![]() Bộ điều khiển dựa trên vi xử lý logic mờ BTC-9090
Bộ điều khiển dựa trên vi xử lý logic mờ BTC-9090
Hướng dẫn sử dụng
GIỚI THIỆU
Sách hướng dẫn này chứa thông tin về việc lắp đặt và vận hành bộ điều khiển dựa trên vi xử lý logic mờ Brainchild model BTC-9090.
Logic mờ là một tính năng thiết yếu của bộ điều khiển đa năng này. Mặc dù điều khiển PID đã được các ngành công nghiệp chấp nhận rộng rãi, nhưng điều khiển PID khó có thể hoạt động hiệu quả với một số hệ thống phức tạp, ví dụamphệ thống bậc hai, độ trễ thời gian dài, nhiều điểm đặt khác nhau, nhiều tải khác nhau, v.v. Do bất lợitage của các nguyên lý điều khiển và các giá trị cố định của điều khiển PID, việc điều khiển các hệ thống có nhiều loại là không hiệu quả và kết quả rõ ràng là gây khó chịu cho một số hệ thống. Điều khiển Logic mờ khắc phục được nhược điểmtage của điều khiển PID, nó điều khiển hệ thống theo cách hiệu quả bằng những kinh nghiệm đã có trước đó. Chức năng của Logic mờ là điều chỉnh các giá trị PID một cách gián tiếp để làm cho giá trị đầu ra của thao tác MV điều chỉnh linh hoạt và nhanh chóng thích ứng với các quy trình khác nhau. Bằng cách này, nó cho phép một quy trình đạt đến điểm đặt trước trong thời gian ngắn nhất với sự vượt mức tối thiểu trong quá trình điều chỉnh hoặc nhiễu bên ngoài. Khác với điều khiển PID với thông tin kỹ thuật số, Logic mờ là điều khiển với thông tin ngôn ngữ.
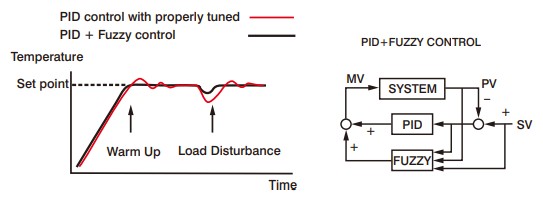
Ngoài ra, dụng cụ này có chức năng đơn lẻtagờamp và chế độ dừng, tự động điều chỉnh và thực hiện thủ công. Dễ sử dụng cũng là một tính năng thiết yếu của nó.
HỆ THỐNG ĐÁNH SỐ
Số hiệu mẫu ![]() (1) Đầu vào nguồn điện
(1) Đầu vào nguồn điện
| 4 | 90-264VAC |
| 5 | 20-32VAC/VDC |
| 9 | Khác |
(2) Đầu vào tín hiệu
1 0 – 5V 3 PT100 DIN 5 TC 7 0 – 20mA 8 0 – 10V
(3) Mã phạm vi
| 1 | Có thể cấu hình |
| 9 | Khác |
(4) Chế độ điều khiển
| 3 | Điều khiển PID / BẬT-TẮT |
(5) Tùy chọn đầu ra 1
| 0 | Không có |
| 1 | Rơ le định mức 2A/240VAC điện trở |
| 2 | SSR Drive được đánh giá 20mA/24V |
| 3 | 4-20mA tuyến tính, tải tối đa 500 ohms (Module OM93-1) |
| 4 | 0-20mA tuyến tính, tải tối đa 500 ohms (Module OM93-2) |
| 5 | 0-10V tuyến tính, trở kháng tối thiểu 500K ohms (Mô-đun OM93-3) |
| 9 | Khác |
(6) Tùy chọn đầu ra 2
| 0 | Không có |
(7) Tùy chọn báo động
| 0 | Không có |
| 1 | Rơ le định mức 2A/240VAC điện trở |
| 9 | Khác |
(8) Giao tiếp
| 0 | Không có |
MÔ TẢ BẢNG TRƯỚC
 PHẠM VI ĐẦU VÀO & ĐỘ CHÍNH XÁC
PHẠM VI ĐẦU VÀO & ĐỘ CHÍNH XÁC
| IN | Cảm biến | Kiểu đầu vào | Phạm vi (BC) | Sự chính xác |
| 0 | J | Sắt-Constantan | -50 đến 999 TCN | A2 TCN |
| 1 | K | Chromel-Alumel | -50 đến 1370 TCN | A2 TCN |
| 2 | T | Đồng-Constantan | -270 đến 400 TCN | A2 TCN |
