marXperts Quadrature Decoder for Incremental Encoders

پيداوار جي ڄاڻ
وضاحتون
- پيداوار جو نالو: marquadb
- نسخو: v1.1
- قسم: وڌندڙ انڪوڊرز لاءِ ڪواڊريچر ڊيڪوڊر
- ٺاهيندڙ: marXperts GmbH
پيداوار جي ڄاڻ
marquadb هڪ quadrature ڊيڪوڊر آهي جيڪو وڌندڙ انڪوڊرز لاءِ ٺهيل آهي. اهو هارڊويئر اجزاء شامل آهي جنهن ۾ مارڪواڊ بي ڪنٽرولر باڪس شامل آهن. ڊوائيس هڪ USB-B کنیکٹر ۽ هڪ D-Sub3 کنیکٹر ذريعي 9 وڌندڙ انڪوڊرز جي ڪنيڪشن جي اجازت ڏئي ٿي.
ڊفالٽ حجمtagاي سيٽنگون 0.0 وولٽ تي گهٽ ۽ 3.3 وولٽ تي اعلي آهن، جيڪڏهن ضرورت هجي ته سطح کي ريورس ڪرڻ جي اختيار سان. ڊوائيس حقيقي وقت نه آهي ۽ تقريبا 5 مائڪرو سيڪنڊن جي LOW ۽ HIGH جي وچ ۾ هڪ سوئچنگ وقت آهي، جنهن کي ڊگھي آئوٽ سگنل جي مدت لاء ترتيب ڏئي سگهجي ٿو.
FAQ
- Q: ڪري سگهو ٿا والیومtagاي ليولز کي مارڪواڊ بي تي تبديل ڪيو وڃي؟
- A: ها، اهو ممڪن آهي ته وول کي ريورس ڪرڻtagمارڪواڊ بي تي اي سطحون جيڪڏھن چاھيو.
- Q: مارڪواڊ بي سان ڪيترا واڌارو انڪوڊر ڳنڍجي سگھن ٿا؟
- A: marquadb D-Sub3 کنیکٹر ذريعي 9 واڌارو انڪوڊرز تائين ڳنڍي سگھي ٿو.
هي دستياب ڪيئن استعمال ڪجي
ان کان اڳ جو توھان مارڪواڊ بي باڪس کي هلائڻ شروع ڪريو مھرباني ڪري پڙھو يوزر مينوئل ۽ ٽيڪنيڪل دستاويز جيڪي دستاويز پيڪيج ۾ شامل آھن احتياط سان.
اعلان
يورپ![]()
اوزار EMC هدايتون 2014/30/EU جي تعميل ڪري ٿو، گھٽ حجمtage Directive 2014/35/EU ۽ گڏوگڏ RoHS ھدايت 3032/2012.
تعميل جو مظاهرو ڪيو ويو هيٺ ڏنل وضاحتن جي مطابقت سان يورپي ڪميونٽيز جي سرڪاري جرنل ۾ درج ٿيل:
- EN61326-1: 2018 (اليڪٽريڪل سيفٽي)
- EN301 489-17: V3.1.1: 2017 (اي ايم سي ريڊيو سامان ۽ خدمتن لاءِ)
- EN301 48901 V2.2.3: 2019 (EMC ريڊيو سامان ۽ خدمتن لاءِ)
- EN300 328 V2.2.2: 2019 (وائڊ بينڊ ٽرانسميشن سسٽم 2.4 GHz بينڊ ۾)
- EN6300: 2018 (RoHS)
اتر آمريڪا![]()
اوزار FCC ضابطن جي پارٽ 15 جي مطابق ڪلاس B ڊجيٽل ڊيوائس لاءِ وضاحتن جي تعميل ڪرڻ لاءِ مليو آهي ۽ ڊجيٽل ڊوائيسز لاءِ ڪينيڊين مداخلت سبب ساز سامان معياري ICES-003 جي سڀني ضرورتن کي پورو ڪري ٿو.
