![]() בקר מבוסס מיקרו מעבד BTC-9090 Fuzzy Logic
בקר מבוסס מיקרו מעבד BTC-9090 Fuzzy Logic
מדריך הוראות
מָבוֹא
מדריך זה מכיל מידע על ההתקנה והתפעול של הבקר מבוסס מיקרו-מעבד Brainchild דגם BTC-9090 Fuzzy Logic.
ה- Fuzzy Logic הוא תכונה חיונית של הבקר הרב-תכליתי הזה. למרות שבקרת PID הייתה מקובלת על ידי תעשיות, עדיין קשה לבקרת PID לעבוד עם כמה מערכות מתוחכמות ביעילות, למשלampמערכות מסדר שני, פיגור ארוך, נקודות הגדרה שונות, עומסים שונים וכו' בגלל חסרוןtagבשל עקרונות שליטה וערכים קבועים של בקרת PID, זה לא יעיל לשלוט במערכות עם הרבה סוגים, והתוצאה כמובן מתסכלת עבור מערכות מסוימות. הלוגיקה המטושטשת מתגברת על החיסרוןtage של בקרת PID, היא שולטת במערכת בצורה יעילה על ידי חוויות שהיו לה בעבר. תפקידה של Fuzzy Logic הוא להתאים את ערכי ה-PID באופן עקיף על מנת להפוך את ערך הפלט של המניפולציה MV להתאים בצורה גמישה ומהירה לתהליכים שונים. בדרך זו, הוא מאפשר לתהליך להגיע לנקודת ההגדרה שנקבעה מראש שלו בזמן הקצר ביותר עם מינימום חריגה במהלך כוונון או הפרעה חיצונית. בשונה מבקרת PID עם מידע דיגיטלי, Fuzzy Logic היא בקרה עם מידע שפה.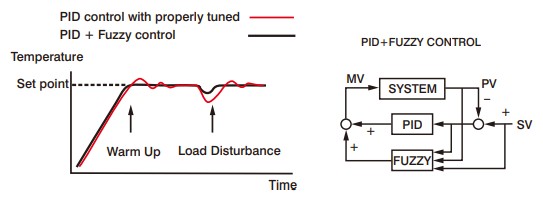
בנוסף, לכלי זה יש פונקציות של s בודדותtagאהamp והשהייה, כוונון אוטומטי וביצוע מצב ידני. קלות השימוש גם תכונה חיונית איתו.
מערכת מספור
מספר דגם ![]() (1) כניסת חשמל
(1) כניסת חשמל
| 4 | 90-264VAC |
| 5 | 20-32VAC/VDC |
| 9 | אַחֵר |
(2) כניסת אות
1 0 – 5V 3 PT100 DIN 5 TC 7 0 – 20mA 8 0 – 10V
(3) קוד טווח
| 1 | ניתן להגדרה |
| 9 | אַחֵר |
(4) מצב בקרה
| 3 | בקרת PID / ON-OFF |
(5) אפשרות פלט 1
| 0 | אַף לֹא אֶחָד |
| 1 | ממסר בעל דירוג התנגדות של 2A/240VAC |
| 2 | כונן SSR בדירוג של 20mA/24V |
| 3 | 4-20mA ליניארי, מקסימום. עומס 500 אוהם (מודול OM93-1) |
| 4 | 0-20mA ליניארי, מקסימום. עומס 500 אוהם (מודול OM93-2) |
| 5 | 0-10V ליניארי, מינימום. עכבה 500K אוהם (מודול OM93-3) |
| 9 | אַחֵר |
(6) אפשרות פלט 2
| 0 | אַף לֹא אֶחָד |
(7) אפשרות אזעקה
| 0 | אַף לֹא אֶחָד |
| 1 | ממסר בעל דירוג התנגדות של 2A/240VAC |
| 9 | אַחֵר |
(8) תקשורת
| 0 | אַף לֹא אֶחָד |
תיאור הלוח הקדמי טווח קלט ודיוק
טווח קלט ודיוק
| IN | חיישן | סוג קלט | טווח (BC) | דִיוּק |
| 0 | J | ברזל-קונסטנטן | -50 עד 999 לפני הספירה | A2 לפני הספירה |
| 1 | K | כרומל-אלומל | -50 עד 1370 לפני הספירה | A2 לפני הספירה |
| 2 | T | נחושת-קונסטנטן | -270 עד 400 לפני הספירה | A2 לפני הספירה |
