တိုးမြင့်ကုဒ်ပြောင်းသူများအတွက် marXperts လေးပုံတပုံ ဒီကုဒ်ဒါ

ထုတ်ကုန်အချက်အလက်
သတ်မှတ်ချက်များ
- ထုတ်ကုန်အမည်- marquadb
- ဗားရှင်း- v1.1
- အမျိုးအစား- တိုးမြင့်ကုဒ်ပြောင်းသူများအတွက် Quadrature ဒီကုဒ်ဒါ
- ထုတ်လုပ်သူ- marXperts GmbH
ထုတ်ကုန်အချက်အလက်
marquadb သည် တိုးမြင့်ကုဒ်ပြောင်းသူများအတွက် ဒီဇိုင်းထုတ်ထားသော လေးပုံတစ်ပုံ ကုဒ်ဒါတစ်ခုဖြစ်သည်။ ၎င်းတွင် marquadb controller box အပါအဝင် ဟာ့ဒ်ဝဲ အစိတ်အပိုင်းများ ပါဝင်သည်။ စက်ပစ္စည်းသည် USB-B ချိတ်ဆက်ကိရိယာနှင့် D-Sub3 ချိတ်ဆက်ကိရိယာမှတစ်ဆင့် တိုးမြင့်ကုဒ်နံပါတ် 9 ခုအထိ ချိတ်ဆက်မှုကို ခွင့်ပြုသည်။
မူရင်း voltage ဆက်တင်များသည် 0.0 ဗို့နှင့် 3.3 ဗို့တွင် HIGH ရှိပြီး လိုအပ်ပါက အဆင့်များကို ပြောင်းပြန်လှန်ရန် ရွေးချယ်ခွင့်ရှိသည်။ စက်ပစ္စည်းသည် အချိန်နှင့်တပြေးညီမဟုတ်ပါ၊ 5 မိုက်ခရိုစက္ကန့်ဝန်းကျင်တွင် အနိမ့်နှင့်အမြင့်အကြား ကူးပြောင်းချိန်ပါရှိပြီး အထွက်အချက်ပြမှုကြာချိန်ကို ချိန်ညှိနိုင်သည်။
အမြဲမေးလေ့ရှိသောမေးခွန်းများ
- Q: voltage အဆင့်များသည် marquadb တွင် ပြောင်းပြန်ဖြစ်ပါသလား။
- A: ဟုတ်ကဲ့၊ vol ကို ပြောင်းပြန်လှန်လို့ရပါတယ်။tagဆန္ဒရှိလျှင် marquadb ပေါ်တွင် e အဆင့်များ။
- Q: marquadb သို့ တိုးမြင့်ကုဒ်နံပါတ်မည်မျှချိတ်ဆက်နိုင်သနည်း။
- A: marquadb သည် D-Sub3 ချိတ်ဆက်မှုမှတစ်ဆင့် တိုးမြင့်ကုဒ်နံပါတ် 9 ခုအထိ ချိတ်ဆက်နိုင်သည်။
ဒီလက်စွဲစာအုပ်ကို ဘယ်လိုသုံးမလဲ။
marquadb ဘောက်စ်ကို သင်မစတင်မီ အသုံးပြုသူလက်စွဲနှင့် စာရွက်စာတမ်းထုပ်ပိုးမှုပက်ကေ့ဂျ်တွင်ပါရှိသော နည်းပညာဆိုင်ရာစာရွက်စာတမ်းများကို ဂရုတစိုက်ဖတ်ပါ။
ကြေငြာချက်များ
ဥရောပ![]()
တူရိယာသည် EMC ညွှန်ကြားချက်များ 2014/30/EU နှင့် ကိုက်ညီသည်၊ နိမ့်သော Volumetage ညွှန်ကြားချက် 2014/35/EU အပြင် RoHS ညွှန်ကြားချက် 3032/2012။