فضول برقي ۽ اليڪٽرانڪ هدايتون
آخري استعمال ڪندڙ اوزار واپس ڪري سگھن ٿا مارڪسپرٽس GmbH کي ڊسپوزل لاءِ بغير ڊسپوزل جي چارج جي.
هي آڇ صرف هيٺين شرطن تحت صحيح آهي:
- يونٽ يورپي يونين جي اندر هڪ ڪمپني يا انسٽيٽيوٽ کي وڪرو ڪيو ويو آهي
- يونٽ هن وقت EU اندر هڪ ڪمپني يا انسٽيٽيوٽ جي ملڪيت آهي
- يونٽ مڪمل آهي ۽ آلوده نه آهي
اوزار بيٽرين تي مشتمل نه آهي. جيڪڏهن ٺاهيندڙ ڏانهن واپس نه ڪيو ويو، اهو مالڪ جي ذميواري آهي ته برقي سامان کي ختم ڪرڻ لاء مقامي قاعدن جي پيروي ڪرڻ.
فنڪشن
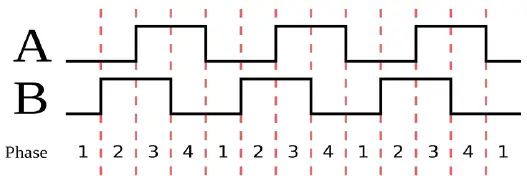
marquadb باڪس هڪ مائڪرو ڪنٽرولر آهي جيڪو ڳڻپ ڪري ٿو سگنل ("A Quad B") وڌندڙ انڪوڊرن مان. انڪريمينٽل انڪوڊرز لڪير يا روٽري اليڪٽروميڪانيڪل ڊيوائسز آھن جن ۾ 2 آئوٽ پُٽ سگنلز آھن، A und B، جيڪي دال جاري ڪن ٿا جڏھن ڊوائيس منتقل ٿئي ٿي. وڌندڙ انڪوڊرز پوزيشن جي واڌ کي تقريبن فوري طور تي رپورٽ ڪن ٿا، جيڪو انهن کي حقيقي وقت جي ويجهو تيز رفتار ميڪانيزم جي تحريڪن جي نگراني ڪرڻ جي اجازت ڏئي ٿو. جڏهن ته يا ته A ۽ B سگنل هڪ تحريڪ جي ترقي کي ڏيکاري ها، A ۽ B جي وچ ۾ مرحلو شفٽ کي حرڪت جي هدايت کي طئي ڪرڻ جي اجازت ڏئي ٿي. مٿي ڏنل شڪل ۾ ڏيکاريل آهي، سگنل B A جي اڳواڻي ڪري رهيو آهي، تنهنڪري حرڪت جو رخ منفي آهي.
marquadb باڪس 3 ذريعن کان دالن کي آزاد طور تي شمار ڪري ٿو، پر گڏو گڏ نه. ڳڻپ ٻنهي طرفن ۾ ڪم ڪري ٿي. اوزار حرڪت جي هدايت جي رپورٽ ڪندو ۽ نبضن کي ڳڻڻ ۾ گذري ويو وقت جنهن مان حرڪت جي رفتار حاصل ڪري سگهجي ٿي. بهرحال، مار ڪواڊب باڪس جو اصل ڪم دالن جي ڏنل ڳڻپ تائين پهچڻ کان پوءِ هڪ عمل شروع ڪرڻ آهي. باڪس هڪ سگنل کي فيڊ ڪري ٿو (TTL جھڙوڪ) هڪ همراه آئوٽ پُٽ ۾. coaxial پيداوار جي سطح يا ته HIGH يا LOW آهي ۽ هن ريت آهي:
- LOW جيڪڏهن باڪس ڳڻپ نه آهي
- HIGH جيڪڏھن دٻي جي ڳڻپ آهي
- تبديل ڪريو LOW تي جيڪڏھن دال جو تعداد ڳڻيو ويو آھي
- واپس HIGH تي فوري طور تي يا ترتيب ڏيڻ واري دير کان پوءِ
- LOW جيڪڏھن دٻي ڳڻڻ بند ٿي وڃي
ڊفالٽ طور، LOW جو مطلب آھي 0.0 وولٽ ۽ HIGH جو مطلب آھي 3.3 وولٽ. اهو ممڪن آهي ته سطح کي ريورس ڪرڻ جيڪڏهن گهربل هجي. marquadb باڪس حقيقي وقت جو اوزار ناهي. LOW ۽ HIGH جي وچ ۾ مٽائڻ جو وقت 5 مائڪرو سيڪنڊن جي شدت جي ترتيب ۾ آهي پر اهو ممڪن آهي ته آئوٽ پٽ سگنل جي مدت کي وڌايو وڃي.