| 3 | E | Chromel-Constantan | -50 עד 750 לפני הספירה | A2 לפני הספירה |
| 4 | B | Pt30%RH/Pt6%RH | 300 עד 1800 לפני הספירה | A3 לפני הספירה |
| 5 | R | Pt13%RH/Pt | 0 עד 1750 לפני הספירה | A2 לפני הספירה |
| 6 | S | Pt10%RH/Pt | 0 עד 1750 לפני הספירה | A2 לפני הספירה |
| 7 | N | ניקרוסיל-ניסיל | -50 עד 1300 לפני הספירה | A2 לפני הספירה |
| 8 | RTD | PT100 אוהם (DIN) | -200 עד 400 לפני הספירה | A0.4 לפני הספירה |
| 9 | RTD | PT100 אוהם (JIS) | -200 עד 400 לפני הספירה | A0.4 לפני הספירה |
| 10 | ליניארי | -10mV עד 60mV | -1999 עד 9999 | A0.05% |
מפרט
קֶלֶט
| צמד תרמי (T/C): | סוג J, K, T, E, B, R, S, N. |
| RTD: | PT100 אוהם RTD (DIN 43760/BS1904 או JIS) |
| ליניארי: | -10 עד 60 mV, הנחתת קלט ניתנת להגדרה |
| לָנוּעַ: | ניתן להגדרת משתמש, עיין בטבלה למעלה |
| דִיוּק: | עיין בטבלה למעלה |
| פיצוי צומת קר: | 0.1 לפנה"ס/לפני הספירה אופיינית לסביבה |
| הגנה מפני שבירת חיישן: | ניתן להגדרה של מצב הגנה |
| התנגדות חיצונית: | 100 אוהם מקסימום. |
| דחיית מצב רגיל: | 60 dB |
| דחיית מצב נפוץ: | 120dB |
| SampLe Rate: | 3 פעמים / שנייה |
לִשְׁלוֹט
| רצועת פרופורציה: | 0 - 200 לפני הספירה (0-360BF) |
| איפוס (אינטגרלי): | 0 - 3600 שניות |
| תעריף (נגזרת): | 0 - 1000 שניות |
| Ramp קֶצֶב: | 0 - 200.0 לפני הספירה לדקה (0 - 360.0 BF לדקה) |
| לִשְׁכּוֹן: | 0-3600 דקות |
| דולק כבוי: | עם היסטרזיס מתכוונן (0-20% מ-SPAN) |
| זמן מחזור: | 0-120 שניות |
| פעולת בקרה: | ישיר (לקירור) והיפוך (לחימום) |
| כּוֹחַ | 90-264VAC, 50/60Hz 10VA 20-32VDC/VAC, 50/60Hz 10VA |
סביבתי ופיזי
| בְּטִיחוּת: | UL 61010-1, מהדורה שלישית. CAN/CSA-C22.2 No. 61010-1(2012-05), מהדורה שלישית. |
| פליטת EMC: | EN50081-1 |
| חסינות EMC: | EN50082-2 |
| טמפרטורת הפעלה: | -10 עד 50 לפני הספירה |
| לַחוּת: | 0 עד 90% RH (ללא קידוד) |
| בִּדוּד: | 20M אוהם דקות (500 VDC) |
| הִתמוֹטְטוּת: | AC 2000V, 50/60 הרץ, דקה אחת |
| רֶטֶט: | 10 - 55 הרץ, ampאור 1 מ"מ |
| הֶלֶם: | 200 מ' לשנייה (20 גרם) |
| משקל נטו: | 170 גרם |
| חומרי דיור: | פלסטיק פולי-קרבונט |
| גוֹבַה: | פחות מ-2000 מ' |
| שימוש פנימי | |
| Overvoltage קטגוריה | II |
| דרגת זיהום: | 2 |
| תנודות מתח קלט הספק: | 10% מהנפח הנומינליtage |
הַתקָנָה
6.1 מימדים וחיתוך פאנל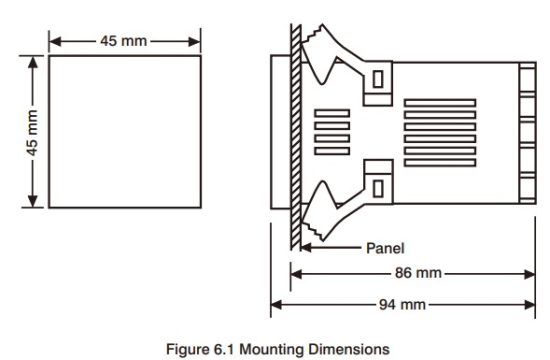 תרשים חיווט 6.2
