marXperts Quadrature Decoder untuk Inkremental Encoder

Informasi Produk
Spesifikasi
- Nama Produk: marquadb
- Versi: Bahasa Inggris v1.1
- Jenis: Decoder Quadrature untuk Encoder Inkremental
- Pabrikan: marXperts GmbH
Informasi Produk
Marquadb adalah decoder kuadratur yang dirancang untuk encoder inkremental. Ini menampilkan komponen perangkat keras termasuk kotak pengontrol marquadb. Perangkat ini memungkinkan koneksi hingga 3 encoder tambahan melalui konektor USB-B dan konektor D-Sub9.
Volume defaulttagPengaturannya adalah RENDAH pada 0.0 Volt dan TINGGI pada 3.3 Volt, dengan opsi untuk membalikkan level jika diperlukan. Perangkat ini tidak real-time dan memiliki waktu peralihan antara LOW dan HIGH sekitar 5 mikrodetik, yang dapat disesuaikan untuk durasi sinyal keluaran yang lebih lama.
Tanya Jawab Umum
- Q: Bisakah voltaglevelnya dibalik di marquadb?
- A: Ya, dimungkinkan untuk membalikkan voltage level pada marquadb jika diinginkan.
- Q: Berapa banyak encoder tambahan yang dapat dihubungkan ke marquadb?
- A: Marquadb dapat menghubungkan hingga 3 encoder tambahan melalui konektor D-Sub9.
Cara menggunakan manual ini
Sebelum Anda mulai mengoperasikan kotak marquadb harap membaca Panduan Pengguna dan Dokumentasi Teknis yang disertakan dalam paket dokumentasi dengan cermat.
Deklarasi
Eropa![]()
Instrumen ini mematuhi EMC Directives 2014/30/EU, Low Voltage Directive 2014/35/EU serta Directive RoHS 3032/2012.
Kepatuhan ditunjukkan dengan kesesuaian terhadap spesifikasi berikut yang tercantum dalam Jurnal Resmi Komunitas Eropa:
- EN61326-1: 2018 (Keselamatan Listrik)
- EN301 489-17: V3.1.1: 2017 (EMC untuk peralatan dan layanan radio)
- EN301 48901 V2.2.3: 2019 (EMC untuk peralatan dan layanan radio)
- EN300 328 V2.2.2: 2019 (Sistem transmisi pita lebar pada pita 2.4 GHz)
- EN6300: 2018 (RoHS)
Amerika Utara![]()
Instrumen ini terbukti memenuhi spesifikasi perangkat digital kelas B sesuai dengan Peraturan FCC Bagian 15 dan memenuhi semua persyaratan Standar Peralatan Penyebab Interferensi Kanada ICES-003 untuk perangkat digital.
Petunjuk Limbah Listrik dan Elektronik
Pengguna akhir dapat mengembalikan instrumen tersebut ke Marxperts GmbH untuk dibuang tanpa dikenakan biaya atas pembuangannya.
Penawaran ini hanya berlaku dengan ketentuan berikut:
- unit tersebut telah dijual ke perusahaan atau lembaga di UE
- unit tersebut saat ini dimiliki oleh perusahaan atau lembaga di UE
- unit lengkap dan tidak terkontaminasi
Instrumen tidak mengandung baterai. Jika tidak dikembalikan ke produsen, pemilik bertanggung jawab untuk mengikuti peraturan setempat dalam membuang peralatan elektronik.
