![]() Controler bazat pe microprocesor BTC-9090 Fuzzy Logic
Controler bazat pe microprocesor BTC-9090 Fuzzy Logic
Manual de instructiuni
INTRODUCERE
Acest manual conține informații pentru instalarea și operarea controlerului Brainchild model BTC-9090 cu microprocesor Fuzzy Logic.
Logica Fuzzy este o caracteristică esențială a acestui controler versatil. Deși controlul PID a fost larg acceptat în industrie, este dificil ca acesta să funcționeze eficient cu unele sisteme sofisticate, de exempluampsisteme de ordinul doi, cu întârziere mare, diverse puncte de referință, diverse sarcini etc. Din cauza dezavantajelortagAvând în vedere principiile de control și valorile fixe ale controlului PID, este ineficient să se controleze sistemele cu o multitudine de variații, iar rezultatul este evident frustrant pentru unele sisteme. Controlul cu logica fuzzy poate depăși dezavantajul.tagÎn cadrul controlului PID, acesta controlează sistemul într-un mod eficient, bazat pe experiențele acumulate anterior. Funcția logicii fuzzy este de a ajusta indirect valorile PID, astfel încât valoarea de ieșire manipulată (MV) să se ajusteze flexibil și să se adapteze rapid la diverse procese. În acest fel, permite unui proces să atingă punctul de referință predeterminat în cel mai scurt timp, cu depășiri minime în timpul reglării sau perturbații externe. Spre deosebire de controlul PID cu informații digitale, logica fuzzy este un control cu informații limbaj.
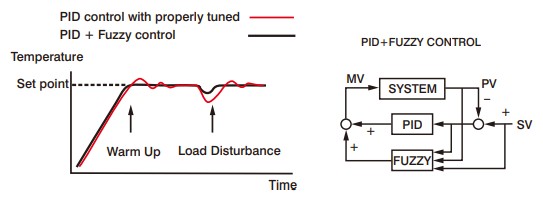
În plus, acest instrument are funcții de singletageramp și temporizare, reglare automată și execuție în mod manual. Ușurința în utilizare este, de asemenea, o caracteristică esențială.
SISTEM DE NUMERAȚIE
Model nr. ![]() (1) Intrare de putere
(1) Intrare de putere
| 4 | 90-264VAC |
| 5 | 20-32 V CA/V CC |
| 9 | Alte |
(2) Intrare semnal
1 0 – 5V 3 PT100 DIN 5 TC 7 0 – 20mA 8 0 – 10V
(3) Codul intervalului
| 1 | Configurabil |
| 9 | Alte |
(4) Mod de control
| 3 | Control PID / ON-OFF |
(5) Opțiunea Ieșire 1
| 0 | Nici unul |
| 1 | Releu rezistiv cu putere nominală de 2A/240VAC |
| 2 | Acționare SSR cu curent nominal de 20mA/24V |
| 3 | 4-20mA liniar, sarcină maximă 500 ohmi (Modul OM93-1) |
| 4 | 0-20mA liniar, sarcină maximă 500 ohmi (Modul OM93-2) |
| 5 | 0-10V liniar, impedanță minimă 500K ohmi (Modul OM93-3) |
| 9 | Alte |
(6) Opțiunea Ieșire 2
| 0 | Nici unul |
(7) Opțiune de alarmă
| 0 | Nici unul |
| 1 | Releu rezistiv cu putere nominală de 2A/240VAC |
