증분 인코더용 marXperts 구적 디코더

제품 정보
명세서
- 제품 이름: 마르콰드
- 버전: v1.1
- 유형: 증분 인코더용 직교 디코더
- 제조업체: marXperts GmbH
제품 정보
marquadb는 증분 인코더용으로 설계된 직교 디코더입니다. 이는 marquadb 컨트롤러 박스를 포함한 하드웨어 구성 요소를 갖추고 있습니다. 이 장치를 사용하면 USB-B 커넥터와 D-Sub3 커넥터를 통해 최대 9개의 증분 인코더를 연결할 수 있습니다.
기본 볼륨tag설정은 0.0V에서 LOW, 3.3V에서 HIGH이며 필요한 경우 레벨을 반전할 수 있는 옵션이 있습니다. 이 장치는 실시간이 아니며 LOW와 HIGH 사이의 전환 시간이 약 5마이크로초이므로 더 긴 출력 신호 지속 시간을 위해 조정될 수 있습니다.
자주 묻는 질문
- Q: 볼륨tagmarquadb에서 레벨이 반전되나요?
- A: 네, vol을 되돌리는 것이 가능합니다tag원하는 경우 marquadb의 레벨을 조정하세요.
- Q: marquadb에 몇 개의 증분 인코더를 연결할 수 있습니까?
- A: marquadb는 D-Sub3 커넥터를 통해 최대 9개의 증분 인코더를 연결할 수 있습니다.
이 매뉴얼을 사용하는 방법
marquadb 상자 작동을 시작하기 전에 설명서 패키지에 포함된 사용자 설명서와 기술 문서를 주의 깊게 읽으십시오.
선언
유럽![]()
이 장비는 EMC 지침 2014/30/EU, Low Vol 규정을 준수합니다.tage 지침 2014/35/EU 및 RoHS 지침 3032/2012.
규정 준수는 유럽 공동체 공식 저널에 나열된 다음 사양을 준수함으로써 입증되었습니다.
- EN61326-1: 2018(전기 안전)
- EN301 489-17: V3.1.1: 2017(무선 장비 및 서비스용 EMC)
- EN301 48901 V2.2.3: 2019(무선 장비 및 서비스용 EMC)
- EN300 328 V2.2.2: 2019(2.4GHz 대역의 광대역 전송 시스템)
- EN6300: 2018(RoHS)
북아메리카![]()
이 장비는 FCC 규정 15부에 따라 클래스 B 디지털 장치의 사양을 준수하는 것으로 확인되었으며 디지털 장치에 대한 캐나다 간섭 유발 장비 표준 ICES-003의 모든 요구 사항을 충족합니다.
전기 및 전자 폐기물 처리 지침
최종 사용자는 폐기 비용을 청구하지 않고 장비를 Marxperts GmbH에 반환하여 폐기할 수 있습니다.
이 제안은 다음 조건에서만 유효합니다.
- 장치가 EU 내의 회사 또는 기관에 판매되었습니다.
- 해당 장치는 현재 EU 내의 회사 또는 기관이 소유하고 있습니다.
- 장치가 완전하고 오염되지 않았습니다.
악기에는 배터리가 포함되어 있지 않습니다. 제조업체에 반환되지 않은 경우 전자 장비 폐기에 대한 현지 규정을 따르는 것은 소유자의 책임입니다.