| 3 | E | Chromel-Constantan | -50 đến 750 TCN | A2 TCN |
| 4 | B | Độ ẩm tương đối 30%/Độ ẩm tương đối 6% | 300 đến 1800 TCN | A3 TCN |
| 5 | R | Độ ẩm 13%/Độ ẩm | 0 đến 1750 TCN | A2 TCN |
| 6 | S | Độ ẩm 10%/Độ ẩm | 0 đến 1750 TCN | A2 TCN |
| 7 | N | Nicrosil-Nisil | -50 đến 1300 TCN | A2 TCN |
| 8 | RTD | PT100 ohm (DIN) | -200 đến 400 TCN | A0.4 TCN |
| 9 | RTD | PT100 ohm (JIS) | -200 đến 400 TCN | A0.4 TCN |
| 10 | Tuyến tính | -10mV đến 60mV | -1999 đến 9999 | A0.05% |
THÔNG SỐ KỸ THUẬT
ĐẦU VÀO
| Cặp nhiệt điện (T/C): | loại J, K, T, E, B, R, S, N. |
| RTD: | PT100 ohm RTD (DIN 43760/BS1904 hoặc JIS) |
| Tuyến tính: | -10 đến 60 mV, suy giảm đầu vào có thể cấu hình |
| Phạm vi: | Người dùng có thể cấu hình, tham khảo Bảng trên |
| Sự chính xác: | Tham khảo Bảng trên |
| Bồi thường mối nối lạnh: | 0.1 BC/ BC môi trường điển hình |
| Bảo vệ cảm biến bị hỏng: | Chế độ bảo vệ có thể cấu hình |
| Sức cản bên ngoài: | Tối đa 100 ohm. |
| Từ chối chế độ bình thường: | 60 dB |
| Từ chối chế độ chung: | 120dB |
| Sample Tỷ lệ: | 3 lần / giây |
ĐIỀU KHIỂN
| Dải tỷ lệ: | 0 – 200 TCN (0-360BF) |
| Đặt lại (Tích phân): | 0 – 3600 giây |
| Tỷ lệ ( Đạo hàm ): | 0 – 1000 giây |
| Ramp Tỷ lệ: | 0 – 200.0 BC /phút (0 – 360.0 BF /phút) |
| Dừng lại: | 0 – 3600 phút |
| BẬT-TẮT: | Với độ trễ có thể điều chỉnh (0-20% SPAN) |
| Thời gian chu kỳ: | 0-120 giây |
| Hành động kiểm soát: | Trực tiếp (để làm mát) và ngược lại (để sưởi ấm) |
| QUYỀN LỰC | 90-264VAC, 50/60Hz 10VA 20-32VDC/VAC, 50/60Hz 10VA |
MÔI TRƯỜNG & VẬT LÝ
| Sự an toàn: | UL 61010-1, Phiên bản thứ 3. CAN/CSA-C22.2 No. 61010-1(2012-05), Phiên bản thứ 3. |
| Khí thải EMC: | EN50081-1 |
| Miễn dịch EMC: | EN50082-2 |
| Nhiệt độ hoạt động: | -10 đến 50 TCN |
| Độ ẩm: | 0 đến 90% RH (không mã hóa) |
| Cách nhiệt: | Tối thiểu 20M ohm (500 VDC) |
| Phân tích: | AC 2000V, 50/60 Hz, 1 phút |
| Rung động: | 10 – 55 Hz, ampánh sáng 1 mm |
| Sốc: | 200 m/giây ( 20g ) |
| Khối lượng tịnh: | 170 gram |
| Vật liệu nhà ở: | Nhựa Poly-Carbonate |
| Độ cao: | Dưới 2000 m |
| Sử dụng trong nhà | |
| quá mứctage Thể loại | II |
| Mức độ ô nhiễm: | 2 |
| Biến động điện áp đầu vào: | 10% của khối lượng danh nghĩatage |
CÀI ĐẶT
6.1 KÍCH THƯỚC & KHUNG CẮT TẤM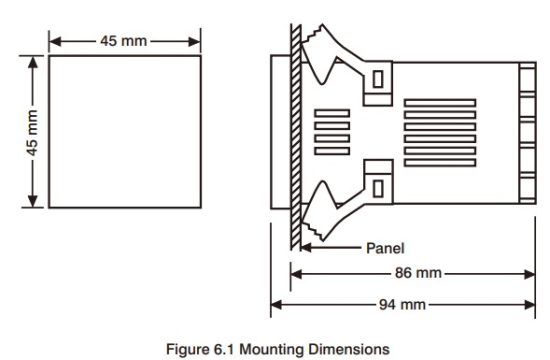 SƠ ĐỒ DÂY 6.2
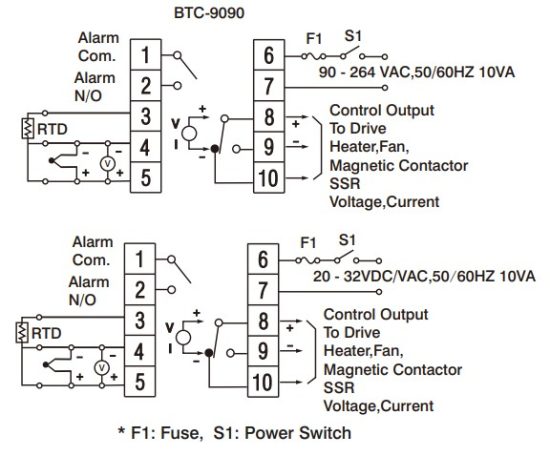
SƠ ĐỒ DÂY 6.2
TÍNH TOÁN
Ghi chú: Không tiến hành phần này trừ khi có nhu cầu thực sự cần hiệu chuẩn lại bộ điều khiển. Tất cả các ngày hiệu chuẩn trước đó sẽ bị mất. Không cố gắng hiệu chuẩn lại trừ khi bạn có thiết bị hiệu chuẩn phù hợp. Nếu dữ liệu hiệu chuẩn bị mất, bạn sẽ cần trả lại bộ điều khiển cho nhà cung cấp của mình, họ có thể tính phí hiệu chuẩn lại.