| 9 | Alte |
(8) Comunicare
| 0 | Nici unul |
DESCRIEREA PANELULUI FRONTAL
 INTERVAL DE INTRARE ȘI PRECIZIE
INTERVAL DE INTRARE ȘI PRECIZIE
| IN | Senzor | Tip de intrare | Interval (BC) | Precizie |
| 0 | J | Fier-Constantan | -50 până la 999 î.Hr. | A2 BC |
| 1 | K | Chromel-Alumel | -50 până la 1370 î.Hr. | A2 BC |
| 2 | T | Cupru-Constantan | -270 până la 400 î.Hr. | A2 BC |
| 3 | E | Chromel-Constantan | -50 până la 750 î.Hr. | A2 BC |
| 4 | B | Pt30%RH/Pt6%RH | 300 - 1800 î.Hr. | A3 BC |
| 5 | R | Pt13%RH/Pt | 0 - 1750 î.Hr. | A2 BC |
| 6 | S | Pt10%RH/Pt | 0 - 1750 î.Hr. | A2 BC |
| 7 | N | Nicrosil-Nisil | -50 până la 1300 î.Hr. | A2 BC |
| 8 | RTD | PT100 ohmi (DIN) | -200 până la 400 î.Hr. | A0.4 BC |
| 9 | RTD | PT100 ohmi (JIS) | -200 până la 400 î.Hr. | A0.4 BC |
| 10 | Liniar | -10mV până la 60mV | -1999 la 9999 | A0.05% |
SPECIFICAȚII
INTRARE
| Termocuplu (T/C): | tip J, K, T, E, B, R, S, N. |
| RTD: | Termorezistență PT100 ohm (DIN 43760/BS1904 sau JIS) |
| Liniar: | -10 până la 60 mV, atenuare de intrare configurabilă |
| Gamă: | Configurabil de către utilizator, consultați tabelul de mai sus |
| Precizie: | Consultați tabelul de mai sus |
| Compensarea joncțiunii la rece: | 0.1 BC/ BC temperatură ambientală tipică |
| Protecție la rupere senzor: | Mod de protecție configurabil |
| Rezistență externă: | 100 ohmi maxim. |
| Respingere în mod normal: | 60 dB |
| Respingerea modului comun: | 120 dB |
| Sample Rata: | De 3 ori / secundă |
CONTROLA
| Bandă de proporție: | 0 – 200 î.Hr. (0-360 î.Hr.) |
| Resetare (Integrală): | 0 – 3600 de secunde |
| Rată (Derivată): | 0 – 1000 de secunde |
| Ramp Evaluare: | 0 – 200.0 BC/minut (0 – 360.0 BF/minut) |
| Locui: | 0 – 3600 minute |
| ON-OFF: | Cu histerezis reglabil (0-20% din SPAN) |
| Durata ciclului: | 0-120 de secunde |
| Acțiune de control: | Directă (pentru răcire) și inversă (pentru încălzire) |
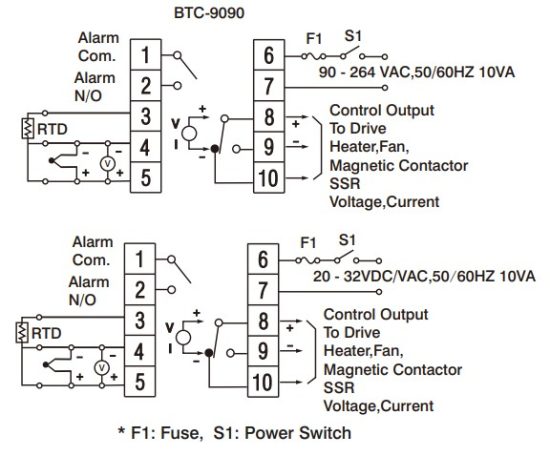
| PUTERE | 90-264 V CA, 50/60 Hz 10 VA 20-32VDC/VAC, 50/60Hz 10VA |
MEDIU ȘI FIZIC
| Siguranţă: | UL 61010-1, ediția a 3-a. CAN/CSA-C22.2 No. 61010-1(2012-05), Ediția a 3-a. |
| Emisia EMC: | EN50081-1 |
| Imunitate EMC: | EN50082-2 |
| Temperatura de functionare: | -10 până la 50 î.Hr. |
| Umiditate: | 0 până la 90% RH (fără codensare) |
| Izolare: | 20M ohmi min. (500 V CC) |
| Dărâma: | CA 2000V, 50/60 Hz, 1 minut |
| Vibrație: | 10 – 55 Hz, amplatitudine 1 mm |
| Şoc: | 200 m/s (20 g) |