תרשים חיווט 6.2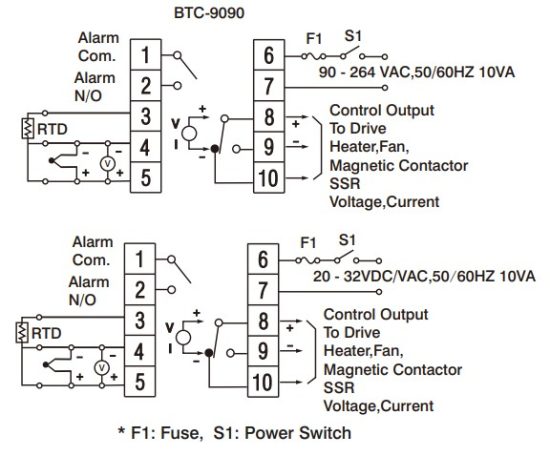
כִּיוּל
פֶּתֶק: אל תמשיך בסעיף זה אלא אם כן יש צורך אמיתי לכייל מחדש את הבקר. כל תאריך הכיול הקודם יאבד. אל תנסה כיול מחדש אלא אם כן יש לך ציוד כיול מתאים זמין. אם נתוני הכיול אובדים, יהיה עליך להחזיר את הבקר לספק שלך, אשר עשוי לחייב תשלום עבור כיול מחדש.
לפני הכיול ודא שכל הגדרות הפרמטרים נכונות (סוג קלט, C/F, רזולוציה, טווח נמוך, טווח גבוה).
- הסר את חיווט כניסת החיישן וחבר סימולטור קלט סטנדרטי מהסוג הנכון לכניסת הבקר. ודא קוטביות נכונה. הגדר את האות המדומה כך שיתאים לאות תהליך נמוך (למשל אפס מעלות).
- השתמש במקש הגלילה עד ל"
 " מופיע בצג ה-PV. (עיין ב-8.2)
" מופיע בצג ה-PV. (עיין ב-8.2) - השתמש במקשי למעלה ולמטה עד שתצוגת ה-PV מייצגת את הקלט המדומה.
- לחץ על מקש החזרה למשך 6 שניות לפחות (מקסימום 16 שניות), ולאחר מכן שחרר. זה מכניס את נתון הכיול הנמוך לזיכרון הלא נדיף של הבקר.
- לחץ ושחרר את מקש הגלילה. ”
 " מופיע בצג ה-PV. זה מציין את נקודת הכיול הגבוהה.
" מופיע בצג ה-PV. זה מציין את נקודת הכיול הגבוהה. - הגדל את אות הקלט המדומה כך שיתאים לאות 11-process גבוה (למשל 100 מעלות).
- השתמש במקשי למעלה ולמטה עד שתצוגת SV מייצגת את הקלט הגבוה המדומה.
- לחץ על מקש החזרה למשך 6 שניות לפחות (מקסימום 16 שניות), ולאחר מכן שחרר. זה מכניס את נתון הכיול הגבוה לזיכרון הלא נדיף של הבקר.
- כבה את היחידה, הסר את כל חיווטי הבדיקה והחלף את חיווט החיישן (תוך התבוננות בקוטביות).
מִבצָע
8.1 תפעול מקלדת
* עם ההפעלה, הוא צריך להמתין 12 שניות כדי לשנן את הערכים החדשים של הפרמטרים ברגע שהם שונו.
| מקשי מגע | פוּנקצִיָה | תֵאוּר |
| מקש גלילה | הקדם את תצוגת האינדקס למיקום הרצוי. האינדקס התקדם באופן רציף ומחזורי על ידי לחיצה על לוח מקשים זה. | |
| מפתח עילי | מגדיל את הפרמטר | |
| מקש למטה | מקטין את הפרמטר | |
| מפתח החזרה | מאפס את הבקר למצבו הרגיל. גם מפסיק כוונון אוטומטי, אחוז פלטtagניטור והפעלה במצב ידני. | |
| לִלְחוֹץ | גלילה ארוכה | מאפשר בדיקה או שינוי של פרמטרים נוספים. |
| לִלְחוֹץ | חזרה ארוכה | 1. מבצע פונקציית כוונון אוטומטי 2. מכייל בקרה ברמת כיול |
| לִלְחוֹץ | אחוז פלטtage צג | מאפשר לתצוגת נקודת ההגדרה לציין את ערך פלט הבקרה. |
| לִלְחוֹץ | ביצוע מצב ידני | מאפשר לבקר להיכנס למצב ידני. |
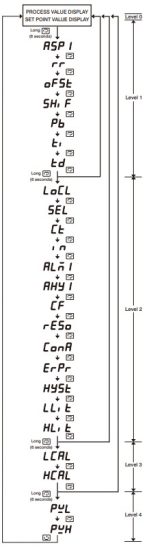
8.2 תרשים זרימה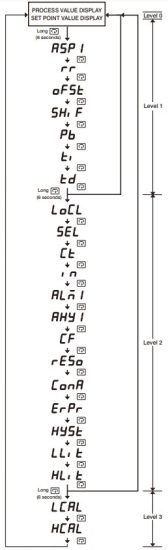 ניתן ללחוץ על מקש "חזור" בכל עת.
