![]() BTC-9090 Fuzzy Logic Micro Processor Based Controller
BTC-9090 Fuzzy Logic Micro Processor Based Controller
ຄູ່ມືການສອນ
ແນະນຳ
ຄູ່ມືນີ້ປະກອບດ້ວຍຂໍ້ມູນສໍາລັບການຕິດຕັ້ງແລະການດໍາເນີນງານຂອງ Brainchild model BTC-9090 Fuzzy Logic micro-processor controller.
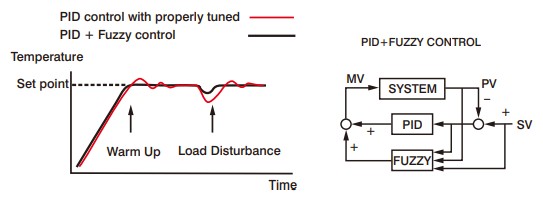
Fuzzy Logic ເປັນລັກສະນະທີ່ສໍາຄັນຂອງຕົວຄວບຄຸມອະເນກປະສົງນີ້. ເຖິງແມ່ນວ່າການຄວບຄຸມ PID ໄດ້ຮັບການຍອມຮັບຢ່າງກວ້າງຂວາງໂດຍອຸດສາຫະກໍາ, ແຕ່ມັນກໍ່ເປັນການຍາກສໍາລັບການຄວບຄຸມ PID ທີ່ຈະເຮັດວຽກກັບບາງລະບົບ sophistic ຢ່າງມີປະສິດທິພາບ, ສໍາລັບ ex.amples ລະບົບຂອງຄໍາສັ່ງທີສອງ, ໄລຍະເວລາຍາວ, ຈຸດທີ່ກໍານົດໄວ້ຕ່າງໆ, ການໂຫຼດຕ່າງໆ, ແລະອື່ນໆເນື່ອງຈາກວ່າ disadvantage ຂອງຫຼັກການການຄວບຄຸມແລະຄ່າຄົງທີ່ຂອງການຄວບຄຸມ PID, ມັນບໍ່ມີປະສິດຕິພາບໃນການຄວບຄຸມລະບົບທີ່ມີແນວພັນທີ່ອຸດົມສົມບູນ, ແລະຜົນໄດ້ຮັບແມ່ນແນ່ນອນທີ່ຫນ້າເສົ້າໃຈສໍາລັບບາງລະບົບ. The Fuzzy Logic ຄວບຄຸມການເອົາຊະນະ disadvan ໄດ້tage ຂອງການຄວບຄຸມ PID, ມັນຄວບຄຸມລະບົບທີ່ມີປະສິດທິພາບໂດຍປະສົບການທີ່ມັນມີມາກ່ອນ. ຫນ້າທີ່ຂອງ Fuzzy Logic ແມ່ນເພື່ອປັບຄ່າ PID ໂດຍທາງອ້ອມເພື່ອເຮັດໃຫ້ມູນຄ່າການຫມູນໃຊ້ MV ປັບຕົວໄດ້ໄວແລະປັບຕົວເຂົ້າກັບຂະບວນການຕ່າງໆ. ໂດຍວິທີນີ້, ມັນເຮັດໃຫ້ຂະບວນການສາມາດບັນລຸຈຸດທີ່ກໍານົດໄວ້ລ່ວງຫນ້າຂອງມັນໃນເວລາອັນສັ້ນທີ່ສຸດດ້ວຍການ overshooting ຕໍາ່ສຸດໃນລະຫວ່າງການ tuning ຫຼືການລົບກວນພາຍນອກ. ແຕກຕ່າງຈາກການຄວບຄຸມ PID ກັບຂໍ້ມູນດິຈິຕອນ, Fuzzy Logic ແມ່ນການຄວບຄຸມທີ່ມີຂໍ້ມູນພາສາ.
ນອກຈາກນັ້ນ, ເຄື່ອງມືນີ້ມີຫນ້າທີ່ຂອງ single stagເອີamp ແລະຢູ່, ອັດຕະໂນມັດ tunung ແລະການປະຕິບັດຮູບແບບຄູ່ມື. ຄວາມງ່າຍຂອງການນໍາໃຊ້ຍັງເປັນຄຸນນະສົມບັດທີ່ສໍາຄັນກັບມັນ.
ລະບົບ NUMBERING
ຮຸ່ນ ![]() (1) ການປ້ອນຂໍ້ມູນພະລັງງານ
(1) ການປ້ອນຂໍ້ມູນພະລັງງານ
| 4 | 90-264VAC |
| 5 | 20-32VAC/VDC |
| 9 | ອື່ນໆ |
(2) ການປ້ອນສັນຍານ
1 0 – 5V 3 PT100 DIN 5 TC 7 0 – 20mA 8 0 – 10V
(3) ລະຫັດຊ່ວງ
| 1 | ຕັ້ງຄ່າໄດ້ |
| 9 | ອື່ນໆ |
(4) ຮູບແບບການຄວບຄຸມ
| 3 | PID / ON-OFF ການຄວບຄຸມ |
(5) ຜົນຜະລິດ 1 ທາງເລືອກ
| 0 | ບໍ່ມີ |
| 1 | Relay ຈັດອັນດັບຄວາມຕ້ານທານ 2A/240VAC |
| 2 | SSR Drive ໃຫ້ຄະແນນ 20mA/24V |
| 3 | 4-20mA linear, ສູງສຸດທີ່ເຄຍ. ໂຫຼດ 500 ohms (ໂມດູນ OM93-1) |
| 4 | 0-20mA linear, ສູງສຸດທີ່ເຄຍ. ໂຫຼດ 500 ohms (ໂມດູນ OM93-2) |
| 5 | 0-10V linear, min. impedance 500K ohms (ໂມດູນ OM93-3) |
| 9 | ອື່ນໆ |
(6) ຜົນຜະລິດ 2 ທາງເລືອກ
| 0 | ບໍ່ມີ |
(7) ທາງເລືອກປຸກ
| 0 | ບໍ່ມີ |
| 1 | Relay ຈັດອັນດັບຄວາມຕ້ານທານ 2A/240VAC |
| 9 | ອື່ນໆ |
(8) ການສື່ສານ
| 0 | ບໍ່ມີ |
ລາຍລະອຽດຂອງ PANEL FRONT
 ໄລຍະການປ້ອນຂໍ້ມູນ & ຄວາມຖືກຕ້ອງ
ໄລຍະການປ້ອນຂໍ້ມູນ & ຄວາມຖືກຕ້ອງ
| IN | ເຊັນເຊີ | ປະເພດປ້ອນຂໍ້ມູນ | ຊ່ວງ(BC) | ຄວາມຖືກຕ້ອງ |
| 0 | J | ທາດເຫຼັກ-Constantan | -50 ຫາ 999 ປີ ກ່ອນ ຄ.ສ | A2 BC |
| 1 | K | Chromel-Alumel | -50 ຫາ 1370 ປີ ກ່ອນ ຄ.ສ | A2 BC |
| 2 | T | ທອງແດງ-Constantan | -270 ຫາ 400 ປີ ກ່ອນ ຄ.ສ | A2 BC |
| 3 | E | Chromel-Constantan | -50 ຫາ 750 ປີ ກ່ອນ ຄ.ສ | A2 BC |
