marXperts インクリメンタル エンコーダ用直交デコーダ

製品情報
仕様
- 製品名: マルクワッド
- バージョン: バージョン1.1
- タイプ: インクリメンタルエンコーダ用直交デコーダ
- メーカー: マルエクスパート株式会社
製品情報
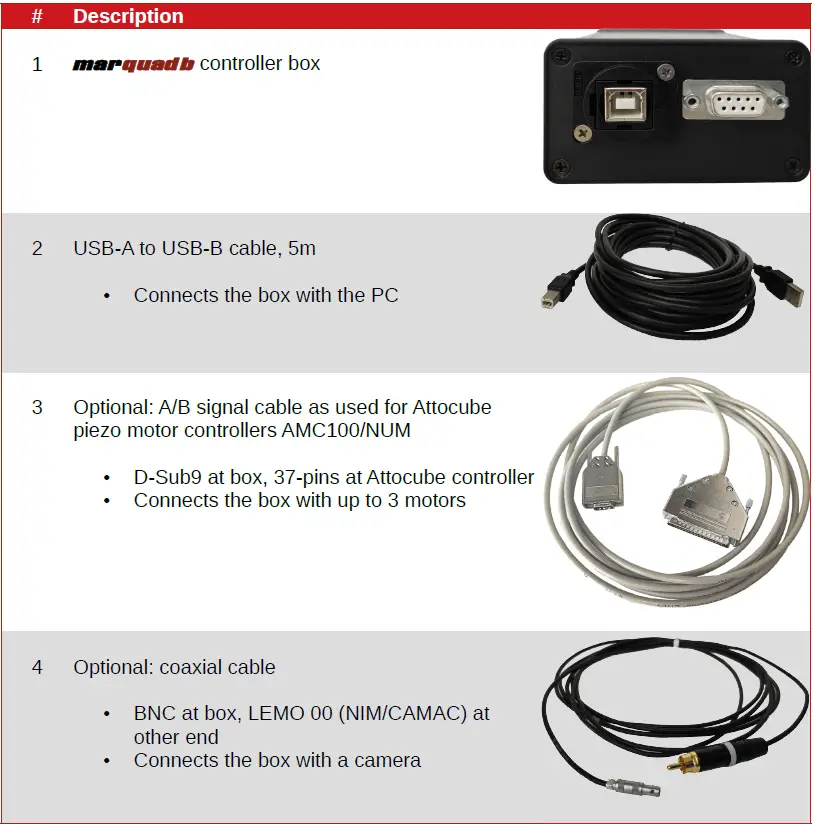
marquadb は、インクリメンタル エンコーダ用に設計された直交デコーダです。marquadb コントローラ ボックスなどのハードウェア コンポーネントを備えています。このデバイスでは、USB-B コネクタと D-Sub3 コネクタを介して最大 9 つのインクリメンタル エンコーダを接続できます。
デフォルトのボリュームtag設定は LOW が 0.0 ボルト、HIGH が 3.3 ボルトで、必要に応じてレベルを反転するオプションがあります。デバイスはリアルタイムではなく、LOW と HIGH 間の切り替え時間は約 5 マイクロ秒ですが、出力信号の持続時間を長くするために調整できます。
よくある質問
- Q: ボリュームはtagマーカッドブでレベルが逆転しますか?
- A: はい、ボリュームを逆転させることは可能ですtag必要に応じて、marquadb の e レベルを設定します。
- Q: marquadb に接続できるインクリメンタル エンコーダーの数はいくつですか?
