marXperts Quadrature Decoder สำหรับตัวเข้ารหัสแบบเพิ่มหน่วย

ข้อมูลสินค้า
ข้อมูลจำเพาะ
- ชื่อสินค้า : มาร์ควอดบี
- เวอร์ชัน: v1.1
- พิมพ์: ตัวถอดรหัสการสร้างพื้นที่สี่เหลี่ยมจัตุรัสสำหรับตัวเข้ารหัสแบบเพิ่มหน่วย
- ผู้ผลิต: มาร์เอ็กซ์เพิร์ทส์ GmbH
ข้อมูลสินค้า
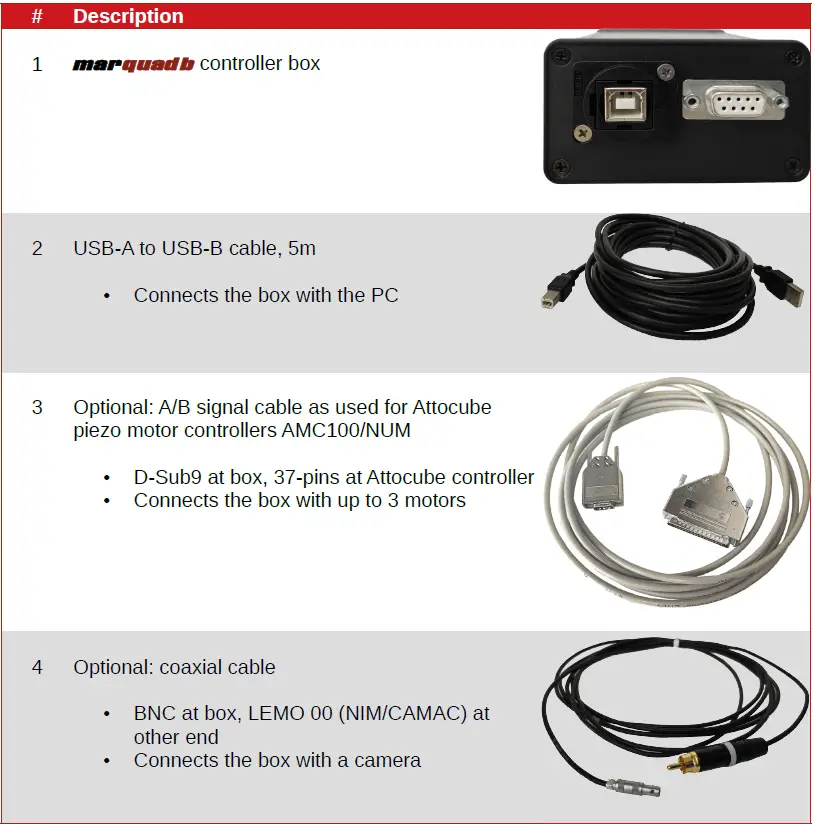
marquadb เป็นตัวถอดรหัสการสร้างพื้นที่สี่เหลี่ยมจัตุรัสที่ออกแบบมาสำหรับตัวเข้ารหัสส่วนเพิ่ม มีส่วนประกอบฮาร์ดแวร์ รวมถึงกล่องควบคุม marquadb อุปกรณ์ช่วยให้สามารถเชื่อมต่อตัวเข้ารหัสแบบเพิ่มได้สูงสุด 3 ตัวผ่านตัวเชื่อมต่อ USB-B และตัวเชื่อมต่อ D-Sub9
ค่าเริ่มต้น voltagการตั้งค่า e ต่ำที่ 0.0 โวลต์และสูงที่ 3.3 โวลต์ พร้อมตัวเลือกในการกลับระดับหากจำเป็น อุปกรณ์ไม่ใช่เรียลไทม์และมีเวลาในการสลับระหว่าง LOW และ HIGH ประมาณ 5 ไมโครวินาที ซึ่งสามารถปรับระยะเวลาสัญญาณเอาท์พุตให้นานขึ้นได้
คำถามที่พบบ่อย
- Q: สามารถฉบับtagระดับ e จะกลับกันบน marquadb หรือไม่?