| 4 | B | Pt30%RH/Pt6%RH | 300 ຫາ 1800 BC | A3 BC |
| 5 | R | Pt13%RH/Pt | 0 ຫາ 1750 BC | A2 BC |
| 6 | S | Pt10%RH/Pt | 0 ຫາ 1750 BC | A2 BC |
| 7 | N | Nicrosil-Nisil | -50 ຫາ 1300 ປີ ກ່ອນ ຄ.ສ | A2 BC |
| 8 | RTD | PT100 ohms(DIN) | -200 ຫາ 400 ປີ ກ່ອນ ຄ.ສ | A0.4 BC |
| 9 | RTD | PT100 ohms(JIS) | -200 ຫາ 400 ປີ ກ່ອນ ຄ.ສ | A0.4 BC |
| 10 | ເສັ້ນ | -10mV ເຖິງ 60mV | -1999 ເຖິງ 9999 | A0.05% |
ຂໍ້ມູນຈໍາເພາະ
ປ້ອນຂໍ້ມູນ
| Thermocouple (T/C): | ປະເພດ J, K, T, E, B, R, S, N. |
| RTD: | PT100 ohm RTD (DIN 43760/BS1904 ຫຼື JIS) |
| ເສັ້ນຊື່: | -10 ຫາ 60 mV, configurable input attenuation |
| ຊ່ວງ: | ຜູ້ໃຊ້ສາມາດຕັ້ງຄ່າໄດ້, ເບິ່ງຕາຕະລາງຂ້າງເທິງ |
| ຄວາມຖືກຕ້ອງ: | ອ້າງເຖິງຕາຕະລາງຂ້າງເທິງ |
| ການຊົດເຊີຍ Cold Junction: | 0.1 BC/BC ສະພາບແວດລ້ອມປົກກະຕິ |
| ການປ້ອງກັນການແຕກຫັກຂອງເຊັນເຊີ: | ຮູບແບບການປົກປ້ອງສາມາດຕັ້ງຄ່າໄດ້ |
| ການຕໍ່ຕ້ານພາຍນອກ: | ສູງສຸດ 100 ohms |
| ການປະຕິເສດໂໝດປົກກະຕິ: | 60 dB |
| ການປະຕິເສດແບບທົ່ວໄປ: | 120dB |
| Sampອັດຕາ le: | 3 ຄັ້ງ / ວິນາທີ |
ຄວບຄຸມ
| ແຖບອັດຕາສ່ວນ: | 0 – 200 BC (0-360BF) |
| ຣີເຊັດ (ບໍ່ລວມ): | 0 – 3600 ວິນາທີ |
| ອັດຕາ (Derivative): | 0 – 1000 ວິນາທີ |
| Ramp ອັດຕາ: | 0 – 200.0 BC/ນາທີ (0 – 360.0 BF/ນາທີ) |
| ທີ່ຢູ່: | 0 – 3600 ນາທີ |
| ເປີດ-ປິດ: | ດ້ວຍ hysteresis ທີ່ສາມາດປັບໄດ້ (0-20% ຂອງ SPAN) |
| ເວລາຮອບວຽນ: | 0-120 ວິນາທີ |
| ການປະຕິບັດການຄວບຄຸມ: | ໂດຍກົງ (ສໍາລັບການເຮັດຄວາມເຢັນ) ແລະປີ້ນກັບກັນ (ສໍາລັບການເຮັດຄວາມຮ້ອນ) |
| ພະລັງງານ | 90-264VAC, 50/60Hz 10VA 20-32VDC/VAC, 50/60Hz 10VA |
ສິ່ງແວດລ້ອມ ແລະທາງກາຍຍະພາບ
| ຄວາມປອດໄພ: | UL 61010-1, ສະບັບທີ 3. CAN/CSA-C22.2 No. 61010-1(2012-05), ສະບັບທີ 3. |
| ການປ່ອຍອາຍພິດ EMC: | EN50081-1 |
| ພູມຕ້ານທານ EMC: | EN50082-2 |
| ອຸນຫະພູມປະຕິບັດການ: | -10 ຫາ 50 ປີ ກ່ອນ ຄ.ສ |
| ຄວາມຊຸ່ມຊື່ນ: | 0 ຫາ 90 % RH (ບໍ່ແມ່ນລະຫັດ) |
| insulation: | 20M ohms ນທ. (500 VDC) |
| ລາຍລະອຽດ: | AC 2000V, 50/60 Hz, 1 ນາທີ |
| ການສັ່ນສະເທືອນ: | 10 – 55 Hz, ampເສັ້ນຂະ ໜານ 1 ມມ |
| ຊ໊ອກ: | 200 m/s (20g) |
| ນ້ຳໜັກສຸດທິ: | 170 ກຣາມ |
| ວັດສະດຸທີ່ຢູ່ອາໃສ: | ພາດສະຕິກ Poly-Carbonate |
| ລະດັບຄວາມສູງ: | ຫນ້ອຍກວ່າ 2000 m |
| ການນໍາໃຊ້ພາຍໃນ | |
| Overvoltage ປະເພດ | II |
| ລະດັບມົນລະພິດ: | 2 |
| ການເໜັງຕີງຂອງແຮງດັນໄຟຟ້າເຂົ້າ: | 10% ຂອງ voltage |
ການຕິດຕັ້ງ
6.1 ມິຕິ ແລະ ການຕັດແຖບ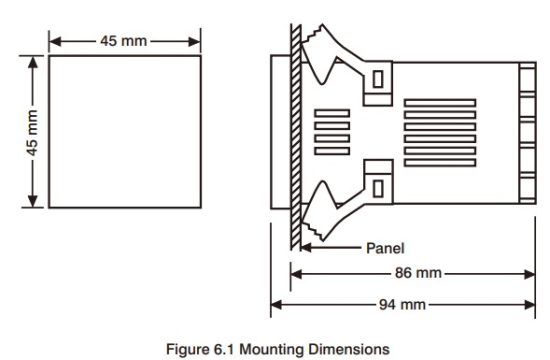 6.2 ແຜນຜັງສາຍ
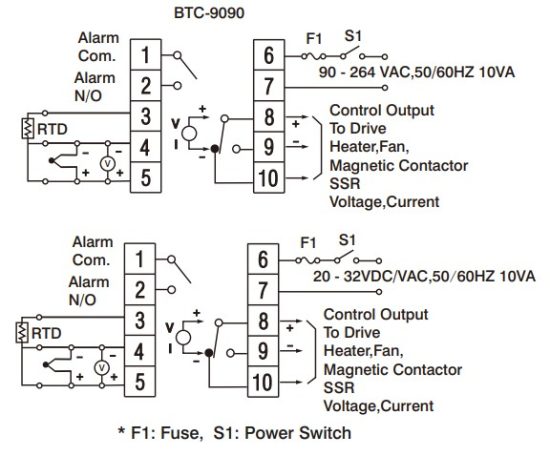
6.2 ແຜນຜັງສາຍ
ການບັນຈຸ
ໝາຍເຫດ: ຢ່າດໍາເນີນການຜ່ານພາກນີ້ເວັ້ນເສຍແຕ່ວ່າພວກເຂົາຕ້ອງການທີ່ແທ້ຈິງທີ່ຈະປັບຕົວຄວບຄຸມຄືນໃຫມ່. ວັນທີການສອບທຽບທີ່ຜ່ານມາທັງຫມົດຈະສູນເສຍໄປ. ຢ່າພະຍາຍາມປັບປັບໃໝ່ ເວັ້ນເສຍແຕ່ເຈົ້າມີອຸປະກອນການປັບທຽບທີ່ເໝາະສົມ. ຖ້າຂໍ້ມູນການປັບຕົວສູນຫາຍໄປ, ທ່ານຈະຕ້ອງສົ່ງຄືນເຄື່ອງຄວບຄຸມໃຫ້ກັບຜູ້ສະຫນອງຂອງທ່ານ, ເຊິ່ງອາດຈະໃຊ້ຄ່າໃຊ້ຈ່າຍສໍາລັບການປັບທຽບຄືນໃຫມ່.