Fungsi
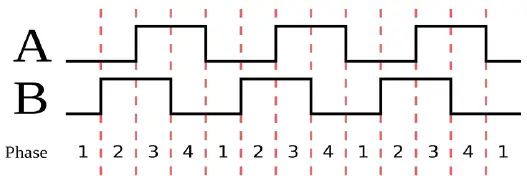
Kotak marquadb adalah mikrokontroler yang menghitung sinyal (“A quad B”) dari encoder tambahan. Encoder inkremental adalah perangkat elektromekanis linier atau putar yang memiliki 2 sinyal keluaran, A dan B, yang mengeluarkan pulsa saat perangkat dipindahkan. Encoder inkremental melaporkan peningkatan posisi hampir secara instan, sehingga memungkinkan mereka memantau pergerakan mekanisme berkecepatan tinggi hampir secara real-time. Meskipun sinyal A dan B akan menunjukkan kemajuan suatu pergerakan, pergeseran fase antara A dan B memungkinkan untuk menentukan arah pergerakan. Pada gambar di atas, sinyal B mengarah ke A, sehingga arah pergerakannya negatif.
Kotak marquadb menghitung pulsa dari hingga 3 sumber secara independen, tetapi tidak secara bersamaan. Penghitungannya bekerja di kedua arah. Instrumen akan melaporkan arah gerakan dan waktu yang telah berlalu untuk menghitung pulsa yang dapat digunakan untuk memperoleh kecepatan gerakan. Namun, fungsi sebenarnya dari kotak mar quadb adalah untuk memicu suatu tindakan setelah mencapai jumlah pulsa tertentu. Kotak tersebut memasukkan sinyal (seperti TTL) ke salah satu keluaran koaksial. Tingkat keluaran koaksial adalah TINGGI atau RENDAH dan adalah sebagai berikut:
- RENDAH jika kotak tidak dihitung
- TINGGI jika kotaknya dihitung
- beralih ke LOW jika jumlah pulsa sudah terhitung
- beralih kembali ke TINGGI segera atau setelah penundaan yang dapat dikonfigurasi
- RENDAH jika kotak berhenti menghitung
Secara default, LOW berarti 0.0 Volt dan HIGH berarti 3.3 Volt. Dimungkinkan untuk membalikkan level jika diinginkan. Kotak marquadb bukanlah instrumen real-time. Waktu untuk beralih antara RENDAH dan TINGGI berada pada urutan besarnya 5 mikrodetik tetapi durasi sinyal keluaran dapat ditingkatkan.