European Communities ၏တရားဝင်ဂျာနယ်တွင်ဖော်ပြထားသောအောက်ပါသတ်မှတ်ချက်များနှင့်ကိုက်ညီမှုဖြင့်လိုက်နာမှုကိုပြသခဲ့သည်-
- EN61326-1: 2018 (လျှပ်စစ်အန္တရာယ်ကင်းရှင်းရေး)
- EN301 489-17- V3.1.1: 2017 (ရေဒီယိုပစ္စည်းကိရိယာနှင့် ဝန်ဆောင်မှုများအတွက် EMC)
- EN301 48901 V2.2.3: 2019 (ရေဒီယိုပစ္စည်းကိရိယာနှင့် ဝန်ဆောင်မှုများအတွက် EMC)
- EN300 328 V2.2.2: 2019 (2.4 GHz ကြိုးဝိုင်းရှိ ကြိုးမဲ့ ဂီယာစနစ်)
- EN6300- 2018 (RoHS)
မြောက်အမေရိက![]()
FCC စည်းမျဉ်းများ၏ အပိုင်း 15 အရ class B ဒစ်ဂျစ်တယ်စက်ပစ္စည်းအတွက် သတ်မှတ်ချက်များနှင့်ကိုက်ညီကြောင်း တွေ့ရှိပြီး ဒစ်ဂျစ်တယ်စက်ပစ္စည်းများအတွက် Canadian Interference ဖြစ်စေသည့် Equipment Standard ICES-003 ၏ လိုအပ်ချက်များအားလုံးကို ဖြည့်ဆည်းထားသည်။
အမှိုက်လျှပ်စစ်နှင့် အီလက်ထရွန်းနစ် ညွှန်ကြားချက်
အသုံးပြုသူများသည် စွန့်ပစ်ပစ္စည်းများအား စွန့်ပစ်မှုအတွက် အခကြေးငွေမယူဘဲ စွန့်ပစ်ရန်အတွက် Marxperts GmbH သို့ ပြန်ပေးနိုင်ပါသည်။
ဤကမ်းလှမ်းချက်သည် အောက်ပါအခြေအနေများအောက်တွင်သာ အကျုံးဝင်သည်-
- ယူနစ်ကို EU အတွင်းရှိ ကုမ္ပဏီ သို့မဟုတ် အဖွဲ့အစည်းတစ်ခုထံ ရောင်းချပြီးဖြစ်သည်။
- ယူနစ်ကို EU အတွင်းရှိ ကုမ္ပဏီ သို့မဟုတ် အဖွဲ့အစည်းတစ်ခုမှ ပိုင်ဆိုင်သည်။
- ယူနစ်သည် ပြီးပြည့်စုံပြီး ညစ်ညမ်းခြင်းမရှိပါ။
ကိရိယာတွင် ဘက်ထရီမပါဝင်ပါ။ ထုတ်လုပ်သူထံ ပြန်မအပ်ပါက အီလက်ထရွန်နစ်ပစ္စည်းကိရိယာများ စွန့်ပစ်ခြင်းအတွက် ဒေသဆိုင်ရာ စည်းမျဉ်းများကို လိုက်နာရန် ပိုင်ရှင်၏ တာဝန်ဖြစ်သည်။
လုပ်ဆောင်ချက်
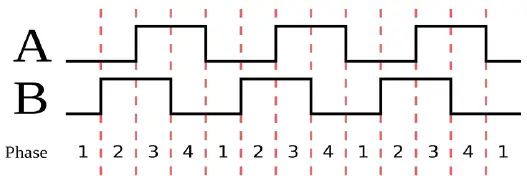
marquadb box သည် incremental encoders များမှ အချက်ပြမှုများ ("A quad B") ကို ရေတွက်သည့် microcontroller တစ်ခုဖြစ်သည်။ Incremental encoders များသည် အထွက်အချက်ပြလှိုင်း 2 ခု၊ A နှင့် B ပါရှိသော linear သို့မဟုတ် rotary electromechanical