![]() BTC-9090 Pengawal Berasaskan Pemproses Mikro Logik Fuzzy
BTC-9090 Pengawal Berasaskan Pemproses Mikro Logik Fuzzy
Manual Arahan
PENGENALAN
Manual ini mengandungi maklumat untuk pemasangan dan pengendalian model Brainchild BTC-9090 Fuzzy Logic pengawal berasaskan mikro-pemproses.
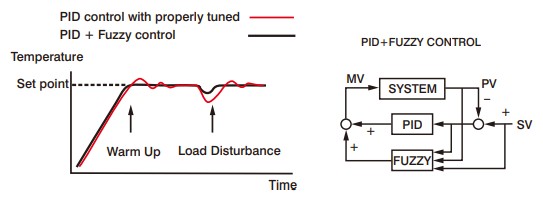
Logik Fuzzy adalah ciri penting pengawal serba boleh ini. Walaupun kawalan PID telah diterima secara meluas oleh industri, namun adalah sukar untuk kawalan PID berfungsi dengan beberapa sistem canggih dengan cekap, contohnyaampsistem tertib kedua, selang masa yang lama, pelbagai titik set, pelbagai beban, dsb. Kerana disadvantage tentang prinsip kawalan dan nilai tetap kawalan PID, adalah tidak cekap untuk mengawal sistem dengan banyak jenis, dan hasilnya jelas mengecewakan bagi sesetengah sistem. Kawalan Logik Fuzzy dan mengatasi kelemahantage kawalan PID, ia mengawal sistem dengan cara yang cekap melalui pengalaman yang pernah dialaminya sebelum ini. Fungsi Fuzzy Logic adalah untuk melaraskan nilai PID secara tidak langsung untuk menjadikan nilai output manipulasi MV melaras secara fleksibel dan cepat menyesuaikan diri dengan pelbagai proses. Dengan cara ini, ia membolehkan proses mencapai titik set yang telah ditetapkan dalam masa yang paling singkat dengan overshoot minimum semasa penalaan atau gangguan luaran. Berbeza daripada kawalan PID dengan maklumat digital, Fuzzy Logic ialah kawalan dengan maklumat bahasa.
Selain itu, instrumen ini mempunyai fungsi s tunggaltagehamp dan dwell, auto-tunung dan pelaksanaan mod manual. Kemudahan penggunaan juga merupakan ciri penting dengannya.
SISTEM NUMERASI
Model No. ![]() (1) Input Kuasa
(1) Input Kuasa
| 4 | 90-264VAC |
| 5 | 20-32VAC/VDC |
| 9 | Lain-lain |
(2) Input Isyarat
1 0 – 5V 3 PT100 DIN 5 TC 7 0 – 20mA 8 0 – 10V
(3) Kod Julat
| 1 | Boleh dikonfigurasikan |
| 9 | Lain-lain |
(4) Mod Kawalan
| 3 | Kawalan PID / ON-OFF |
(5) Output 1 Pilihan
| 0 | tiada |
| 1 | Relay diberi nilai rintangan 2A/240VAC |
| 2 | Pemacu SSR diberi nilai 20mA/24V |
| 3 | 4-20mA linear, maks. memuatkan 500 ohm (Modul OM93-1) |
| 4 | 0-20mA linear, maks. memuatkan 500 ohm (Modul OM93-2) |
| 5 | 0-10V linear, min. impedans 500K ohm (Modul OM93-3) |
| 9 | Lain-lain |
(6) Output 2 Pilihan
| 0 | tiada |
(7) Pilihan Penggera
| 0 | tiada |
| 1 | Relay diberi nilai rintangan 2A/240VAC |
| 9 | Lain-lain |
(8) Komunikasi
| 0 | tiada |
HURAIAN PANEL DEPAN
 Julat INPUT & KETEPATAN
Julat INPUT & KETEPATAN
| IN | Sensor | Jenis Input | Julat (SM) | Ketepatan |
| 0 | J | Besi-Constantan | -50 hingga 999 SM | A2 SM |
| 1 | K | Chromel-Alumel | -50 hingga 1370 SM | A2 SM |
| 2 | T | Tembaga-Constantan | -270 hingga 400 SM | A2 SM |