اوزار جو هڪ عام استعمال ڪنهن به قسم جي هارڊويئر کي ٽرگر سگنل مهيا ڪرڻ آهي جيئن هڪ انڪوڊر سان گڏ موٽر هلي رهي آهي. دال جي ڏنل تعداد کي ڳڻڻ کان پوءِ ٽرگر سگنل ٺاهيا ويندا. اوزار کي موٽر جي جسماني ملڪيت بابت ڄاڻڻ جي ضرورت ناهي. اهو صرف ڳڻپ ڪري ٿو A ۽ B نبضن جي وڌندڙ انڪوڊر جي.
Exampاليزي: هڪ موٽر جيڪا 1000 انڪوڊر پلس في ايم ايم جي حرڪت کي ڏئي ٿي، هڪ ڪئميرا کي متحرڪ ڪرڻ گهرجي جيڪو 1 ملي ايم جي هر حرڪت کان پوء فوٽو ڪڍندو آهي. ان لاءِ TTL-قسم جي ٽريگر سگنلز حاصل ڪرڻ جي قابل ڪيمرا جي ضرورت آھي.
هارڊويئر اجزاء
ڊوائيس ھيٺ ڏنل اجزاء سان ٻيڙيون آھن:
داخلائون
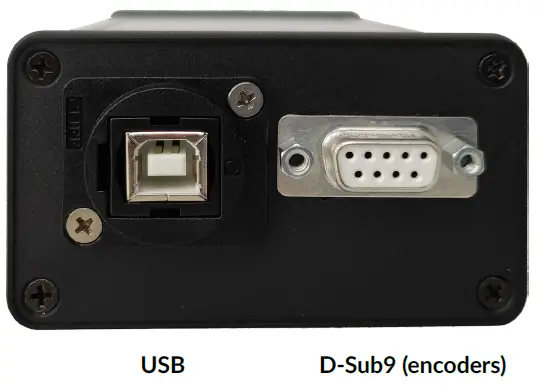
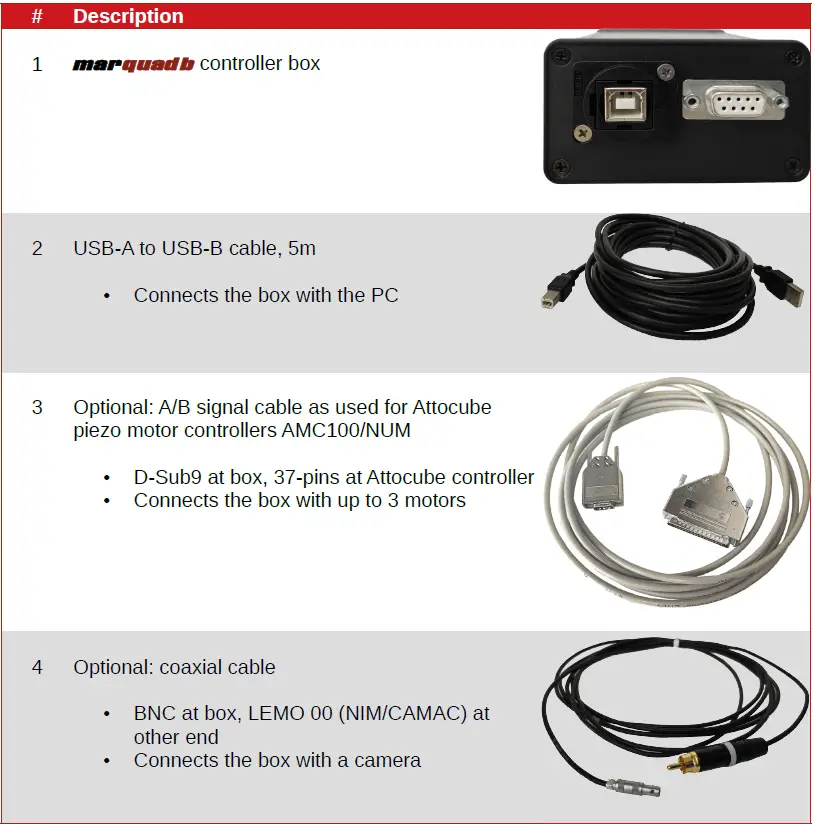
marquadb باڪس جي پوئين پاسي تي هڪ USB-B ڪنيڪٽر ۽ گڏوگڏ هڪ D-Sub9 کنیکٹر آهي. باڪس کي USB ڪيبل استعمال ڪندي پي سي سان ڳنڍڻو پوندو.
A، B ۽ گرائونڊ لائينز کان وٺي 3 وڌندڙ انڪوڊرز کي 9 پن ڪنيڪٽر ذريعي ڪنٽرولر ۾ ڀريو وڃي ٿو.