ကိရိယာများဖြစ်ပြီး၊ စက်ပစ္စည်းကို ရွှေ့သည့်အခါ pulses ကိုထုတ်ပေးပါသည်။ တိုးမြင့်သောကုဒ်နံပါတ်များသည် အနေအထားတိုးလာမှုများကို ချက်ချင်းနီးပါးအစီရင်ခံပြီး ၎င်းတို့အား အချိန်နှင့်တပြေးညီ မြန်နှုန်းမြင့်ယန္တရားများ၏ ရွေ့လျားမှုများကို စောင့်ကြည့်နိုင်စေပါသည်။ A နှင့် B အချက်ပြမှုသည် ရွေ့လျားမှုတစ်ခု၏တိုးတက်မှုကို ပြသနေသော်လည်း A နှင့် B အကြား အဆင့်ပြောင်းလဲမှုသည် ရွေ့လျားမှု၏ ဦးတည်ချက်ကို ဆုံးဖြတ်ရန် ခွင့်ပြုသည်။ အထက်ဖော်ပြပါပုံတွင် အချက်ပြ B သည် A ကို ဦးဆောင်နေသောကြောင့် ရွေ့လျားမှု၏ ဦးတည်ချက်မှာ အနှုတ်ဖြစ်သည်။
marquadb box သည် ရင်းမြစ် 3 ခုအထိ အမှီအခိုကင်းစွာဖြင့် ပဲမျိုးစုံကို ရေတွက်သော်လည်း တပြိုင်နက်တည်းမဟုတ်ပါ။ ရေတွက်ခြင်းသည် လမ်းကြောင်း နှစ်ခုစလုံးတွင် အလုပ်လုပ်သည်။ ကိရိယာသည် ရွေ့လျားမှု၏ ဦးတည်ချက်နှင့် ရွေ့လျားမှု၏ အမြန်နှုန်းကို ရရှိနိုင်သည့် ပဲမျိုးစုံကို ရေတွက်ရန် ကြာမြင့်ချိန်ကို အစီရင်ခံမည်ဖြစ်သည်။ သို့သော်လည်း၊ mar quadb box ၏ တကယ့်လုပ်ဆောင်ချက်မှာ ပေးထားသော ပဲမျိုးစုံအရေအတွက်သို့ ရောက်ရှိပြီးနောက် လုပ်ဆောင်ချက်တစ်ခု စတင်ရန်ဖြစ်သည်။ အကွက်သည် အချက်ပြမှု (TTL ကဲ့သို့) ကို coaxial အထွက်များထဲမှ တစ်ခုသို့ ပေးပို့သည်။ coaxial output ၏အဆင့်သည် HIGH သို့မဟုတ် LOW ဖြစ်ပြီး အောက်ပါအတိုင်းဖြစ်သည်။
- အကွက်မရေတွက်လျှင် နိမ့်သည်။
- အကွက်ရေတွက်လျှင် HIGH
- ပဲမျိုးစုံရေတွက်ပြီးပါက LOW သို့ပြောင်းပါ။
- ချက်ခြင်း သို့မဟုတ် ပြင်ဆင်သတ်မှတ်နိုင်သော နှောင့်နှေးမှုပြီးနောက် HIGH သို့ ပြန်ပြောင်းပါ။
- အကွက်သည် ရေတွက်ခြင်း ရပ်သွားပါက နိမ့်သည်။
ပုံမှန်အားဖြင့် LOW သည် 0.0 Volt ဖြစ်ပြီး HIGH သည် 3.3 Volt ဖြစ်သည်။ ဆန္ဒရှိပါက အဆင့်များကို ပြောင်းပြန်လှန်နိုင်သည်။ marquadb box သည် အချိန်နှင့်တစ်ပြေးညီ တူရိယာတစ်ခုမဟုတ်ပါ။ LOW နှင့် HIGH အကြား ပြောင်းရန် အချိန်သည် ပြင်းအား 5 မိုက်ခရိုစက္ကန့် ၏ အစီအစဥ်အရ ဖြစ်သော်လည်း အထွက်အချက်ပြမှု၏ ကြာချိန်ကို တိုးမြှင့်နိုင်သည်။