기능
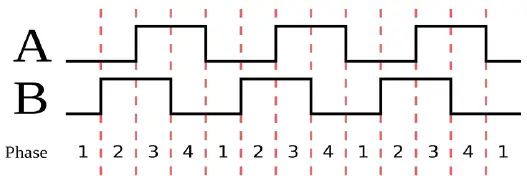
marquadb 상자는 증분형 인코더의 신호("A 쿼드 B")를 계산하는 마이크로컨트롤러입니다. 증분 인코더는 장치가 움직일 때 펄스를 발생시키는 2개의 출력 신호(A 및 B)가 있는 선형 또는 회전식 전기 기계 장치입니다. 증분 인코더는 위치 증분을 거의 즉각적으로 보고하므로 거의 실시간으로 고속 메커니즘의 움직임을 모니터링할 수 있습니다. A와 B 신호 중 하나가 움직임의 진행 상황을 표시하는 동안 A와 B 사이의 위상 변화를 통해 움직임의 방향을 결정할 수 있습니다. 위 그림에서 신호 B는 A를 앞서고 있으므로 이동 방향은 음수입니다.
marquadb 상자는 최대 3개 소스의 펄스를 독립적으로 계산하지만 동시에 계산하지는 않습니다. 계산은 어느 방향으로든 작동합니다. 기기는 이동 방향과 이동 속도를 파생할 수 있는 펄스를 계산하는 데 경과된 시간을 보고합니다. 그러나 mar 쿼드b 상자의 실제 기능은 주어진 펄스 수에 도달한 후 작업을 트리거하는 것입니다. 박스는 동축 출력 중 하나에 신호(TTL과 같은)를 공급합니다. 동축 출력 레벨은 HIGH 또는 LOW이며 다음과 같습니다.
- 상자가 계산되지 않는 경우 LOW
- 상자가 계산 중이면 HIGH
- 펄스 수가 계산되면 LOW로 전환합니다.
- 즉시 또는 구성 가능한 지연 후에 다시 HIGH로 전환
- 상자 계산이 중지되면 LOW
기본적으로 LOW는 0.0V를 의미하고 HIGH는 3.3V를 의미합니다. 원하는 경우 레벨을 반전시킬 수 있습니다. marquadb 상자는 실시간 장비가 아닙니다. LOW와 HIGH 사이를 전환하는 시간은 약 5마이크로초이지만 출력 신호의 지속 시간을 늘릴 수 있습니다.
장비의 일반적인 용도는 인코더에 연결된 모터가 움직일 때 모든 종류의 하드웨어에 트리거 신호를 제공하는 것입니다. 트리거 신호는 주어진 펄스 수를 카운트한 후 생성됩니다. 장비는 모터의 물리적 특성을 알 필요가 없습니다. 인크리멘탈 엔코더의 A, B 펄스만 카운트합니다.
Examp르 : 1000mm의 움직임당 1개의 인코더 펄스를 제공하는 모터는 XNUMXmm의 움직임이 있을 때마다 사진을 촬영하는 카메라를 작동시켜야 합니다. 이를 위해서는 TTL 유형의 트리거 신호를 수신할 수 있는 카메라가 필요합니다.
하드웨어 구성 요소
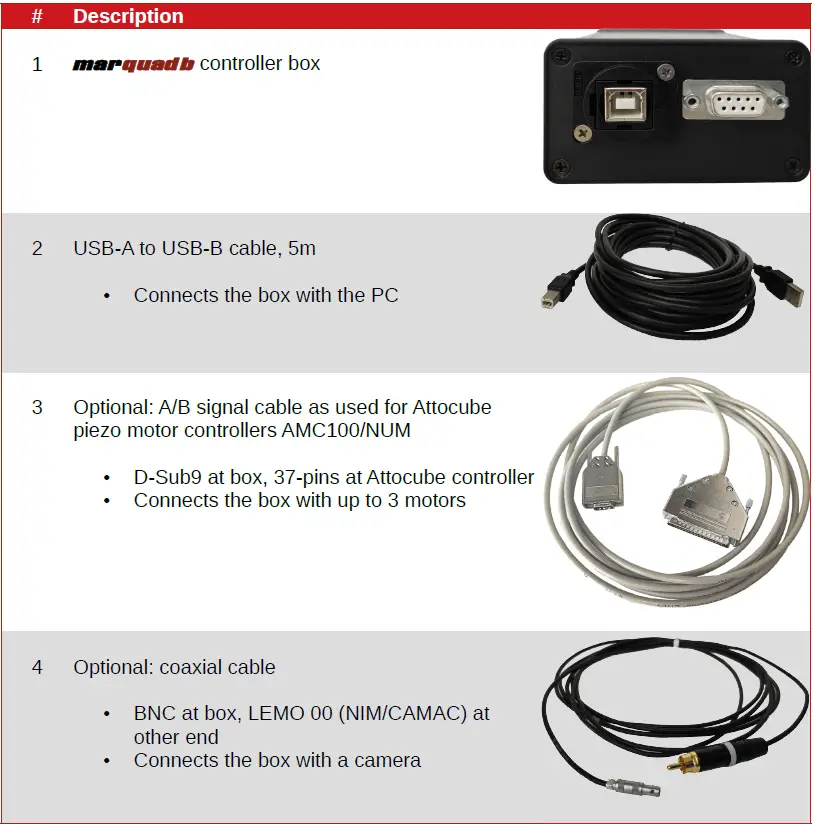
장치에는 다음 구성 요소가 함께 제공됩니다.