پن تفويض هيٺ ڏنل جدول ۾ ڏيکاريل آهن.
| پن | تفويض | |
| 1 | انڪوڊر 1: سگنل A | 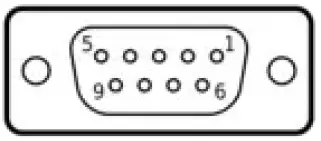
|
| 2 | انڪوڊر 1: سگنل B | |
| 3 | انڪوڊر 1: GND | |
| 4 | انڪوڊر 2: سگنل A | |
| 5 | انڪوڊر 2: سگنل B | |
| 6 | انڪوڊر 2: GND | |
| 7 | انڪوڊر 3: سگنل A | |
| 8 | انڪوڊر 3: سگنل B | |
| 9 | انڪوڊر 3: GND |
ٻاھر ڪڍڻ
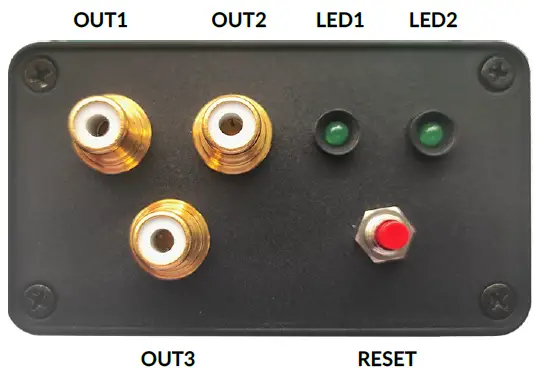
آئوٽ پُٽ سگنلز ڪوئڪسيل ڪنيڪٽرن کي فراهم ڪيا ويندا آهن جن کي باڪس (پيتل جي رنگ جو ڪنيڪٽر) کي ٽارگيٽ ڊيوائس سان ڳنڍڻو پوندو، مثال طور ڪئميرا. جڏهن ڪنٽرولر بيڪار هوندو آهي، ته ڪوئڪسيل آئوٽ تي ٻاڦ گهٽ (0.0 وولٽ) هوندي آهي. جڏهن ڪنٽرولر ڳڻڻ شروع ٿئي ٿو، ٻاڦ سگنل مقرر ڪيو ويو آهي HIGH (3.3 وولٽ). ڳڻپ جي ڏنل تعداد تائين پهچڻ کان پوءِ، آئوٽ پٽ سگنل گهٽجي وڃي ٿو. هي سگنل ڪنهن ٻئي قسم جي هارڊويئر ۾ ڪيمرا جي پڙهڻ يا ڪجهه عمل کي شروع ڪرڻ لاءِ استعمال ٿي سگهي ٿو. هن آپريشن کي بار بار ڪيو ويندو هڪ ڏنل تعداد لاء.