- A: ใช่ เป็นไปได้ที่จะกลับปริมาตรtage ระดับบน marquadb หากต้องการ
- Q: สามารถเชื่อมต่อตัวเข้ารหัสแบบเพิ่มหน่วยกับ marquadb ได้กี่ตัว
- A: marquadb สามารถเชื่อมต่อตัวเข้ารหัสแบบเพิ่มหน่วยได้สูงสุด 3 ตัวผ่านตัวเชื่อมต่อ D-Sub9
วิธีใช้งานคู่มือนี้
ก่อนที่คุณจะเริ่มใช้งานกล่อง marquadb โปรดอ่านคู่มือผู้ใช้และเอกสารทางเทคนิคที่รวมอยู่ในชุดเอกสารอย่างละเอียด
คำประกาศ
ยุโรป![]()
เครื่องมือนี้สอดคล้องกับ EMC Directives 2014/30/EU, Low Voltage Directive 2014/35/EU และ RoHS directive 3032/2012
การปฏิบัติตามข้อกำหนดแสดงให้เห็นโดยการปฏิบัติตามข้อกำหนดต่อไปนี้ซึ่งระบุไว้ในวารสารอย่างเป็นทางการของชุมชนยุโรป:
- EN61326-1: 2018 (ความปลอดภัยทางไฟฟ้า)
- EN301 489-17: V3.1.1: 2017 (EMC สำหรับอุปกรณ์และบริการวิทยุ)
- EN301 48901 V2.2.3: 2019 (EMC สำหรับอุปกรณ์และบริการวิทยุ)
- EN300 328 V2.2.2: 2019 (ระบบส่งสัญญาณไวด์แบนด์ในย่านความถี่ 2.4 GHz)
- EN6300: 2018 (มาตรฐาน RoHS)
อเมริกาเหนือ![]()
พบว่าเครื่องมือนี้สอดคล้องกับข้อกำหนดจำเพาะสำหรับอุปกรณ์ดิจิทัลคลาส B ตามส่วนที่ 15 ของกฎ FCC และตรงตามข้อกำหนดทั้งหมดของมาตรฐานอุปกรณ์ที่ทำให้เกิดการรบกวนของแคนาดา ICES-003 สำหรับอุปกรณ์ดิจิทัล
คำสั่งขยะไฟฟ้าและอิเล็กทรอนิกส์
ผู้ใช้ปลายทางสามารถส่งคืนเครื่องมือให้กับ Marxperts GmbH เพื่อนำไปกำจัดโดยไม่ต้องเสียค่าธรรมเนียมในการกำจัด
ข้อเสนอนี้ใช้ได้เฉพาะภายใต้เงื่อนไขต่อไปนี้:
- หน่วยดังกล่าวได้ถูกขายให้กับบริษัทหรือสถาบันในสหภาพยุโรปแล้ว
- ปัจจุบันหน่วยดังกล่าวเป็นของบริษัทหรือสถาบันในสหภาพยุโรป
- อุปกรณ์สมบูรณ์และไม่ปนเปื้อน
เครื่องดนตรีไม่มีแบตเตอรี่ หากไม่ส่งคืนให้กับผู้ผลิต ถือเป็นความรับผิดชอบของเจ้าของที่จะต้องปฏิบัติตามกฎท้องถิ่นในการกำจัดอุปกรณ์อิเล็กทรอนิกส์
การทำงาน
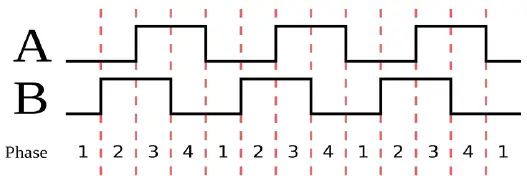