| 3 | E | Chromel-Constantan | -50 hingga 750 SM | A2 SM |
| 4 | B | Pt30%RH/Pt6%RH | 300 hingga 1800 SM | A3 SM |
| 5 | R | Pt13%RH/Pt | 0 hingga 1750 SM | A2 SM |
| 6 | S | Pt10%RH/Pt | 0 hingga 1750 SM | A2 SM |
| 7 | N | Nikrosil-Nisil | -50 hingga 1300 SM | A2 SM |
| 8 | RTD | PT100 ohm(DIN) | -200 hingga 400 SM | A0.4 SM |
| 9 | RTD | PT100 ohm(JIS) | -200 hingga 400 SM | A0.4 SM |
| 10 | Linear | -10mV hingga 60mV | -1999 hingga 9999 | A0.05% |
SPESIFIKASI
INPUT
| Termokopel (T/C): | jenis J, K, T, E, B, R, S, N. |
| RTD: | PT100 ohm RTD (DIN 43760/BS1904 atau JIS) |
| Linear: | -10 hingga 60 mV, pengecilan input boleh dikonfigurasikan |
| Julat: | Boleh dikonfigurasikan pengguna, rujuk Jadual di atas |
| Ketepatan: | Rujuk Jadual di atas |
| Pampasan Cold Junction: | 0.1 BC/ BC biasa ambien |
| Perlindungan Pecah Sensor: | Mod perlindungan boleh dikonfigurasikan |
| Rintangan Luaran: | 100 ohm maks. |
| Penolakan Mod Biasa: | 60 dB |
| Penolakan Mod Biasa: | 120dB |
| Sampkadar le: | 3 kali / saat |
KAWALAN
| Band Perkadaran: | 0 – 200 SM ( 0-360BF) |
| Tetapkan Semula ( Integral ): | 0 – 3600 saat |
| Kadar ( Derivatif ): | 0 – 1000 saat |
| Ramp Kadar: | 0 – 200.0 SM /minit (0 – 360.0 BF /minit) |
| Tinggal: | 0 – 3600 minit |
| HIDUP-MATI: | Dengan histerisis boleh laras (0-20% daripada SPAN) |
| Masa Kitaran: | 0-120 saat |
| Tindakan Kawalan: | Terus (untuk penyejukan) dan sebaliknya (untuk pemanasan) |
| KUASA | 90-264VAC, 50/ 60Hz 10VA 20-32VDC/VAC, 50/60Hz 10VA |
PERSEKITARAN & FIZIKAL
| Keselamatan: | UL 61010-1, Edisi Ke-3. CAN/CSA-C22.2 No. 61010-1(2012-05), Edisi ke-3. |
| Pelepasan EMC: | EN50081-1 |
| Kekebalan EMC: | EN50082-2 |
| Suhu Operasi: | -10 hingga 50 SM |
| Kelembapan: | 0 hingga 90 % RH (bukan pengekodan) |
| Penebat: | 20M ohm min. ( 500 VDC ) |
| Pecahan: | AC 2000V, 50/60 Hz, 1 minit |
| Getaran: | 10 – 55 Hz, amplintang 1 mm |
| Kejutan: | 200 m/s ( 20g ) |
| Berat Bersih: | 170 gram |
| Bahan Perumahan: | Plastik Polikarbonat |
| Ketinggian: | Kurang daripada 2000 m |
| Penggunaan Dalaman | |
| Overvoltage Kategori | II |
| Ijazah Pencemaran: | 2 |
| Turun naik Volta Input Kuasa: | 10% daripada voltage |
PEMASANGAN
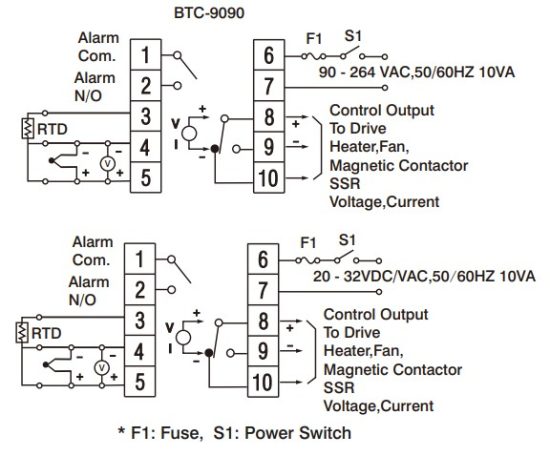
6.1 DIMENSI & CUTOUT PANEL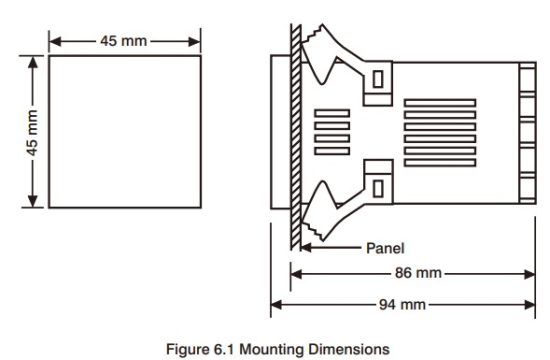 6.2 GAMBARAJAH PENDAWAIAN
6.2 GAMBARAJAH PENDAWAIAN
PENGESAHAN
Nota: Jangan teruskan melalui bahagian ini melainkan mereka adalah keperluan tulen untuk menentukur semula pengawal. Semua tarikh penentukuran sebelumnya akan hilang. Jangan cuba penentukuran semula melainkan anda mempunyai peralatan penentukuran yang sesuai. Jika data penentukuran hilang, anda perlu mengembalikan pengawal kepada pembekal anda yang mungkin mengenakan caj untuk penentukuran semula.