Trước khi hiệu chuẩn, hãy đảm bảo rằng tất cả các cài đặt thông số đều chính xác (loại đầu vào, C/F, độ phân giải, phạm vi thấp, phạm vi cao).
- Tháo dây đầu vào cảm biến và kết nối bộ mô phỏng đầu vào tiêu chuẩn đúng loại với đầu vào bộ điều khiển. Xác minh cực tính chính xác. Đặt tín hiệu mô phỏng trùng với tín hiệu quy trình thấp (ví dụ: không độ).
- Sử dụng phím cuộn cho đến khi ”
 ” xuất hiện trên Màn hình PV. (Tham khảo 8.2)
” xuất hiện trên Màn hình PV. (Tham khảo 8.2) - Sử dụng phím Lên và Xuống cho đến khi Màn hình PV hiển thị đầu vào mô phỏng.
- Nhấn phím Return trong ít nhất 6 giây (tối đa 16 giây), sau đó thả ra. Thao tác này sẽ nhập số hiệu chuẩn thấp vào bộ nhớ không mất dữ liệu của bộ điều khiển.
- Nhấn và nhả phím Cuộn.
 ” xuất hiện trên Màn hình PV. Điều này cho biết điểm hiệu chuẩn cao.
” xuất hiện trên Màn hình PV. Điều này cho biết điểm hiệu chuẩn cao. - Tăng tín hiệu đầu vào mô phỏng để trùng với tín hiệu xử lý cao (ví dụ 11 độ).
- Sử dụng phím Lên và Xuống cho đến khi Màn hình SV hiển thị mức đầu vào cao được mô phỏng.
- Nhấn phím Return trong ít nhất 6 giây (tối đa 16 giây), sau đó thả ra. Thao tác này sẽ nhập số liệu hiệu chuẩn cao vào bộ nhớ không mất dữ liệu của bộ điều khiển.
- Tắt nguồn thiết bị, tháo toàn bộ dây kiểm tra và thay dây cảm biến (quan sát cực tính).
HOẠT ĐỘNG
8.1 HOẠT ĐỘNG BÀN PHÍM
* Khi bật nguồn, thiết bị phải đợi 12 giây để ghi nhớ các giá trị mới của các thông số sau khi thay đổi.
| PHÍM CẢM ỨNG | CHỨC NĂNG | SỰ MIÊU TẢ |
| Phím di chuyển | Di chuyển màn hình chỉ mục đến vị trí mong muốn. Mục lục sẽ liên tục và tuần hoàn khi nhấn bàn phím này. |
|
| Phím lên | Tăng tham số | |
| Phím xuống | Giảm tham số | |
| Trả lại chìa khóa | Đặt lại bộ điều khiển về trạng thái bình thường. Cũng dừng tự động điều chỉnh, đầu ra phần trămtage giám sát và vận hành ở chế độ thủ công. | |
| Nhấn |
Cuộn dài | Cho phép kiểm tra hoặc thay đổi nhiều thông số hơn. |
| Nhấn |
Quay lại dài | 1. Thực hiện chức năng tự động điều chỉnh 2. Hiệu chỉnh điều khiển khi ở mức hiệu chuẩn |
| Nhấn |
Phần trăm đầu ratage Giám sát | Cho phép hiển thị điểm đặt để chỉ ra giá trị đầu ra điều khiển. |
| Nhấn |
Thực hiện chế độ thủ công | Cho phép bộ điều khiển chuyển sang chế độ thủ công. |
8.2 BIỂU ĐỒ LƯU TRÌNH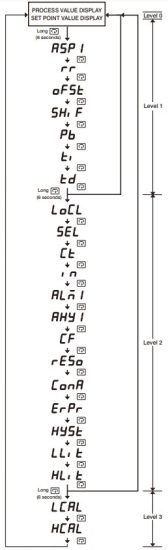 Bạn có thể nhấn phím “return” bất cứ lúc nào.
Bạn có thể nhấn phím “return” bất cứ lúc nào.