| Greutate netă: | 170 de grame |
| Materiale pentru carcasă: | Plastic policarbonat |
| Altitudine: | Mai puțin de 2000 m |
| Utilizare în interior | |
| Overvoltage Categoria | II |
| Gradul de poluare: | 2 |
| Fluctuațiile tensiunii de intrare: | 10% din volumul nominaltage |
INSTALARE
6.1 DIMENSIUNI ȘI DECUPAREA PANELULUI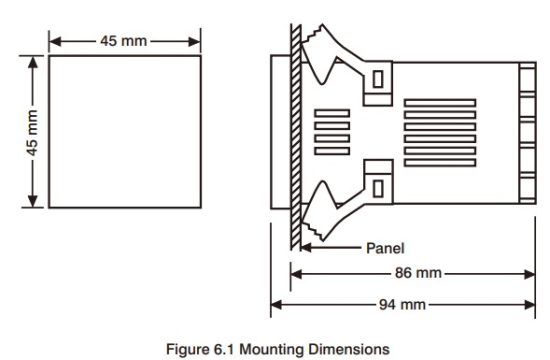 6.2 SCHEMA CABLARE
6.2 SCHEMA CABLARE
CALIBRARE
Nota: Nu continuați cu această secțiune decât dacă există o nevoie reală de a recalibra regulatorul. Toate datele de calibrare anterioare vor fi pierdute. Nu încercați recalibrarea decât dacă aveți la dispoziție echipamentul de calibrare adecvat. Dacă datele de calibrare se pierd, va trebui să returnați regulatorul furnizorului, care ar putea aplica o taxă pentru recalibrare.
Înainte de calibrare, asigurați-vă că toate setările parametrilor sunt corecte (tipul de intrare, C/F, rezoluția, intervalul inferior, intervalul superior).
- Deconectați firele de intrare ale senzorului și conectați un simulator de intrare standard de tipul corect la intrarea controlerului. Verificați polaritatea corectă. Setați semnalul simulat să coincidă cu semnalul de proces scăzut (de exemplu, zero grade).
- Folosiți tasta de derulare până când apare „
 „” apare pe afișajul PV. (Consultați 8.2)
„” apare pe afișajul PV. (Consultați 8.2) - Folosiți tastele sus și jos până când afișajul PV reprezintă intrarea simulată.
- Apăsați tasta Enter timp de cel puțin 6 secunde (maxim 16 secunde), apoi eliberați-o. Aceasta introduce valoarea inferioară de calibrare în memoria nevolatilă a controlerului.
- Apăsați și eliberați tasta de derulare.
 „” apare pe afișajul PV. Aceasta indică punctul de calibrare superior.
„” apare pe afișajul PV. Aceasta indică punctul de calibrare superior. - Măriți semnalul de intrare simulat pentru a coincide cu semnalul de proces de înaltă valoare (de exemplu, 11 de grade).
- Folosiți tastele sus și jos până când afișajul SV reprezintă intrarea înaltă simulată.
- Apăsați tasta Enter timp de cel puțin 6 secunde (maxim 16 secunde), apoi eliberați-o. Aceasta introduce valoarea superioară de calibrare în memoria nevolatilă a controlerului.
- Opriți unitatea, scoateți toate firele de testare și înlocuiți firele senzorului (respectând polaritatea).
OPERARE
8.1 FUNCȚIONAREA TASTATURII
* Cu alimentarea pornită, trebuie să aștepte 12 secunde pentru a memora noile valori ale parametrilor odată ce aceștia au fost modificați.