ກ່ອນທີ່ຈະ calibration ໃຫ້ແນ່ໃຈວ່າການຕັ້ງຄ່າພາລາມິເຕີທັງຫມົດແມ່ນຖືກຕ້ອງ (ປະເພດການປ້ອນຂໍ້ມູນ, C / F, ຄວາມລະອຽດ, ລະດັບຕ່ໍາ, ລະດັບສູງ).
- ຖອດສາຍໄຟປ້ອນຂໍ້ມູນເຊັນເຊີອອກ ແລະເຊື່ອມຕໍ່ເຄື່ອງຈຳລອງການປ້ອນຂໍ້ມູນມາດຕະຖານຂອງປະເພດທີ່ຖືກຕ້ອງກັບອິນພຸດຂອງຕົວຄວບຄຸມ. ຢືນຢັນ polarity ທີ່ຖືກຕ້ອງ. ຕັ້ງສັນຍານຈໍາລອງໃຫ້ກົງກັນກັບສັນຍານຂະບວນການຕໍ່າ (ຕົວຢ່າງ: ສູນອົງສາ).
- ໃຊ້ປຸ່ມເລື່ອນຈົນກ່ວາ ”
 ” ປາກົດຢູ່ໃນຈໍສະແດງຜົນ PV. (ອ້າງອີງເຖິງ 8.2)
” ປາກົດຢູ່ໃນຈໍສະແດງຜົນ PV. (ອ້າງອີງເຖິງ 8.2) - ໃຊ້ປຸ່ມຂຶ້ນ ແລະລົງ ຈົນກ່ວາຈໍສະແດງຜົນ PV ເປັນຕົວແທນຂອງການປ້ອນຂໍ້ມູນຈໍາລອງ.
- ກົດ Return Key ຢ່າງໜ້ອຍ 6 ວິນາທີ (ສູງສຸດ 16 ວິນາທີ), ຈາກນັ້ນປ່ອຍ. ນີ້ເຂົ້າໄປໃນຕົວເລກການປັບຕ່ໍາເຂົ້າໄປໃນຫນ່ວຍຄວາມຈໍາທີ່ບໍ່ມີການລະເຫີຍຂອງຕົວຄວບຄຸມ.
- ກົດແລະປ່ອຍປຸ່ມເລື່ອນ. ”
 ” ປາກົດຢູ່ໃນຈໍສະແດງຜົນ PV. ນີ້ຊີ້ໃຫ້ເຫັນຈຸດການປັບຕົວສູງ.
” ປາກົດຢູ່ໃນຈໍສະແດງຜົນ PV. ນີ້ຊີ້ໃຫ້ເຫັນຈຸດການປັບຕົວສູງ. - ເພີ່ມສັນຍານ input simulated ກັບ coincide ກັບສັນຍານ 11process ສູງ (ເຊັ່ນ: 100 ອົງສາ).
- ໃຊ້ປຸ່ມຂຶ້ນ ແລະລົງ ຈົນກວ່າຈໍສະແດງຜົນ SV ເປັນຕົວແທນຂອງວັດສະດຸປ້ອນສູງທີ່ຈຳລອງ.
- ກົດ Return Key ຢ່າງໜ້ອຍ 6 ວິນາທີ (ສູງສຸດ 16 ວິນາທີ), ຈາກນັ້ນປ່ອຍ. ນີ້ເຂົ້າໄປໃນຕົວເລກການປັບຕົວສູງເຂົ້າໄປໃນຫນ່ວຍຄວາມຈໍາທີ່ບໍ່ມີການລະເຫີຍຂອງຕົວຄວບຄຸມ.
- ປິດເຄື່ອງ, ເອົາສາຍໄຟທົດສອບທັງໝົດອອກ ແລະປ່ຽນສາຍໄຟເຊັນເຊີ (ສັງເກດຂົ້ວ).
ການດໍາເນີນງານ
8.1 ການດໍາເນີນງານຂອງປຸ່ມກົດ
* ເມື່ອເປີດເຄື່ອງແລ້ວ, ມັນຕ້ອງລໍຖ້າ 12 ວິນາທີເພື່ອຈື່ຄ່າໃໝ່ຂອງພາລາມິເຕີເມື່ອມັນຖືກປ່ຽນ.
| ແຕະຄີ | ຟັງຊັນ | ລາຍລະອຽດ |
| ປຸ່ມເລື່ອນ | ເລື່ອນການສະແດງດັດຊະນີໄປຫາຕໍາແຫນ່ງທີ່ຕ້ອງການ. ດັດຊະນີກ້າວຫນ້າຢ່າງຕໍ່ເນື່ອງແລະຮອບວຽນໂດຍການກົດປຸ່ມນີ້. |
|
| ປຸ່ມຂຶ້ນ | ເພີ່ມພາລາມິເຕີ | |
| ລົງຫຼັກ | ຫຼຸດລົງພາລາມິເຕີ | |
| ກະແຈກັບຄືນ | ຣີເຊັດຕົວຄວບຄຸມເປັນສະຖານະປົກກະຕິຂອງມັນ. ຍັງຢຸດການປັບອັດຕະໂນມັດ, ຜົນຜະລິດ percentage ການຕິດຕາມແລະການດໍາເນີນງານແບບຄູ່ມື. | |
| ກົດ |
ເລື່ອນຍາວ | ອະນຸຍາດໃຫ້ມີການກວດກາ ຫຼືປ່ຽນແປງຕົວກໍານົດການເພີ່ມເຕີມ. |
| ກົດ |
ກັບຄືນຍາວ | 1. ປະຕິບັດຫນ້າທີ່ປັບອັດຕະໂນມັດ 2. calibrates ການຄວບຄຸມໃນເວລາທີ່ຢູ່ໃນລະດັບການ calibration |
| ກົດ |
ຜົນຜະລິດ Percentage ຕິດຕາມກວດກາ | ອະນຸຍາດໃຫ້ຈຸດທີ່ກໍານົດໄວ້ສະແດງໃຫ້ເຫັນຄ່າການຜະລິດການຄວບຄຸມ. |
| ກົດ |
ການປະຕິບັດຮູບແບບຄູ່ມື | ອະນຸຍາດໃຫ້ຕົວຄວບຄຸມເຂົ້າສູ່ໂໝດຄູ່ມື. |
8.2 ແຜນຜັງກະແສ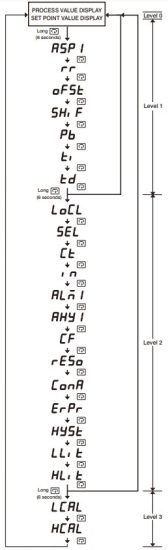 ປຸ່ມ "ກັບຄືນ" ສາມາດຖືກກົດໄດ້ທຸກເວລາ.
ປຸ່ມ "ກັບຄືນ" ສາມາດຖືກກົດໄດ້ທຸກເວລາ.
ນີ້ຈະເປັນການກະຕຸ້ນໃຫ້ຈໍສະແດງຜົນກັບຄືນໄປຫາຄ່າຂະບວນການ/ຄ່າຈຸດທີ່ຕັ້ງ.
ນຳໃຊ້ພະລັງງານ:
 ສະແດງເປັນເວລາ 4 ວິນາທີ. (ຊອບແວເວີຊັ່ນ 3.6 ຫຼືສູງກວ່າ)
ສະແດງເປັນເວລາ 4 ວິນາທີ. (ຊອບແວເວີຊັ່ນ 3.6 ຫຼືສູງກວ່າ) ການທົດສອບ LED. ພາກສ່ວນ LED ທັງໝົດຕ້ອງຖືກໄຟເປັນເວລາ 4 ວິນາທີ.