Thao tác này sẽ nhắc màn hình quay lại Giá trị quy trình/Giá trị điểm đặt.
Công suất áp dụng:
 Hiển thị trong 4 giây. (Phiên bản phần mềm 3.6 trở lên)
Hiển thị trong 4 giây. (Phiên bản phần mềm 3.6 trở lên) Kiểm tra đèn LED. Tất cả các đoạn đèn LED phải sáng trong 4 giây.
Kiểm tra đèn LED. Tất cả các đoạn đèn LED phải sáng trong 4 giây.- Giá trị quy trình và điểm đặt được chỉ ra.
8.3 MÔ TẢ THAM SỐ
| MÃ CHỈ MỤC | MÔ TẢ PHẠM VI ĐIỀU CHỈNH | **CÀI ĐẶT MẶC ĐỊNH | ||
| SV | Kiểm soát giá trị điểm đặt *Giá trị giới hạn thấp đến giới hạn cao |
Không xác định | ||
| Giá trị điểm đặt báo động * Giới hạn thấp đến giới hạn cao Value. if * 0 đến 3600 phút (nếu * Giới hạn thấp minus điểm đặt ở mức cao Giới hạn trừ giá trị điểm đặt (nếu |
200 TCN | |||
| Ramp Đánh giá giá trị quy trình để hạn chế sự thay đổi đột ngột của quy trình (Khởi động mềm) * 0 đến 200.0 BC (360.0 BF) / phút (nếu * 0 đến 3600 đơn vị / phút (nếu |
0 BC / phút | |||
| Giá trị bù trừ cho việc thiết lập lại thủ công (nếu |
0.0% | |||
| Dịch chuyển bù trừ cho giá trị quy trình * -111 TCN đến 111 TCN |
0 TCN | |||
| Dải tỷ lệ
* 0 đến 200 trước Công nguyên (đặt thành 0 để điều khiển bật-tắt) |
10 TCN | |||
| Thời gian tích phân (Đặt lại) * 0 đến 3600 giây |
120 giây | |||
| Đạo hàm (Tỷ lệ) Thời gian * 0 đến 360.0 giây |
30 giây | |||
| Chế độ cục bộ 0: Không thể thay đổi tham số điều khiển 1: Có thể thay đổi tham số điều khiển |
1 | |||
| Lựa chọn tham số (cho phép lựa chọn các tham số bổ sung có thể truy cập ở mức bảo mật 0) |
0 | |||
| Thời gian chu kỳ tỷ lệ * 0 đến 120 giây |
Tiếp sức | 20 | ||
| Xung Voltage | 1 | |||
| Volt tuyến tính/mA | 0 | |||
| Lựa chọn chế độ đầu vào 0: Kiểu J T/C 6: Kiểu S T/C 1: Loại K T/C 7: Loại N T/C 2: Loại T T/C 8: PT100 ĐẠI HỌC 3: Loại E T/C 9: PT100 JIS 4: Loại B T/C 10: Thể tích tuyến tínhtage hoặc Dòng điện 5: Loại R T/C Lưu ý: T/C-Đóng khe hàn G5, RTD-Mở G5 |
Điều khoản và điều kiện | 0 | ||
| RTD | 8 | |||
| Tuyến tính | 10 | |||
| Lựa chọn chế độ báo động 0: Quá trình báo động cao 8: Báo động ngoài băng tần 1: Quá trình báo động mức thấp 9: Báo động trong băng tần 2: Báo động độ lệch cao 10: Cấm báo động Outband 3: Cấm báo động độ lệch thấp 11: Cấm báo động Inband 4: Cấm báo động Process High 12: Rơ le báo động TẮT như 5: Cấm báo động Process Low Thời gian dừng lại 6: Ngăn chặn độ lệch báo động cao 13: Rơ le báo động BẬT khi 7: Ngăn chặn độ lệch báo động thấp Thời gian chờ |
0 | |||
| Độ trễ của báo động 1 * 0 đến 20% của SPAN |
0.5% | |||
| Lựa chọn BC/BF 0: BF, 1: BC |
1 | |||
| Lựa chọn độ phân giải 0: Không có dấu thập phân 2: 2 chữ số thập phân 1: 1 chữ số thập phân 3: 3 chữ số thập phân (2 & 3 chỉ có thể được sử dụng cho vol tuyến tínhtage hoặc hiện tại |
0 |
|||
| Kiểm soát hành động 0: Tác động trực tiếp (làm mát) 1: Tác động ngược (làm nóng) |
1 | |||
| Bảo vệ lỗi 0: Kiểm soát TẮT, Báo động TẮT 2: Kiểm soát BẬT, Báo động TẮT 1: Kiểm soát TẮT, Báo động BẬT 3: Kiểm soát BẬT, Báo động BẬT |
