marXperts Квадратурен декодер за инкрементални енкодери

Информации за производот
Спецификации
- Име на производ: маркадб
- Верзија: v1.1
- Тип: Квадратурен декодер за инкрементални енкодери
- Производител: marXperts GmbH
Информации за производот
Marquadb е квадратен декодер дизајниран за инкрементални енкодери. Се одликува со хардверски компоненти, вклучувајќи ја кутијата за контролер marquadb. Уредот овозможува поврзување до 3 дополнителни енкодери преку USB-B конектор и конектор D-Sub9.
Стандардниот voltagПоставките се LOW на 0.0 Volt и HIGH на 3.3 Volt, со опција за промена на нивоата доколку е потребно. Уредот не е во реално време и има време на префрлување помеѓу LOW и HIGH од околу 5 микросекунди, што може да се прилагоди за подолго времетраење на излезниот сигнал.
Најчесто поставувани прашања
- Q: Може ли тtagДали нивоата се менуваат на marquadb?
- A: Да, можно е да се смени томtage нивоа на marquadb ако сакате.
- Q: Колку инкрементални енкодери може да се поврзат со marquadb?
- A: Marquadb може да поврзе до 3 инкрементални енкодери преку конекторот D-Sub9.
Како да го користите овој прирачник
Пред да започнете со ракување со кутијата marquadb, ве молиме внимателно прочитајте го Упатството за употреба и Техничката документација вклучени во пакетот со документација.
Декларации
Европа![]()
Инструментот е во согласност со EMC директивите 2014/30/EU, Low Voltage Директива 2014/35/ЕУ како и RoHS директива 3032/2012.
Усогласеноста беше докажана со усогласеност со следните спецификации наведени во Службениот весник на Европските заедници:
- EN61326-1: 2018 (Електрична безбедност)
- EN301 489-17: V3.1.1: 2017 (EMC за радио опрема и услуги)
- EN301 48901 V2.2.3: 2019 (EMC за радио опрема и услуги)
- EN300 328 V2.2.2: 2019 (Систем за пренос на широк опсег во опсегот 2.4 GHz)
- EN6300: 2018 (RoHS)
Северна Америка![]()
Утврдено е дека инструментот е во согласност со спецификациите за дигитален уред од класа Б во согласност со Дел 15 од правилата на FCC и ги исполнува сите барања од канадскиот стандард за опрема за предизвикување пречки ICES-003 за дигитални уреди.
Директива за отпадна електрична и електронска енергија
Крајните корисници можат да ги вратат инструментите на Marxperts GmbH за отстранување без да им се наплати за фрлање.
Оваа понуда важи само под следниве услови:
- единицата е продадена на компанија или институт во ЕУ
- единицата моментално е во сопственост на компанија или институт во рамките на ЕУ
- единицата е комплетна и не е контаминирана
Инструментот не содржи батерии. Доколку не му се врати на производителот, сопственикот е одговорност да ги следи локалните правила за отстранување на електронската опрема.
Функција
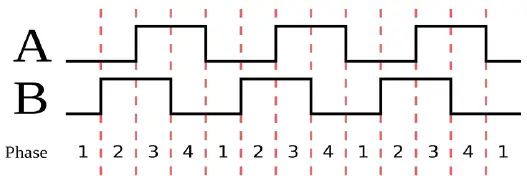
Кутијата marquadb е микроконтролер кој ги брои сигналите („A quad B“) од инкременталните енкодери. Инкременталните енкодери се линеарни или ротациони електромеханички уреди кои имаат 2 излезни сигнали, A и B, кои издаваат импулси кога уредот се поместува. Инкременталните енкодери известуваат за зголемување на позицијата речиси моментално, што им овозможува да ги следат движењата на механизмите со голема брзина во речиси реално време. Додека сигналот А и Б ќе го покажат напредокот на движењето, фазното поместување помеѓу А и Б овозможува да се одреди правецот на движење. На сликата погоре, сигналот Б е водечки А, така што насоката на движење е негативна.