Sebelum penentukuran pastikan semua tetapan parameter adalah betul (jenis input, C / F, resolusi, julat rendah, julat tinggi).
- Tanggalkan pendawaian input sensor dan sambungkan simulator input standard jenis yang betul kepada input pengawal. Sahkan kekutuban yang betul. Tetapkan isyarat simulasi untuk bertepatan dengan isyarat proses rendah (cth sifar darjah).
- Gunakan Kekunci Tatal sehingga ”
 ” muncul pada Paparan PV. (Rujuk 8.2)
” muncul pada Paparan PV. (Rujuk 8.2) - Gunakan Kekunci Atas dan Bawah sehingga Paparan PV mewakili input simulasi.
- Tekan Kekunci Kembali selama sekurang-kurangnya 6 saat (maksimum 16 saat), kemudian lepaskan. Ini memasukkan angka penentukuran rendah ke dalam memori tidak menentu pengawal.
- Tekan dan lepaskan Kekunci Tatal. ”
 ” muncul pada Paparan PV. Ini menunjukkan titik penentukuran tinggi.
” muncul pada Paparan PV. Ini menunjukkan titik penentukuran tinggi. - Tingkatkan isyarat input simulasi agar bertepatan dengan isyarat 11proses tinggi (cth 100 darjah).
- Gunakan Kekunci Atas dan Bawah sehingga Paparan SV mewakili input tinggi yang disimulasikan.
- Tekan Kekunci Return selama sekurang-kurangnya 6 saat (maksimum 16 saat), kemudian lepaskan. Ini memasukkan angka penentukuran tinggi ke dalam memori tidak menentu pengawal.
- Matikan kuasa unit, keluarkan semua pendawaian ujian dan gantikan pendawaian sensor (memerhatikan kekutuban).
OPERASI
8.1 OPERASI PAPAN KEkunci
* Dengan kuasa dihidupkan, ia perlu menunggu selama 12 saat untuk menghafal nilai baharu parameter sebaik sahaja ia ditukar.
| KUNCI SENTUH | FUNGSI | PENERANGAN |
| Kekunci Tatal | Majukan paparan indeks ke kedudukan yang dikehendaki. Indeks maju secara berterusan dan kitaran dengan menekan pad kekunci ini. |
|
| Kekunci Naik | Meningkatkan parameter | |
| Kekunci Turun | Mengurangkan parameter | |
| Kembalikan Kunci | Menetapkan semula pengawal kepada status normalnya. Juga menghentikan penalaan automatik, peratusan keluarantage pemantauan dan operasi mod manual. | |
| Tekan |
Tatal Panjang | Membenarkan lebih banyak parameter diperiksa atau diubah. |
| Tekan |
Pulangan Panjang | 1. Melaksanakan fungsi penalaan automatik 2. Menentukur kawalan apabila dalam tahap penentukuran |
| Tekan |
Peratusan Keluarantage Pantau | Membenarkan paparan titik set untuk menunjukkan nilai output kawalan. |
| Tekan |
Pelaksanaan Mod Manual | Membenarkan pengawal memasuki mod manual. |
8.2 CARTA ALIRAN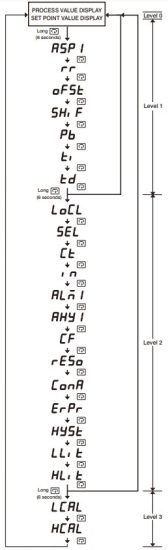 Kekunci "kembali" boleh ditekan pada bila-bila masa.
Kekunci "kembali" boleh ditekan pada bila-bila masa.