1 |
|||
| Độ trễ cho điều khiển BẬT/TẮT *0 đến 20% của SPAN |
0.5% | |||
| Giới hạn phạm vi thấp | -50 TCN | |||
| Giới hạn phạm vi cao | 1000 TCN | |||
| Hình hiệu chuẩn thấp | 0 TCN | |||
| Hình Hiệu Chuẩn Cao | 800 TCN | |||
LƯU Ý: * Điều chỉnh phạm vi tham số
** Cài đặt gốc. Cảnh báo quy trình ở các điểm nhiệt độ cố định. Cảnh báo độ lệch di chuyển theo giá trị điểm cài đặt.
8.4 CHỈNH TỰ ĐỘNG
- Đảm bảo bộ điều khiển được cấu hình và cài đặt đúng cách.
- Đảm bảo Dải tỷ lệ 'Pb' không được đặt ở mức '0'.
- Nhấn phím Return trong ít nhất 6 giây (tối đa 16 giây). Thao tác này sẽ khởi tạo chức năng Tự động điều chỉnh. (Để hủy quy trình tự động điều chỉnh, hãy nhấn phím Return và nhả).
- Dấu thập phân ở góc dưới bên phải của màn hình PV nhấp nháy để báo hiệu Tự động điều chỉnh đang diễn ra. Tự động điều chỉnh hoàn tất khi đèn nhấp nháy dừng lại.
- Tùy thuộc vào quy trình cụ thể, việc điều chỉnh tự động có thể mất tới hai giờ. Các quy trình có độ trễ thời gian dài sẽ mất nhiều thời gian nhất để điều chỉnh. Hãy nhớ rằng, trong khi điểm hiển thị nhấp nháy, bộ điều khiển đang tự động điều chỉnh.
GHI CHÚ: Nếu lỗi AT( ![]() ) xảy ra, quá trình điều chỉnh tự động bị hủy bỏ do hệ thống hoạt động ở chế độ điều khiển BẬT-TẮT (PB = 0).
) xảy ra, quá trình điều chỉnh tự động bị hủy bỏ do hệ thống hoạt động ở chế độ điều khiển BẬT-TẮT (PB = 0).
Quá trình cũng sẽ bị hủy nếu điểm đặt được đặt gần với nhiệt độ quy trình hoặc nếu hệ thống không đủ công suất để đạt đến điểm đặt (ví dụ: công suất sưởi ấm không đủ). Sau khi hoàn tất Tự động điều chỉnh, các thiết lập PID mới sẽ tự động được nhập vào bộ nhớ không biến động của bộ điều khiển
8.5 ĐIỀU CHỈNH PID THỦ CÔNG
Trong khi chức năng tự động điều chỉnh chọn các thiết lập điều khiển có thể chứng minh là thỏa đáng cho phần lớn các quy trình, bạn có thể thấy cần phải điều chỉnh các thiết lập tùy ý này theo thời gian. Điều này có thể xảy ra nếu một số thay đổi được thực hiện đối với quy trình hoặc nếu bạn muốn 'tinh chỉnh' các thiết lập điều khiển.
Điều quan trọng là trước khi thực hiện thay đổi đối với các thiết lập kiểm soát, bạn phải ghi lại các thiết lập hiện tại để tham khảo trong tương lai. Chỉ thực hiện những thay đổi nhỏ đối với một thiết lập tại một thời điểm và quan sát kết quả của quy trình. Vì mỗi thiết lập tương tác với nhau nên rất dễ nhầm lẫn với kết quả nếu bạn không quen thuộc với các quy trình kiểm soát quy trình.