ການທົດສອບ LED. ພາກສ່ວນ LED ທັງໝົດຕ້ອງຖືກໄຟເປັນເວລາ 4 ວິນາທີ.- ມູນຄ່າຂະບວນການແລະຈຸດທີ່ກໍານົດໄວ້ຊີ້ໃຫ້ເຫັນ.
8.3 ລາຍລະອຽດພາລາມິເຕີ
| ລະຫັດ INDEX | ໄລຍະການປັບຄຳອະທິບາຍ | ** ການຕັ້ງຄ່າເລີ່ມຕົ້ນ | ||
| SV | ຕັ້ງຄ່າການຄວບຄຸມມູນຄ່າຈຸດ * ຂອບເຂດຈໍາກັດຕ່ໍາກັບຄ່າຈໍາກັດສູງ |
ບໍ່ໄດ້ກໍານົດ | ||
| ຄ່າຈຸດປຸກ * ຂອບເຂດຈໍາກັດຕ່ໍາເຖິງສູງສຸດຈໍາກັດ Value. if * 0 ຫາ 3600 ນາທີ (ຖ້າ * ຂີດຈຳກັດຕ່ຳນາທີs ຕັ້ງຈຸດສູງສຸດ ຂີດຈຳກັດລົບຄ່າຈຸດກຳນົດ (ຖ້າ |
200 BC | |||
| Ramp ອັດຕາການຄ່າຂະບວນການເພື່ອຈໍາກັດການປ່ຽນແປງກະທັນຫັນຂອງຂະບວນການ (Soft Start) * 0 ຫາ 200.0 BC (360.0 BF) / ນາທີ (ຖ້າ * 0 ຫາ 3600 ຫນ່ວຍ / ນາທີ (ຖ້າ |
0 BC / ນາທີ. | |||
| ຄ່າຊົດເຊີຍສຳລັບການຣີເຊັດດ້ວຍມື (ຖ້າ |
0.0 % | |||
| Offset shift ສໍາລັບມູນຄ່າຂະບວນການ * -111 BC ຫາ 111 BC |
0 BC | |||
| ແຖບສັດສ່ວນ
* 0 ຫາ 200 BC (ຕັ້ງເປັນ 0 ສໍາລັບການຄວບຄຸມການປິດ) |
10 BC | |||
| Integral (Reset) ເວລາ * 0 ຫາ 3600 ວິນາທີ |
120 ວິ. | |||
| Derivative (ອັດຕາ) ເວລາ * 0 ຫາ 360.0 ວິນາທີ |
30 ວິ. | |||
| ໂໝດທ້ອງຖິ່ນ 0: ບໍ່ມີຕົວກໍານົດການຄວບຄຸມສາມາດປ່ຽນແປງໄດ້ 1: ຕົວກໍານົດການຄວບຄຸມສາມາດປ່ຽນແປງໄດ້ |
1 | |||
| ການເລືອກພາລາມິເຕີ (ອະນຸຍາດໃຫ້ເລືອກພາລາມິເຕີເພີ່ມເຕີມເພື່ອໃຫ້ສາມາດເຂົ້າເຖິງໄດ້ໃນລະດັບ 0 ຄວາມປອດໄພ) |
0 | |||
| ເວລາຮອບວຽນຕາມອັດຕາສ່ວນ * 0 ຫາ 120 ວິນາທີ |
Relay | 20 | ||
| Pulsed Voltage | 1 | |||
| Linear Volt/mA | 0 | |||
| ການເລືອກຮູບແບບການປ້ອນຂໍ້ມູນ 0: J ປະເພດ T/C 6: S ປະເພດ T/C 1: K ປະເພດ T/C 7: N ປະເພດ T/C 2: ປະເພດ T/C 8: PT100 DIN 3: E ປະເພດ T/C 9: PT100 JIS 4: B type T/C 10: Linear Voltage ຫຼືປະຈຸບັນ 5: R ປະເພດ T/C ໝາຍເຫດ: T/C-Close solder gap G5, RTD-Open G5 |
T/C | 0 | ||
| RTD | 8 | |||
| ເສັ້ນ | 10 | |||
| ການເລືອກໂໝດປຸກ 0: ຂະບວນການປຸກສູງ 8: Outband ປຸກ 1: ປະມວນຜົນສັນຍານເຕືອນຕໍ່າ 9: inband ປຸກ 2: Deviation ປຸກສູງ 10: Inhibit Outband Alarm 3: Deviation Low Alarm 11: Inhibit Inband Alarm 4: Inhibit Process High Alarm 12: Alarm Relay OFF as 5: Inhibit Process Low Alarm Dwell Time Out 6: Inhibit deviation High Alarm 13: Alarm Relay ON as 7: Inhibit Deviation Low Alarm Dwell Time Out. |
0 | |||
| Hysteresis ຂອງປຸກ 1 * 0 ຫາ 20% ຂອງ SPAN |
0.5% | |||
| BC / BF ການຄັດເລືອກ 0: BF, 1: BC |
1 | |||
| ຄວາມລະອຽດການເລືອກ 0: ບໍ່ມີຈຸດທົດສະນິຍົມ 2:2 ຕົວເລກທົດສະນິຍົມ 1:1 ຕົວເລກທົດສະນິຍົມ 3:3 ຕົວເລກທົດສະນິຍົມ (2 & 3 ອາດຈະຖືກນໍາໃຊ້ພຽງແຕ່ສໍາລັບ linear voltage ຫຼືປະຈຸບັນ |
0 |
|||
| ການຄວບຄຸມການປະຕິບັດ 0: Direct (Cooling) Action 1: Reverse (Heat) Action |
1 | |||
| ການປ້ອງກັນຄວາມຜິດພາດ 0: ຄວບຄຸມ OFF, ໂມງປຸກ OFF 2: ຄວບຄຸມ ON, ໂມງປຸກ OFF 1: ຄວບຄຸມ OFF, ໂມງປຸກ ON 3: ຄວບຄຸມເປີດ, ໂມງປຸກເປີດ |
1 |
|||
| Hysteresis ສໍາລັບການຄວບຄຸມການເປີດ / ປິດ *0 ຫາ 20% ຂອງ SPAN |
0.5% | |||
| ຂອບເຂດຈໍາກັດຕ່ໍາ | -50 ປີ ກ່ອນ ຄ.ສ | |||
| ຂອບເຂດຈໍາກັດສູງ | 1000 BC | |||
| ຕົວເລກການປັບຕົວຕໍ່າ | 0 BC | |||
| ຕົວເລກການປັບສູງ | 800 BC | |||
ໝາຍເຫດ: * ການປັບລະດັບຂອງພາລາມິເຕີໄດ້
** ການຕັ້ງຄ່າໂຮງງານຜະລິດ. ສັນຍານເຕືອນຂະບວນການແມ່ນຢູ່ໃນຈຸດອຸນຫະພູມຄົງທີ່. ສັນຍານເຕືອນການບ່ຽງເບນເຄື່ອນທີ່ດ້ວຍຄ່າຈຸດທີ່ຕັ້ງໄວ້.
8.4 ການປັບອັດຕະໂນມັດ
- ໃຫ້ແນ່ໃຈວ່າຕົວຄວບຄຸມຖືກຕັ້ງແລະຕິດຕັ້ງຢ່າງຖືກຕ້ອງ.
- ໃຫ້ແນ່ໃຈວ່າແຖບອັດຕາສ່ວນ 'Pb' ບໍ່ໄດ້ຕັ້ງຢູ່ທີ່ '0'.
- ກົດ Return Key ຢ່າງໜ້ອຍ 6 ວິນາທີ (ສູງສຸດ 16 ວິນາທີ). ນີ້ຈະເລີ່ມຕົ້ນຟັງຊັນອັດຕະໂນມັດ. (ເພື່ອຍົກເລີກຂັ້ນຕອນການປັບອັດຕະໂນມັດໃຫ້ກົດ Return Key ແລະປ່ອຍ).