| TASTELE TACTILE | FUNCŢIE | DESCRIERE |
| Tasta de parcurgere | Avansați afișajul index în poziția dorită. Indexul avansează continuu și ciclic prin apăsarea acestei tastaturi. |
|
| Tasta Sus | Crește parametrul | |
| Tasta Jos | Reduce parametrul | |
| Cheie de returnare | Resetează controlerul la starea sa normală. De asemenea, oprește reglarea automată, procentul de ieșiretagmonitorizare și funcționare în mod manual. | |
| Presa |
Derulare lungă | Permite inspectarea sau modificarea mai multor parametri. |
| Presa |
Revenire lungă | 1. Execută funcția de reglare automată 2. Calibrează controlul când se află în nivelul de calibrare |
| Presa |
Ieșire Procenttage Monitor | Permite afișarea valorii de referință să indice valoarea ieșirii de control. |
| Presa |
Execuție în modul manual | Permite controlerului să intre în modul manual. |
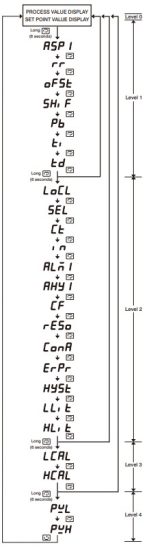
8.2 SCHEMĂ DE FLUX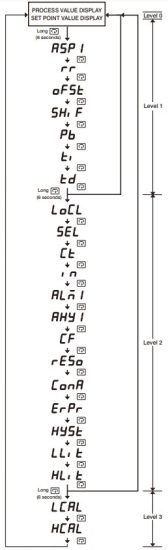 Tasta „Enter” poate fi apăsată oricând.
Tasta „Enter” poate fi apăsată oricând.
Aceasta va face ca afișajul să revină la valoarea de proces/valoarea punctului de setare.
Putere aplicată:
 Afișat timp de 4 secunde. (Versiunea software 3.6 sau o versiune ulterioară)
Afișat timp de 4 secunde. (Versiunea software 3.6 sau o versiune ulterioară) Test LED. Toate segmentele LED trebuie să fie aprinse timp de 4 secunde.
Test LED. Toate segmentele LED trebuie să fie aprinse timp de 4 secunde.- Valoarea de proces și punctul de referință indicate.
8.3 DESCRIEREA PARAMETRILOR
| COD INDEX | DESCRIERE INTERVAL DE REGLARE | **SETARE IMPLICITĂ** | ||
| SV | Controlul valorii punctului de referință *De la limita inferioară la valoarea limită superioară |
Nedefinit | ||
| Valoare punct de setare alarmă * Valoare limită inferioară până la limită superioarăue. if * 0 până la 3600 de minute (dacă * Limită inferioară mins punct de referință la limită înaltă minus valoarea punctului de referință (dacă |
200 î.Hr | |||
| Ramp Rată pentru valoarea de proces pentru a limita o schimbare bruscă a procesului (Soft Start) * 0 până la 200.0 BC (360.0 BF) / minut (dacă * 0 până la 3600 unități / minut (dacă |
0 BC / min. | |||
| Valoare offset pentru resetare manuală (dacă |
0.0 % | |||
| Deplasare offset pentru valoarea procesului * -111 î.Hr. până la 111 î.Hr. |
0 î.Hr | |||
| Banda proporțională
0 până la 200 BC (setat la 0 pentru control pornit-oprit) |
10 î.Hr | |||
| Timp de integrare (resetare) 0 până la 3600 secunde |
120 sec. | |||
| Derivată (Rată) Timp 0 până la 360.0 secunde |
30 sec. | |||
| Mod local 0: Niciun parametru de control nu poate fi modificat 1: Parametrii de control pot fi modificați |
1 | |||
| Selectarea parametrilor (permite selectarea unor parametri suplimentari accesibili la nivelul de securitate 0) |
0 | |||
| Timp de ciclu proporțional 0 până la 120 secunde |
Releu | 20 | ||
| Vol. pulsattage | 1 | |||
| Volți/mA liniari | 0 | |||
| Selectarea modului de intrare 0: Termocondensator tip J 6: Termocondensator tip S 1: Tip K T/C 7: Tip N T/C 2: Termometru tip T 8: PT100 DIN 3: Tip E T/C 9: PT100 JIS 4: Tip B T/C 10: Volum liniartage sau Curent 5: Tip R T/C Notă: T/C - Închidere spațiu de lipire G5, RTD - Deschidere G5 |
T/C | 0 | ||
| RTD | 8 | |||
| Liniar | 10 | |||