Ini akan menggesa paparan untuk kembali kepada nilai Proses/Nilai mata Tetap.
Kuasa Digunakan:
 Dipaparkan selama 4 saat. (Perisian Versi 3.6 atau lebih tinggi)
Dipaparkan selama 4 saat. (Perisian Versi 3.6 atau lebih tinggi) ujian LED. Semua segmen LED mesti dinyalakan selama 4 saat.
ujian LED. Semua segmen LED mesti dinyalakan selama 4 saat.- Nilai proses dan titik set ditunjukkan.
8.3 PENERANGAN PARAMETER
| KOD INDEKS | Julat PELARASAN PENERANGAN | ** TETAPAN LALAI | ||
| SV | Kawalan Nilai titik tetapan *Had Rendah hingga Nilai Had Tinggi |
Tidak ditentukan | ||
| Nilai titik set penggera * Had Rendah kepada Val Had Tinggiue. if * 0 hingga 3600 minit (jika * Had Rendah mins titik tetapkan kepada tinggi Had tolak nilai titik set ( jika |
200 SM | |||
| Ramp Kadar untuk nilai proses untuk mengehadkan perubahan mendadak proses (Soft Start) * 0 hingga 200.0 SM (360.0 BF) / minit ( jika * 0 hingga 3600 unit / minit ( jika |
0 SM / min. | |||
| Nilai Offset untuk Set Semula Manual ( jika |
0.0 % | |||
| Anjakan mengimbangi untuk nilai proses * -111 SM hingga 111 SM |
0 SM | |||
| Jalur Berkadar
* 0 hingga 200 SM ( set kepada 0 untuk kawalan on-off) |
10 SM | |||
| Masa Kamiran (Tetap Semula). * 0 hingga 3600 saat |
120 saat. | |||
| Masa Terbitan (Kadar). * 0 hingga 360.0 saat |
30 saat. | |||
| Mod tempatan 0: Tiada parameter kawalan boleh ditukar 1: Parameter kawalan boleh ditukar |
1 | |||
| Pemilihan Parameter ( membenarkan pemilihan parameter tambahan boleh diakses pada tahap keselamatan 0) |
0 | |||
| Masa Kitaran Berkadar * 0 hingga 120 saat |
Relay | 20 | ||
| Pulsed Voltage | 1 | |||
| Volt Linear/mA | 0 | |||
| Pemilihan Mod Input 0: T/C jenis J 6: T/C jenis S 1: T/C jenis K 7: T/C jenis N 2: T jenis T/C 8: PT100 DIN 3: E jenis T/C 9: PT100 JIS 4: B jenis T/C 10: Linear Voltage atau Semasa 5: T/C jenis R Nota: T/C-Tutup celah pateri G5, RTD-Buka G5 |
T/C | 0 | ||
| RTD | 8 | |||
| Linear | 10 | |||
| Pemilihan Mod Penggera 0: Proses Penggera Tinggi 8: Penggera Jalur Luar 1: Proses Penggera Rendah 9: Penggera dalam 2: Sisihan Penggera Tinggi 10: Menghalang Penggera Jalur Luar 3: Penggera Rendah Sisihan 11: Menghalang Penggera Dalam Jalur 4: Menghalang Proses Penggera Tinggi 12: Geganti Penggera MATI sebagai 5: Menghalang Proses Penggera Rendah Dwell Time Out 6: Halang Sisihan Penggera Tinggi 13: Geganti Penggera HIDUP sebagai 7: Halang Sisihan Penggera Rendah Masa Dwell Out |
0 | |||
| Histeresis Penggera 1 * 0 hingga 20% daripada SPAN |
0.5% | |||
| Pemilihan BC / BF 0: BF, 1: BC |
1 | |||
| Pemilihan Resolusi 0: Tiada Titik Perpuluhan 2: 2 Digit Perpuluhan 1: 1 Digit Perpuluhan 3: 3 Digit Perpuluhan (2 & 3 hanya boleh digunakan untuk voltage atau semasa |
0 |
|||
| Tindakan Kawalan 0: Tindakan Terus (Penyejukan) 1: Tindakan Songsang (Haba). |
1 | |||
| Perlindungan Ralat 0: Kawalan MATI, Penggera MATI 2: Kawalan HIDUP , Penggera MATI 1: Kawalan MATI, Penggera HIDUP 3: Kawalan HIDUP, Penggera HIDUP |
1 |
|||
| Histeresis untuk Kawalan ON/OFF *0 hingga 20 % daripada SPAN |
0.5% | |||
| Had Julat Rendah | -50 SM | |||
| Had Julat Tinggi | 1000 SM | |||
| Angka Penentukuran Rendah | 0 SM | |||
| Angka Penentukuran Tinggi | 800 SM | |||
NOTA: * Melaraskan Julat Parameter
** Tetapan kilang. Penggera proses berada pada titik suhu tetap. Penggera sisihan bergerak dengan nilai mata yang ditetapkan.