- ຈຸດທົດສະນິຍົມຢູ່ມຸມຂວາມືລຸ່ມຂອງຈໍສະແດງຜົນ PV ຈະກະພິບເພື່ອຊີ້ບອກວ່າການປັບອັດຕະໂນມັດກຳລັງດຳເນີນຢູ່. ການປັບແຕ່ງອັດຕະໂນມັດແມ່ນສຳເລັດເມື່ອການກະພິບຢຸດ.
- ອີງຕາມຂະບວນການສະເພາະ, ການປັບອັດຕະໂນມັດອາດຈະໃຊ້ເວລາເຖິງສອງຊົ່ວໂມງ. ຂະບວນການທີ່ມີເວລາຊັກຊ້າຈະໃຊ້ເວລາດົນທີ່ສຸດເພື່ອປບັ. ຈືຂໍ້ມູນການ, ໃນຂະນະທີ່ຈຸດສະແດງກະພິບຕົວຄວບຄຸມແມ່ນການປັບອັດຕະໂນມັດ.
ໝາຍເຫດ: ຖ້າຫາກວ່າຄວາມຜິດພາດ AT ( ![]() ) ເກີດຂຶ້ນ, ຂະບວນການປັບອັດຕະໂນມັດຖືກຍົກເລີກເນື່ອງຈາກລະບົບປະຕິບັດງານຢູ່ໃນການຄວບຄຸມ ON-OFF (PB=0).
) ເກີດຂຶ້ນ, ຂະບວນການປັບອັດຕະໂນມັດຖືກຍົກເລີກເນື່ອງຈາກລະບົບປະຕິບັດງານຢູ່ໃນການຄວບຄຸມ ON-OFF (PB=0).
ຂະບວນການດັ່ງກ່າວຍັງຈະຖືກຍົກເລີກຖ້າຈຸດທີ່ກໍານົດໄວ້ແມ່ນຕັ້ງຢູ່ໃກ້ກັບອຸນຫະພູມຂອງຂະບວນການຫຼືຖ້າມີຄວາມອາດສາມາດບໍ່ພຽງພໍໃນລະບົບທີ່ຈະໄປເຖິງຈຸດທີ່ກໍານົດໄວ້ (ເຊັ່ນ: ພະລັງງານຄວາມຮ້ອນບໍ່ພຽງພໍ). ເມື່ອສໍາເລັດການປັບແຕ່ງອັດຕະໂນມັດ, ການຕັ້ງຄ່າ PID ໃຫມ່ຈະຖືກປ້ອນເຂົ້າໄປໃນຫນ່ວຍຄວາມຈໍາທີ່ບໍ່ມີການລະເຫີຍຂອງຕົວຄວບຄຸມໂດຍອັດຕະໂນມັດ.
8.5 ການປັບ PID ຄູ່ມື
ໃນຂະນະທີ່ຟັງຊັນການປັບອັດຕະໂນມັດເລືອກການຕັ້ງຄ່າການຄວບຄຸມທີ່ຄວນພິສູດວ່າຫນ້າພໍໃຈສໍາລັບຂະບວນການສ່ວນໃຫຍ່, ທ່ານອາດຈະເຫັນວ່າມັນເປັນສິ່ງຈໍາເປັນທີ່ຈະປັບປ່ຽນການຕັ້ງຄ່າເຫຼົ່ານີ້ຕາມລໍາດັບ. ນີ້ອາດຈະເປັນກໍລະນີຖ້າມີການປ່ຽນແປງບາງຢ່າງໃນຂະບວນການຫຼືຖ້າທ່ານຕ້ອງການ "ປັບ" ການຕັ້ງຄ່າການຄວບຄຸມ.
ມັນເປັນສິ່ງສໍາຄັນກ່ອນທີ່ຈະເຮັດການປ່ຽນແປງການຕັ້ງຄ່າການຄວບຄຸມທີ່ທ່ານບັນທຶກການຕັ້ງຄ່າປະຈຸບັນສໍາລັບການອ້າງອີງໃນອະນາຄົດ. ເຮັດການປ່ຽນແປງເລັກນ້ອຍຕໍ່ກັບການຕັ້ງຄ່າດຽວຕໍ່ຄັ້ງ ແລະສັງເກດຜົນໄດ້ຮັບໃນຂະບວນການ. ເນື່ອງຈາກວ່າແຕ່ລະການຕັ້ງຄ່າພົວພັນກັບກັນແລະກັນ, ມັນງ່າຍທີ່ຈະສັບສົນກັບຜົນໄດ້ຮັບຖ້າທ່ານບໍ່ຄຸ້ນເຄີຍກັບຂະບວນການຄວບຄຸມຂະບວນການ.
Tuning ຄູ່ມື
ແຖບສັດສ່ວນ
| ອາການ | ການແກ້ໄຂ |
| ຕອບສະໜອງຊ້າ | ຫຼຸດຄ່າ PB |
| ຍອດສູງ ຫຼື Oscillations | ເພີ່ມມູນຄ່າ PB |
Integral Time (ຣີເຊັດ)
| ອາການ | ການແກ້ໄຂ |
| ຕອບສະໜອງຊ້າ | ຫຼຸດເວລາລວມ |
| ຄວາມບໍ່ສະຖຽນລະພາບ ຫຼືການສັ່ນສະເທືອນ | ເພີ່ມເວລາລວມ |
ເວລາສືບພັນ (ອັດຕາ)
| ອາການ | ການແກ້ໄຂ |
| ການຕອບສະຫນອງຊ້າຫຼື Oscillations | ຫຼຸດລົງ Deriv. ເວລາ |
| Overshoot ສູງ | ເພີ່ມ Deriv. ເວລາ |
8.6 ຂັ້ນຕອນການປັບດ້ວຍມື
ຂັ້ນຕອນທີ 1: ປັບຄ່າປະສົມປະສານແລະສະກຸນເປັນ 0. ນີ້ລະບຸອັດຕາການແລະການຕັ້ງຄ່າຄືນໃຫມ່
ຂັ້ນຕອນທີ 2: ກໍານົດມູນຄ່າ arbitrary ຂອງແຖບອັດຕາສ່ວນແລະຕິດຕາມກວດກາຜົນໄດ້ຮັບການຄວບຄຸມ
ຂັ້ນຕອນທີ 3: ຖ້າຫາກວ່າການຕັ້ງຄ່າຕົ້ນສະບັບແນະນໍາ oscillation ຂະບວນການຂະຫນາດໃຫຍ່, ຫຼັງຈາກນັ້ນຄ່ອຍໆເພີ່ມແຖບອັດຕາສ່ວນຈົນກ່ວາວົງຈອນສະຫມໍ່າສະເຫມີເກີດຂຶ້ນ. ບັນທຶກມູນຄ່າແຖບອັດຕາສ່ວນນີ້ (Pc).