HƯỚNG DẪN ĐIỀU CHỈNH
Dải tỷ lệ
| Triệu chứng | Giải pháp |
| Phản ứng chậm | Giảm giá trị PB |
| Vượt ngưỡng cao hoặc dao động | Tăng giá trị PB |
Thời gian tích phân (Đặt lại)
| Triệu chứng | Giải pháp |
| Phản ứng chậm | Giảm thời gian tích phân |
| Sự không ổn định hoặc dao động | Tăng thời gian tích phân |
Thời gian đạo hàm (Tỷ lệ)
| Triệu chứng | Giải pháp |
| Phản hồi chậm hoặc dao động | Giảm thời gian đạo hàm |
| Overshoot cao | Tăng thời gian đạo hàm |
8.6 QUY TRÌNH ĐIỀU CHỈNH THỦ CÔNG
Bước 1: Điều chỉnh các giá trị tích phân và đạo hàm về 0. Điều này ngăn chặn tốc độ và hành động thiết lập lại
Bước 2: Đặt giá trị tùy ý của dải tỷ lệ và theo dõi kết quả kiểm soát
Bước 3: Nếu cài đặt ban đầu tạo ra dao động quá trình lớn, hãy tăng dần dải tỷ lệ cho đến khi xảy ra chu kỳ ổn định. Ghi lại giá trị dải tỷ lệ này (Pc).
Bước 4: Đo chu kỳ tuần hoàn ổn định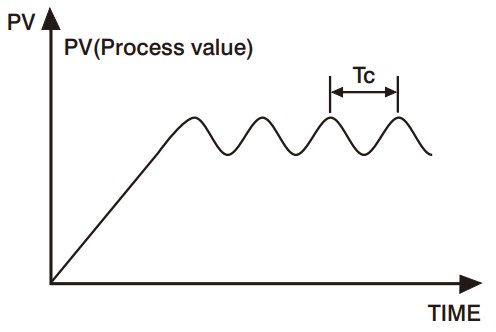 Ghi lại giá trị này (Tc) tính bằng giây
Ghi lại giá trị này (Tc) tính bằng giây
Bước 5: Cài đặt điều khiển được xác định như sau:
Tỷ lệ Band(PB)=1.7 Pc
Thời gian tích phân (TI) = 0.5 Tc
Thời gian đạo hàm (TD)=0.125 Tc
8.7 RAMP & Ở LẠI
Bộ điều khiển BTC-9090 có thể được cấu hình để hoạt động như một bộ điều khiển điểm đặt cố định hoặc như một bộ điều khiển r đơn.amp bộ điều khiển khi bật nguồn. Chức năng này cho phép người dùng thiết lập một r được xác định trướcamp tốc độ cho phép quá trình đạt dần nhiệt độ điểm đặt, do đó tạo ra chức năng 'Khởi động mềm'.
Bộ hẹn giờ dừng được tích hợp trong BTC-9090 và rơle báo động có thể được cấu hình để cung cấp chức năng dừng được sử dụng kết hợp với ramp chức năng.
Các ramp tỷ lệ được xác định bởi ' ![]() ' tham số có thể được điều chỉnh trong phạm vi từ 0 đến 200.0 BC/phút. ramp chức năng tỷ lệ bị vô hiệu hóa khi '
' tham số có thể được điều chỉnh trong phạm vi từ 0 đến 200.0 BC/phút. ramp chức năng tỷ lệ bị vô hiệu hóa khi ' ![]() 'tham số được đặt thành '0'.
'tham số được đặt thành '0'.
Chức năng ngâm được kích hoạt bằng cách cấu hình đầu ra báo động để hoạt động như một bộ hẹn giờ dừng. Tham số ![]() cần được đặt thành giá trị 12. Tiếp điểm báo động bây giờ sẽ hoạt động như một tiếp điểm hẹn giờ, với tiếp điểm được đóng khi bật nguồn và mở sau thời gian trôi qua được đặt tại tham số
cần được đặt thành giá trị 12. Tiếp điểm báo động bây giờ sẽ hoạt động như một tiếp điểm hẹn giờ, với tiếp điểm được đóng khi bật nguồn và mở sau thời gian trôi qua được đặt tại tham số![]() .
.
Nếu nguồn điện hoặc đầu ra của bộ điều khiển được nối qua tiếp điểm báo động, bộ điều khiển sẽ hoạt động như một bộ điều khiển ngâm được đảm bảo.
Trong cũample bên dưới Ramp Tốc độ được thiết lập là 5 BC/phút, ![]() = 12 và
= 12 và ![]() =15 (phút). Nguồn điện được cấp vào thời điểm bằng không và quá trình tăng lên ở mức 5 BC/phút đến điểm đặt là 125 BC. Khi đạt đến điểm đặt, bộ hẹn giờ dừng được kích hoạt và sau thời gian ngâm là 15 phút, tiếp điểm báo động sẽ mở, tắt đầu ra. Nhiệt độ của quá trình cuối cùng sẽ giảm ở tốc độ không xác định.