ניתן ללחוץ על מקש "חזור" בכל עת.
זה ינחה את התצוגה לחזור לערך התהליך/נקודת ההגדרה.
כוח מופעל:
 מוצג למשך 4 שניות. (תוכנה גרסה 3.6 ומעלה)
מוצג למשך 4 שניות. (תוכנה גרסה 3.6 ומעלה) בדיקת LED. כל מקטעי ה-LED חייבים להיות מוארים למשך 4 שניות.
בדיקת LED. כל מקטעי ה-LED חייבים להיות מוארים למשך 4 שניות.- ערך התהליך ונקודת ההגדרה מצוינים.
8.3 תיאור פרמטר
| קוד אינדקס | טווח התאמת תיאור | **הגדרת ברירת מחדל | ||
| SV | בקרת ערך קבע *מגבלה נמוכה לערך גבול גבוה | לא מוגדר | ||
| ערך נקודת קביעת אזעקה * מגבלה נמוכה לגבול גבוהה ואלue. if * 0 עד 3600 דקות (אם * גבול נמוך מינוסs נקודת הגדר לגבוה מגבלה מינוס ערך נקודת הגדר (אם | 200 לפני הספירה | |||
| Ramp דרג את ערך התהליך כדי להגביל שינוי פתאומי בתהליך (התחלה רכה) * 0 עד 200.0 לפני הספירה (360.0 BF) / דקה ( אם * 0 עד 3600 יחידות לדקה (אם | 0 לפני הספירה לדקה. | |||
| ערך היסט עבור איפוס ידני (אם | 0.0% | |||
| היסט היסט עבור ערך התהליך * -111 לפנה"ס עד 111 לפנה"ס | 0 לפני הספירה | |||
| להקה פרופורציונאלית * 0 עד 200 לפני הספירה (מוגדר ל-0 לשליטה על הפעלה וכיבוי) | 10 לפני הספירה | |||
| זמן אינטגרלי (איפוס). * 0 עד 3600 שניות | 120 שניות | |||
| זמן נגזרת (שיעור). * 0 עד 360.0 שניות | 30 שניות | |||
| מצב מקומי 0: לא ניתן לשנות פרמטרי בקרה 1: ניתן לשנות פרמטרי בקרה | 1 | |||
| בחירת פרמטרים (מאפשרת גישה לבחירה של פרמטרים נוספים ברמת אבטחה 0) | 0 | |||
| זמן מחזור פרופורציונלי * 0 עד 120 שניות | מִמסָר | 20 | ||
| Pulsed Voltage | 1 | |||
| וולט ליניארי/mA | 0 | |||
| בחירת מצב קלט 0: סוג J T/C 6: סוג S T/C 1: K סוג T/C 7: N סוג T/C 2: T type T/C 8: PT100 רַעַשׁ 3: סוג E T/C 9: PT100 JIS 4: B type T/C 10: Linear Voltage או Current 5: סוג R T/C הערה: T/C-Close הלחמה G5, RTD-Open G5 | T/C | 0 | ||
| RTD | 8 | |||
| ליניארי | 10 | |||
| בחירת מצב אזעקה 0: תהליך אזעקה גבוהה 8: אזעקת Outband 1: תהליך אזעקה נמוכה 9: אזעקה בתוך פס 2: אזעקת סטייה גבוהה 10: מניעת אזעקת פס יציאה 3: סטיה נמוכה אזעקה 11: מניעת אזעקה פנימית 4: מניעת אזעקה גבוהה בתהליך 12: ממסר אזעקה כבוי כ-5: מניעת אזעקת תהליך נמוך Dwell Time Out 6: מניעת סטייה גבוהה אזעקה 13: ממסר אזעקה פועל כ-7: מניעת סטייה נמוכה אזעקה פסק זמן | 0 | |||
| היסטרזיס של אזעקה 1 * 0 עד 20% מ-SPAN | 0.5% | |||
| בחירת BC / BF 0: BF, 1: לפני הספירה | 1 | |||