กล่อง marquadb คือไมโครคอนโทรลเลอร์ที่นับสัญญาณ (“A quad B”) จากตัวเข้ารหัสส่วนเพิ่ม ตัวเข้ารหัสส่วนเพิ่มคืออุปกรณ์ระบบเครื่องกลไฟฟ้าเชิงเส้นหรือแบบหมุนที่มีสัญญาณเอาท์พุต 2 สัญญาณคือ A และ B ซึ่งจะปล่อยพัลส์เมื่อมีการเคลื่อนย้ายอุปกรณ์ ตัวเข้ารหัสส่วนเพิ่มจะรายงานตำแหน่งที่เพิ่มขึ้นเกือบจะในทันที ซึ่งช่วยให้สามารถตรวจสอบการเคลื่อนไหวของกลไกความเร็วสูงได้ในเวลาใกล้เคียงเรียลไทม์ แม้ว่าสัญญาณ A และ B จะแสดงความคืบหน้าของการเคลื่อนไหว แต่การเปลี่ยนเฟสระหว่าง A และ B ช่วยให้สามารถกำหนดทิศทางของการเคลื่อนไหวได้ ในรูปด้านบน สัญญาณ B นำหน้า A ดังนั้นทิศทางการเคลื่อนที่จึงเป็นลบ
กล่อง marquadb นับพัลส์จากแหล่งต่างๆ ได้ถึง 3 แห่งโดยแยกจากกัน แต่ไม่พร้อมกัน การนับทำงานในทิศทางใดทิศทางหนึ่ง เครื่องมือจะรายงานทิศทางการเคลื่อนไหวและเวลาที่ผ่านไปเพื่อนับพัลส์ซึ่งสามารถหาความเร็วของการเคลื่อนไหวได้ อย่างไรก็ตาม ฟังก์ชันที่แท้จริงของกล่อง mar quadb คือการกระตุ้นการทำงานหลังจากถึงจำนวนพัลส์ที่กำหนด กล่องจะป้อนสัญญาณ (เช่น TTL) เข้าไปในเอาต์พุตโคแอกเซียลตัวใดตัวหนึ่ง ระดับของเอาต์พุตโคแอกเชียลจะเป็นสูงหรือต่ำและเป็นดังนี้:
- ต่ำหากกล่องไม่นับ
- สูงหากกล่องกำลังนับ
- เปลี่ยนเป็น LOW หากนับจำนวนพัลส์แล้ว
- เปลี่ยนกลับเป็นสูงทันทีหรือหลังจากการหน่วงเวลาที่กำหนดได้
- ต่ำหากกล่องหยุดนับ
ตามค่าเริ่มต้น LOW หมายถึง 0.0 โวลต์ และ HIGH หมายถึง 3.3 โวลต์ สามารถกลับระดับได้หากต้องการ กล่อง marquadb ไม่ใช่เครื่องมือแบบเรียลไทม์ เวลาในการสลับระหว่าง LOW และ HIGH อยู่ในลำดับความสำคัญ 5 ไมโครวินาที แต่สามารถเพิ่มระยะเวลาของสัญญาณเอาท์พุตได้
การใช้งานโดยทั่วไปของเครื่องมือคือการส่งสัญญาณทริกเกอร์ไปยังฮาร์ดแวร์ทุกประเภทในขณะที่มอเตอร์ที่เชื่อมต่อกับตัวเข้ารหัสกำลังเคลื่อนที่ สัญญาณทริกเกอร์จะถูกสร้างขึ้นหลังจากการนับจำนวนพัลส์ที่กำหนด เครื่องมือนี้ไม่จำเป็นต้องทราบคุณสมบัติทางกายภาพของมอเตอร์ เพียงนับพัลส์ A และ B ของตัวเข้ารหัสส่วนเพิ่ม
Exampเลอ: มอเตอร์ที่ให้พัลส์ตัวเข้ารหัส 1000 พัลส์ต่อการเคลื่อนไหว 1 มม. ควรกระตุ้นให้กล้องถ่ายภาพหลังจากการเคลื่อนไหวทุก ๆ XNUMX มม. ต้องใช้กล้องที่สามารถรับสัญญาณทริกเกอร์ประเภท TTL ได้
ส่วนประกอบฮาร์ดแวร์
อุปกรณ์มาพร้อมกับส่วนประกอบต่อไปนี้:
ข้อมูลอินพุต
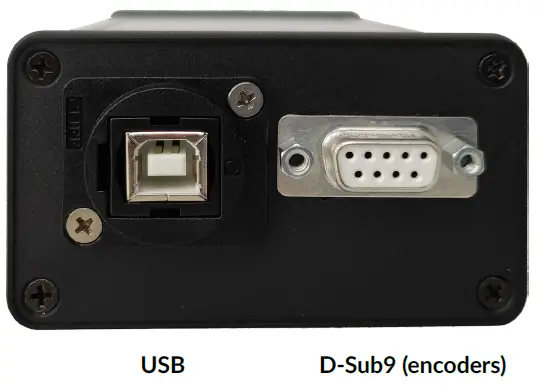
กล่อง marquadb มีขั้วต่อ USB-B ที่ด้านหลังและขั้วต่อ D-Sub9 กล่องจะต้องเชื่อมต่อกับพีซีโดยใช้สาย USB