입력
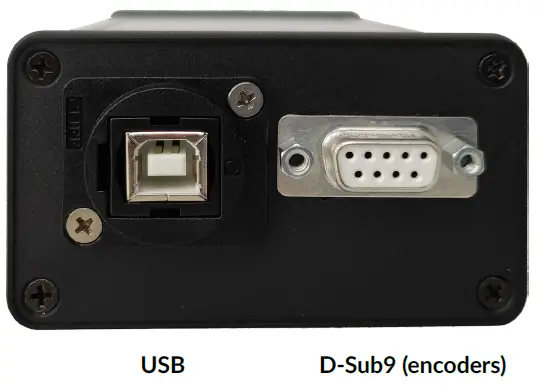
marquadb 상자에는 뒷면에 USB-B 커넥터와 D-Sub9 커넥터가 있습니다. 상자는 USB 케이블을 사용하여 PC에 연결되어야 합니다.
최대 3개의 증분 인코더의 A, B 및 접지선은 9핀 커넥터를 통해 컨트롤러에 공급됩니다.
핀 할당은 아래 표에 나와 있습니다.
| 핀 | 과제 | |
| 1 | 인코더 1: 신호 A | 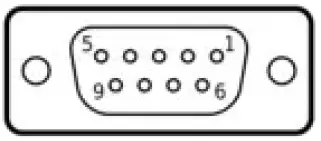
|
| 2 | 인코더 1: 신호 B | |
| 3 | 인코더 1: GND | |
| 4 | 인코더 2: 신호 A | |
| 5 | 인코더 2: 신호 B | |
| 6 | 인코더 2: GND | |
| 7 | 인코더 3: 신호 A | |
| 8 | 인코더 3: 신호 B | |
| 9 | 인코더 3: GND |
출력
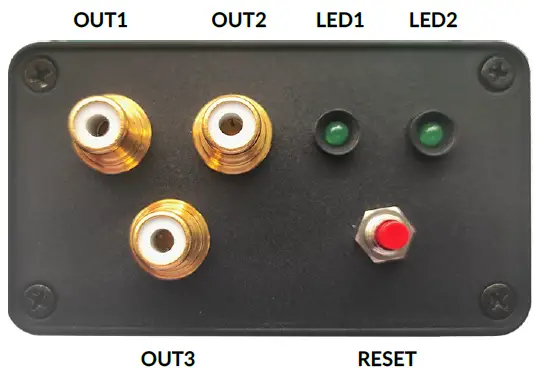
출력 신호는 상자(황동색 커넥터)를 대상 장치(예: 카메라)와 연결해야 하는 동축 커넥터에 공급됩니다. 컨트롤러가 유휴 상태일 때 동축 출력의 출력은 LOW(0.0V)입니다. 컨트롤러가 카운트를 시작하면 출력 신호가 HIGH(3.3V)로 설정됩니다. 주어진 카운트 수에 도달한 후 출력 신호는 LOW로 떨어집니다. 이 신호는 카메라 판독이나 다른 유형의 하드웨어에서 일부 작업을 트리거하는 데 사용될 수 있습니다. 이 작업은 지정된 횟수만큼 반복됩니다.