| בחירת רזולוציה 0: ללא נקודה עשרונית 2:2 ספרות עשרוניות 1:1 ספרות עשרוניות 3:3 ספרות עשרוניות (ניתן להשתמש ב-2 ו-3 רק עבור כרך ליניאריtage או נוכחי | 0 | |||
| פעולה בקרה 0: פעולה ישירה (קירור) 1: פעולה הפוכה (חום). | 1 | |||
| הגנה על שגיאות 0: שליטה כבויה, אזעקה כבויה 2: שליטה מופעלת, אזעקה כבויה 1: שליטה כבויה, אזעקה מופעלת 3: בקרה פועלת, אזעקה מופעלת | 1 | |||
| היסטרזיס לבקרת הפעלה/כיבוי *0 עד 20% מ-SPAN | 0.5% | |||
| גבול נמוך של טווח | -50 לפני הספירה | |||
| גבול טווח גבוה | 1000 לפני הספירה | |||
| איור כיול נמוך | 0 לפני הספירה | |||
| דמות כיול גבוהה | 800 לפני הספירה | |||
הערות: * התאמת טווח של הפרמטר
**הגדרות יצרן. אזעקות התהליך נמצאות בנקודות טמפרטורה קבועות. אזעקות סטייה נעות עם ערך הנקודות שנקבעו.
8.4 כוונון אוטומטי
- ודא שהבקר מוגדר ומותקן כהלכה.
- ודא שרצועת פרופורציונלית 'Pb' אינה מוגדרת על '0'.
- לחץ על מקש Return למשך 6 שניות לפחות (מקסימום 16 שניות). זה מאתחל את פונקציית הכוונון האוטומטי. (כדי לבטל את הליך הכוונון האוטומטי לחץ על מקש Return ושחרר).
- הנקודה העשרונית בפינה הימנית התחתונה של תצוגת ה-PV מהבהבת כדי לציין כיון אוטומטי מתבצע. הכוונון האוטומטי הושלם כאשר ההבהוב מפסיק.
- בהתאם לתהליך המסוים, כוונון אוטומטי עשוי להימשך עד שעתיים. תהליכים עם פיגור זמן ארוכים יידרשו הכי הרבה זמן לכוונון. זכור, בזמן שנקודת התצוגה מהבהבת, הבקר מכוון אוטומטית.
פֶּתֶק: אם שגיאת AT( ![]() ) מתרחשת, תהליך הכוונון האוטומטי מופסק עקב המערכת הפועלת בבקרת ON-OFF (PB=0).
) מתרחשת, תהליך הכוונון האוטומטי מופסק עקב המערכת הפועלת בבקרת ON-OFF (PB=0).
התהליך יבוטל גם אם נקודת ההגדרה מוגדרת קרוב לטמפרטורת התהליך או אם אין יכולת מספקת במערכת כדי להגיע לנקודת ההגדרה (לדוגמה, כוח חימום לא מספיק זמין). עם השלמת הכוונון האוטומטי הגדרות ה-PID החדשות מוזנות אוטומטית לזיכרון הלא נדיף של הבקר
8.5 כוונון PID ידני
בעוד שפונקציית הכוונון האוטומטי בוחרת בהגדרות בקרה שאמורות להוכיח את רצונם עבור רוב התהליכים, ייתכן שיהיה צורך לבצע התאמות להגדרות שרירותיות אלו מעת לעת. זה עשוי להיות המקרה אם נעשו כמה שינויים בתהליך או אם ברצונך 'לכוון' את הגדרות הבקרה.
חשוב שלפני ביצוע שינויים בהגדרות הבקרה תרשום את ההגדרות הנוכחיות לעיון עתידי. בצע שינויים קלים רק בהגדרה אחת בכל פעם וצפה בתוצאות בתהליך. מכיוון שכל אחת מההגדרות מקיימת אינטראקציה זו עם זו, קל להתבלבל עם התוצאות אם אינך בקי בהליכי בקרת תהליכים.