เส้น A, B และกราวด์จากตัวเข้ารหัสแบบเพิ่มสูงสุด 3 ตัวจะถูกป้อนเข้าสู่คอนโทรลเลอร์ผ่านขั้วต่อ 9 พิน
การกำหนดพินแสดงอยู่ในตารางด้านล่าง
| เข็มหมุด | งานที่มอบหมาย | |
| 1 | ตัวเข้ารหัส 1: สัญญาณ A | 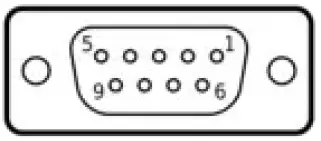
|
| 2 | ตัวเข้ารหัส 1: สัญญาณ B | |
| 3 | ตัวเข้ารหัส 1: GND | |
| 4 | ตัวเข้ารหัส 2: สัญญาณ A | |
| 5 | ตัวเข้ารหัส 2: สัญญาณ B | |
| 6 | ตัวเข้ารหัส 2: GND | |
| 7 | ตัวเข้ารหัส 3: สัญญาณ A | |
| 8 | ตัวเข้ารหัส 3: สัญญาณ B | |
| 9 | ตัวเข้ารหัส 3: GND |
เอาท์พุต
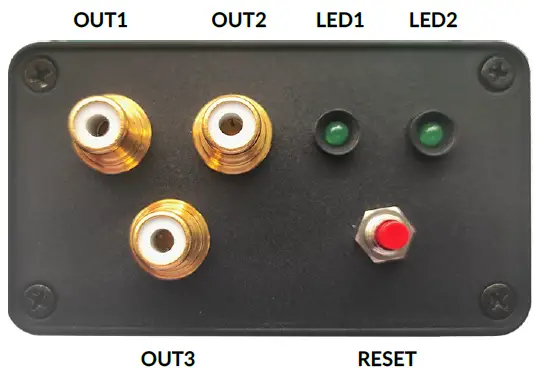
สัญญาณเอาท์พุตจะจ่ายให้กับขั้วต่อโคแอกเซียลที่ต้องเชื่อมต่อกล่อง (ขั้วต่อสีทองเหลือง) กับอุปกรณ์เป้าหมาย เช่น กล้อง เมื่อตัวควบคุมไม่ได้ใช้งาน เอาต์พุตบนเอาต์พุตโคแอกเซียลจะต่ำ (0.0 โวลต์) เมื่อตัวควบคุมเริ่มนับ สัญญาณเอาต์พุตจะถูกตั้งค่าเป็นสูง (3.3 โวลต์) หลังจากถึงจำนวนนับที่กำหนด สัญญาณเอาต์พุตจะลดลงไปที่ LOW สัญญาณนี้สามารถใช้เพื่อกระตุ้นการอ่านค่าของกล้องหรือการดำเนินการบางอย่างในฮาร์ดแวร์ประเภทอื่น การดำเนินการนี้จะถูกทำซ้ำตามจำนวนครั้งที่กำหนด
ระยะเวลาของการสลับสัญญาณ HIGH-LOW-HIGH อยู่ที่ประมาณ 5 ไมโครวินาที สามารถกลับสัญญาณได้ (HIGH=0 V, LOW=3.3 V)
เมื่อตัวควบคุมนับสัญญาณ LED1 จะติดสว่าง มิฉะนั้น เมื่อตัวควบคุมไม่ได้ใช้งาน LED1 จะปิด LED2 จะทำงานในลักษณะเดียวกันแต่จะเปิดเฉพาะในกรณีที่สัญญาณเอาท์พุตอยู่ในระดับสูงและไม่เช่นนั้นจะถูกปิด เนื่องจากเวลาในการสลับระหว่างสูงและต่ำนั้นสั้นมาก ไฟ LED ทั้งสองดวงจึงมักจะมีลักษณะเหมือนกัน
เวลาหน่วงที่สามารถตั้งค่าได้จะต้องมีอย่างน้อย 100 มิลลิวินาทีจึงจะเห็นความแตกต่าง
ปุ่ม RESET จะรีบูทคอนโทรลเลอร์ซึ่งเป็นทางเลือกแทนการถอดสาย USB เมื่อบูตเครื่อง LED1 จะกะพริบ 5 ครั้งในขณะที่ LED2 สว่างตลอดเวลา หลังจากลำดับการเริ่มต้น ไฟ LED ทั้งสองดวงจะถูกปิด
การสื่อสาร
ตัวควบคุม marquadb จะต้องได้รับการควบคุมจากพีซีที่รวบรวมข้อมูลผ่านการเชื่อมต่อ USB (USB-B ถึง USB-A) คอนโทรลเลอร์มีอินเทอร์เฟซแบบอนุกรมทั่วไปที่เข้าใจคำสั่ง ASCII ธรรมดา และส่งเอาต์พุตไปยังอินเทอร์เฟซแบบอนุกรมในรูปแบบสตริงข้อความธรรมดา