8.4 PENALA AUTOMATIK
- Pastikan pengawal dikonfigurasikan dan dipasang dengan betul.
- Pastikan Jalur Berkadar 'Pb' tidak ditetapkan pada '0'.
- Tekan Kekunci Return selama sekurang-kurangnya 6 saat (maksimum 16 saat). Ini memulakan fungsi Autotala. (Untuk membatalkan prosedur auto-tala tekan Return Key dan lepaskan).
- Titik Perpuluhan di sudut kanan bawah paparan PV berkelip untuk menunjukkan Autotala sedang dijalankan. Autotala selesai apabila berkelip berhenti.
- Bergantung pada proses tertentu, penalaan automatik mungkin mengambil masa sehingga dua jam. Proses dengan ketinggalan masa yang lama akan mengambil masa yang paling lama untuk ditala. Ingat, semasa titik paparan berkelip pengawal sedang auto-tala.
NOTA: Jika ralat AT( ![]() ) berlaku, proses penalaan automatik dibatalkan kerana sistem beroperasi dalam kawalan ON-OFF(PB=0).
) berlaku, proses penalaan automatik dibatalkan kerana sistem beroperasi dalam kawalan ON-OFF(PB=0).
Proses ini juga akan dibatalkan jika titik set ditetapkan untuk menghampiri suhu proses atau jika kapasiti tidak mencukupi dalam sistem untuk mencapai titik set (cth. kuasa pemanasan tidak mencukupi tersedia). Setelah selesai Autotala, tetapan PID baharu dimasukkan secara automatik ke dalam memori tidak meruap pengawal
8.5 PELARASAN PID MANUAL
Walaupun fungsi auto-tala memilih tetapan kawalan yang sepatutnya terbukti memuaskan untuk kebanyakan proses, anda mungkin mendapati perlu untuk membuat pelarasan pada tetapan sewenang-wenang ini dari semasa ke semasa. Ini mungkin berlaku jika beberapa perubahan dibuat pada proses atau jika anda ingin 'memperhalusi' tetapan kawalan.
Adalah penting sebelum membuat perubahan pada tetapan kawalan, anda merekodkan tetapan semasa untuk rujukan masa hadapan. Buat sedikit perubahan kepada hanya satu tetapan pada satu masa dan perhatikan keputusan pada proses tersebut. Kerana setiap tetapan berinteraksi antara satu sama lain, adalah mudah untuk menjadi keliru dengan keputusan jika anda tidak biasa dengan prosedur kawalan proses.
PANDUAN TALA
Jalur Berkadar
| simptom | Penyelesaian |
| Respons Lambat | Kurangkan Nilai PB |
| Overshoot atau Ayunan Tinggi | Tingkatkan Nilai PB |
Masa Integral (Tetapkan Semula)
| simptom | Penyelesaian |
| Respons Lambat | Kurangkan Masa Kamiran |
| Ketidakstabilan atau Ayunan | Meningkatkan Masa Kamiran |
Masa Terbitan (Kadar)
| simptom | Penyelesaian |
| Tindak Balas Perlahan atau Ayunan | Kurangkan Deriv. Masa |
| Overshoot Tinggi | Tingkatkan Deriv. Masa |
8.6 PROSEDUR TALA MANUAL
Langkah 1: Laraskan nilai kamiran dan terbitan kepada 0. Ini menghalang tindakan kadar dan set semula
Langkah 2: Tetapkan nilai arbitrari jalur berkadar dan pantau keputusan kawalan
Langkah 3: Jika tetapan asal memperkenalkan ayunan proses yang besar, kemudian tingkatkan jalur berkadar secara beransur-ansur sehingga kitaran mantap berlaku. Catatkan nilai jalur berkadar ini (Pc).