HIGH-LOW-HIGH سگنل سوئچنگ جي مدت تقريبن آهي. 5 مائڪرو سيڪنڊ. سگنلن کي ڦيرائڻ ممڪن آهي (HIGH=0 V، LOW=3.3 V).
جڏهن ڪنٽرولر سگنلن جي ڳڻپ ڪري رهيو آهي، LED1 روشن ڪيو ويندو. ٻي صورت ۾، جڏهن ڪنٽرولر بيڪار آهي، LED1 بند آهي. LED2 ساڳيءَ طرح هلندي پر ان صورت ۾ ئي آن ٿيندو جڏهن آئوٽ پٽ سگنل هاءِ هجي ۽ ٻي صورت ۾ بند ڪيو وڃي. جيئن ته HIGH ۽ LOW جي وچ ۾ سوئچنگ جو وقت تمام ننڍو آهي، ٻئي LEDs عام طور تي هڪجهڙا نظر ايندا.
فرق ڏسڻ لاءِ ترتيب ڏيڻ واري دير جو وقت گهٽ ۾ گهٽ 100 مليسيڪنڊ هجڻ گهرجي.
RESET بٽڻ ڪنٽرولر کي ريبوٽ ڪندو جيڪو USB ڪيبل کي ان پلگ ڪرڻ جو متبادل آهي. جڏهن بوٽ اپ ڪريو، LED1 5 ڀيرا چمڪندڙ آهي جڏهن ته LED2 مسلسل روشن آهي. شروعاتي ترتيب کان پوء، ٻنهي LED کي بند ڪيو ويندو.
ڪميونيڪيشن
مارڪواڊ بي ڪنٽرولر کي لازمي طور تي ڪنٽرول ڪيو وڃي ڊيٽا گڏ ڪرڻ واري پي سي کان USB ڪنيڪشن ذريعي (USB-B کان USB-A). ڪنٽرولر هڪ روايتي سيريل انٽرفيس مهيا ڪري ٿو جيڪو سمجهي ٿو سادو ASCII ڪمانڊ ۽ جيڪو ٻاڦ موڪلي ٿو سيريل انٽرفيس ڏانهن سادي متن جي تارن جي طور تي.
تنهن ڪري اهو ممڪن آهي ته باڪس کي هلائڻ لاء "دستي طور تي" يا هڪ API ذريعي. توھان مختلف قسم جا پروگرام استعمال ڪري سگھو ٿا جيڪي سيريل ڪنيڪشن استعمال ڪن ٿا، مثال طور ونڊوز تي PuTTY يا Linux تي minicom. مھرباني ڪري ھيٺ ڏنل سيريل ڪنيڪشن سيٽنگون استعمال ڪريو:
- باڊريٽ: 115200
- برابري: ڪوبه نه
- اسٽاپ بيٽس: 1
- bytesize: 8 بٽ
- وهڪري جو ڪنٽرول: ڪوبه نه
لينڪس تي، توهان اهڙيء طرح هڪ سادي حڪم هيٺ ڪري سگهو ٿا، انهي کي يقيني بڻائڻ، ڊوائيس file استعمال ڪندڙ کي ان مان پڙهڻ ۽ ان تي لکڻ لاءِ مناسب اجازتون آهن:
- minicom -D /dev/ttyACM0 -b 115200
Linux OS تي، /dev/ttyACM0 هڪ عام ڊوائيس جو نالو هوندو. ونڊوز تي، ان جي بدران COMn هوندو جتي n هڪ واحد عدد آهي.