- A: marquadb は、D-Sub3 コネクタを介して最大 9 つのインクリメンタル エンコーダを接続できます。
このマニュアルの使い方
marquadb ボックスの操作を開始する前に、ドキュメント パッケージに含まれているユーザー マニュアルと技術ドキュメントをよくお読みください。
宣言
ヨーロッパ![]()
この機器は、EMC指令2014/30/EU、低電圧指令に準拠しています。tage 指令 2014/35/EU および RoHS 指令 3032/2012 に準拠しています。
コンプライアンスは、欧州共同体の官報に記載されている以下の仕様に準拠することで実証されました。
- EN61326-1: 2018 (電気安全)
- EN301 489-17: V3.1.1: 2017 (無線機器およびサービスのEMC)
- EN301 48901 V2.2.3: 2019 (無線機器およびサービスのEMC)
- EN300 328 V2.2.2: 2019 (2.4GHz帯の広帯域伝送システム)
- EN6300: 2018 (RoHS)
北米![]()
この機器は、FCC 規則のパート 15 に準拠したクラス B デジタル デバイスの仕様に準拠していることが確認されており、デジタル デバイスに関するカナダの干渉発生装置規格 ICES-003 のすべての要件を満たしています。
電気電子機器廃棄物指令
エンドユーザーは、廃棄費用を請求されることなく、機器を Marxperts GmbH に返却して廃棄することができます。
このオファーは以下の条件に従ってのみ有効です:
- ユニットはEU内の企業または機関に販売されている
- 当該ユニットは現在EU内の企業または機関によって所有されている
- ユニットは完全であり、汚染されていない
この機器には電池は付属していません。製造元に返却しない場合は、電子機器の廃棄に関する現地の規則に従うのは所有者の責任となります。
関数
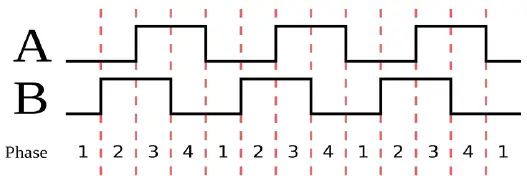
marquadb ボックスは、インクリメンタル エンコーダからの信号 (「A quad B」) をカウントするマイクロコントローラです。インクリメンタル エンコーダは、デバイスが移動したときにパルスを発する 2 つの出力信号 (A と B) を持つリニアまたは回転式の電気機械デバイスです。インクリメンタル エンコーダは位置の増分をほぼ瞬時に報告するため、高速メカニズムの動きをほぼリアルタイムで監視できます。A 信号と B 信号のいずれかが動きの進行状況を示しますが、A と B 間の位相シフトによって動きの方向を判断できます。上の図では、信号 B が A より進んでいるため、動きの方向は負です。
marquadb ボックスは、最大 3 つのソースからのパルスを独立してカウントしますが、同時にカウントすることはできません。カウントはどちらの方向にも機能します。機器は、移動の方向と、移動速度を導き出すためのパルスをカウントするのにかかった時間を報告します。ただし、mar quadb ボックスの実際の機能は、指定されたパルス数に達した後にアクションをトリガーすることです。ボックスは、信号 (TTL のような) を同軸出力の XNUMX つに送ります。同軸出力のレベルは HIGH または LOW のいずれかで、次のようになります。
- ボックスがカウントされていない場合はLOW
- ボックスがカウントしている場合はHIGH
- パルス数がカウントされたらLOWに切り替える
- すぐにまたは設定可能な遅延後にHIGHに戻す
- ボックスがカウントを停止した場合はLOW
デフォルトでは、LOW は 0.0 ボルト、HIGH は 3.3 ボルトを意味します。必要に応じてレベルを反転できます。marquadb ボックスはリアルタイム機器ではありません。LOW と HIGH を切り替える時間は 5 マイクロ秒程度ですが、出力信号の持続時間を長くすることは可能です。
この機器の一般的な用途は、エンコーダーに接続されたモーターが動いているときに、あらゆる種類のハードウェアにトリガー信号を提供することです。トリガー信号は、指定された数のパルスをカウントした後に生成されます。この機器は、モーターの物理的特性について知る必要はありません。増分エンコーダーの A パルスと B パルスをカウントするだけです。
