![]() leven.augmented
leven.augmented
UM2154
Gebruiksaanwijzing
STEVE-SPIN3201: geavanceerde BLDC-controller met ingebed STM32 MCU-evaluatiebord
Invoering
Het STEVAL-SPIN3201-bord is een driefasig borstelloos DC-motorstuurbord gebaseerd op de STSPIN3F32, een driefasige controller met een geïntegreerde STM0 MCU, en implementeert drie-shuntweerstanden als topologie voor het lezen van de stroom.
Het biedt een eenvoudig te gebruiken oplossing voor de evaluatie van het apparaat in verschillende toepassingen, zoals huishoudelijke apparaten, ventilatoren, drones en elektrisch gereedschap.
Het bord is ontworpen voor het sensor- of sensorloze veldgeoriënteerde besturingsalgoritme met 3-shuntdetectie.
Figuur 1. STEVE-SPIN3201 evaluatiebord

Hardware- en softwarevereisten
Voor het gebruik van het STEVAL-SPIN3201 evaluatiebord zijn de volgende software en hardware vereist:
- Een Windows®-pc (XP, Vista 7, Windows 8, Windows 10) om het softwarepakket te installeren
- Een mini-B USB-kabel om het STEVAL-SPIN3201-bord op de pc aan te sluiten
- De STM32 Motor Control Software Development Kit Rev Y (X-CUBE-MCSDK-Y)
- Een 3-fase borstelloze gelijkstroommotor met een compatibel voltage en huidige beoordelingen
- Een externe gelijkstroomvoeding.
Aan de slag
De maximale beoordelingen van het bord zijn als volgt:
- Vermogen stage levering voltage (VS) van 8 V tot 45 V
- Motorfasestroom tot 15 Arms
Om uw project met het bord te starten:
Stap 1. Controleer de jumperpositie volgens de doelconfiguratie (zie Paragraaf 4.3 Overstroomdetectie
Stap 2. Sluit de motor aan op connector J3 en let daarbij op de volgorde van de motorfasen.
Stap 3. Voed de printplaat via ingang 1 en 2 van connector J2. De DL1 (rode) LED gaat branden.
Stap 4. Ontwikkel uw applicatie met behulp van de STM32 Motor Control Software Development Kit Rev Y (X-CUBEMCSDK-Y).
Hardwarebeschrijving en configuratie
Figuur 2. De posities van de hoofdcomponenten en connectoren tonen de positie van de hoofdcomponenten en connectoren op het bord.
Figuur 2. Hoofdcomponenten en connectorposities

Tabel 1. Jumpers voor hardware-instellingen bieden de gedetailleerde pin-out van de connectoren.
Tabel 1. Jumpers voor hardware-instellingen
| Trui | Toegestane configuraties | Standaardvoorwaarde: |
| JP1 | Selectie van VREG aangesloten op V-motor | OPEN |
| JP2 | Selectie motorvoeding aangesloten op DC-voeding | GESLOTEN |
| JP3 | Selectie Hall-encodervoeding naar USB (1) / VDD (3) voeding | 1 – 2 GESLOTEN |
| JP4 | Selectie reset van ST-LINK (U4) | OPEN |
| JP5 | Selectie PA2 aangesloten op Hal 3 | GESLOTEN |
| JP6 | Selectie PA1 aangesloten op Hal 2 | GESLOTEN |
| JP7 | Selectie PA0 aangesloten op Hal 1 | GESLOTEN |
Tabel 2. Andere connectoren, jumper en beschrijving van testpunten
|
Naam |
Pin | Label |
Beschrijving |
| J1 | 1 – 2 | J1 | Motorvoeding: |
| J2 | 1 – 2 | J2 | Hoofdvoeding apparaat (VM) |
| J3 | 1 – 2 – 3 | U, V, W | 3-fasige BLDC-motorfasenaansluiting |
| J4 | 1 – 2 – 3 | J4 | Connector voor Hall-/encodersensoren |
| 4 – 5 | J4 | Voeding Hall-sensoren/encoder | |
| J5 | – | J5 | USB-ingang ST-LINK |
| J6 | 1 | 3V3 | ST-LINK-voeding |
| 2 | KLIK | SWCLK van ST-LINK | |
| 3 | GND | GND | |
| 4 | DIO | SWDIO van ST-LINK | |
| J7 | 1 – 2 | J7 | WINKELWAGEN |
| J8 | 1 – 2 | J8 | ST-LINK-reset |
| TP1 | – | GREG | 12 V voltage regelaaruitgang |
| TP2 | – | GND | GND |
| TP3 | – | VDD | VDD |
| TP4 | – | SNELHEID | Snelheid potentiometer uitgang |
| TP5 | – | PA3 | PA3 GPIO (uitgang op-amp gevoel 1) |
| TP6 | – | VBUS | VBus-feedback |
| TP7 | – | OUT_U | Uitgang U |
| TP8 | – | PA4 | PA4 GPIO (uitgang op-amp gevoel 2) |
| TP9 | – | PA5 | PA5 GPIO (uitgang op-amp gevoel 3) |
| TP10 | – | GND | GND |
| TP11 | – | OUT_V | Uitgang V |
| TP12 | – | PA7 | PA7_3FG |
| TP13 | – | OUT_W | Uitgang W |
| TP14 | – | 3V3 | 3V3 ST-LINK |
| TP15 | – | 5V | USB-voltage |
| TP16 | – | IO | SWD_IO |
| TP17 | – | KLIK | SWD_CLK |
Schema beschrijving
De STEVAL-SPIN3201 biedt een complete FOC-oplossing met 3 shunts, bestaande uit een STSPIN32F0 – geavanceerde BLDC-controller met een ingebouwde STM32 MCU – en een drievoudige halfbrug-voedingseenheidtage met de NMOS STD140N6F7.