| Selectarea modului de alarmă 0: Alarmă maximă de proces 8: Alarmă în afara benzii 1: Alarmă de nivel scăzut al procesului 9: Alarmă în bandă 2: Alarmă de deviație maximă 10: Inhibare alarmă outband 3: Alarmă deviație joasă 11: Inhibare alarmă inband 4: Inhibare alarmă înaltă proces 12: Releu de alarmă OPRIT ca 5: Inhibare alarmă joasă proces Timp de așteptare 6: Inhibare alarmă deviație înaltă 13: Releu de alarmă activat ca 7: Inhibare alarmă deviație joasă Timp de așteptare expirare |
0 | |||
| Histerezisul alarmei 1 0 până la 20% din INTERVAL |
0.5% | |||
| Selecție BC / BF 0: BF, 1: BC |
1 | |||
| Selecția rezoluției 0: Fără virgulă 2: Zecimală cu 2 cifre 1: Zecimală cu 1 cifre 3: Zecimală cu 3 cifre (2 și 3 pot fi utilizate doar pentru volum liniartage sau curent |
0 |
|||
| Acțiune de control 0: Acțiune directă (răcire) 1: Acțiune inversă (încălzire) |
1 | |||
| Protecție împotriva erorilor 0: Control OPRIT, Alarmă OPRITĂ 2: Control PORNIT, Alarmă OPRITĂ 1: Control OPRIT, Alarmă PORNITĂ 3: Control PORNIT, Alarmă PORNITĂ |
1 |
|||
| Histerezis pentru controlul ON/OFF *0 până la 20% din INTERVAL |
0.5% | |||
| Limită inferioară a intervalului | -50 î.Hr. | |||
| Limită superioară a intervalului | 1000 î.Hr | |||
| Cifră de calibrare scăzută | 0 î.Hr | |||
| Cifră de calibrare înaltă | 800 î.Hr | |||
NOTE: * Interval de ajustare a parametrului
** Setări din fabrică. Alarmele de proces sunt la puncte de temperatură fixe. Alarmele de abatere se modifică odată cu valoarea punctelor de setare.
8.4 REGLARE AUTOMATĂ
- Asigurați-vă că controlerul este configurat și instalat corect.
- Asigurați-vă că banda proporțională „Pb” nu este setată la „0”.
- Apăsați tasta Enter timp de cel puțin 6 secunde (maxim 16 secunde). Aceasta inițializează funcția de reglare automată. (Pentru a abandona procedura de reglare automată, apăsați tasta Enter și eliberați-o).
- Virgula zecimală din colțul din dreapta jos al afișajului PV clipește pentru a indica faptul că reglarea automată este în desfășurare. Reglarea automată este completă când clipirea nu mai este activată.
- În funcție de procesul specific, reglarea automată poate dura până la două ore. Procesele cu întârzieri mari vor dura cel mai mult pentru a fi reglate. Rețineți că, în timp ce punctul de afișare clipește, regulatorul se auto-reglează.
NOTA: Dacă apare o eroare AT ( ![]() ), procesul de reglare automată este abandonat din cauza funcționării sistemului în control ON-OFF (PB=0).
), procesul de reglare automată este abandonat din cauza funcționării sistemului în control ON-OFF (PB=0).
Procesul va fi, de asemenea, abandonat dacă punctul de referință este setat aproape de temperatura procesului sau dacă există o capacitate insuficientă în sistem pentru a atinge punctul de referință (de exemplu, putere de încălzire disponibilă insuficientă). La finalizarea autoreglării, noile setări PID sunt introduse automat în memoria nevolatilă a regulatorului.
8.5 REGLAREA MANUALĂ A PID-ULUI
Deși funcția de reglare automată selectează setări de control care ar trebui să fie satisfăcătoare pentru majoritatea proceselor, este posibil să fie necesar să faceți ajustări ale acestor setări arbitrare din când în când. Acest lucru se poate întâmpla dacă se fac modificări la proces sau dacă doriți să „reglați fin” setările de control.
Este important ca, înainte de a modifica setările de control, să înregistrați setările curente pentru referințe ulterioare. Faceți mici modificări doar la o singură setare la un moment dat și observați rezultatele procesului. Deoarece fiecare setări interacționează între ele, este ușor să vă confundați cu rezultatele dacă nu sunteți familiarizat cu procedurile de control al procesului.