نوٽ: جڏهن هيٺ ڏنل حڪمن کي استعمال ڪندي هڪ ڪميونيڪيشن API لاڳو ڪيو وڃي، پڪ ڪريو ته ڪنٽرولر پاران ٺاهيل ٽيڪسٽ اسٽرنگ کي به پڙهو، جيتوڻيڪ توهان انهن کي استعمال نه ڪري رهيا آهيو.
حڪم
ڪنٽرولر ھيٺين حڪمن کي سمجھي ٿو (بريڪٽس ۾ تار اختياري آھن.
- اين لائينون ايل چينل سي ڳڻيو - اين ڳڻپ لاءِ ڳڻپ واري موڊ ۾ داخل ڪريو L انڪوڊر لائينز (پلس) سان ھر ھڪ چينل سي تي (ڊفالٽ: N=0، L=1000، C=1)
- NL [C] - جيئن مٿي، پر لفظ "ڳڻپ" ۽ "لائنز" جي بغير ۽ چينل 1 کان 3 تائين فراهم ڪرڻ جي اختيار سان
- init [T [L]] - شروع ڪرڻ لاءِ T لائينن سان رواداري ۽ L لائينن سان شروع ڪريو (ڊفالٽ: T=1، L=1000)
- chan[nel] C - چينل سي کان سگنل ڳڻيو (1 کان 3، ڊفالٽ: 3)
- مدد - استعمال ڏيکاري ٿو
- سيٽ - سيٽبل پيٽرولز جي موجوده قدر ڏيکاري ٿو
- ڏيکاريو - هلندڙ ڳڻپ جي ترقي ڏيکاري ٿو جنهن ۾ گذري ويو وقت
- اعلي - ڊفالٽ سگنل جي سطح کي HIGH (3.3 V) سيٽ ڪري ٿو
- گھٽ - مقرر ڪري ٿو ڊفالٽ سگنل جي سطح کي LOW (0 V)
- led1|2 آن|آف - بند ڪريو LED1|2 آن يا آف
- out1|2|3 آن|آف - بند ڪريو OUT1|2|3 آن (HIGH) يا بند (LOW)
- tol[erance] T - ٽارگيٽ تائين پهچڻ لاءِ ڳڻيل سگنلن لاءِ رواداري (ڊفالٽ: T=1)
- استعمال ڪيو يو - ڳڻپ واري واقعي کان پوءِ آئوٽ پٽ ليول کي LOW کان HIGH تائين واپس ڪرڻ لاءِ مائڪرو سيڪنڊن ۾ وقت (ڊفالٽ: U = 0)
- پڄاڻي | ختم ڪرڻ | اسٽاپ - ھدف تائين پهچڻ کان اڳ جاري ڳڻپ کي ختم ڪريو
- verbose [false|true] - فعل کي ٽوگل ڪري ٿو. استعمال ڪريو دليل صحيح جو غلط
N واقعن کي ڳڻڻ شروع ڪرڻ لاءِ، صرف N داخل ڪرڻ ڪافي آھي. حڪم جاري ڪرڻ کان پوءِ، ڳڻپ شروع ٿئي ٿي ۽ ٻاھرين سگنل کي HIGH (3.3 V) تي مقرر ڪيو ويو آھي. پيراميٽر L لڪيرن جو تعداد آهي (پلس) ڳڻڻ لاءِ اڳي ئي ٽريگر سگنل پيدا ڪرڻ کان اڳ لاڳاپيل آئوٽ OUT1، OUT2 يا OUT3. اهو عمل N cycles لاء بار بار ڪيو ويندو آهي.