ຂັ້ນຕອນທີ 4: ການວັດແທກໄລຍະເວລາຂອງການຂີ່ລົດຖີບສະຫມໍ່າສະເຫມີ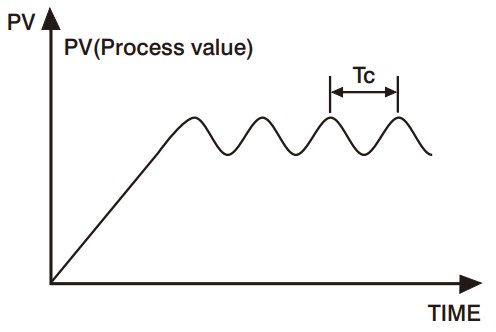 ບັນທຶກຄ່ານີ້ (Tc) ໃນວິນາທີ
ບັນທຶກຄ່ານີ້ (Tc) ໃນວິນາທີ
ຂັ້ນຕອນທີ 5: ການຕັ້ງຄ່າການຄວບຄຸມໄດ້ຖືກກໍານົດດັ່ງຕໍ່ໄປນີ້:
ແຖບອັດຕາສ່ວນ (PB) = 1.7 Pc
Integral Time (TI)=0.5 Tc
Derivative Time(TD)=0.125 Tc
8.7 ຣAMP & DWELL
ຕົວຄວບຄຸມ BTC-9090 ສາມາດຖືກຕັ້ງຄ່າໃຫ້ເຮັດຫນ້າທີ່ເປັນຕົວຄວບຄຸມຈຸດທີ່ກໍານົດໄວ້ຄົງທີ່ຫຼືເປັນ r ດຽວ.amp ຄວບຄຸມການເປີດພະລັງງານ. ຟັງຊັນນີ້ເຮັດໃຫ້ຜູ້ໃຊ້ສາມາດກໍານົດ r ທີ່ກໍານົດໄວ້ກ່ອນamp ອັດຕາເພື່ອໃຫ້ຂະບວນການຄ່ອຍໆບັນລຸອຸນຫະພູມຈຸດທີ່ກໍານົດໄວ້, ດັ່ງນັ້ນຈຶ່ງຜະລິດຟັງຊັນ 'Soft Start'.
ເຄື່ອງຈັບເວລາ dwell ຖືກລວມເຂົ້າພາຍໃນ BTC-9090 ແລະ relay ປຸກສາມາດຖືກຕັ້ງຄ່າເພື່ອໃຫ້ມີຟັງຊັນທີ່ຢູ່ອາໃສທີ່ຈະໃຊ້ຮ່ວມກັນກັບ r.amp ຫນ້າທີ່.
ຣamp ອັດຕາຖືກ ກຳ ນົດໂດຍ ' ![]() ' ຕົວກໍານົດການທີ່ສາມາດປັບໄດ້ໃນໄລຍະ 0 ຫາ 200.0 BC/ນາທີ. ຣamp ຟັງຊັນອັດຕາແມ່ນຖືກປິດໃຊ້ງານເມື່ອ '
' ຕົວກໍານົດການທີ່ສາມາດປັບໄດ້ໃນໄລຍະ 0 ຫາ 200.0 BC/ນາທີ. ຣamp ຟັງຊັນອັດຕາແມ່ນຖືກປິດໃຊ້ງານເມື່ອ ' ![]() ' ພາຣາມິເຕີຖືກຕັ້ງເປັນ ' 0 '.
' ພາຣາມິເຕີຖືກຕັ້ງເປັນ ' 0 '.
ຟັງຊັນການແຊ່ໄດ້ຖືກເປີດໃຊ້ໂດຍການຕັ້ງຄ່າຜົນຜະລິດປຸກເພື່ອເຮັດຫນ້າທີ່ເປັນຕົວຈັບເວລາທີ່ຢູ່ອາໃສ. ພາລາມິເຕີ ![]() ຈໍາເປັນຕ້ອງໄດ້ຕັ້ງເປັນຄ່າ 12. ການຕິດຕໍ່ປຸກໃນປັດຈຸບັນຈະດໍາເນີນການເປັນຕົວຕິດຕໍ່ຈັບເວລາ, ໂດຍທີ່ຕິດຕໍ່ພົວພັນໄດ້ຖືກປິດໃນເວລາທີ່ເປີດແລະເປີດຫຼັງຈາກທີ່ໃຊ້ເວລາຜ່ານໄປທີ່ກໍານົດໄວ້ໃນພາລາມິເຕີ.
ຈໍາເປັນຕ້ອງໄດ້ຕັ້ງເປັນຄ່າ 12. ການຕິດຕໍ່ປຸກໃນປັດຈຸບັນຈະດໍາເນີນການເປັນຕົວຕິດຕໍ່ຈັບເວລາ, ໂດຍທີ່ຕິດຕໍ່ພົວພັນໄດ້ຖືກປິດໃນເວລາທີ່ເປີດແລະເປີດຫຼັງຈາກທີ່ໃຊ້ເວລາຜ່ານໄປທີ່ກໍານົດໄວ້ໃນພາລາມິເຕີ.![]() .
.
ຖ້າການສະຫນອງພະລັງງານຫຼືຜົນຜະລິດຂອງຕົວຄວບຄຸມແມ່ນສາຍຜ່ານຕົວຕິດຕໍ່ສັນຍານເຕືອນ, ຕົວຄວບຄຸມຈະເຮັດວຽກເປັນຕົວຄວບຄຸມແຊ່ທີ່ຮັບປະກັນ.
ໃນ example ຂ້າງລຸ່ມນີ້ Ramp ອັດຕາຖືກຕັ້ງເປັນ 5 BC/ນາທີ, ![]() = 12 ແລະ
= 12 ແລະ ![]() =15 (ນາທີ). ພະລັງງານຖືກນໍາໃຊ້ໃນເວລາທີ່ສູນແລະຂະບວນການປີນຂຶ້ນຢູ່ທີ່ 5 BC / ນາທີເຖິງຈຸດທີ່ກໍານົດໄວ້ຂອງ 125 BC. ເມື່ອເຖິງຈຸດທີ່ຕັ້ງໄວ້, ເຄື່ອງຈັບເວລາທີ່ຢູ່ອາໃສຖືກເປີດໃຊ້ງານແລະຫຼັງຈາກເວລາແຊ່ 15 ນາທີ, ສັນຍານເຕືອນໄພຈະເປີດ, ປິດການສົ່ງອອກ. ອຸນຫະພູມຂະບວນການສຸດທ້າຍຈະຫຼຸດລົງໃນອັດຕາທີ່ບໍ່ໄດ້ກໍານົດ.
=15 (ນາທີ). ພະລັງງານຖືກນໍາໃຊ້ໃນເວລາທີ່ສູນແລະຂະບວນການປີນຂຶ້ນຢູ່ທີ່ 5 BC / ນາທີເຖິງຈຸດທີ່ກໍານົດໄວ້ຂອງ 125 BC. ເມື່ອເຖິງຈຸດທີ່ຕັ້ງໄວ້, ເຄື່ອງຈັບເວລາທີ່ຢູ່ອາໃສຖືກເປີດໃຊ້ງານແລະຫຼັງຈາກເວລາແຊ່ 15 ນາທີ, ສັນຍານເຕືອນໄພຈະເປີດ, ປິດການສົ່ງອອກ. ອຸນຫະພູມຂະບວນການສຸດທ້າຍຈະຫຼຸດລົງໃນອັດຕາທີ່ບໍ່ໄດ້ກໍານົດ.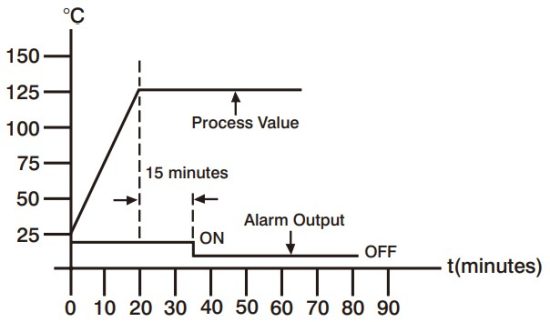 ຟັງຊັນ dwell ອາດຈະຖືກນໍາໃຊ້ເພື່ອດໍາເນີນການອຸປະກອນພາຍນອກເຊັ່ນ: siren ເພື່ອແຈ້ງເຕືອນເມື່ອເຖິງເວລາແຊ່ນ້ໍາ.