ကိရိယာ၏ ယေဘူယျအသုံးပြုမှုမှာ ကုဒ်ပြောင်းကိရိယာတစ်ခုနှင့် ပေါင်းစပ်ထားသော မော်တာသည် ရွေ့လျားနေသောကြောင့် မည်သည့်ဟာ့ဒ်ဝဲအမျိုးအစားကိုမဆို အစပျိုးအချက်ပြမှုများကို ပေးဆောင်ရန်ဖြစ်သည်။ ပေးထားသော ပဲမျိုးစုံအရေအတွက်ကို ရေတွက်ပြီးနောက် အစပျိုးအချက်ပြမှုများကို ဖန်တီးပါမည်။ တူရိယာသည် မော်တာ၏ ရုပ်ပိုင်းဆိုင်ရာ ဂုဏ်သတ္တိများကို သိရန်မလိုအပ်ပါ။ ၎င်းသည် incremental encoder ၏ A နှင့် B pulses များကိုသာ ရေတွက်သည်။
Example- 1000 မီလီမီတာ ရွေ့လျားမှုနှုန်း 1 encoder pulses ပေးသည့် မော်တာသည် XNUMX mm ရွေ့လျားမှုတိုင်းပြီးနောက် ဓာတ်ပုံတစ်ပုံကို ရိုက်ကူးသည့် ကင်မရာကို အစပျိုးသင့်သည်။ ၎င်းသည် TTL-type trigger အချက်ပြမှုများကို လက်ခံနိုင်သည့် ကင်မရာတစ်ခု လိုအပ်သည်။
Hardware အစိတ်အပိုင်းများ
စက်ပစ္စည်းသည် အောက်ပါ အစိတ်အပိုင်းများဖြင့် ပို့ဆောင်သည်-
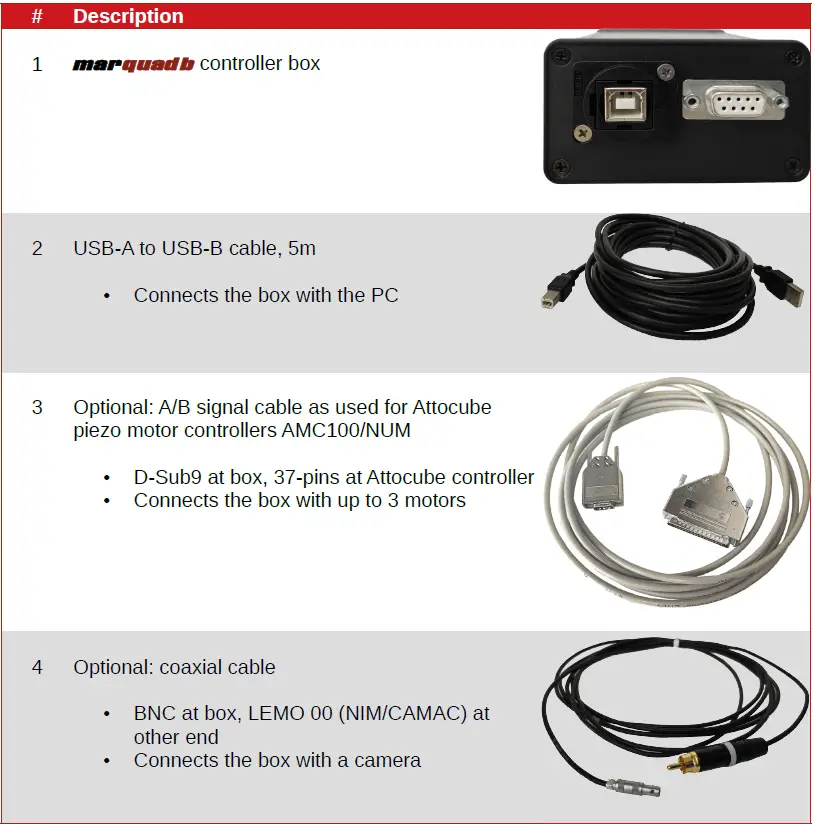
သွင်းအားစုများ
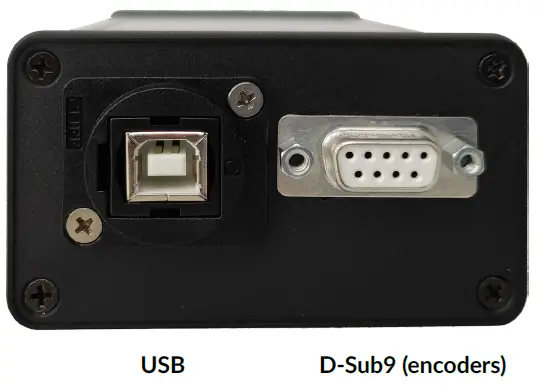
marquadb ဘောက်စ်တွင် အနောက်ဘက်တွင် USB-B ချိတ်ဆက်ကိရိယာအပြင် D-Sub9 ချိတ်ဆက်ကိရိယာပါရှိသည်။ ဘောက်စ်ကို USB ကြိုးကို အသုံးပြု၍ PC နှင့် ချိတ်ဆက်ရပါမည်။
A၊ B နှင့် မြေပြင်လိုင်းများကို 3-pin ချိတ်ဆက်ကိရိယာမှတစ်ဆင့် ထိန်းချုပ်ကိရိယာ 9 ခုအထိ တိုးမြှင့်ပေးသည်။
Pin assignments များကို အောက်ပါဇယားတွင် ပြထားသည်။
| တံ | ဟယ် | |
| 1 | ကုဒ်နံပါတ် 1- အချက်ပြ A | 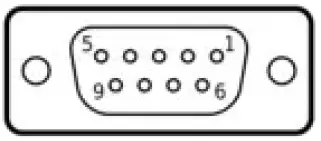
|
| 2 | ကုဒ်နံပါတ် 1- အချက်ပြ B | |
| 3 | ကုဒ်နံပါတ် 1- GND | |
| 4 | ကုဒ်နံပါတ် 2- အချက်ပြ A | |
| 5 | ကုဒ်နံပါတ် 2- အချက်ပြ B | |
| 6 | ကုဒ်နံပါတ် 2- GND | |
| 7 | ကုဒ်နံပါတ် 3- အချက်ပြ A | |
| 8 | ကုဒ်နံပါတ် 3- အချက်ပြ B | |
| 9 | ကုဒ်နံပါတ် 3- GND |