GHID DE TUNING
Banda proporțională
| Simptom | Soluţie |
| Răspuns lent | Reduceți valoarea PB |
| Depășiri mari sau oscilații | Creșteți valoarea PB |
Timp integral (Resetare)
| Simptom | Soluţie |
| Răspuns lent | Reduce timpul integral |
| Instabilitate sau oscilații | Creșterea timpului integral |
Timp (Rată) derivată
| Simptom | Soluţie |
| Răspuns lent sau oscilații | Reduce timpul de derivare |
| Depășire mare | Măriți timpul de derivare |
8.6 PROCEDURA DE REGLARE MANUALĂ
Pasul 1: Ajustați valorile integralei și derivatei la 0. Aceasta inhibă acțiunea de rată și resetare.
Pasul 2: Setați o valoare arbitrară a benzii proporționale și monitorizați rezultatele controlului
Pasul 3: Dacă setarea inițială introduce o oscilație mare a procesului, creșteți treptat banda proporțională până când apare o oscilație constantă. Înregistrați valoarea acestei benzi proporționale (Pc).
Pasul 4: Măsurați perioada ciclului constant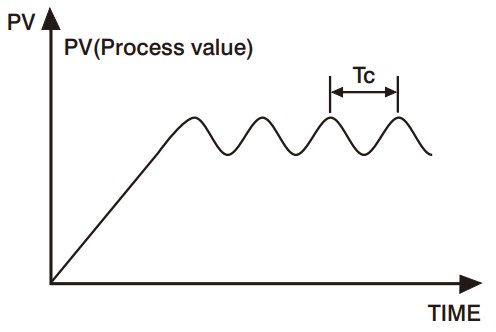 Înregistrați această valoare (Tc) în secunde
Înregistrați această valoare (Tc) în secunde
Pasul 5: Setările de control sunt determinate după cum urmează:
Banda de proporție (PB) = 1.7 Pc
Timpul de integrare (TI) = 0.5 Tc
Timpul derivat (TD) = 0.125 Tc
8.7 RAMP & LOCUINȚĂ
Controlerul BTC-9090 poate fi configurat să acționeze fie ca un controler cu punct de referință fix, fie ca un singur regulator.amp controler la pornire. Această funcție permite utilizatorului să seteze o valoare predeterminată a ramp rată pentru a permite procesului să atingă treptat temperatura setată, rezultând astfel o funcție de „Pornire ușoară”.
Un temporizator de temporizare este încorporat în BTC-9090, iar releul de alarmă poate fi configurat să ofere fie o funcție de temporizare care să fie utilizată împreună cu ramp funcţie.
ramp rata este determinată de ' ![]() „parametru care poate fi ajustat în intervalul 0 - 200.0 BC/minut. Parametrul r”amp Funcția de rată este dezactivată când '
„parametru care poate fi ajustat în intervalul 0 - 200.0 BC/minut. Parametrul r”amp Funcția de rată este dezactivată când ' ![]() Parametrul ' este setat la ' 0 '.
Parametrul ' este setat la ' 0 '.
Funcția de stagnare este activată prin configurarea ieșirii de alarmă să acționeze ca un temporizator de staționare. Parametrul ![]() trebuie setat la valoarea 12. Contactul de alarmă va funcționa acum ca un contact cu temporizator, contactul fiind închis la pornire și deschizându-se după timpul scurs setat la parametrul
trebuie setat la valoarea 12. Contactul de alarmă va funcționa acum ca un contact cu temporizator, contactul fiind închis la pornire și deschizându-se după timpul scurs setat la parametrul![]() .
.
Dacă sursa de alimentare sau ieșirea controlerului este conectată prin contactul de alarmă, controlerul va funcționa ca un controler cu impregnare garantată.
În exampsub Ramp Rata este setată la 5 BC/minut, ![]() = 12 și
= 12 și ![]() =15 (minute). Se aplică alimentarea la momentul zero, iar procesul urcă cu 5 BC/minut până la punctul de referință de 125 BC. La atingerea punctului de referință, temporizatorul de staționare este activat, iar după timpul de stagnare de 15 minute, contactul de alarmă se va deschide, deconectând ieșirea. Temperatura procesului va scădea în cele din urmă cu o rată nedeterminată.