Полето marquadb брои импулси од најмногу 3 извори независно, но не истовремено. Броењето работи во која било насока. Инструментот ќе го пријави правецот на движењето и времето поминато за да се избројат импулсите од кои може да се изведе брзината на движењето. Меѓутоа, вистинската функција на mar quadb кутијата е да активира дејство откако ќе се постигне одредено броење пулсирања. Кутијата внесува сигнал (како TTL) во еден од коаксијалните излези. Нивото на коаксијалниот излез е или ВИСОКО или НИСКО и е како што следува:
- НИСКО ако кутијата не се брои
- ВИСОКО ако кутијата се брои
- префрлете се на LOW ако е изброен бројот на импулси
- вратете се на HIGH веднаш или по доцнење што може да се конфигурира
- НИСКО ако кутијата престане да брои
Стандардно, LOW значи 0.0 Volt, а HIGH значи 3.3 Volt. По желба е можно да се сменат нивоата. Кутијата marquadb не е инструмент во реално време. Времето за префрлување помеѓу LOW и HIGH е од редот на големина од 5 микросекунди, но можно е да се зголеми времетраењето на излезниот сигнал.
Типична употреба на инструментот е да обезбеди сигнали за активирање на секаков вид на хардвер додека се движи моторот поврзан со енкодер. Сигналите за активирање ќе се создадат по броење даден број импулси. Инструментот не треба да знае за физичките својства на моторот. Само ги брои А и Б импулсите на инкременталниот енкодер.
Exampле: Мотор кој дава 1000 импулси на енкодер на mm движење треба да активира камера која снима фотографија по секое движење од 1 mm. Ова бара камера способна да прима сигнали за активирање од типот TTL.
Хардверски компоненти
Уредот се испорачува со следните компоненти:
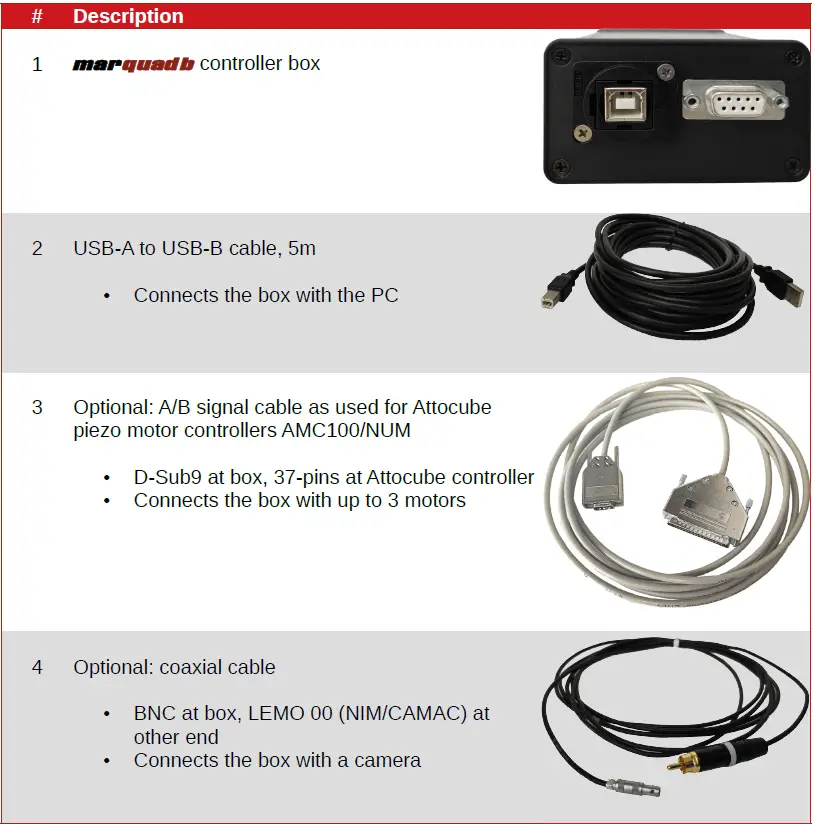
Влезови
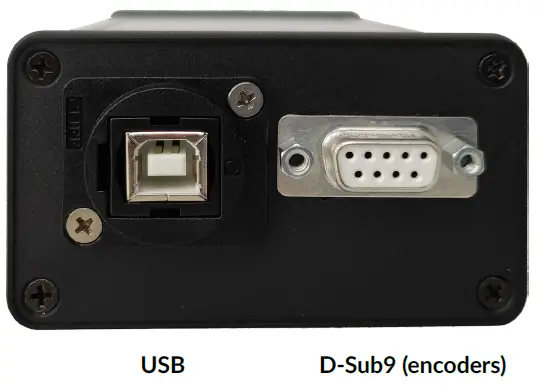
Кутијата marquadb има USB-B конектор на задната страна, како и конектор D-Sub9. Кутијата треба да се поврзе со компјутер преку USB-кабел.