Langkah 4: Ukur tempoh kayuhan mantap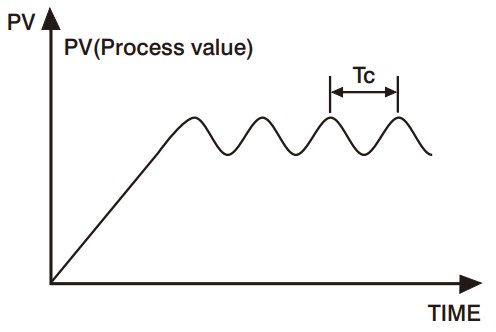 Catatkan nilai ini (Tc) dalam saat
Catatkan nilai ini (Tc) dalam saat
Langkah 5: Tetapan Kawalan ditentukan seperti berikut:
Jalur Perkadaran(PB)=1.7 Pc
Masa Kamiran (TI)=0.5 Tc
Masa Terbitan(TD)=0.125 Tc
8.7 RAMP & TINGGAL
Pengawal BTC-9090 boleh dikonfigurasikan untuk bertindak sebagai pengawal titik set tetap atau sebagai satu ramp pengawal semasa menghidupkan kuasa. Fungsi ini membolehkan pengguna menetapkan r yang telah ditetapkanamp kadar untuk membolehkan proses mencapai suhu titik set secara beransur-ansur, sekali gus menghasilkan fungsi 'Soft Start'.
Pemasa tinggal dimasukkan dalam BTC-9090 dan geganti penggera boleh dikonfigurasikan untuk menyediakan sama ada fungsi tinggal untuk digunakan bersama dengan ramp fungsi.
ramp kadar ditentukan oleh ' ![]() ' parameter yang boleh dilaraskan dalam julat 0 hingga 200.0 SM/minit. ramp fungsi kadar dilumpuhkan apabila '
' parameter yang boleh dilaraskan dalam julat 0 hingga 200.0 SM/minit. ramp fungsi kadar dilumpuhkan apabila ' ![]() ' parameter ditetapkan kepada ' 0 '.
' parameter ditetapkan kepada ' 0 '.
Fungsi rendam didayakan dengan mengkonfigurasi output penggera untuk bertindak sebagai pemasa tinggal. Parameter ![]() perlu ditetapkan kepada nilai 12. Sesentuh penggera kini akan beroperasi sebagai sesentuh pemasa, dengan sesentuh ditutup semasa dihidupkan dan dibuka selepas masa berlalu ditetapkan pada parameter
perlu ditetapkan kepada nilai 12. Sesentuh penggera kini akan beroperasi sebagai sesentuh pemasa, dengan sesentuh ditutup semasa dihidupkan dan dibuka selepas masa berlalu ditetapkan pada parameter![]() .
.
Jika bekalan atau output kuasa pengawal disambungkan melalui sesentuh penggera, pengawal akan beroperasi sebagai pengawal rendam terjamin.
Dalam bekasample di bawah Ramp Kadar ditetapkan kepada 5 SM/minit, ![]() = 12 dan
= 12 dan ![]() =15 (minit). Kuasa digunakan pada masa sifar dan proses naik pada 5 SM/minit ke titik set 125 SM. Apabila mencapai titik set, pemasa tinggal diaktifkan dan selepas masa rendam selama 15 minit, sesentuh penggera akan terbuka, mematikan output. Suhu proses akhirnya akan jatuh pada kadar yang tidak ditentukan.