ຟັງຊັນ dwell ອາດຈະຖືກນໍາໃຊ້ເພື່ອດໍາເນີນການອຸປະກອນພາຍນອກເຊັ່ນ: siren ເພື່ອແຈ້ງເຕືອນເມື່ອເຖິງເວລາແຊ່ນ້ໍາ.
ຈໍາເປັນຕ້ອງໄດ້ຕັ້ງເປັນຄ່າ 13. ການຕິດຕໍ່ປຸກໃນປັດຈຸບັນຈະດໍາເນີນການເປັນຕົວຕິດຕໍ່ຈັບເວລາ, ດ້ວຍການຕິດຕໍ່ຈະເປີດຢູ່ໃນການເລີ່ມຕົ້ນເລີ່ມຕົ້ນ. ໂມງຈັບເວລາເລີ່ມນັບລົງເມື່ອອຸນຫະພູມຈຸດທີ່ຕັ້ງໄວ້ແລ້ວ. ຫຼັງຈາກການຕັ້ງຄ່າທີ່ຫມົດໄປ, ການຕິດຕໍ່ປຸກໄດ້ປິດ.
ຂໍ້ຄວາມຜິດພາດ
| ອາການ | ສາເຫດ | ວິທີແກ້ໄຂ |
| ເຊັນເຊີຜິດພາດ | ປ່ຽນ RTD ຫຼືເຊັນເຊີ ໃຊ້ການດໍາເນີນງານຮູບແບບຄູ່ມື |
|
| ການສະແດງຂະບວນການເກີນຈຸດທີ່ກໍານົດໄວ້ໃນລະດັບຕ່ໍາ | ປັບຄ່າຄືນໃໝ່ | |
| ການສະແດງຂະບວນການເກີນຂອບເຂດທີ່ກໍານົດໄວ້ໃນລະດັບສູງ | ປັບຄ່າຄືນໃໝ່ | |
| ຄວາມເສຍຫາຍຂອງໂມດູນປະສົມອະນາລັອກ | ແທນທີ່ໂມດູນ. ກວດເບິ່ງແຫຼ່ງທີ່ມາຂອງຄວາມເສຍຫາຍພາຍນອກເຊັ່ນ: transient voltage ຮວງ | |
| ການດໍາເນີນງານບໍ່ຖືກຕ້ອງຂອງຂັ້ນຕອນການປັບອັດຕະໂນມັດ Prop ແຖບຕັ້ງເປັນ 0 | ເຮັດຊ້ໍາຂັ້ນຕອນ. ເພີ່ມແຖບ prop. ເປັນຕົວເລກທີ່ໃຫຍ່ກວ່າ 0 | |
| ໂໝດຄູ່ມືແມ່ນບໍ່ອະນຸຍາດໃຫ້ໃຊ້ກັບລະບົບຄວບຄຸມການເປີດ-ປິດ | ເພີ່ມແຖບອັດຕາສ່ວນ | |
| ກວດສອບຄວາມຜິດພາດ, ຄ່າໃນຫນ່ວຍຄວາມຈໍາອາດຈະມີການປ່ຽນແປງໂດຍບັງເອີນ | ກວດເບິ່ງແລະປັບຄ່າຕົວກໍານົດການຄວບຄຸມຄືນໃຫມ່ |
ຄໍາແນະນໍາເພີ່ມເຕີມສໍາລັບສະບັບໃຫມ່
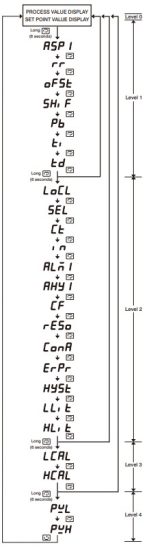
ຫນ່ວຍບໍລິການທີ່ມີເຟີມແວເວີຊັ່ນ V3.7 ມີສອງຕົວກໍານົດການເພີ່ມເຕີມ - "PVL" ແລະ "PVH" ທີ່ຢູ່ໃນລະດັບ 4 ເປັນຕາຕະລາງການໄຫຼຂອງພາລາມິເຕີຢູ່ເບື້ອງຊ້າຍມື.
ເມື່ອທ່ານຕ້ອງການປ່ຽນຄ່າ LLit ເປັນມູນຄ່າທີ່ສູງກວ່າຫຼືປ່ຽນຄ່າ HLit ເປັນມູນຄ່າຕ່ໍາ, ຂັ້ນຕອນຕໍ່ໄປນີ້ຈະຕ້ອງປະຕິບັດຕາມເພື່ອເຮັດໃຫ້ຄ່າ PVL ເທົ່າກັບຫນຶ່ງສ່ວນສິບຂອງຄ່າ LCAL ແລະ PVH alue ເທົ່າກັບຫນຶ່ງສ່ວນສິບຂອງຄ່າ HCAL. ຖ້າບໍ່ດັ່ງນັ້ນ, ຄ່າຂອງຂະບວນການທີ່ວັດແທກໄດ້ຈະຢູ່ນອກສະເພາະ.
- ໃຊ້ປຸ່ມເລື່ອນຈົນກ່ວາ "LLit" ປາກົດຢູ່ໃນຈໍສະແດງຜົນ PV. ໃຊ້ປຸ່ມຂຶ້ນແລະລົງເພື່ອກໍານົດຄ່າ LLit ເປັນມູນຄ່າສູງກວ່າຄ່າຕົ້ນສະບັບ.
- ກົດແລະປ່ອຍປຸ່ມເລື່ອນ, ຫຼັງຈາກນັ້ນ "HLit" ປາກົດຢູ່ໃນ PV Display. ໃຊ້ປຸ່ມຂຶ້ນ ແລະລົງເພື່ອຕັ້ງຄ່າ HLit ເປັນຄ່າຕໍ່າກວ່າຄ່າເດີມ.
- ປິດ ແລະ ເປີດ.
- ໃຊ້ປຸ່ມເລື່ອນຈົນກ່ວາ “LCAL” ປາກົດຢູ່ໃນຈໍສະແດງຜົນ PV. ເອົາບັນທຶກກ່ຽວກັບຄ່າ LCAL.
- ກົດແລະປ່ອຍປຸ່ມເລື່ອນ, ຫຼັງຈາກນັ້ນ "HCAL" ປາກົດຢູ່ໃນ PV Display. ເອົາບັນທຶກກ່ຽວກັບຄ່າ HCAL.
- ກົດປຸ່ມເລື່ອນຢ່າງໜ້ອຍ 6 ວິນາທີແລ້ວປ່ອຍ, “PVL” ຈະປາກົດຢູ່ໃນຈໍສະແດງຜົນ PV. ໃຊ້ປຸ່ມຂຶ້ນ ແລະລົງເພື່ອກຳນົດຄ່າ PVL ເປັນໜຶ່ງສ່ວນສິບຂອງຄ່າ LCAL.
- ກົດແລະປ່ອຍປຸ່ມເລື່ອນ, "PVH" ປາກົດຢູ່ໃນ PV Display. ໃຊ້ປຸ່ມຂຶ້ນ ແລະລົງເພື່ອຕັ້ງຄ່າ PVH ເປັນໜຶ່ງສ່ວນສິບຂອງຄ່າ HCAL.