=15 (phút). Nguồn điện được cấp vào thời điểm bằng không và quá trình tăng lên ở mức 5 BC/phút đến điểm đặt là 125 BC. Khi đạt đến điểm đặt, bộ hẹn giờ dừng được kích hoạt và sau thời gian ngâm là 15 phút, tiếp điểm báo động sẽ mở, tắt đầu ra. Nhiệt độ của quá trình cuối cùng sẽ giảm ở tốc độ không xác định.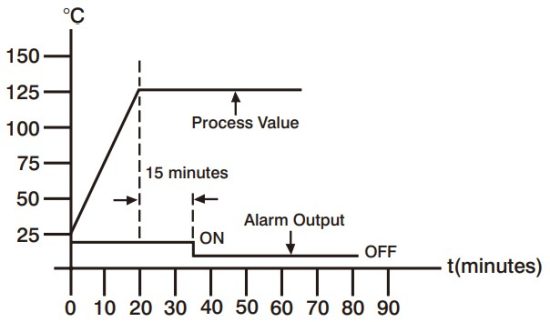 Chức năng dừng có thể được sử dụng để vận hành một thiết bị bên ngoài như còi báo động để cảnh báo khi thời gian ngâm đã đạt đến.
Chức năng dừng có thể được sử dụng để vận hành một thiết bị bên ngoài như còi báo động để cảnh báo khi thời gian ngâm đã đạt đến.
cần được đặt thành giá trị 13. Tiếp điểm báo động bây giờ sẽ hoạt động như một tiếp điểm hẹn giờ, với tiếp điểm mở khi khởi động ban đầu. Bộ hẹn giờ bắt đầu đếm ngược khi đạt đến nhiệt độ điểm đặt. Sau khi cài đặt ở đã trôi qua, tiếp điểm báo động đóng lại.
THÔNG BÁO LỖI
| Triệu chứng | Nguyên nhân (các nguyên nhân) | Các giải pháp) |
| Lỗi hỏng cảm biến | Thay thế RTD hoặc cảm biến Sử dụng chế độ vận hành thủ công |
|
| Hiển thị quá trình vượt quá điểm đặt phạm vi thấp | Điều chỉnh lại giá trị | |
| Hiển thị quá trình vượt quá điểm đặt phạm vi cao | Điều chỉnh lại giá trị | |
| Hư hỏng mô-đun lai tương tự | Thay thế mô-đun. Kiểm tra nguồn hư hỏng bên ngoài như vol tạm thờitage gai | |
| Hoạt động không đúng của quy trình tự động điều chỉnh Prop. Band được đặt thành 0 | Lặp lại quy trình. Tăng Prop. Band lên một số lớn hơn 0 | |
| Chế độ thủ công không được phép sử dụng cho hệ thống điều khiển BẬT-TẮT | Tăng băng tần tỷ lệ | |
| Lỗi tổng kiểm tra, giá trị trong bộ nhớ có thể đã thay đổi vô tình | Kiểm tra và cấu hình lại các thông số điều khiển |
Hướng dẫn bổ sung cho phiên bản mới
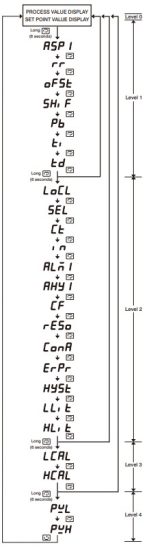
Thiết bị có phiên bản phần mềm V3.7 có thêm hai tham số bổ sung – “PVL” và “PVH” nằm ở cấp độ 4 dưới dạng sơ đồ luồng tham số ở phía bên trái.
Khi bạn cần thay đổi giá trị LLit thành giá trị cao hơn hoặc thay đổi giá trị HLit thành giá trị thấp hơn, các thủ tục sau đây phải được thực hiện để làm cho giá trị PVL tương đương với một phần mười giá trị LCAL và giá trị PVH tương đương với một phần mười giá trị HCAL. Nếu không, các giá trị quy trình được đo sẽ nằm ngoài thông số kỹ thuật.
- Sử dụng phím Scroll cho đến khi “LLit” xuất hiện trên màn hình PV. Sử dụng phím Lên và Xuống để đặt giá trị LLit lên giá trị cao hơn giá trị ban đầu.
- Nhấn và thả phím Scroll, sau đó “HLit” sẽ xuất hiện trên màn hình PV. Sử dụng phím Lên và Xuống để đặt giá trị HLit xuống giá trị thấp hơn giá trị ban đầu.
- Tắt và bật nguồn.
- Sử dụng Phím Cuộn cho đến khi “LCAL” xuất hiện trên Màn hình PV. Ghi chú giá trị LCAL.
- Nhấn và nhả phím Scroll, sau đó “HCAL” sẽ xuất hiện trên màn hình PV. Ghi chú giá trị HCAL.
- Nhấn phím Scroll trong ít nhất 6 giây rồi thả ra, “PVL” sẽ xuất hiện trên màn hình PV. Sử dụng phím UP và Down để đặt giá trị PVL thành một phần mười giá trị LCAL.