De STSPIN32F0 genereert autonoom al het benodigde leveringsvolumetages: de interne DC/DC-buck-converter levert 3V3 en een interne lineaire regelaar levert 12 V voor de gate-drivers.
De huidige feedbacksignaalconditionering wordt uitgevoerd via drie van de operationele amplifiers ingebed in het apparaat en een interne comparator zorgt voor overstroombeveiliging tegen shuntweerstanden.
Er zijn twee gebruikersknoppen, twee LED's en een trimmer beschikbaar om eenvoudige gebruikersinterfaces te implementeren (bijvoorbeeld het starten/stoppen van de motor en het instellen van de doelsnelheid).
Het STEVAL-SPIN3201-bord ondersteunt de kwadratuur-encoder en digitale Hall-sensoren als feedback over de motorpositie.
Het bord bevat een ST-LINK-V2 waarmee de gebruiker firmware kan debuggen en downloaden zonder extra hardwaretool.
4.1 Hall/encodermotorsnelheidssensor
Het evaluatiebord STEVAL-SPIN3201 ondersteunt de digitale Hall- en kwadratuur-encodersensoren als feedback over de motorpositie.
De sensoren kunnen worden aangesloten op de STSPIN32F0 via de J4-connector die wordt vermeld in
Tabel 3. Hall-/encoderconnector (J4).
| Naam | Pin | Beschrijving |
| Hal1/A+ | 1 | Hallsensor 1/encoder uit A+ |
| Hal2/B+ | 2 | Hallsensor 2/encoder uit B+ |
| Hal3/Z+ | 3 | Hallsensor 3/encoder nulterugkoppeling |
| VDD-sensor | 4 | Sensor voeding voltage |
| GND | 5 | Grond |
Een beveiligingsserieweerstand van 1 kΩ is in serie gemonteerd met sensoruitgangen.
Voor sensoren die een externe pull-up vereisen, zijn er al drie weerstanden van 10 kΩ op de uitgangslijnen gemonteerd en aangesloten op de VDD-vol.tage. Op dezelfde lijn is ook een voetafdruk voor pull-down-weerstanden beschikbaar.
De jumper JP3 selecteert de voeding voor de sensorvoeding voltage:
- Jumper tussen pin 1 – pin 2: Hall-sensoren gevoed door VUSB (5 V)
- Jumper tussen pin 1 – pin 2: Hall-sensoren gevoed door VDD (3.3 V)
De gebruiker kan de sensoruitgangen loskoppelen van de MCU GPIO-openingsjumpers JP5, JP6 en JP7.
4.2 Stroomdetectie
In het STEVAL-SPIN3201-bord wordt de stroomdetectiesignaalconditionering uitgevoerd via drie van de operationele amplifiers ingebed in het STSPIN32F0-apparaat.
In een typische FOC-toepassing worden de stromen in de drie halve bruggen gemeten met behulp van een shuntweerstand op de bron van elke stroomschakelaar aan de lage kant. Het gevoel voltagDe signalen worden aan een analoog-digitaalomzetter geleverd om de matrixberekening uit te voeren die verband houdt met een bepaalde besturingstechniek. Deze detectiesignalen worden meestal verschoven en ampondersteund door toegewijde op-amps om het volledige bereik van de ADC te benutten (zie figuur 3. Stroomdetectieschema example).