מדריך כוונון
להקה פרופורציונאלית
| סִימפּטוֹם | פִּתָרוֹן |
| תגובה איטית | הקטנת ערך PB |
| יתר או תנודות גבוהות | הגדל את ערך PB |
זמן אינטגרלי (איפוס)
| סִימפּטוֹם | פִּתָרוֹן |
| תגובה איטית | הקטנת זמן אינטגרלי |
| חוסר יציבות או תנודות | הגדל זמן אינטגרלי |
זמן גזירה (תעריף)
| סִימפּטוֹם | פִּתָרוֹן |
| תגובה איטית או תנודות | הקטנת נגזרת. זְמַן |
| מעבר גבוה | הגדל נגזרת. זְמַן |
8.6 נוהל כוונון ידני
שלב 1: כוונן את ערכי האינטגרל והנגזרת ל-0. זה מעכב את פעולת הקצב והאיפוס
שלב 2: הגדר ערך שרירותי של פס פרופורציונלי ועקוב אחר תוצאות הבקרה
שלב 3: אם ההגדרה המקורית מציגה תנודת תהליך גדול, הגדל בהדרגה את הרצועה הפרופורציונלית עד שתתרחש רכיבה יציבה. רשום את ערך הלהקה הפרופורציונלי הזה (Pc).
שלב 4: מדוד את תקופת הרכיבה היציבה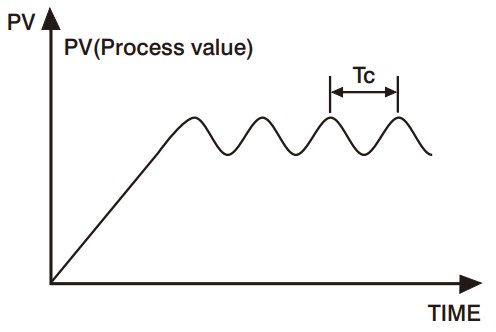 רשום ערך זה (Tc) בשניות
רשום ערך זה (Tc) בשניות
שלב 5: הגדרות הבקרה נקבעות באופן הבא:
רצועת פרופורציה (PB)=1.7 Pc
זמן אינטגרלי (TI)=0.5 Tc
זמן נגזרת(TD)=0.125 Tc
8.7 RAMP & DWELL
ניתן להגדיר את בקר BTC-9090 כך שיפעל כבקר נקודת הגדרה קבועה או כ-r יחידamp בקר בהפעלה. פונקציה זו מאפשרת למשתמש להגדיר r מוגדר מראשamp קצב כדי לאפשר לתהליך להגיע בהדרגה לטמפרטורת נקודת ההגדרה, ובכך לייצר פונקציית 'התחלה רכה'.
טיימר שהייה משולב בתוך ה-BTC-9090 וניתן להגדיר את ממסר האזעקה לספק פונקציית שהייה לשימוש בשילוב עם ה-ramp פוּנקצִיָה.
ה-ramp התעריף נקבע על ידי ' ![]() ' פרמטר שניתן לכוונן בטווח של 0 עד 200.0 לפני הספירה לדקה. ה-ramp פונקציית הקצב מושבתת כאשר '
' פרמטר שניתן לכוונן בטווח של 0 עד 200.0 לפני הספירה לדקה. ה-ramp פונקציית הקצב מושבתת כאשר ' ![]() הפרמטר ' מוגדר ל' 0 '.
הפרמטר ' מוגדר ל' 0 '.
פונקציית ההשריה מופעלת על ידי קביעת תצורת פלט האזעקה לפעול כטיימר שהייה. הפרמטר ![]() צריך להגדיר לערך 12. מגע האזעקה יפעל כעת כמגע טיימר, כאשר המגע ייסגר בעת הפעלת המתח ונפתח לאחר הזמן שחלף שנקבע בפרמטר
צריך להגדיר לערך 12. מגע האזעקה יפעל כעת כמגע טיימר, כאשר המגע ייסגר בעת הפעלת המתח ונפתח לאחר הזמן שחלף שנקבע בפרמטר![]() .
.
אם ספק הכוח או הפלט של הבקר מחוברים דרך מגע האזעקה, הבקר יפעל כבקר השרייה מובטח.
באקסampלה מתחת ל-Ramp הקצב מוגדר ל-5 לפני הספירה לדקה, ![]() = 12 ו
= 12 ו ![]() =15 (דקות). הכוח מופעל בזמן אפס והתהליך מטפס במהירות של 5 לפנה"ס לדקה לנקודת ההגדרה של 125 לפנה"ס. בהגעה לנקודת ההגדרה, טיימר השהייה מופעל ולאחר זמן השרייה של 15 דקות, יפתח קשר האזעקה, ויכבה את הפלט. טמפרטורת התהליך תרד בסופו של דבר בקצב לא מוגדר.