ရုပ်ထွက်များ
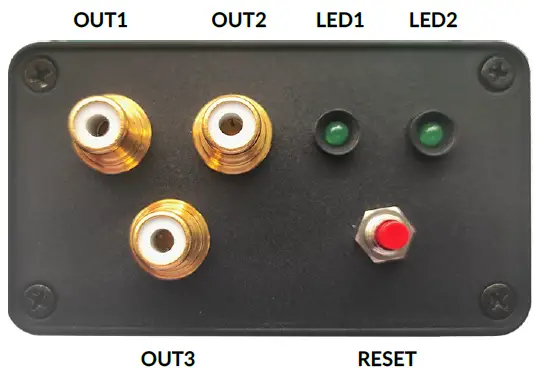
အထွက်အချက်ပြမှုများကို ပစ်မှတ်ကိရိယာ၊ ဥပမာ ကင်မရာဖြင့် ဘောက်စ် (ကြေးဝါရောင်ရှိသော ချိတ်ဆက်ကိရိယာ) ချိတ်ဆက်ရမည့် coaxial connectors များသို့ ပံ့ပိုးပေးပါသည်။ ထိန်းချုပ်ကိရိယာအား ရပ်တန့်သောအခါ၊ coaxial output ပေါ်ရှိ အထွက်သည် LOW (0.0 Volt) ဖြစ်သည်။ ထိန်းချုပ်ကိရိယာ စတင်ရေတွက်သောအခါ၊ အထွက်အချက်ပြမှုကို HIGH (3.3 Volt) ဟု သတ်မှတ်သည်။ ပေးထားသော အရေအတွက်ကို ကျော်လွန်ပြီးနောက်၊ အထွက် signal သည် LOW သို့ ကျဆင်းသွားသည်။ ဤအချက်ပြမှုကို ကင်မရာတစ်ခုမှ ဖတ်ရှုခြင်း သို့မဟုတ် အခြားဟာ့ဒ်ဝဲအမျိုးအစားအချို့တွင် လုပ်ဆောင်မှုအချို့ကို အစပျိုးရန် ဤအချက်ကို အသုံးပြုနိုင်သည်။ ဤလုပ်ဆောင်ချက်ကို သတ်မှတ်အကြိမ်အရေအတွက်အတိုင်း ထပ်ခါတလဲလဲ ပြုလုပ်ပါမည်။
HIGH-LOW-HIGH signal သို့ပြောင်းသည့်ကြာချိန်သည် ခန့်မှန်းခြေဖြစ်သည်။ 5 မိုက်ခရိုစက္ကန့်။ အချက်ပြမှုများကို ပြောင်းပြန်လှန်ရန် ဖြစ်နိုင်သည် (HIGH=0 V၊ LOW=3.3 V)။
Controller သည် အချက်ပြများကို ရေတွက်နေချိန်တွင် LED1 လင်းလာမည်ဖြစ်သည်။ သို့မဟုတ်ပါက controller သည် idle ဖြစ်သောအခါ LED1 ပိတ်ထားပါသည်။ LED2 သည် အလားတူ လည်ပတ်နေသော်လည်း အထွက်အချက်ပြလှိုင်းသည် မြင့်မားနေပြီး မဟုတ်ပါက ပိတ်မှသာ ဖွင့်ပါမည်။ HIGH နှင့် LOW အကြား ကူးပြောင်းချိန်သည် အလွန်တိုသောကြောင့်၊ LED နှစ်ခုစလုံးသည် ပုံမှန်အားဖြင့် တူညီနေပုံပေါ်သည်။
ခြားနားချက်ကို မြင်ရန် သတ်မှတ်နိုင်သော နှောင့်နှေးချိန်သည် အနည်းဆုံး 100 မီလီစက္ကန့် ဖြစ်ရပါမည်။
RESET ခလုတ်သည် USB ကြိုးကိုဖြုတ်ရန် အခြားရွေးချယ်စရာဖြစ်သည့် ထိန်းချုပ်ကိရိယာကို ပြန်လည်စတင်မည်ဖြစ်သည်။ စဖွင့်သောအခါ၊ LED1 သည် အဆက်မပြတ်လင်းနေချိန်တွင် LED5 သည် 2 ကြိမ်တုန်ခါသည်။ ကနဦးအဆင့်သတ်မှတ်ပြီးနောက်၊ LED နှစ်ခုလုံးကို ပိတ်သွားပါမည်။
ဆက်သွယ်ရေး