Figuur 3. Stroomdetectieschema example

De detectiesignalen moeten worden verschoven en gecentreerd op VDD/2 voltage (ongeveer 1.65 V) en ampopnieuw gelifificeerd, wat zorgt voor de afstemming tussen de maximale waarde van het gedetecteerde signaal en het volledige bereik van de ADC.
de voltage verschuiven stage introduceert verzwakking (1/Gp) van het terugkoppelsignaal die, samen met de versterking van de niet-inverterende configuratie (Gn, vastgelegd door Rn en Rf), bijdraagt aan de algehele versterking (G). Zoals reeds vermeld, is het doel om het geheel vast te stellen amplificatie netwerkversterking (G) zodat de voltage op de shuntweerstand die overeenkomt met de maximaal toegestane motorstroom (ISmax piekwaarde van nominale motorstroom) past in het bereik van voltages leesbaar door de ADC.

Opmerking dat, zodra G vast is, het beter is om deze te configureren door de initiële verzwakking 1/Gp zoveel mogelijk te verlagen en daarmee de versterking Gn. Dit is niet alleen belangrijk om het signaal te maximaliseren door de ruisverhouding, maar ook om het effect van de werking te verminderen.amp intrinsieke offset op de uitgang (evenredig met Gn).
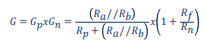
De winst en de polarisatie voltage (VOPout, pol) bepaalt het werkingsbereik van de stroomdetectiecircuits:
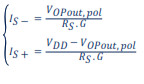 Waar:
Waar:
- IS- = maximale bronstroom
- IS+ = maximale verzonken stroom die door het circuit kan worden waargenomen.
Tabel 4. STEVE-SPIN3201 op-amps polarisatienetwerk
|
Parameter |
Onderdeelreferentie | Rev. 1 |
Rev. 3 |
| Rp | R14, R24, R33 | 560Ω | 1.78 kOhm |
| Ra | R12, R20, R29 | 8.2 kOhm | 27.4 kOhm |
| Rb | R15, R25, R34 | 560Ω | 27.4 kOhm |
| Rn | R13, R21, R30 | 1 kOhm | 1.78 kOhm |
| Rf | R9, R19, R28 | 15 kOhm | 13.7 kOhm |
| Cf | C15, C19, C20 | 100 pF | NM |
| G | – | 7.74 | 7.70 |
| VOPout, pol | – | 1.74V | 1.65V |
4.3 Overstroomdetectie
Het STEVAL-SPIN3201 evaluatiebord implementeert overstroombeveiliging op basis van de STSPIN32F0 geïntegreerde OC-comparator. Shuntweerstanden meten de belastingsstroom van elke fase. De weerstanden R50, R51 en R52 brengen de voltage signalen geassocieerd met elke belastingsstroom naar de OC_COMP-pin. Wanneer de piekstroom die in een van de drie fasen vloeit de geselecteerde drempel overschrijdt, wordt de geïntegreerde comparator geactiveerd en worden alle hoge stroomschakelaars uitgeschakeld. High-side stroomschakelaars worden weer ingeschakeld wanneer de stroom onder de drempel daalt, waardoor overstroombeveiliging wordt geïmplementeerd.
De huidige drempelwaarden voor het STEVAL-SPIN3201 evaluatiebord staan vermeld in
Tabel 5. Overstroomdrempels.
| PF6 | PF7 | Intern comp. drempelwaarde | OC-drempel |
| 0 | 1 | 100 mV | 20 Een |
| 1 | 0 | 250 mV | 65 Een |
| 1 | 1 | 500 mV | 140 Een |
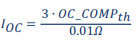
Deze drempelwaarden kunnen worden gewijzigd door de R43-voorspanningsweerstand te wijzigen. Het wordt aanbevolen om R43 hoger dan 30 kΩ te kiezen. Om de waarde van de R43 voor een doelstroomlimiet IOC te berekenen, kan de volgende formule worden gebruikt:

waarbij OC_COMPth de voltage-drempel van de interne comparator (geselecteerd door de PF6 en PF7), en VDD is het digitale voedingsvolume van 3.3 Vtage geleverd door de interne DCDC-buck-converter.