Kegunaan khas dari instrumen ini adalah untuk memberikan sinyal pemicu ke perangkat keras apa pun saat motor yang digabungkan ke encoder bergerak. Sinyal pemicu akan dibuat setelah menghitung sejumlah pulsa tertentu. Instrumen tidak perlu mengetahui sifat fisik motor. Itu hanya menghitung pulsa A dan B dari encoder tambahan.
Exampsaya: motor yang memberikan 1000 pulsa encoder per mm gerakan harus memicu kamera yang mengambil foto setelah setiap gerakan 1 mm. Hal ini memerlukan kamera yang mampu menerima sinyal pemicu tipe TTL.
Komponen perangkat keras
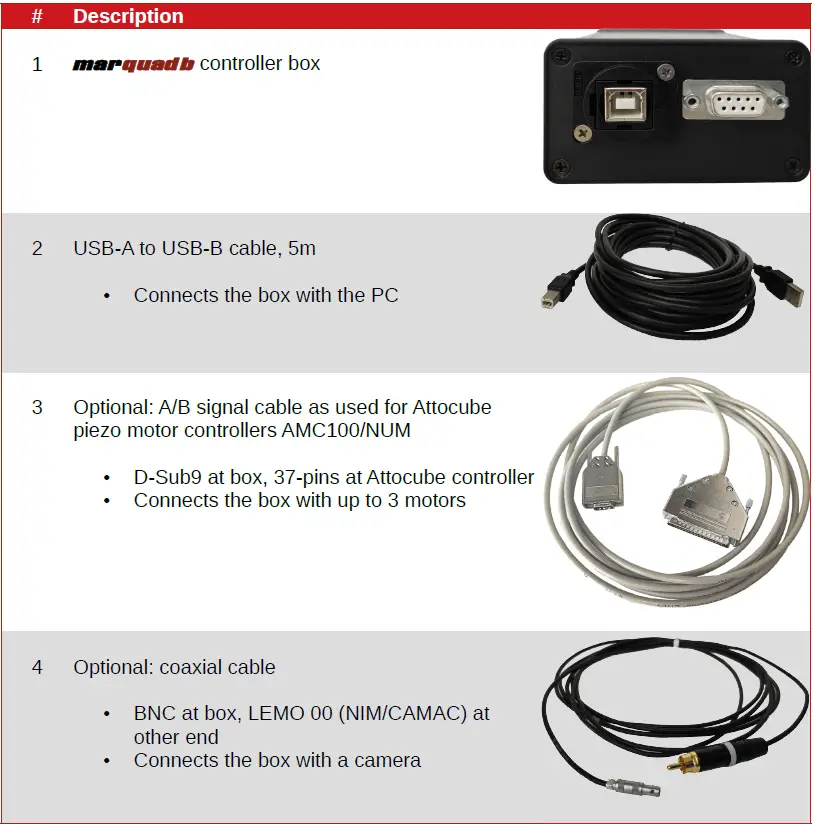
Perangkat dikirimkan dengan komponen berikut:
Masukan
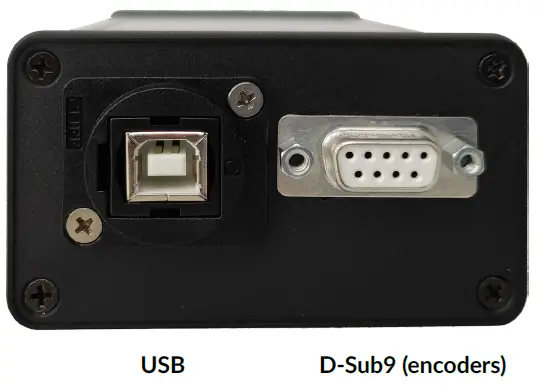
Kotak marquadb dilengkapi konektor USB-B di sisi belakang serta konektor D-Sub9. Kotak harus terhubung ke PC menggunakan kabel USB.
Jalur A, B, dan ground dari hingga 3 encoder tambahan dimasukkan ke pengontrol melalui konektor 9-pin.
Penetapan pin ditunjukkan pada tabel di bawah.
| Pin | Penugasan | |
| 1 | Encoder 1: sinyal A | 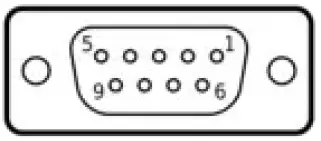
|
| 2 | Encoder 1: sinyal B | |
| 3 | Pembuat enkode 1: GND | |
| 4 | Encoder 2: sinyal A | |
| 5 | Encoder 2: sinyal B | |
| 6 | Pembuat enkode 2: GND | |
| 7 | Encoder 3: sinyal A | |
| 8 | Encoder 3: sinyal B | |
| 9 | Pembuat enkode 3: GND |
Keluaran
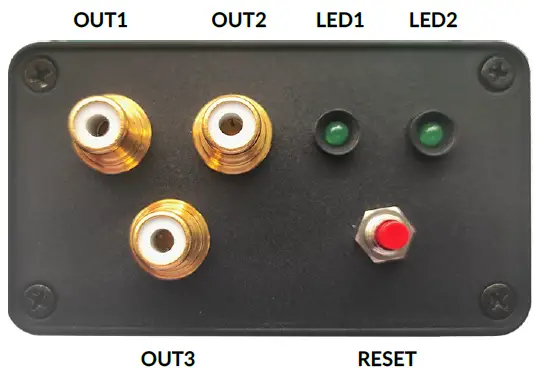
Sinyal keluaran disuplai ke konektor koaksial yang harus menghubungkan kotak (konektor berwarna kuningan) dengan perangkat target, misalnya kamera. Saat pengontrol dalam keadaan idle, keluaran pada keluaran koaksial adalah RENDAH (0.0 Volt). Ketika pengontrol mulai menghitung, sinyal keluaran diatur TINGGI (3.3 Volt). Setelah mencapai jumlah hitungan tertentu, sinyal keluaran turun ke RENDAH. Sinyal ini dapat digunakan untuk memicu pembacaan kamera atau beberapa tindakan di beberapa jenis perangkat keras lainnya. Operasi ini akan diulangi beberapa kali.