신호가 HIGH-LOW-HIGH로 전환되는 기간은 약 5시간입니다. 0마이크로초. 신호를 반전시킬 수 있습니다(HIGH=3.3V, LOW=XNUMXV).
컨트롤러가 신호를 계산하는 동안 LED1이 켜집니다. 그렇지 않으면 컨트롤러가 유휴 상태일 때 LED1이 꺼집니다. LED2도 유사하게 작동하지만 출력 신호가 HIGH인 경우에만 켜지고 그렇지 않으면 꺼집니다. HIGH와 LOW 사이의 전환 시간이 매우 짧기 때문에 두 LED는 일반적으로 동일하게 보입니다.
차이를 확인하려면 설정 가능한 지연 시간이 100밀리초 이상이어야 합니다.
RESET 버튼은 USB 케이블을 뽑는 대신 컨트롤러를 재부팅합니다. 부팅 시 LED1이 5번 깜박이고 LED2는 계속 켜져 있습니다. 초기화 순서가 끝나면 두 LED가 모두 꺼집니다.
의사소통
marquadb 컨트롤러는 USB 연결(USB-B에서 USB-A로)을 통해 데이터 수집 PC에서 제어되어야 합니다. 컨트롤러는 일반 ASCII 명령을 이해하고 출력을 일반 텍스트 문자열로 직렬 인터페이스에 보내는 기존 직렬 인터페이스를 제공합니다.
따라서 "수동으로" 또는 API를 통해 상자를 작동하는 것이 가능합니다. Windows에서는 PuTTY, Linux에서는 minicom과 같이 직렬 연결을 사용하는 다양한 프로그램을 사용할 수 있습니다. 다음 직렬 연결 설정을 사용하십시오.
- 전송 속도: 115200
- 패리티: 없음
- 정지 비트: 1
- 바이트 크기: 8비트
- 흐름 제어: 없음
Linux에서는 다음과 같은 간단한 명령을 사용하여 장치가 file 사용자가 읽고 쓸 수 있는 적절한 권한이 있습니다.
- minicom -D /dev/ttyACM0 -b 115200
Linux OS에서는 /dev/ttyACM0이 일반적인 장치 이름입니다. Windows에서는 n이 한 자리 숫자인 COMn이 됩니다.
메모: 아래 명령을 사용하여 통신 API를 구현할 때 컨트롤러에서 생성된 텍스트 문자열을 사용하지 않더라도 읽어야 합니다.
명령
컨트롤러는 다음 명령을 이해합니다(괄호 안의 문자열은 선택 사항입니다.
- N 라인 L 채널 C 카운트 – 채널 C에서 각각 L 엔코더 라인(펄스)을 사용하여 N 카운트에 대한 카운팅 모드로 들어갑니다(기본값: N=0, L=1000, C=1)
- NL [C] – 위와 동일하지만 키워드 "counts" 및 "lines"가 없고 채널 1~3을 제공하는 옵션이 있음
- init [T [L]] – T 라인을 허용 오차로 초기화하고 L 라인을 시작하여 초기화합니다(기본값: T=1, L=1000)
- chan[nel] C – 채널 C의 신호 카운트(1 ~ 3, 기본값: 3)
- 도움말 – 사용법을 보여줍니다
- set - 설정 가능한 매개변수의 현재 값을 표시합니다.
- show – 경과 시간을 포함하여 진행 중인 계산 진행 상황을 표시합니다.
- high - 기본 신호 레벨을 HIGH(3.3V)로 설정합니다.
- low - 기본 신호 레벨을 LOW(0V)로 설정합니다.