ٻاھر نڪرڻ واري سگنل جي مدت، يعني. سوئچ HIGH-LOW-HIGH، ڪنٽرولر جي سي پي يو جي رفتار سان سنڀاليو ويندو آهي ۽ اٽڪل 5 مائڪرو سيڪنڊن جو آهي. ڪمانڊ استعمال ڪندي مدت کي تبديل ڪري سگھجي ٿو "usec U" جتي U آهي سگنل جي مدت مائڪرو سيڪنڊن ۾ ۽ ڊفالٽ 0 تائين. جيڪڏھن سڀ N ڳڻپ مڪمل ٿي وڃن، ٻاھر سيٽ ڪيو ويندو آھي LOW ۽ ڪنٽرولر بيڪار حالت ڏانھن موٽندو آھي.
ڳڻپ ڪرڻ وقت، LED1 ۽ LED2 آن ٿي ويا آهن. جيڪڏهن ڳڻپ جو طريقو فعال آهي، لڪيرن کي ڳڻڻ لاءِ وڌيڪ حڪمن کي نظرانداز ڪيو ويو آهي. 1 کان وڌيڪ چينل تي هڪ ئي وقت لائينون ڳڻڻ ممڪن ناهي.
Exampاليزي:
چينل 4 تي 250 ڀيرا 3 لائينون ڳڻڻ لاءِ، حڪم جاري ڪريو ”4 250 3“. توھان کي ڪجھ موٽ ملندي جھڙي طرح:
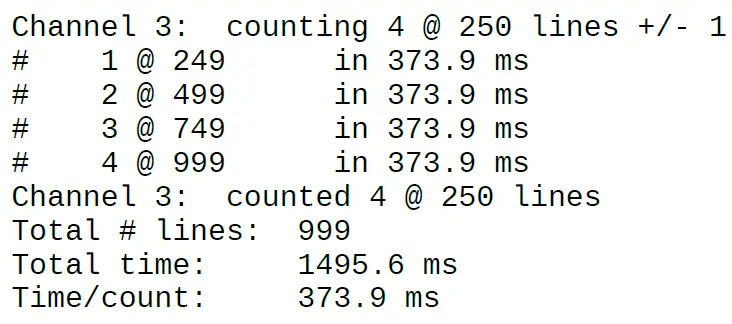
جيئن ڏسي سگھجي ٿو، اوزار واپسي وقت گذري ويو ۽ ڪل نمبر. ڳڻپيوڪر لائنن جو. لائينن جو ڪل تعداد يا ته مثبت يا منفي هوندو، حرڪت جي هدايت کي اشارو ڪندي. دال جو تعداد ڳڻيو ويندو، جيتوڻيڪ، ھميشه مثبت نمبر طور ڏنو ويندو، بغير حرڪت جي حقيقي هدايت جي.
رابطو
ڇا توھان وٽ سسٽم يا ان جي استعمال بابت سوال آھن، مھرباني ڪري اسان سان فون يا اي ميل ذريعي رابطو ڪريو.
marXperts GmbH
- ورڪسٽر. 3 22844 Norderstedt / جرمني
- ٽيليفون: +49 (40) 529 884 - 0
- فيڪس: +49 (40) 529 884 - 20
- info@marxperts.com
- www.marxperts.com
ڪاپي رائيٽ 2024 marXperts GmbH
سڀ حق محفوظ آهن.
دستاويز / وسيلا
 |
marXperts Quadrature Decoder for Incremental Encoders [pdf] استعمال ڪندڙ دستياب v1.1، واڌو انڪوڊرز لاءِ ڪواڊريچر ڊيڪوڊر، چوٿون، واڌارو انڪوڊرز لاءِ ڊيڪوڊر، انڪريمينٽل انڪوڊرز، انڪوڊرز |