Door de R43 te verwijderen, wordt de huidige drempelformule als volgt vereenvoudigd:
4.4 Busvolumetaghet circuit
Het evaluatiebord STEVAL-SPIN3201 levert de bus voltage voelen. Dit signaal wordt verzonden via een voltage verdeler van de motorvoeding voltage (VBUS) (R10 en R16) en verzonden naar de PB1 GPIO (kanaal 9 van de ADC) van de ingebouwde MCU. Het signaal is ook beschikbaar op de TP6.
4.5 Hardwaregebruikersinterface
Het bord bevat de volgende hardware-gebruikersinterface-items:
- Potentiometer R6: stelt de doelsnelheid in, bijvample
- Schakelaar SW1: reset STSPIN32F0 MCU en ST-LINK V2
- Schakelaar SW2: gebruikersknop 1
- Schakelaar SW3: gebruikersknop 2
- LED DL3: gebruikers-LED 1 (gaat ook branden als knop van gebruiker 1 wordt ingedrukt)
- LED DL4: gebruikers-LED 2 (gaat ook branden wanneer knoppen van gebruiker 2 worden ingedrukt)
4.6 Foutopsporing
Het STEVAL-SPIN3201 evaluatiebord beschikt over een ST-LINK/V2-1 debugger/programmeur. De functies die op de ST-LINK worden ondersteund zijn:
- Hertelling van USB-software
- Virtuele com-poortinterface op USB aangesloten op PB6/PB7-pinnen van de STSPIN32F0 (UART1)
- Massaopslaginterface op USB
De stroomvoorziening voor de ST-LINK wordt geleverd door de host-pc via de USB-kabel die is aangesloten op de J5.
De LED LD2 biedt statusinformatie over de ST-LINK-communicatie: - Rode LED langzaam knipperend: bij inschakelen vóór USB-initialisatie
- Rode LED snel knipperend: na eerste correcte communicatie tussen PC en ST-LINK/V2-1 (opsomming)
- Rode LED AAN: initialisatie tussen de pc en ST-LINK/V2-1 is voltooid
- Groene LED AAN: succesvolle initialisatie van doelcommunicatie
- Rood/groene LED knippert: tijdens communicatie met het doel
- Groen AAN: communicatie voltooid en succesvol
De resetfunctie wordt van de ST-LINK losgekoppeld door jumper J8 te verwijderen.
Revisiegeschiedenis
Tabel 6. Document revisiegeschiedenis
| Datum | Herziening | Wijzigingen |
| 12-dec-20161 | 1 | Eerste release. |
| 23-2017-XNUMX | 2 | Paragraaf 4.2: Stroomdetectie toegevoegd op pagina 7. |
| 27-feb-2018 | 3 | Kleine wijzigingen in het hele document. |
| 18-2021-XNUMX | 4 | Kleine sjablooncorrectie. |
STMicroelectronics NV en haar dochterondernemingen (“ST”) behouden zich het recht voor om op elk moment en zonder voorafgaande kennisgeving wijzigingen, correcties, uitbreidingen, aanpassingen en verbeteringen aan te brengen aan ST-producten en/of aan dit document. Kopers moeten de meest recente relevante informatie over ST-producten verkrijgen voordat ze bestellingen plaatsen. ST-producten worden verkocht overeenkomstig de verkoopvoorwaarden van ST die van kracht zijn op het moment van orderbevestiging. Kopers zijn als enige verantwoordelijk voor de keuze, selectie en gebruik van ST-producten en ST aanvaardt geen aansprakelijkheid voor hulp bij de toepassing of het ontwerp van de producten van Kopers.
BELANGRIJKE MEDEDELING - LEES DIT ZORGVULDIG DOOR
ST verleent hierbij geen enkele licentie, expliciet of impliciet, op enig intellectueel eigendomsrecht.
Bij wederverkoop van ST-producten met bepalingen die afwijken van de hierin vermelde informatie, vervalt de garantie die ST op dat product verleent.
ST en het ST-logo zijn handelsmerken van ST. Raadpleeg voor meer informatie over ST-handelsmerken: www.st.com/trademarksAlle andere product- of servicenamen zijn eigendom van hun respectievelijke eigenaren.
De informatie in dit document vervangt de informatie die eerder in eerdere versies van dit document is verstrekt.
© 2021 STMicroelectronics – Alle rechten voorbehouden
Documenten / Bronnen
 |
ST UM2154 STEVAL-SPIN3201 Geavanceerde BLDC-controller met ingebedde STM32 MCU-evaluatiekaart [pdf] Gebruikershandleiding UM2154, STEVAL-SPIN3201 geavanceerde BLDC-controller met ingebedde STM32 MCU-evaluatiekaart |