marquadb ထိန်းချုပ်ကိရိယာကို USB ချိတ်ဆက်မှု (USB-B မှ USB-A) မှတဆင့် ဒေတာစုဆောင်း PC မှ ထိန်းချုပ်ရပါမည်။ Controller သည် ရိုးရိုး ASCII အမိန့်များကို နားလည်သည့် သမားရိုးကျ serial interface ကို ထောက်ပံ့ပေးပြီး serial interface သို့ output ကို plain text strings အဖြစ် ပေးပို့သည်။
ထို့ကြောင့် ၎င်းသည် အကွက်ကို “ကိုယ်တိုင်” သို့မဟုတ် API တစ်ခုမှတစ်ဆင့် လုပ်ဆောင်ရန် ဖြစ်နိုင်သည်။ သင်သည် အမှတ်စဉ်ချိတ်ဆက်မှုများကို အသုံးပြုသည့် ပရိုဂရမ်အမျိုးမျိုး ဥပမာ- PuTTY on Windows သို့မဟုတ် Linux ရှိ minicom ကို အသုံးပြုနိုင်သည်။ အောက်ပါ အမှတ်စဉ် ချိတ်ဆက်မှု ဆက်တင်များကို အသုံးပြုပါ။
- baudrate: 115200
- ညီမျှခြင်း- မရှိပါ။
- မှတ်တိုင်များ- ၁
- bytesize: 8 bits
- flow-control- မရှိပါ။
Linux တွင်၊ သင်သည် အောက်ပါကဲ့သို့ ရိုးရှင်းသော command ကို စက်ပစ္စည်းဖြစ်ကြောင်း သေချာအောင် ပြုလုပ်နိုင်သည်။ file အသုံးပြုသူမှ ၎င်းကိုဖတ်ပြီး ၎င်းထံသို့ စာရေးရန် သင့်လျော်သောခွင့်ပြုချက်များရှိသည်။
- minicom -D /dev/ttyACM0 -b 115200
Linux OS တွင် /dev/ttyACM0 သည် ပုံမှန်စက်ပစ္စည်းအမည်တစ်ခုဖြစ်သည်။ Windows တွင် n သည် ဂဏန်းတစ်လုံးတည်းရှိသော COMn ဖြစ်လိမ့်မည်။
မှတ်ချက် - အောက်ဖော်ပြပါ ညွှန်ကြားချက်များကို အသုံးပြု၍ ဆက်သွယ်မှု API တစ်ခုကို အကောင်အထည်ဖော်သည့်အခါ၊ ၎င်းတို့ကို အသုံးမပြုသော်လည်း ထိန်းချုပ်ကိရိယာမှ ထုတ်လုပ်သည့် စာသားကြိုးများကို ဖတ်ရှုရန် သေချာစေပါ။
အမိန့်များ
ထိန်းချုပ်သူသည် အောက်ဖော်ပြပါ အမိန့်များကို နားလည်သည် (ကွင်းကွင်းအတွင်းရှိ ကြိုးများသည် စိတ်ကြိုက်ရွေးချယ်နိုင်သည်။
- N လိုင်းများ L ချန်နယ် C – L ကုဒ်ဒါလိုင်းများ (pulses) တစ်ခုစီဖြင့် N count အတွက် ရေတွက်ခြင်းမုဒ်သို့ ဝင်ရောက်ပါ (မူလ- N=0၊ L=1000၊ C=1)
- NL [C] - သော့ချက်စာလုံး "ရေတွက်ခြင်း" နှင့် "လိုင်းများ" မပါဘဲနှင့် ချန်နယ် 1 မှ 3 ကို ထောက်ပံ့ပေးရန် ရွေးချယ်ခွင့်နှင့်အတူ