- led1|2 켜기|끄기 – LED1|2 켜기 또는 끄기
- out1|2|3 켜기|끄기 – OUT1|2|3 켜기(HIGH) 또는 끄기(LOW)
- tol[erance] T – 목표 도달을 위해 계산된 신호에 대한 허용 오차(기본값: T=1)
- usec U – 카운트 이벤트 후 출력 레벨을 LOW에서 HIGH로 다시 전환하는 시간(마이크로초)(기본값: U = 0)
- 끝 | 중단 | 중지 – 목표에 도달하기 전에 진행 중인 계산을 종료합니다.
- verbose [false|true] – 자세한 내용을 토글합니다. True 또는 False 인수를 사용하세요.
N 이벤트 카운트를 시작하려면 N만 입력하면 됩니다. 명령을 실행하면 카운트가 시작되고 출력 신호가 HIGH(3.3V)로 설정됩니다. 매개변수 L은 해당 출력 OUT1, OUT2 또는 OUT3에서 트리거 신호를 생성하기 전에 카운트할 라인(펄스) 수입니다. 이 과정은 N주기 동안 반복됩니다.
출력 신호의 지속 시간, 즉 HIGH-LOW-HIGH 스위치는 컨트롤러의 CPU 속도에 따라 결정되며 약 5마이크로초입니다. 지속 시간은 "usec U" 명령을 사용하여 변경할 수 있습니다. 여기서 U는 마이크로초 단위의 신호 지속 시간이며 기본값은 0입니다. 모든 N 카운트가 완료되면 출력이 LOW로 설정되고 컨트롤러가 유휴 상태로 돌아갑니다.
카운트하는 동안 LED1과 LED2가 켜집니다. 계산 모드가 활성화된 경우 라인 수를 계산하는 모든 추가 명령은 무시됩니다. 1개 이상의 채널에서 동시에 라인 수를 계산하는 것은 불가능합니다.
Examp르 :
채널 4에서 250라인의 3배를 계산하려면 "4 250 3" 명령을 실행하십시오. 다음과 유사한 피드백을 받게 됩니다.
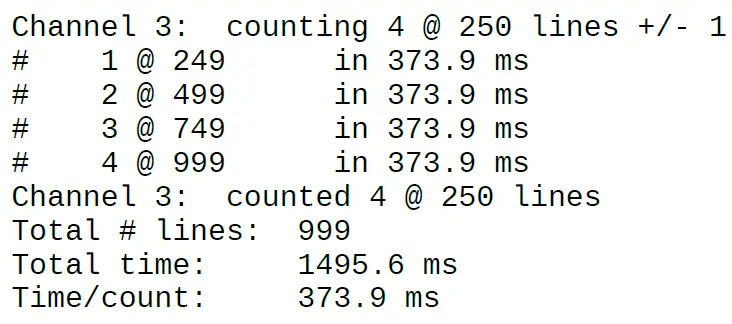
볼 수 있듯이 계측기는 경과 시간과 총 번호를 반환합니다. 계산된 줄의 수입니다. 총 라인 수는 이동 방향을 나타내는 양수 또는 음수입니다. 그러나 계산할 펄스 수는 실제 이동 방향에 관계없이 항상 양수로 제공됩니다.
연락하다
시스템이나 사용에 관한 질문이 있는 경우 전화나 이메일로 문의해 주십시오.
marXperts GmbH
- Werkstr. 3 22844 노르더슈테트 / 독일
- 전화: +49 (40) 529 884 – 0
- 팩스: +49 (40) 529 884 – 20
- info@marxperts.com
- www.marxperts.com
저작권 2024 marXperts GmbH
모든 권리는 보호됩니다.
문서 / 리소스
 |
증분 인코더용 marXperts 구적 디코더 [PDF 파일] 사용자 매뉴얼 v1.1, 증분 인코더용 직교 디코더, 증분 인코더용 직교, 증분 인코더용 디코더, 증분 인코더, 인코더 |