Durasi peralihan sinyal TINGGI-RENDAH-TINGGI adalah kira-kira. 5 mikrodetik. Dimungkinkan untuk membalikkan sinyal (HIGH=0 V, LOW=3.3 V).
Saat pengontrol menghitung sinyal, LED1 akan menyala. Jika tidak, saat pengontrol dalam keadaan idle, LED1 mati. LED2 akan beroperasi dengan cara yang sama tetapi hanya akan menyala jika sinyal outputnya TINGGI dan jika tidak maka akan dimatikan. Karena waktu peralihan antara HIGH dan LOW sangat singkat, kedua LED biasanya akan tampak sama.
Waktu tunda yang dapat diatur harus minimal 100 milidetik untuk melihat perbedaannya.
Tombol RESET akan melakukan reboot controller yang merupakan alternatif dari mencabut kabel USB. Saat booting, LED1 berkedip 5 kali sementara LED2 terus menyala. Setelah urutan inisialisasi, kedua LED akan dimatikan.
Komunikasi
Pengontrol marquadb harus dikontrol dari PC pengumpulan data melalui koneksi USB (USB-B ke USB-A). Pengontrol menyediakan antarmuka serial konvensional yang memahami perintah ASCII biasa dan mengirimkan output ke antarmuka serial sebagai string teks biasa.
Oleh karena itu, kotak ini dapat dioperasikan “secara manual” atau melalui API. Anda dapat menggunakan berbagai program yang menggunakan koneksi serial, misalnya PuTTY di Windows atau minicom di Linux. Silakan gunakan pengaturan koneksi serial berikut:
- baudrate: 115200
- paritas: Tidak ada
- stopbit: 1
- ukuran byte: 8 bit
- kontrol aliran: tidak ada
Di Linux, Anda dapat melakukan perintah sederhana seperti berikut, untuk memastikan bahwa perangkat file memiliki izin yang sesuai bagi pengguna untuk membaca dan menulis ke dalamnya:
- minicom -D /dev/ttyACM0 -b 115200
Di OS Linux, /dev/ttyACM0 akan menjadi nama perangkat yang umum. Di Windows, ini akan menjadi COMn di mana n adalah satu digit.
Catatan: saat mengimplementasikan API komunikasi menggunakan perintah di bawah ini, pastikan juga membaca string teks yang dihasilkan oleh pengontrol, meskipun Anda tidak menggunakannya.
Perintah
Pengontrol memahami perintah berikut (string dalam tanda kurung bersifat opsional.
- menghitung N jalur L saluran C – masuk ke mode penghitungan untuk N penghitungan dengan L jalur encoder (pulsa) masing-masing di saluran C (default: N=0, L=1000, C=1)
- NL [C] – seperti di atas tetapi tanpa kata kunci “hitungan” dan “garis” dan dengan opsi untuk memasok saluran 1 hingga 3
- init [T [L]] – inisialisasi dengan garis T sebagai toleransi dan garis L untuk memulai (default: T=1, L=1000)
- chan[nel] C – menghitung sinyal dari saluran C (1 hingga 3, default: 3)
- bantuan – menunjukkan penggunaan
- set – menunjukkan nilai saat ini dari parameter yang dapat diatur
- show – menunjukkan kemajuan penghitungan yang sedang berlangsung termasuk waktu yang telah berlalu
- tinggi – mengatur level sinyal default ke TINGGI (3.3 V)
- rendah – mengatur level sinyal default ke RENDAH (0 V)
- led1|2 hidup|mati – menghidupkan atau mematikan LED1|2
- out1|2|3 hidup|mati – menghidupkan OUT1|2|3 (TINGGI) atau mematikan (RENDAH)
- tol[erance] T – toleransi sinyal terhitung untuk mencapai target (default: T=1)
- usec U – waktu dalam mikrodetik untuk beralih kembali tingkat output dari LOW ke HIGH setelah peristiwa penghitungan (default: U = 0)
- akhir | batalkan | berhenti – mengakhiri penghitungan yang sedang berlangsung sebelum mencapai target
- verbose [salah|benar] – mengubah verbositas. Gunakan argumen Benar atau Salah
Untuk mulai menghitung N kejadian, cukup memasukkan N saja. Setelah mengeluarkan perintah, penghitungan dimulai dan sinyal keluaran diatur ke TINGGI (3.3 V). Parameter L adalah jumlah baris (pulsa) yang harus dihitung sebelum menghasilkan sinyal pemicu pada output yang sesuai OUT1, OUT2 atau OUT3. Proses ini diulangi selama N siklus.