- init [T [L]] – စတင်ရန် T လိုင်းများကို သည်းခံခြင်းနှင့် L လိုင်းများအဖြစ် စတင်ပါ (မူလ- T=1၊ L=1000)
- chan[nel] C – ချန်နယ် C မှ အချက်ပြမှုများကို ရေတွက်ပါ (1 မှ 3၊ ပုံသေ- 3)
- အကူအညီ - အသုံးပြုမှုကိုပြသသည်။
- set – settable parameters များ၏ လက်ရှိတန်ဖိုးများကို ပြသသည်။
- show – ကုန်လွန်သွားသော အချိန်အပါအဝင် ဆက်လက်ရေတွက်ခြင်း၏ တိုးတက်မှုကို ပြသသည်။
- မြင့်မားသည် – မူရင်းအချက်ပြအဆင့်ကို HIGH (3.3 V) သို့ သတ်မှတ်သည်
- low – မူရင်းအချက်ပြအဆင့်ကို LOW (0 V) သို့ သတ်မှတ်သည်
- led1|2 ဖွင့်|ပိတ်ခြင်း – LED1|2 အဖွင့်အပိတ်လုပ်ပါ။
- out1|2|3 on|off – OUT1|2|3 ဖွင့် (HIGH) သို့မဟုတ် ပိတ် (LOW)
- tol[erance] T – ပစ်မှတ်သို့ရောက်ရှိရန်အတွက် ရေတွက်ထားသော အချက်ပြမှုများကို သည်းခံနိုင်မှု (မူလ- T=1)
- usec U – ရေတွက်ခြင်းဖြစ်ရပ်တစ်ခုပြီးနောက် အထွက်အဆင့်ကို LOW မှ HIGH သို့ ပြန်ပြောင်းရန် မိုက်ခရိုစက္ကန့်အတွင်း အချိန် (ပုံမှန်- U = 0)
- အဆုံး | သားလျှော | ရပ်ပါ - ပစ်မှတ်သို့မရောက်မီ ဆက်လက်ရေတွက်ခြင်းကို အဆုံးသတ်ပါ။
- verbose [false|true] – စကားအပြောအဆို ပြောင်းသည်။ အငြင်းအခုံ True of False ကိုသုံးပါ။
N ဖြစ်ရပ်များကို စတင်ရေတွက်ရန် N တွင် ထည့်သွင်းရန် လုံလောက်ပါသည်။ အမိန့်ကို ထုတ်ပြန်ပြီးနောက် ရေတွက်ခြင်း စတင်ပြီး အထွက်အချက်ပြအချက်ပြမှုကို HIGH (3.3 V) ဟု သတ်မှတ်သည်။ ကန့်သတ်ဘောင် L သည် သက်ဆိုင်ရာ အထွက် OUT1၊ OUT2 သို့မဟုတ် OUT3 တွင် အစပျိုးအချက်ပြမှု မပြုလုပ်မီ ရေတွက်ရန် လိုင်းနံပါတ်များ (pulses) ဖြစ်သည်။ ဤလုပ်ငန်းစဉ်သည် N သံသရာအတွက် ထပ်ခါတလဲလဲဖြစ်သည်။