Линиите A, B и заземјувачите од најмногу 3 инкрементални енкодери се внесуваат во контролорот преку 9-пински конектор.
Доделувањата на пиновите се прикажани во табелата подолу.
| Пин | Доделување | |
| 1 | Кодер 1: сигнал А | 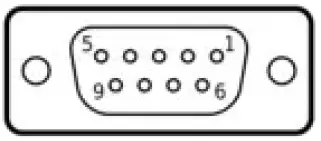
|
| 2 | Кодер 1: сигнал Б | |
| 3 | Кодер 1: GND | |
| 4 | Кодер 2: сигнал А | |
| 5 | Кодер 2: сигнал Б | |
| 6 | Кодер 2: GND | |
| 7 | Кодер 3: сигнал А | |
| 8 | Кодер 3: сигнал Б | |
| 9 | Кодер 3: GND |
Излези
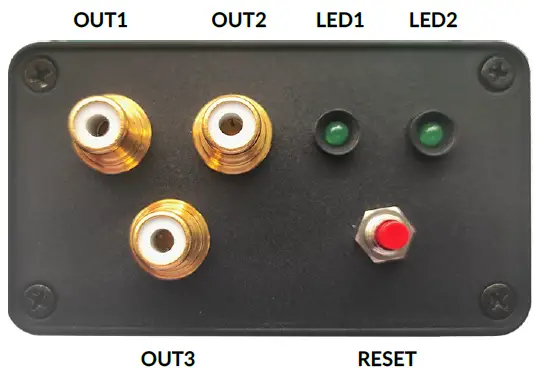
Излезните сигнали се доставуваат до коаксијални конектори кои мора да ја поврзат кутијата (конектор во боја на месинг) со целниот уред, на пр. камера. Кога контролорот е во мирување, излезот на коаксијалниот излез е LOW (0.0 Volt). Кога контролорот ќе почне да брои, излезниот сигнал е поставен ВИСОКО (3.3 волти). По постигнување на даден број брои, излезниот сигнал паѓа на LOW. Овој сигнал може да се користи за активирање на читање на камера или некое дејство во некој друг тип на хардвер. Оваа операција ќе се повторува даден број пати.
Времетраењето на префрлувањето на сигналот ВИСОКО-НИСКО-ВИСОКО е прибл. 5 микросекунди. Можно е и инвертирање на сигналите (HIGH=0 V, LOW=3.3 V).
Кога контролорот брои сигнали, LED1 ќе светне. Во спротивно, кога контролорот е во мирување, LED1 е исклучен. LED2 ќе работи слично, но ќе се вклучи само ако излезниот сигнал е ВИСОК, а во спротивно е исклучен. Бидејќи времето на префрлување помеѓу HIGH и LOW е многу кратко, и двете LED диоди обично изгледаат исто.
Времето на одложување што може да се постави мора да биде најмалку 100 милисекунди за да се види разликата.
Копчето RESET ќе го рестартира контролерот што е алтернатива за исклучување на USB-кабелот. Кога се подига, LED1 трепка 5 пати додека LED2 постојано свети. По секвенцата на иницијализација, двете LED диоди ќе се исклучат.
Комуникација
Контролерот marquadb мора да се контролира од компјутерот за собирање податоци преку USB конекција (USB-B на USB-A). Контролерот обезбедува конвенционален сериски интерфејс кој ги разбира обичните ASCII команди и кој испраќа излез до серискиот интерфејс како низи со обичен текст.
Затоа е можно да се ракува со кутијата „рачно“ или преку API. Може да користите различни програми кои користат сериски врски, на пр. PuTTY на Windows или minicom на Linux. Ве молиме користете ги следните поставки за сериска врска:
- баудрат: 115200
- паритет: Нема
- прекини: 1
- големина на бајт: 8 бита
- контрола на протокот: нема
На Линукс, на тој начин би можеле едноставна команда како следнава, осигурувајќи се дека уредот file ги има соодветните дозволи за корисникот да чита од него и да му пишува:
- minicom -D /dev/ttyACM0 -b 115200
На Linux OS, /dev/ttyACM0 би било типично име на уред. На Windows, би било прилично COMn каде n е едноцифрена.
Забелешка: кога имплементирате API за комуникација користејќи ги командите подолу, проверете дали ги читате и текстуалните низи генерирани од контролорот, дури и ако не ги користите.
Наредби
Контролорот ги разбира следните команди (низите во загради се опционални.