=15 (דקות). הכוח מופעל בזמן אפס והתהליך מטפס במהירות של 5 לפנה"ס לדקה לנקודת ההגדרה של 125 לפנה"ס. בהגעה לנקודת ההגדרה, טיימר השהייה מופעל ולאחר זמן השרייה של 15 דקות, יפתח קשר האזעקה, ויכבה את הפלט. טמפרטורת התהליך תרד בסופו של דבר בקצב לא מוגדר.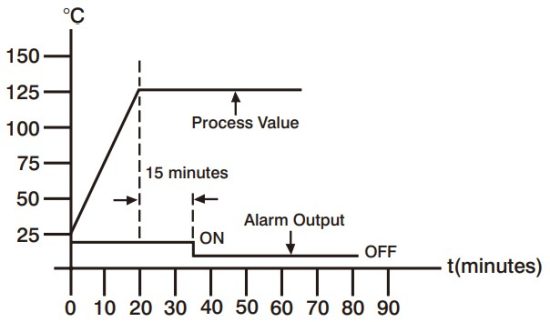 ניתן להשתמש בפונקציית השהייה כדי להפעיל מכשיר חיצוני כגון סירנה כדי להתריע כאשר הגיעה זמן השרייה.
ניתן להשתמש בפונקציית השהייה כדי להפעיל מכשיר חיצוני כגון סירנה כדי להתריע כאשר הגיעה זמן השרייה.
צריך להיות מוגדר לערך 13. קשר האזעקה יפעל כעת כאיש קשר טיימר, כאשר איש הקשר פתוח בהפעלה הראשונית. הטיימר מתחיל לספור לאחור ברגע שהטמפרטורה מוגדרת. לאחר שההגדרה ב חלפה, מגע האזעקה נסגר.
הודעות שגיאה
| סִימפּטוֹם | סיבה (ים) | פתרונות) |
| שגיאת שבירת חיישן | החלף RTD או חיישן השתמש במצב ידני | |
| תצוגת תהליך מעבר לנקודת ההגדרה של הטווח הנמוך | התאם מחדש את הערך | |
| תצוגת תהליך מעבר לנקודת ההגדרה של הטווח הגבוה | התאם מחדש את הערך | |
| נזק למודול היברידי אנלוגי | החלף מודול. בדוק אם יש מקור חיצוני לנזק כגון כרך חולףtagדוקרנים | |
| פעולה שגויה של הליך הכוונון האוטומטי מאפיין רצועה מוגדרת ל-0 | חזור על ההליך. הגדל את ה-Proper. Band למספר גדול מ-0 | |
| מצב ידני אינו מותר עבור מערכת בקרה ON-OFF | הגדל פס פרופורציונלי | |
| בדוק שגיאת סכום, ייתכן שהערכים בזיכרון השתנו בטעות | בדוק והגדר מחדש את פרמטרי הבקרה |
הוראה משלימה לגרסה החדשה
ליחידה עם גרסת קושחה V3.7 יש שני פרמטרים נוספים - "PVL" ו-"PVH" הממוקמים ברמה 4 כתרשים זרימה של פרמטרים בצד שמאל.
כאשר אתה צריך לשנות את ערך LLit לערך גבוה יותר או לשנות את ערך HLit לערך נמוך יותר, יש לבצע את ההליכים הבאים כדי להפוך את ערך PVL שווה ערך לעשירית מערך LCAL ואת PVH alue שווה ערך לעשירית מערך HCAL. אחרת ערכי התהליך הנמדדים יהיו מחוץ למפרט.
- השתמש במקש הגלילה עד להופעת "LLit" בצג ה-PV. השתמש במקשי למעלה ולמטה כדי להגדיר את ערך LLit לערך גבוה מהערך המקורי.
- לחץ ושחרר את מקש הגלילה, ואז "HLit" מופיע בצג ה-PV. השתמש במקשי למעלה ולמטה כדי להגדיר את ערך HLit לערך נמוך מהערך המקורי.
- כבה והדלק את הכוח.
- השתמש במקש הגלילה עד להופעת "LCAL" בצג ה-PV. שים לב לערך LCAL.