=15 (minute). Se aplică alimentarea la momentul zero, iar procesul urcă cu 5 BC/minut până la punctul de referință de 125 BC. La atingerea punctului de referință, temporizatorul de staționare este activat, iar după timpul de stagnare de 15 minute, contactul de alarmă se va deschide, deconectând ieșirea. Temperatura procesului va scădea în cele din urmă cu o rată nedeterminată.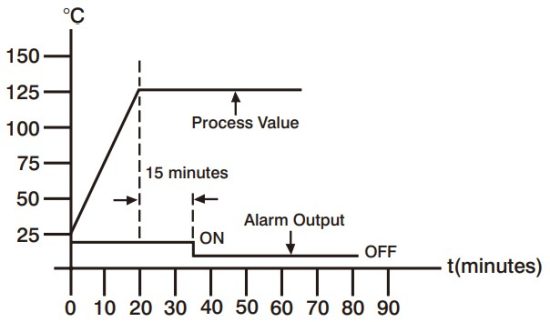 Funcția de pauză poate fi utilizată pentru a acționa un dispozitiv extern, cum ar fi o sirenă, pentru a alerta atunci când s-a atins un timp de impregnare.
Funcția de pauză poate fi utilizată pentru a acționa un dispozitiv extern, cum ar fi o sirenă, pentru a alerta atunci când s-a atins un timp de impregnare.
trebuie setată la valoarea 13. Contactul de alarmă va funcționa acum ca un contact de temporizator, contactul fiind deschis la pornirea inițială. Temporizatorul începe numărătoarea inversă odată ce temperatura setată este atinsă. După expirarea valorii setate, contactul de alarmă se închide.
MESAJE DE EROARE
| Simptom | Cauză (cauze) | Soluție (soluții) |
| Eroare de rupere a senzorului | Înlocuiți RTD-ul sau senzorul Utilizați modul de funcționare manual |
|
| Afișajul procesului dincolo de valoarea de referință inferioară a intervalului | Reajustați valoarea | |
| Afișajul procesului dincolo de valoarea de referință superioară a intervalului | Reajustați valoarea | |
| Deteriorarea modulului hibrid analogic | Înlocuiți modulul. Verificați dacă există surse externe de deteriorare, cum ar fi tensiunea tranzitorie.tage vârfuri | |
| Funcționare incorectă a procedurii de reglare automată. Banda prop. setată la 0. | Repetați procedura. Măriți banda prop. la un număr mai mare decât 0. | |
| Modul manual nu este permis pentru un sistem de control ON-OFF | Măriți banda proporțională | |
| Eroare de verificare a sumei, valorile din memorie s-ar fi putut modifica accidental | Verificarea și reconfigurarea parametrilor de control |
Instrucțiuni suplimentare pentru noua versiune
Unitatea cu versiunea de firmware V3.7 are doi parametri suplimentari – „PVL” și „PVH”, situați în diagrama de flux a parametrilor de nivel 4 în partea stângă.
Când trebuie să modificați valoarea LLit la o valoare mai mare sau să modificați valoarea HLit la o valoare mai mică, trebuie urmate următoarele proceduri pentru ca valoarea PVL să fie echivalentă cu o zecime din valoarea LCAL și valoarea PVH să fie echivalentă cu o zecime din valoarea HCAL. În caz contrar, valorile măsurate în proces vor fi în afara specificațiilor.
- Folosiți tasta de derulare până când pe afișajul PV apare „LLit”. Folosiți tastele sus și jos pentru a seta valoarea LLit la o valoare mai mare decât valoarea inițială.
- Apăsați și eliberați tasta de derulare, apoi pe afișajul PV apare „HLit”. Folosiți tastele sus și jos pentru a seta valoarea HLit la o valoare mai mică decât valoarea inițială.
- Opriți și porniți alimentarea.
- Folosiți tasta de derulare până când pe afișajul PV apare „LCAL”. Notați valoarea LCAL.
- Apăsați și eliberați tasta de derulare, apoi pe afișajul PV apare „HCAL”. Notați valoarea HCAL.