Examp上: 1000 mm の移動ごとに 1 個のエンコーダ パルスを出力するモーターは、XNUMX mm の移動ごとに写真を撮影するカメラをトリガーする必要があります。これには、TTL タイプのトリガー信号を受信できるカメラが必要です。
ハードウェアコンポーネント
デバイスには次のコンポーネントが同梱されています。
入力
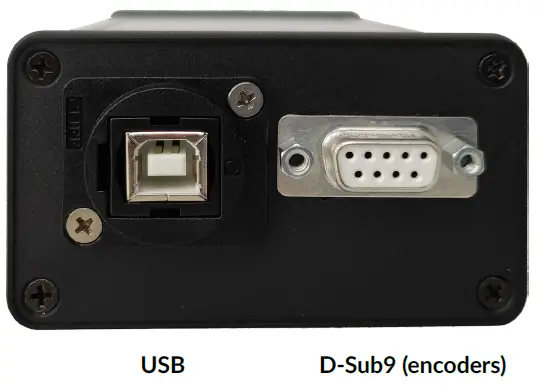
marquadb ボックスには、背面に USB-B コネクタと D-Sub9 コネクタが備わっています。ボックスは、USB ケーブルを使用して PC に接続する必要があります。
最大 3 つのインクリメンタル エンコーダからの A、B、およびグランド ラインは、9 ピン コネクタを介してコントローラに供給されます。
ピンの割り当ては以下の表に示します。
| ピン | 割り当て | |
| 1 | エンコーダ1: 信号A | 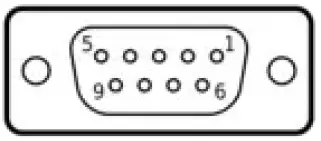
|
| 2 | エンコーダ1: 信号B | |
| 3 | エンコーダ1: GND | |
| 4 | エンコーダ2: 信号A | |
| 5 | エンコーダ2: 信号B | |
| 6 | エンコーダ2: GND | |
| 7 | エンコーダ3: 信号A | |
| 8 | エンコーダ3: 信号B | |
| 9 | エンコーダ3: GND |
出力
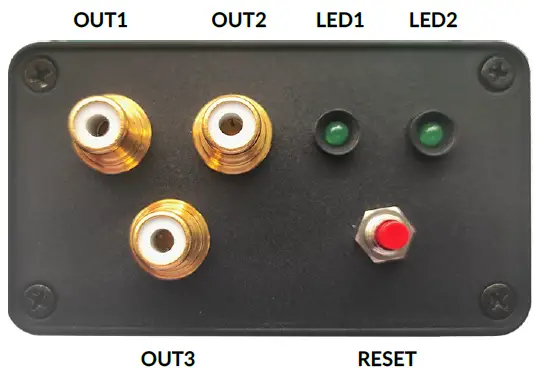
出力信号は、ボックス (真鍮色のコネクタ) をカメラなどの対象デバイスに接続する必要がある同軸コネクタに供給されます。コントローラがアイドル状態のとき、同軸出力の出力は LOW (0.0 ボルト) です。コントローラがカウントを開始すると、出力信号は HIGH (3.3 ボルト) に設定されます。指定されたカウント数に達すると、出力信号は LOW に低下します。この信号は、カメラの読み出しや他の種類のハードウェアでの何らかのアクションをトリガーするために使用できます。この操作は、指定された回数だけ繰り返されます。
信号が HIGH-LOW-HIGH に切り替わる時間は約 5 マイクロ秒です。信号を反転することも可能です (HIGH=0 V、LOW=3.3 V)。
コントローラが信号をカウントしているとき、LED1 が点灯します。それ以外の場合、コントローラがアイドル状態のとき、LED1 はオフになります。LED2 も同様に動作しますが、出力信号が HIGH の場合にのみオンになり、それ以外の場合はオフになります。HIGH と LOW の間の切り替え時間は非常に短いため、通常は両方の LED が同じように見えます。
違いを確認するには、設定可能な遅延時間は少なくとも 100 ミリ秒である必要があります。
RESET ボタンは、USB ケーブルを抜く代わりにコントローラーを再起動します。起動時に、LED1 が 5 回点滅し、LED2 が点灯し続けます。初期化シーケンスの後、両方の LED がオフになります。
コミュニケーション
marquadb コントローラは、USB 接続 (USB-B から USB-A) を介してデータ収集 PC から制御する必要があります。コントローラは、プレーン ASCII コマンドを理解し、プレーン テキスト文字列としてシリアル インターフェイスに出力を送信する従来のシリアル インターフェイスを提供します。
したがって、ボックスを「手動」または API 経由で操作することが可能です。Windows の PuTTY や Linux の minicom など、シリアル接続を使用するさまざまなプログラムを使用できます。次のシリアル接続設定を使用してください。
- ボーレート: 115200
- パリティ: なし
- ストップビット: 1
- バイトサイズ: 8 ビット
- フロー制御: なし
Linuxでは、次のような簡単なコマンドを実行して、デバイスが file ユーザーが読み取りおよび書き込みを行うための適切な権限があります。
- ミニコム -D /dev/ttyACM0 -b 115200