output signal ၏ကြာချိန်ကို ဆိုလိုပါသည်။ ခလုတ်ကို HIGH-LOW-HIGH၊ controller ၏ CPU အမြန်နှုန်းဖြင့် ထိန်းချုပ်ထားပြီး 5 microseconds ခန့်ဖြစ်သည်။ U သည် မိုက်ခရိုစက္ကန့်များတွင် အချက်ပြမှုကြာချိန်ဖြစ်ပြီး 0 သို့ ပုံသေသတ်မှတ်ထားသည့် command "usec U" ကိုအသုံးပြု၍ ကြာချိန်ကို ပြောင်းလဲနိုင်သည်။ N အားလုံးကို ပြီးသွားပါက၊ အထွက်အား LOW ဟုသတ်မှတ်ထားပြီး ထိန်းချုပ်ကိရိယာသည် idle အခြေအနေသို့ ပြန်သွားမည်ဖြစ်သည်။
ရေတွက်နေစဉ်တွင် LED1 နှင့် LED2 ကိုဖွင့်ထားသည်။ ရေတွက်ခြင်းမုဒ်သည် အသက်ဝင်နေပါက၊ လိုင်းရေတွက်ရန် နောက်ထပ်အမိန့်တော်အားလုံးကို လျစ်လျူရှုထားသည်။ ချန်နယ် 1 လိုင်းထက်ပိုသော လိုင်းများကို တစ်ပြိုင်နက် ရေတွက်ရန် မဖြစ်နိုင်ပါ။
Example-
ချန်နယ် 4 တွင် လိုင်း 250 ကို 3 ကြိမ်ရေတွက်ရန် "4 250 3" အမိန့်ကိုထုတ်ပါ။ သင်နှင့် အလားတူသော တုံ့ပြန်ချက်အချို့ကို ရရှိလိမ့်မည်-
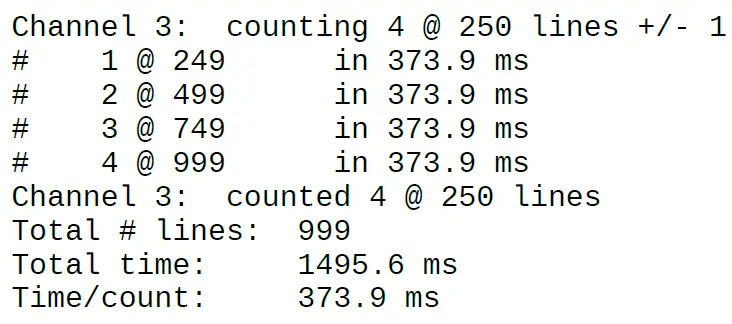
မြင်နိုင်သကဲ့သို့၊ ကိရိယာသည် ကုန်လွန်ခဲ့သောအချိန်နှင့် စုစုပေါင်းအမှတ်ကို ပြန်ပေးသည်။ ရေတွက်သောလိုင်းများ။ ရွေ့လျားမှု၏ ဦးတည်ချက်ကို ညွှန်ပြသော မျဉ်းကြောင်း စုစုပေါင်း အရေအတွက်သည် အပြုသဘော သို့မဟုတ် အနုတ်လက္ခဏာ ဖြစ်လိမ့်မည်။ သို့သော် ရေတွက်ရမည့် ပဲမျိုးစုံအရေအတွက်ကို ရွေ့လျားမှု၏ အမှန်တကယ် ဦးတည်ချက်မမူဘဲ အမြဲတမ်း အပြုသဘောဆောင်သည့် ဂဏန်းအဖြစ် ပေးမည်ဖြစ်သည်။
ဆက်သွယ်ရန်
စနစ် သို့မဟုတ် ၎င်း၏အသုံးပြုမှုနှင့်ပတ်သက်ပြီး သင့်တွင် မေးခွန်းများရှိပါက၊ ကျေးဇူးပြု၍ ဖုန်း သို့မဟုတ် အီးမေးလ်မှတစ်ဆင့် ကျွန်ုပ်တို့ထံ ဆက်သွယ်ပါ။
marXperts GmbH
- Werkstr 3 22844 Norderstedt / Germany
- ဖုန်း။ +၄၉ (၀) ၅၃၁ ၂၈၈၇၄ – ၂၂
- ဖက်စ်- +၄၉ (၀) ၅၃၁ ၂၈၈၇၄ – ၂၂
- info@marxperts.com
- www.marxperts.com
မူပိုင်ခွင့် 2024 marXperts GmbH
မူပိုင်ခွင့်ကိုလက်ဝယ်ထားသည်။
စာရွက်စာတမ်းများ / အရင်းအမြစ်များ
 |
တိုးမြင့်ကုဒ်ပြောင်းသူများအတွက် marXperts လေးပုံတပုံ ဒီကုဒ်ဒါ [pdf] အသုံးပြုသူလက်စွဲ v1.1၊ တိုးမြင့်ကုဒ်ပြောင်းသူများအတွက် လေးပုံတစ်ပုံ ဒီကုဒ်ဒါ၊ |