ดังนั้นจึงเป็นไปได้ที่จะใช้งานกล่อง "ด้วยตนเอง" หรือผ่านทาง API คุณสามารถใช้โปรแกรมต่างๆ มากมายที่ใช้การเชื่อมต่อแบบอนุกรม เช่น PuTTY บน Windows หรือ minicom บน Linux กรุณาใช้การตั้งค่าการเชื่อมต่อแบบอนุกรมต่อไปนี้:
- บอดเรต: 115200
- ความเท่าเทียมกัน: ไม่มี
- จุดแวะพัก: 1
- ขนาดไบต์: 8 บิต
- การควบคุมการไหล: ไม่มี
บน Linux คุณสามารถใช้คำสั่งง่ายๆ ดังต่อไปนี้ เพื่อให้แน่ใจว่าอุปกรณ์นั้น file มีสิทธิ์ที่เหมาะสมสำหรับผู้ใช้ในการอ่านและเขียน:
- มินิคอม -D /dev/ttyACM0 -b 115200
บน Linux OS /dev/ttyACM0 จะเป็นชื่ออุปกรณ์ทั่วไป บน Windows จะเป็น COMn โดยที่ n เป็นตัวเลขหลักเดียว
บันทึก: เมื่อใช้ API การสื่อสารโดยใช้คำสั่งด้านล่าง อย่าลืมอ่านสตริงข้อความที่สร้างโดยตัวควบคุมด้วย แม้ว่าคุณจะไม่ได้ใช้งานก็ตาม
คำสั่ง
คอนโทรลเลอร์เข้าใจคำสั่งต่อไปนี้ (สตริงในวงเล็บเป็นทางเลือก
- นับ N เส้น L ช่อง C – เข้าสู่โหมดการนับสำหรับการนับ N ด้วยเส้นตัวเข้ารหัส L (พัลส์) แต่ละเส้นบนช่อง C (ค่าเริ่มต้น: N=0, L=1000, C=1)
- NL [C] – ตามที่กล่าวข้างต้น แต่ไม่มีคีย์เวิร์ด “นับ” และ “บรรทัด” และมีตัวเลือกในการจัดหาช่องสัญญาณ 1 ถึง 3
- init [T [L]] – เริ่มต้นด้วยเส้น T เป็นค่าเผื่อและเส้น L เพื่อเริ่มต้น (ค่าเริ่มต้น: T=1, L=1000)
- chan[nel] C – นับสัญญาณจากช่อง C (1 ถึง 3, ค่าเริ่มต้น: 3)
- ช่วยเหลือ – แสดงการใช้งาน
- set – แสดงค่าปัจจุบันของพารามิเตอร์ที่สามารถตั้งค่าได้
- show – แสดงความคืบหน้าของการนับต่อเนื่องรวมถึงเวลาที่ผ่านไป
- สูง - ตั้งค่าระดับสัญญาณเริ่มต้นเป็น HIGH (3.3 V)
- ต่ำ – ตั้งค่าระดับสัญญาณเริ่มต้นเป็นต่ำ (0 V)
- led1|2 เปิด|ปิด – เปิดหรือปิด LED1|2
- out1|2|3 on|off – เปิด OUT1|2|3 (สูง) หรือปิด (ต่ำ)
- tol[erance] T – ความทนทานต่อสัญญาณที่นับเพื่อบรรลุเป้าหมาย (ค่าเริ่มต้น: T=1)
- usec U – เวลาเป็นไมโครวินาทีเพื่อเปลี่ยนระดับเอาต์พุตจาก LOW เป็น HIGH หลังจากการนับเหตุการณ์ (ค่าเริ่มต้น: U = 0)
- สิ้นสุด | ยกเลิก | หยุด – สิ้นสุดการนับต่อเนื่องก่อนที่จะถึงเป้าหมาย