- брои N линии L канал C – внесете режим на броење за N брои со L линии на шифрирање (пулсирања) секоја на каналот C (стандардно: N=0, L=1000, C=1)
- NL [C] – како погоре, но без клучни зборови „брои“ и „линии“ и со опција за снабдување на каналот 1 до 3
- init [T [L]] – иницијализирајте со T линии како толеранција и L линии за почеток (стандардно: T=1, L=1000)
- канал [нел] C – брои сигнали од каналот C (1 до 3, стандардно: 3)
- помош – покажува употреба
- set – ги прикажува тековните вредности на параметрите што може да се постават
- шоу – го прикажува напредокот на тековното броење вклучувајќи го и изминатото време
- високо – го поставува стандардното ниво на сигнал на HIGH (3.3 V)
- low – го поставува стандардното ниво на сигнал на LOW (0 V)
- led1|2 вклучено|исклучено – вклучете или исклучете го LED1|2
- надвор1|2|3 вклучено|исклучено – вклучете OUT1|2|3 вклучете (ВИСОКО) или исклучете (НИСКО)
- tol[erance] T – толеранција за изброени сигнали за достигнување на целта (стандардно: T=1)
- usec U – време во микросекунди за враќање на излезното ниво од LOW на HIGH по настан на броење (стандардно: U = 0)
- крај | прекинете | стоп – заврши тековното броење пред да се достигне целта
- verbose [неточно|точно] – ја менува говорноста. Користете го аргументот Точно од Неточно
За да започнете со броење N настани, доволно е само да внесете N. По издавањето на командата, броењето започнува и излезниот сигнал се поставува на HIGH (3.3 V). Параметарот L е бројот на линии (пулсирања) што треба да се бројат пред да се генерира сигнал за активирање на соодветниот излез OUT1, OUT2 или OUT3. Овој процес се повторува за N циклуси.
Времетраењето на излезниот сигнал, т.е. прекинувачот ВИСОКО-НИСКИ-ВИСОК, се регулира со брзината на процесорот на контролорот и е околу 5 микросекунди. Времетраењето може да се смени со помош на командата „usec U“ каде U е времетраењето на сигналот во микросекунди и стандардно е 0. Ако сите N брои се завршени, излезот се поставува на LOW и контролорот се враќа во состојба на мирување.
Додека се брои, LED1 и LED2 се вклучени. Ако режимот на броење е активен, сите дополнителни команди за броење линии се игнорираат. Не е возможно да се бројат линии истовремено на повеќе од 1 канал.
Exampле:
За да броите 4 пати по 250 линии на каналот 3, издадете команда „4 250 3“. Ќе добиете повратни информации слични на:
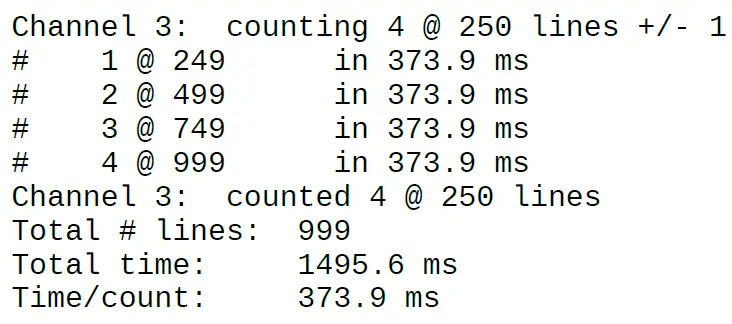
Како што може да се види, инструментот го враќа изминатото време и вкупниот бр. од броени линии. Вкупниот број на линии ќе биде или позитивен или негативен, што укажува на насоката на движење. Меѓутоа, бројот на пулсирања што треба да се избројат секогаш ќе биде даден како позитивен број, без оглед на вистинската насока на движење.
Контакт
Доколку имате прашања во врска со системот или неговата употреба, ве молиме контактирајте не преку телефон или е-пошта.
marXperts GmbH
- Werkstr. 3 22844 Нордерштет / Германија
- Тел.: +49 (40) 529 884 – 0
- Факс: +49 (40) 529 884 – 20
- info@marxperts.com
- www.marxperts.com
Авторски права 2024 marXperts GmbH
Сите права се задржани.
Документи / ресурси
 |
marXperts Квадратурен декодер за инкрементални енкодери [pdf] Упатство за користење v1.1, Квадратурен декодер за инкрементални енкодери, Квадратура, декодер за инкрементални енкодери, инкрементални енкодери, енкодери |