=15 (minit). Kuasa digunakan pada masa sifar dan proses naik pada 5 SM/minit ke titik set 125 SM. Apabila mencapai titik set, pemasa tinggal diaktifkan dan selepas masa rendam selama 15 minit, sesentuh penggera akan terbuka, mematikan output. Suhu proses akhirnya akan jatuh pada kadar yang tidak ditentukan.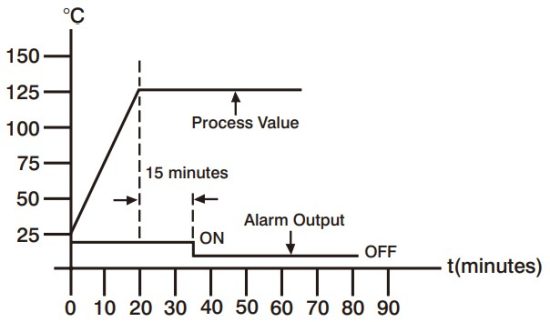 Fungsi dwell boleh digunakan untuk mengendalikan peranti luaran seperti siren untuk memberi amaran apabila masa rendam telah dicapai.
Fungsi dwell boleh digunakan untuk mengendalikan peranti luaran seperti siren untuk memberi amaran apabila masa rendam telah dicapai.
perlu ditetapkan kepada nilai 13. Kenalan penggera kini akan beroperasi sebagai kenalan pemasa, dengan kenalan dibuka pada permulaan permulaan. Pemasa mula mengira detik apabila suhu titik set dicapai. Selepas tetapan di telah berlalu, kenalan penggera ditutup.
MESEJ RALAT
| simptom | Punca (s) | Penyelesaian |
| Ralat pecah sensor | Gantikan RTD atau penderia Gunakan operasi mod manual |
|
| Paparan proses melebihi titik set julat rendah | Laraskan semula nilai | |
| Paparan proses melebihi titik set julat tinggi | Laraskan semula nilai | |
| Kerosakan modul hibrid analog | Gantikan modul. Semak sumber kerosakan luar seperti vol sementaratage pancang | |
| Pengendalian prosedur penalaan automatik yang salah Band Prop ditetapkan kepada 0 | Ulangi prosedur. Tingkatkan Jalur Prop. kepada nombor yang lebih besar daripada 0 | |
| Mod manual tidak dibenarkan untuk sistem kawalan ON-OFF | Tingkatkan jalur berkadar | |
| Semak ralat jumlah, nilai dalam ingatan mungkin telah berubah secara tidak sengaja | Semak dan konfigurasi semula parameter kawalan |
Arahan Tambahan untuk Versi Baharu
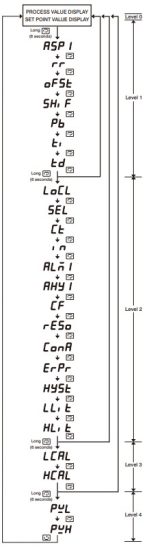
Unit dengan versi perisian tegar V3.7 mempunyai dua parameter tambahan - "PVL" dan "PVH" yang terletak di tahap 4 sebagai carta alir parameter di sebelah kiri.
Apabila anda perlu menukar nilai LLit kepada nilai yang lebih tinggi atau menukar nilai HLit kepada nilai yang lebih rendah, prosedur berikut perlu diikuti untuk menjadikan nilai PVL bersamaan dengan satu persepuluh nilai LCAL dan alue PVH bersamaan dengan satu persepuluh nilai HCAL. Jika tidak, nilai proses yang diukur akan terkeluar daripada spesifikasi.
- Gunakan Kekunci Tatal sehingga "LLit" muncul pada Paparan PV. Gunakan Kekunci Atas dan Bawah untuk menetapkan nilai LLit kepada nilai yang lebih tinggi daripada nilai asal.
- Tekan dan lepaskan Kekunci Tatal, kemudian "HLit" muncul pada Paparan PV. Gunakan Kekunci Atas dan Bawah untuk menetapkan nilai HLit kepada nilai yang lebih rendah daripada nilai asal.
- Matikan dan HIDUPKAN kuasa.
- Gunakan Kekunci Tatal sehingga "LCAL" muncul pada Paparan PV. Ambil perhatian tentang nilai LCAL.
- Tekan dan lepaskan Kekunci Tatal, kemudian "HCAL" muncul pada Paparan PV. Ambil nota tentang nilai HCAL.
- Tekan Kekunci Tatal selama sekurang-kurangnya 6 saat dan kemudian lepaskan, “PVL” muncul pada Paparan PV. Gunakan Kekunci ATAS dan Bawah untuk menetapkan nilai PVL kepada satu persepuluh nilai LCAL.