Durasi sinyal keluaran, mis. saklar TINGGI-RENDAH-TINGGI, diatur oleh kecepatan CPU pengontrol dan sekitar 5 mikrodetik. Durasi dapat diubah menggunakan perintah "usec U" di mana U adalah durasi sinyal dalam mikrodetik dan defaultnya adalah 0. Jika semua N penghitungan selesai, output diatur ke LOW dan pengontrol kembali ke status idle.
Saat menghitung, LED1 dan LED2 menyala. Jika mode penghitungan aktif, semua perintah selanjutnya untuk menghitung garis akan diabaikan. Tidak mungkin menghitung saluran secara bersamaan di lebih dari 1 saluran.
Exampsaya:
Untuk menghitung 4 kali 250 baris pada saluran 3, berikan perintah „4 250 3“. Anda akan mendapatkan umpan balik yang serupa dengan:
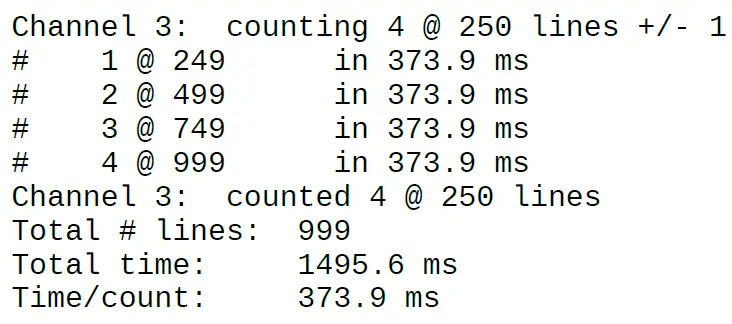
Seperti yang dapat dilihat, instrumen mengembalikan waktu yang telah berlalu dan jumlah total. dari garis yang dihitung. Jumlah total garis akan positif atau negatif, yang menunjukkan arah pergerakan. Namun, jumlah pulsa yang akan dihitung akan selalu diberikan sebagai angka positif, terlepas dari arah pergerakan sebenarnya.
Kontak
Jika Anda memiliki pertanyaan mengenai sistem atau penggunaannya, silakan hubungi kami melalui telepon atau email.
marXperts GmbH
- Werkstr. 3 22844 Norderstedt / Jerman
- Telp.: +49 (40) 529 884 – 0
- Fax: +49 (40) 529 884 – 20
- info@marxperts.com
- www.marxperts.com
Hak Cipta 2024 marXperts GmbH
Hak cipta dilindungi undang-undang.
Dokumen / Sumber Daya
 |
marXperts Quadrature Decoder untuk Inkremental Encoder [Bahasa Indonesia:] Panduan Pengguna v1.1, Dekoder Kuadrat untuk Enkoder Tambahan, Kuadratur, Dekoder untuk Enkoder Tambahan, Enkoder Tambahan, Enkoder |