- Apăsați tasta de derulare timp de cel puțin 6 secunde, apoi eliberați-o; pe afișajul PV apare „PVL”. Folosiți tastele SUS și Jos pentru a seta valoarea PVL la o zecime din valoarea LCAL.
- Apăsați și eliberați tasta de derulare, pe afișajul PV apare „PVH”. Folosiți tastele SUS și Jos pentru a seta valoarea PVH la o zecime din valoarea HCAL.
-Vă rugăm să instalați un întrerupător de circuit de 20A la capătul sursei de alimentare
-Pentru a îndepărta praful, folosiți o cârpă uscată
-Instalarea, în cadrul căreia siguranța oricărui sistem care încorporează echipamentul este responsabilitatea asamblorului sistemului
- Dacă echipamentul este utilizat într-un mod nespecificat de producător, protecția oferită de echipament poate fi afectată
Nu acoperiți orificiile de ventilație pentru a menține circulația aerului.
Aveți grijă să nu strângeți prea tare șuruburile terminalelor. Cuplul nu trebuie să depășească 1 Nm (14 Lb-in sau 10 KgF-cm), temperatură minimă 11.52°C, utilizați numai conductori din cupru.
Cu excepția cablajului termocuplului, toate cablurile trebuie să utilizeze conductor de cupru torsadat cu calibrul maxim 18 AWG.
GARANȚIE
Brainchild Electronic Co., Ltd. are plăcerea să ofere sugestii privind utilizarea diverselor sale produse.
Cu toate acestea, Brainchild nu oferă nicio garanție sau declarație de niciun fel cu privire la adecvarea pentru utilizare sau la aplicarea produselor sale de către Cumpărător. Selecția, aplicarea sau utilizarea produselor Brainchild este responsabilitatea Cumpărătorului. Nu se vor accepta reclamații pentru daune sau pierderi, fie ele directe, indirecte, incidentale, speciale sau consecutive. Specificațiile pot fi modificate fără notificare prealabilă. În plus, Brainchild își rezervă dreptul de a efectua modificări - fără notificarea Cumpărătorului - ale materialelor sau proceselor care nu afectează conformitatea cu nicio specificație aplicabilă. Produsele Brainchild sunt garantate ca fiind fără defecte de material și de manoperă timp de 18 luni de la livrarea către primul cumpărător pentru utilizare. O perioadă extinsă este disponibilă cu costuri suplimentare, la cerere. Responsabilitatea exclusivă a Brainchild în cadrul acestei garanții, la alegerea Brainchild, este limitată la înlocuire sau reparare, gratuită, sau la rambursarea prețului de achiziție în perioada de garanție specificată. Această garanție nu se aplică daunelor rezultate din transport, modificare, utilizare necorespunzătoare sau abuz.
RETURNARE
Niciun retur de produs nu poate fi acceptat fără un formular de Autorizare a Returnării Materialelor (RMA) completat.
NOTA:
Informațiile din acest manual de utilizare pot fi modificate fără notificare prealabilă.
Drepturi de autor © 2023, The Brainchild Electronic Co., Ltd., toate drepturile rezervate. Nicio parte a acestei publicații nu poate fi reprodusă, transmisă, transcrisă sau stocată într-un sistem de recuperare a datelor sau tradusă în nicio limbă, sub nicio formă și prin niciun mijloc, fără permisiunea scrisă a Brainchild Electronic Co., Ltd.
![]() Pentru orice nevoie de reparații sau întreținere, vă rugăm să ne contactați.
Pentru orice nevoie de reparații sau întreținere, vă rugăm să ne contactați.
Electronic Co., Ltd.
Nr.209, Chung Yang Rd., Nan Kang Dist.,
Taipei 11573, Taiwan
Tel: 886-2-27861299
Fax: 886-2-27861395
web site: http://www.brainchildtw.com![]()
Documente/Resurse
 |
Controler bazat pe microprocesor cu logică fuzzy BrainChild BTC-9090 [pdfManual de instrucțiuni BTC-9090, BTC-9090 G UL, BTC-9090 Controler bazat pe microprocesor Fuzzy Logic, Controler bazat pe microprocesor Fuzzy Logic, Controler bazat pe microprocesor, Controler bazat pe procesor, Controler bazat pe |