- verbose [false|true] – สลับการใช้คำฟุ่มเฟือย ใช้อาร์กิวเมนต์ True จาก False
หากต้องการเริ่มนับเหตุการณ์ N เพียงป้อน N ก็เพียงพอแล้ว หลังจากออกคำสั่งแล้ว การนับจะเริ่มต้นและสัญญาณเอาท์พุตจะถูกตั้งค่าเป็น HIGH (3.3 V) พารามิเตอร์ L คือจำนวนบรรทัด (พัลส์) ที่จะนับก่อนที่จะสร้างสัญญาณทริกเกอร์บนเอาต์พุตที่สอดคล้องกัน OUT1, OUT2 หรือ OUT3 กระบวนการนี้ทำซ้ำเป็นเวลา N รอบ
ระยะเวลาของสัญญาณเอาท์พุต เช่น สวิตช์สูง-ต่ำ-สูงควบคุมโดยความเร็ว CPU ของคอนโทรลเลอร์และมีค่าประมาณ 5 ไมโครวินาที ระยะเวลาสามารถเปลี่ยนแปลงได้โดยใช้คำสั่ง `usec U" โดยที่ U คือระยะเวลาของสัญญาณในหน่วยไมโครวินาทีและมีค่าเริ่มต้นเป็น 0 หากการนับ N ทั้งหมดเสร็จสมบูรณ์ เอาต์พุตจะถูกตั้งค่าเป็น LOW และตัวควบคุมจะกลับสู่สถานะไม่ได้ใช้งาน
ขณะนับ LED1 และ LED2 จะเปิดขึ้น หากโหมดการนับทำงานอยู่ คำสั่งเพิ่มเติมทั้งหมดในการนับบรรทัดจะถูกละเว้น ไม่สามารถนับบรรทัดพร้อมกันมากกว่า 1 ช่องได้
Exampเลอ:
หากต้องการนับ 4 คูณ 250 บรรทัดในช่อง 3 ให้ออกคำสั่ง "4 250 3" คุณจะได้รับคำติชมคล้ายกับ:
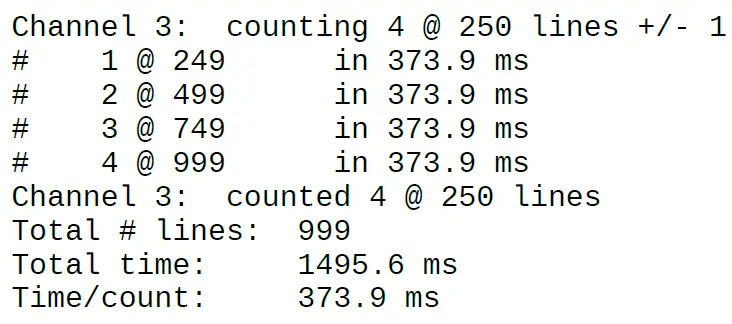
ดังที่เห็น เครื่องมือจะส่งกลับเวลาที่ผ่านไปและจำนวนรวมทั้งหมด ของเส้นที่นับ จำนวนเส้นทั้งหมดจะเป็นค่าบวกหรือลบซึ่งระบุทิศทางการเคลื่อนที่ อย่างไรก็ตาม จำนวนพัลส์ที่จะนับจะถูกกำหนดให้เป็นจำนวนบวกเสมอ โดยไม่คำนึงถึงทิศทางการเคลื่อนที่ที่แท้จริง
ติดต่อ
หากคุณมีคำถามเกี่ยวกับระบบหรือการใช้งาน โปรดติดต่อเราทางโทรศัพท์หรืออีเมล
มาร์เอ็กซ์เพิร์ทส์ GmbH
- การทำงาน 3 22844 นอร์เดอร์สเตดท์ / เยอรมนี
- โทรศัพท์: +49 (40) 529 884 – 0
- โทรสาร: +49 (40) 529 884 – 20
- info@marxperts.com
- www.marxperts.com
ลิขสิทธิ์ 2024 marXperts GmbH
สงวนลิขสิทธิ์.
เอกสาร / แหล่งข้อมูล
 |
marXperts Quadrature Decoder สำหรับตัวเข้ารหัสแบบเพิ่มหน่วย [พีดีเอฟ] คู่มือการใช้งาน v1.1, ตัวถอดรหัสการสร้างพื้นที่สี่เหลี่ยมจัตุรัสสำหรับตัวเข้ารหัสส่วนเพิ่ม, การสร้างพื้นที่สี่เหลี่ยมจัตุรัส, ตัวถอดรหัสสำหรับตัวเข้ารหัสส่วนเพิ่ม, ตัวเข้ารหัสส่วนเพิ่ม, ตัวเข้ารหัส |