოდი დამატებითი საფასურით. Brainchild-ის ერთპიროვნული პასუხისმგებლობა წინამდებარე გარანტიით, Brainchild-ის არჩევანით, შემოიფარგლება მხოლოდ შეცვლით ან შეკეთებით, უფასოდ, ან შესყიდვის ფასის დაბრუნებით მითითებულ საგარანტიო პერიოდში. ეს გარანტია არ ვრცელდება ტრანსპორტირების, შეცვლის, ბოროტად გამოყენების ან ბოროტად გამოყენების შედეგად წარმოქმნილ ზიანს.
აბრუნებს
არცერთი პროდუქტის დაბრუნება არ შეიძლება მიღებულ იქნეს დაბრუნების მასალის ავტორიზაციის (RMA) ფორმის გარეშე.
შენიშვნა:
ამ მომხმარებლის სახელმძღვანელოში მოცემული ინფორმაცია შეიძლება შეიცვალოს გაფრთხილების გარეშე.
საავტორო უფლება 2023, The Brainchild Electronic Co., Ltd., ყველა უფლება დაცულია. ამ პუბლიკაციის არცერთი ნაწილის რეპროდუცირება, გადაცემა, ტრანსკრიფცია ან შენახვა არ შეიძლება მოძიებულ სისტემაში, ან თარგმნა ნებისმიერ ენაზე რაიმე ფორმით, Brainchild Electronic Co., Ltd.-ის წერილობითი ნებართვის გარეშე.
![]() ნებისმიერი სარემონტო ან ტექნიკური საჭიროებისთვის, გთხოვთ დაგვიკავშირდეთ.
ნებისმიერი სარემონტო ან ტექნიკური საჭიროებისთვის, გთხოვთ დაგვიკავშირდეთ.
Electronic Co., Ltd.
No.209, Chung Yang Rd., Nan Kang Dist.,
ტაიპეი 11573, ტაივანი
ტელ: 886-2-27861299
ფაქსი: 886-2-27861395
web საიტი: http://www.brainchildtw.com![]()
დოკუმენტები / რესურსები
 |
BrainChild BTC-9090 Fuzzy Logic მიკროპროცესორზე დაფუძნებული კონტროლერი [pdf] ინსტრუქციის სახელმძღვანელო BTC-9090, BTC-9090 G UL, BTC-9090 Fuzzy Logic მიკროპროცესორზე დაფუძნებული კონტროლერი, Fuzzy Logic მიკროპროცესორზე დაფუძნებული კონტროლერი, მიკროპროცესორზე დაფუძნებული კონტროლერი, პროცესორზე დაფუძნებული კონტროლერი, დაფუძნებული კონტროლერი |