- Tekan dan lepaskan Kekunci Tatal, "PVH" muncul pada Paparan PV. Gunakan Kekunci ATAS dan Bawah untuk menetapkan nilai PVH kepada satu persepuluh nilai HCAL.
-Sila pasang pemutus litar 20A pada hujung bekalan kuasa
-Untuk mengeluarkan habuk sila gunakan kain kering
-Pemasangan bahawa keselamatan mana-mana sistem yang menggabungkan peralatan adalah tanggungjawab pemasang sistem
-Jika peralatan digunakan dengan cara yang tidak ditentukan oleh pengilang, perlindungan yang disediakan oleh peralatan mungkin terjejas
Jangan tutup lubang penyejuk untuk mengekalkan aliran udara
Berhati-hati untuk tidak mengetatkan skru terminal. Tork tidak boleh melebihi . 1 14 Nm ( 10 Lb-in atau 11.52 KgF-cm ), suhu Min.60°C, gunakan konduktor kuprum sahaja.
Kecuali pendawaian termokopel, semua pendawaian hendaklah menggunakan konduktor kuprum terkandas dengan tolok maksimum 18 AWG.
WARANTI
Brainchild Electronic Co., Ltd. berbesar hati untuk menawarkan cadangan tentang penggunaan pelbagai produknya.
Walau bagaimanapun, Brainchild tidak membuat sebarang jaminan atau representasi mengenai kesesuaian untuk digunakan, atau penggunaan produknya oleh Pembeli. Pemilihan, penggunaan atau penggunaan produk Brainchild adalah tanggungjawab Pembeli. Tiada tuntutan akan dibenarkan untuk sebarang kerosakan atau kerugian, sama ada secara langsung, tidak langsung, sampingan, khas atau berbangkit. Spesifikasi tertakluk kepada perubahan tanpa notis. Selain itu, Brainchild berhak untuk membuat perubahan-tanpa pemberitahuan kepada Pembeli-pada bahan atau pemprosesan yang tidak menjejaskan pematuhan mana-mana spesifikasi yang berkenaan. Produk brainchild dijamin bebas daripada kecacatan bahan dan mutu kerja selama 18 bulan selepas dihantar kepada pembeli pertama untuk digunakan. Tempoh lanjutan tersedia dengan kos tambahan atas permintaan. Tanggungjawab Brainchild sepenuhnya di bawah jaminan ini, atas pilihan Brainchild, adalah terhad kepada penggantian atau pembaikan, secara percuma atau bayaran balik harga pembelian dalam tempoh jaminan yang dinyatakan. Waranti ini tidak terpakai kepada kerosakan akibat pengangkutan, pengubahan, penyalahgunaan atau penyalahgunaan.
PULANGAN
Tiada pemulangan produk boleh diterima tanpa borang Kebenaran Bahan Pemulangan ( RMA ) yang lengkap.
NOTA:
Maklumat dalam manual pengguna ini tertakluk kepada perubahan tanpa notis.
Hak Cipta a 2023, The Brainchild Electronic Co., Ltd., semua hak terpelihara. Tiada bahagian daripada penerbitan ini boleh diterbitkan semula, dihantar, ditranskripsi atau disimpan dalam sistem perolehan semula, atau diterjemahkan ke dalam mana-mana bahasa dalam apa jua bentuk dengan sebarang cara tanpa kebenaran bertulis daripada Brainchild Electronic Co., Ltd.
![]() Untuk sebarang keperluan pembaikan atau penyelenggaraan, sila hubungi kami.
Untuk sebarang keperluan pembaikan atau penyelenggaraan, sila hubungi kami.
Electronic Co., Ltd.
No.209, Chung Yang Rd., Nan Kang Dist.,
Taipei 11573, Taiwan
Tel: 886-2-27861299
Faks: 886-2-27861395
web tapak: http://www.brainchildtw.com![]()
Dokumen / Sumber
 |
BrainChild BTC-9090 Pengawal Berasaskan Pemproses Mikro Logik Fuzzy [pdf] Manual Arahan BTC-9090, BTC-9090 G UL, BTC-9090 Fuzzy Logic Micro Processor Based Controller, Fuzzy Logic Micro Processor Based Controller, Micro Processor Based Controller, Processor Based Controller, Based Controller |