- Nhấn và nhả phím Scroll, “PVH” sẽ xuất hiện trên màn hình PV. Sử dụng phím UP và Down để đặt giá trị PVH thành một phần mười giá trị HCAL.
-Vui lòng lắp cầu dao 20A vào đầu nguồn điện
-Để loại bỏ bụi hãy sử dụng vải khô
- Việc lắp đặt mà sự an toàn của bất kỳ hệ thống nào kết hợp với thiết bị là trách nhiệm của người lắp ráp hệ thống
-Nếu thiết bị được sử dụng theo cách không được nhà sản xuất chỉ định, khả năng bảo vệ của thiết bị có thể bị suy giảm.
Không che lỗ thông hơi làm mát để duy trì luồng không khí
Cẩn thận không vặn quá chặt các vít đầu cực. Mô-men xoắn không được vượt quá . 1 14 Nm (10 Lb-in hoặc 11.52 KgF-cm), nhiệt độ Tối thiểu 60°C, chỉ sử dụng dây dẫn bằng đồng.
Ngoại trừ hệ thống dây điện cặp nhiệt điện, tất cả hệ thống dây điện phải sử dụng dây dẫn bằng đồng xoắn có cỡ tối đa là 18 AWG.
BẢO HÀNH
Công ty TNHH Điện tử Brainchild rất vui khi được đưa ra những gợi ý về việc sử dụng các sản phẩm khác nhau của mình.
Tuy nhiên, Brainchild không đưa ra bất kỳ bảo đảm hoặc tuyên bố nào về tính phù hợp để sử dụng hoặc việc áp dụng các sản phẩm của mình bởi Người mua. Việc lựa chọn, áp dụng hoặc sử dụng các sản phẩm của Brainchild là trách nhiệm của Người mua. Không được phép khiếu nại về bất kỳ thiệt hại hoặc mất mát nào, dù là trực tiếp, gián tiếp, ngẫu nhiên, đặc biệt hay do hậu quả. Các thông số kỹ thuật có thể thay đổi mà không cần thông báo. Ngoài ra, Brainchild có quyền thực hiện các thay đổi mà không cần thông báo cho Người mua đối với vật liệu hoặc quy trình xử lý không ảnh hưởng đến việc tuân thủ bất kỳ thông số kỹ thuật nào được áp dụng. Các sản phẩm của Brainchild được bảo hành không có lỗi về vật liệu và tay nghề trong 18 tháng sau khi giao cho người mua đầu tiên để sử dụng. Có thể gia hạn thời gian với chi phí bổ sung theo yêu cầu. Trách nhiệm duy nhất của Brainchild theo bảo hành này, tùy theo lựa chọn của Brainchild, chỉ giới hạn ở việc thay thế hoặc sửa chữa miễn phí hoặc hoàn lại giá mua trong thời hạn bảo hành đã chỉ định. Bảo hành này không áp dụng cho các thiệt hại do vận chuyển, thay đổi, sử dụng sai mục đích hoặc lạm dụng.
TRẢ LẠI
Không chấp nhận trả lại sản phẩm nếu không có mẫu Ủy quyền trả lại vật liệu (RMA) đã hoàn thành.
GHI CHÚ:
Thông tin trong hướng dẫn sử dụng này có thể thay đổi mà không cần báo trước.
Bản quyền a 2023, The Brainchild Electronic Co., Ltd., mọi quyền được bảo lưu. Không một phần nào của ấn phẩm này được phép sao chép, truyền tải, sao chép hoặc lưu trữ trong hệ thống truy xuất, hoặc dịch sang bất kỳ ngôn ngữ nào dưới bất kỳ hình thức nào bằng bất kỳ phương tiện nào mà không có sự cho phép bằng văn bản của Brainchild Electronic Co., Ltd.
![]() Mọi nhu cầu sửa chữa, bảo trì vui lòng liên hệ với chúng tôi.
Mọi nhu cầu sửa chữa, bảo trì vui lòng liên hệ với chúng tôi.
Công ty TNHH Điện Tử
Số 209, Đường Chung Yang, Quận Nan Kang,
Đài Bắc 11573, Đài Loan
Điện thoại: 886-2-27861299
Số Fax: 886-2-27861395
web địa điểm: http://www.brainchildtw.com![]()
Tài liệu / Tài nguyên
 |
Bộ điều khiển dựa trên vi xử lý logic mờ BrainChild BTC-9090 [tập tin pdf] Hướng dẫn sử dụng BTC-9090, BTC-9090 G UL, BTC-9090 Bộ điều khiển dựa trên vi xử lý logic mờ, Bộ điều khiển dựa trên vi xử lý logic mờ, Bộ điều khiển dựa trên vi xử lý, Bộ điều khiển dựa trên bộ xử lý, Bộ điều khiển dựa trên |