Linux OS では、/dev/ttyACM0 が一般的なデバイス名になります。Windows では、COMn (n は XNUMX 桁の数字) になります。
注記: 以下のコマンドを使用して通信 API を実装する場合は、コントローラーによって生成されたテキスト文字列も、使用しない場合でも必ず読み取るようにしてください。
コマンド
コントローラは次のコマンドを理解します (括弧内の文字列はオプションです)。
- N ラインをカウントします L チャネル C - チャネル C でそれぞれ L エンコーダ ライン (パルス) を使用して N カウントのカウント モードに入ります (デフォルト: N=0、L=1000、C=1)
- NL [C] – 上記と同様ですが、キーワード「counts」と「lines」がなく、チャネル1から3を供給するオプションがあります。
- init [T [L]] – T 行を許容値として、L 行を開始行として初期化します (デフォルト: T=1、L=1000)
- チャネル[ネル] C – チャネルCからの信号をカウントします(1~3、デフォルト: 3)
- ヘルプ – 使用方法を表示します
- set – 設定可能なパラメータの現在の値を表示します
- 表示 – 経過時間を含む進行中のカウントの進行状況を表示します
- high – デフォルトの信号レベルをHIGH(3.3 V)に設定します。
- low – デフォルトの信号レベルをLOW (0 V)に設定します。
- led1|2 on|off – LED1|2 をオンまたはオフにする
- out1|2|3 on|off – OUT1|2|3 をオン (HIGH) またはオフ (LOW) にします
- tol[erance] T – 目標到達までのカウント信号の許容値(デフォルト: T=1)
- usec U – カウントイベント後に出力レベルをLOWからHIGHに戻すまでの時間(マイクロ秒)(デフォルト:U = 0)
- 終了 | 中止 | 停止 – 目標に到達する前に進行中のカウントを終了します
- verbose [false|true] – 冗長性を切り替えます。引数TrueまたはFalseを使用します。
N イベントのカウントを開始するには、N を入力するだけで十分です。コマンドを発行すると、カウントが開始され、出力信号が HIGH (3.3 V) に設定されます。パラメータ L は、対応する出力 OUT1、OUT2、または OUT3 でトリガー信号を生成する前にカウントするライン (パルス) の数です。このプロセスは N サイクル繰り返されます。
出力信号の持続時間、つまり HIGH-LOW-HIGH の切り替えは、コントローラの CPU 速度によって制御され、約 5 マイクロ秒です。持続時間はコマンド「usec U」を使用して変更できます。ここで、U はマイクロ秒単位の信号の持続時間で、デフォルトは 0 です。すべての N カウントが完了すると、出力は LOW に設定され、コントローラはアイドル状態に戻ります。
カウント中は、LED1 と LED2 がオンになります。カウント モードがアクティブな場合、ラインをカウントするためのそれ以降のすべてのコマンドは無視されます。1 つ以上のチャネルで同時にラインをカウントすることはできません。
Examp上:
チャネル 4 で 250 倍の 3 行をカウントするには、コマンド「4 250 3」を発行します。次のようなフィードバックが返されます。
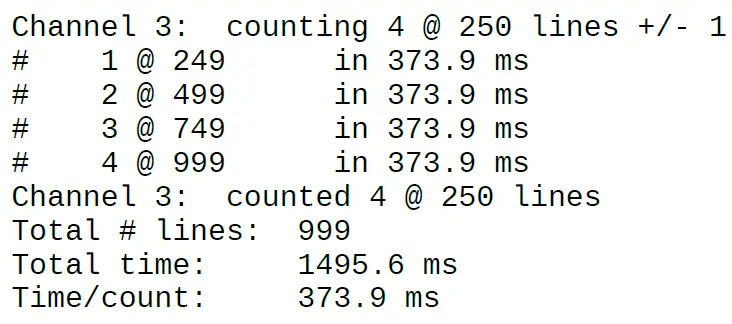
ご覧のとおり、計測器は経過時間とカウントされたラインの合計数を返します。ラインの合計数は正または負のいずれかで、移動方向を示します。ただし、カウントされるパルス数は、実際の移動方向に関係なく、常に正の数として示されます。
接触
システムやその使用に関してご質問がございましたら、電話またはメールでお問い合わせください。
マルエクスパート株式会社
著作権 2024 marXperts GmbH
無断転載を禁じます。
ドキュメント / リソース
 |
marXperts インクリメンタル エンコーダ用直交デコーダ [pdf] ユーザーマニュアル v1.1、インクリメンタル エンコーダ用直交デコーダ、直交、インクリメンタル エンコーダ用デコーダ、インクリメンタル エンコーダ、エンコーダ |