- לחץ ושחרר את מקש הגלילה, ואז "HCAL" מופיע בצג ה-PV. שים לב לערך HCAL.
- לחץ על מקש הגלילה למשך 6 שניות לפחות ולאחר מכן שחרר, "PVL" מופיע בצג ה-PV. השתמש במקשי למעלה ולמטה כדי להגדיר את ערך PVL לעשירית מערך LCAL.
- לחץ ושחרר את מקש הגלילה, "PVH" מופיע בצג ה-PV. השתמש במקשי למעלה ולמטה כדי להגדיר את ערך PVH לעשירית מערך HCAL.
-אנא התקן מפסק 20A בקצה אספקת החשמל
-כדי להסיר את האבק אנא השתמש במטלית היבשה
-ההתקנה שבטיחות כל מערכת המשלבת את הציוד היא באחריות מרכיב המערכת
-אם נעשה שימוש בציוד באופן שלא צוין על ידי היצרן, ההגנה שמספק הציוד עלולה להיפגע
אל תכסה את פתחי הקירור כדי לשמור על זרימת האוויר
היזהר לא להדק יתר על המידה את ברגי המסוף. המומנט לא יעלה על . 1 14 ננומטר ( 10 Lb-in או 11.52 KgF-cm ), טמפרטורה מינימום 60°C, השתמש במוליכי נחושת בלבד.
מלבד החיווט של הצמד התרמי, כל החיווט צריך להשתמש במוליך נחושת תקוע עם מד מקסימלי של 18 AWG.
אַחֲרָיוּת
Brainchild Electronic Co., Ltd שמחה להציע הצעות לשימוש במוצרים השונים שלה.
עם זאת, Brainchild אינה נותנת אחריות או מצגים מכל סוג שהוא בנוגע לכשירות לשימוש, או ליישום מוצריה על ידי הרוכש. הבחירה, היישום או השימוש במוצרי Brainchild הם באחריות הרוכש. לא תותר תביעה בגין נזקים או הפסדים כלשהם, בין אם ישירים, עקיפים, מקריים, מיוחדים או תוצאתיים. המפרט נתון לשינוי ללא הודעה מוקדמת. בנוסף, Brainchild שומרת לעצמה את הזכות לבצע שינויים - ללא הודעה לרוכש - בחומרים או בעיבוד שאינם משפיעים על עמידה במפרט רלוונטי כלשהו. מוצרי Brainchild מתחייבים להיות נקיים מפגמים בחומר ובעבודה למשך 18 חודשים לאחר המסירה לרוכש הראשון לשימוש. תקופה ממושכת זמינה בעלות נוספת על פי בקשה. האחריות הבלעדית של Brainchild במסגרת אחריות זו, לבחירתה של Brainchild, מוגבלת להחלפה או תיקון, ללא תשלום, או החזר של מחיר הרכישה בתוך תקופת האחריות שצוינה. אחריות זו אינה חלה על נזק הנובע מהובלה, שינוי, שימוש לרעה או שימוש לרעה.
החזרות
לא ניתן לקבל החזרת מוצרים ללא טופס החזר חומר הרשאה (RMA) מלא.
פֶּתֶק:
המידע במדריך למשתמש זה נתון לשינוי ללא הודעה מוקדמת.
זכויות יוצרים 2023, The Brainchild Electronic Co., Ltd., כל הזכויות שמורות. אין לשכפל, לשדר, לתמלל או לאחסן שום חלק מפרסום זה במערכת אחזור, או לתרגם לשפה כלשהי בכל צורה שהיא בכל אמצעי ללא אישור בכתב מאת Brainchild Electronic Co., Ltd.
![]() לכל צרכי תיקון או תחזוקה, אנא פנה אלינו.
לכל צרכי תיקון או תחזוקה, אנא פנה אלינו.
חברת אלקטרוניקה בע"מ
No.209, Chung Yang Rd., Nan Kang Dist.,
טייפה 11573, טייוואן
טל': 886-2-27861299
פקס: 886-2-27861395
web אֲתַר: http://www.brainchildtw.com![]()
מסמכים / משאבים
 | בקר מבוסס מיקרו מעבד BrainChild BTC-9090 Fuzzy Logic [pdfמדריך הוראות BTC-9090, BTC-9090 G UL, BTC-9090 Fuzzy Logic Micro Processor Based Controller, Fuzzy Logic Micro Processor Based Controller, Fuzzy Logic Micro Processor Based Controller, Controller Based Micro Processor, Controller מבוסס מעבד, בקר מבוסס |