- ກະລຸນາຕິດຕັ້ງ breaker 20A ໃນທ້າຍການສະຫນອງພະລັງງານ
- ເພື່ອເອົາຝຸ່ນອອກ, ກະລຸນາໃຊ້ຜ້າແຫ້ງ
- ການຕິດຕັ້ງທີ່ຄວາມປອດໄພຂອງລະບົບການປະກອບອຸປະກອນໃດຫນຶ່ງແມ່ນຄວາມຮັບຜິດຊອບຂອງການປະກອບຂອງລະບົບໄດ້
- ຖ້າອຸປະກອນຖືກໃຊ້ໃນລັກສະນະທີ່ຜູ້ຜະລິດບໍ່ໄດ້ລະບຸ, ການປ້ອງກັນທີ່ສະຫນອງໂດຍອຸປະກອນອາດຈະມີຄວາມບົກຜ່ອງ
ຢ່າປົກປິດຊ່ອງລະບາຍຄວາມເຢັນເພື່ອຮັກສາກະແສລົມ
ລະວັງບໍ່ໃຫ້ແໜ້ນສະກູປາຍເຄື່ອງ. ແຮງບິດບໍ່ຄວນເກີນ. 1 14 Nm (10 Lb-in ຫຼື 11.52 KgF-cm), ອຸນຫະພູມຕໍ່າສຸດ 60°C, ໃຊ້ຕົວນໍາທອງແດງເທົ່ານັ້ນ.
ຍົກເວັ້ນສາຍສາຍ thermocouple, ສາຍໄຟທັງຫມົດຄວນໃຊ້ຕົວນໍາທອງແດງທີ່ຕິດຢູ່ກັບເຄື່ອງວັດແທກສູງສຸດ 18 AWG.
ການຮັບປະກັນ
Brainchild Electronic Co., Ltd ມີຄວາມຍິນດີທີ່ຈະໃຫ້ຄໍາແນະນໍາກ່ຽວກັບການນໍາໃຊ້ຜະລິດຕະພັນຕ່າງໆ.
ຢ່າງໃດກໍຕາມ, Brainchild ບໍ່ມີການຮັບປະກັນຫຼືການເປັນຕົວແທນຂອງປະເພດໃດໆກ່ຽວກັບຄວາມສອດຄ່ອງສໍາລັບການນໍາໃຊ້, ຫຼືຄໍາຮ້ອງສະຫມັກຂອງຜະລິດຕະພັນຂອງຕົນໂດຍຜູ້ຊື້. ການຄັດເລືອກ, ຄໍາຮ້ອງສະຫມັກຫຼືການນໍາໃຊ້ຜະລິດຕະພັນ Brainchild ແມ່ນຄວາມຮັບຜິດຊອບຂອງຜູ້ຊື້. ບໍ່ມີການຮຽກຮ້ອງໃດໆທີ່ຈະອະນຸຍາດໃຫ້ສໍາລັບຄວາມເສຍຫາຍຫຼືການສູນເສຍ, ບໍ່ວ່າຈະໂດຍກົງ, ທາງອ້ອມ, ໂດຍບັງເອີນ, ພິເສດຫຼືຜົນສະທ້ອນ. ຂໍ້ມູນຈໍາເພາະແມ່ນມີການປ່ຽນແປງໂດຍບໍ່ມີການແຈ້ງການ. ນອກຈາກນັ້ນ, Brainchild ສະຫງວນສິດທີ່ຈະເຮັດການປ່ຽນແປງ - ໂດຍບໍ່ມີການແຈ້ງໃຫ້ຜູ້ຊື້ - ໄປຫາວັດສະດຸຫຼືການປຸງແຕ່ງທີ່ບໍ່ມີຜົນກະທົບຕໍ່ການປະຕິບັດຕາມຂໍ້ກໍານົດທີ່ກ່ຽວຂ້ອງ. ຜະລິດຕະພັນຂອງ Brainchild ໄດ້ຮັບການຮັບປະກັນວ່າບໍ່ມີຂໍ້ບົກພ່ອງຂອງວັດສະດຸແລະຝີມືສໍາລັບ 18 ເດືອນຫຼັງຈາກການຈັດສົ່ງໃຫ້ຜູ້ຊື້ຄັ້ງທໍາອິດເພື່ອນໍາໃຊ້. ໄລຍະເວລາຂະຫຍາຍສາມາດໃຊ້ໄດ້ໂດຍມີຄ່າໃຊ້ຈ່າຍເພີ່ມເຕີມຕາມການຮ້ອງຂໍ. ຄວາມຮັບຜິດຊອບແຕ່ພຽງຜູ້ດຽວຂອງ Brainchild ພາຍໃຕ້ການຮັບປະກັນນີ້, ຢູ່ທາງເລືອກຂອງ Brainchild, ຈໍາກັດພຽງແຕ່ການທົດແທນຫຼືການສ້ອມແປງ, ບໍ່ເສຍຄ່າໃຊ້ຈ່າຍ, ຫຼືການຄືນເງິນຂອງລາຄາຊື້ພາຍໃນໄລຍະເວລາຮັບປະກັນທີ່ລະບຸໄວ້. ການຮັບປະກັນນີ້ບໍ່ໄດ້ນໍາໃຊ້ກັບຄວາມເສຍຫາຍທີ່ເກີດຈາກການຂົນສົ່ງ, ການປ່ຽນແປງ, ການໃຊ້ໃນທາງທີ່ຜິດຫຼືການລ່ວງລະເມີດ.
ສົ່ງຄືນ
ບໍ່ມີການສົ່ງຄືນຜະລິດຕະພັນໃດໆທີ່ສາມາດຍອມຮັບໄດ້ໂດຍບໍ່ມີແບບຟອມການອະນຸມັດວັດສະດຸຄືນທີ່ສໍາເລັດ (RMA).
ໝາຍເຫດ:
ຂໍ້ມູນໃນຄູ່ມືຜູ້ໃຊ້ນີ້ອາດມີການປ່ຽນແປງໂດຍບໍ່ມີການແຈ້ງລ່ວງໜ້າ.
ສະຫງວນລິຂະສິດ 2023, The Brainchild Electronic Co., Ltd., ສະຫງວນລິຂະສິດທັງໝົດ. ບໍ່ມີສ່ວນຫນຶ່ງຂອງສິ່ງພິມນີ້ອາດຈະຖືກຜະລິດຄືນ, ຖ່າຍທອດ, ຖອດຂໍ້ຄວາມຫຼືເກັບຮັກສາໄວ້ໃນລະບົບການດຶງຂໍ້ມູນ, ຫຼືແປເປັນພາສາໃດກໍ່ຕາມໃນຮູບແບບໃດກໍ່ຕາມໂດຍບໍ່ມີການອະນຸຍາດເປັນລາຍລັກອັກສອນຈາກ Brainchild Electronic Co., Ltd.
![]() ສໍາລັບຄວາມຕ້ອງການສ້ອມແປງຫຼືບໍາລຸງຮັກສາໃດໆ, ກະລຸນາຕິດຕໍ່ພວກເຮົາ.
ສໍາລັບຄວາມຕ້ອງການສ້ອມແປງຫຼືບໍາລຸງຮັກສາໃດໆ, ກະລຸນາຕິດຕໍ່ພວກເຮົາ.
ບໍລິສັດ ເອເລັກໂຕຣນິກ ຈຳກັດ.
ເລກທີ 209, ຖະໜົນຈຸ່ງຢາງ, ເມືອງນານກວາງ,
Taipei 11573, ໄຕ້ຫວັນ
ໂທ: 886-2-27861299
ແຟັກ: 886-2-27861395
web ເວັບໄຊ: http://www.brainchildtw.com![]()
ເອກະສານ / ຊັບພະຍາກອນ
 |
BrainChild BTC-9090 Fuzzy Logic Micro Processor Based Controller [pdf] ຄູ່ມືການສອນ BTC-9090, BTC-9090 G UL, BTC-9090 Fuzzy Logic Micro Processor Based Controller, Fuzzy Logic Micro Processor Based Controller, Micro Processor Based Controller, Processor Based Controller, Based Controller |