![]() 人生拡張
人生拡張
UM2154
ユーザーマニュアル
STEVE-SPIN3201:STM32MCU評価ボードが組み込まれた高度なBLDCコントローラー
導入
STEVAL-SPIN3201ボードは、STM3 MCUが統合された32相コントローラーであるSTSPIN0F3に基づく32相ブラシレスDCモータードライバーボードであり、電流読み取りトポロジーとして3シャント抵抗を実装しています。
家電製品、ファン、ドローン、電動工具などのさまざまなアプリケーションでデバイスを評価するための使いやすいソリューションを提供します。
このボードは、3シャントセンシングを備えたセンサー付きまたはセンサーレスのフィールド指向制御アルゴリズム用に設計されています。
図1.STEVE-SPIN3201評価ボード

ハードウェアとソフトウェアの要件
STEVAL-SPIN3201評価ボードを使用するには、次のソフトウェアとハードウェアが必要です。
- ソフトウェアパッケージをインストールするためのWindows®PC(XP、Vista 7、Windows 8、Windows 10)
- STEVAL-SPIN3201ボードをPCに接続するためのmini-BUSBケーブル
- STM32モーター制御ソフトウェア開発キットRevY(X-CUBE-MCSDK-Y)
- 互換性のあるvolを備えた3相ブラシレスDCモーターtageと現在の評価
- 外部DC電源。
はじめる
ボードの最大定格は次のとおりです。
- パワーstage供給量tage(VS)8 V〜45 V
- 15アームまでのモーター相電流
ボードを使用してプロジェクトを開始するには:
ステップ 1.ターゲット構成に従ってジャンパー位置を確認します (セクション4.3過電流検出を参照)
ステップ 2.モーターフェーズのシーケンスに注意して、モーターをコネクターJ3に接続します。
ステップ 3.コネクタJ1の入力2と2を介してボードに電源を供給します。 DL1(赤)LEDが点灯します。
ステップ 4.STM32モーター制御ソフトウェア開発キットRevYを使用してアプリケーションを開発します (X-CUBEMCSDK-Y)。
ハードウェアの説明と構成
形 2. 主要コンポーネントとコネクタの位置は、ボード上の主要コンポーネントとコネクタの位置を示しています。
形 2. 主なコンポーネントとコネクタの位置

表1. ハードウェア設定ジャンパーは、コネクターの詳細なピン配置を提供します。
表1. ハードウェア設定ジャンパー
| ジャンパー | 許可される構成 | デフォルト状態 |
| JP1 | Vモーターに接続されたVREGの選択 | 開ける |
| JP2 | DC電源に接続された選択モーター電源 | 閉店 |
| JP3 | USB(1)/ VDD(3)電源への選択ホールエンコーダ電源 | 1 –2クローズ |
| JP4 | ST-LINK(U4)の選択リセット | 開ける |
| JP5 | ホール2に接続された選択PA3 | 閉店 |
| JP6 | ホール1に接続された選択PA2 | 閉店 |
| JP7 | ホール0に接続された選択PA1 | 閉店 |
表2. その他のコネクタ、ジャンパ、およびテストポイントの説明
|
名前 |
ピン | ラベル |
説明 |
| J1 | 1 – 2 | J1 | モーター電源 |
| J2 | 1 – 2 | J2 | デバイスの主電源(VM) |
| J3 | 1 – 2 – 3 | U、V、W | 三相BLDCモーター相接続 |
| J4 | 1 – 2 – 3 | J4 | ホール/エンコーダセンサーコネクタ |
| 4 – 5 | J4 | ホールセンサー/エンコーダー供給 | |
| J5 | – | J5 | USB入力ST-LINK |
| J6 | 1 | 3V3 | ST-LINK電源 |
| 2 | クロック | ST-LINKのSWCLK | |
| 3 | グランド | グランド | |
| 4 | ディオ | ST-LINKのSWDIO | |
| J7 | 1 – 2 | J7 | カート |
| J8 | 1 – 2 | J8 | ST-LINKリセット |
| TP1 | – | グレッグ | 12V巻tageレギュレーター出力 |
| TP2 | – | グランド | グランド |
| TP3 | – | 電圧 | 電圧 |
| TP4 | – | スピード | 速度ポテンショメータ出力 |
| TP5 | – | PA3 | PA3 GPIO(出力操作-amp センス1) |
| TP6 | – | Vバス | VBusフィードバック |
| TP7 | – | アウト_U | 出力U |
| TP8 | – | PA4 | PA4 GPIO(出力操作-amp センス2) |
| TP9 | – | PA5 | PA5 GPIO(出力操作-amp センス3) |
| TP10 | – | グランド | グランド |
| TP11 | – | OUT_V | 出力V |
| TP12 | – | PA7 | PA7_3FG |
| TP13 | – | アウト_W | 出力W |
| TP14 | – | 3V3 | 3V3 ST-リンク |
| TP15 | – | 5V | USBvol。tage |
| TP16 | – | 入出力 | SWD_IO |
| TP17 | – | クロック | SWD_CLK |
回路記述
STEVAL-SPIN3201は、STSPIN3F32(STM0 MCUが組み込まれた高度なBLDCコントローラー)とトリプルハーフブリッジ電源で構成される完全な32シャントFOCソリューションを提供します。tageはNMOSSTD140N6F7を使用します。
STSPIN32F0は、必要なすべての供給量を自律的に生成しますtages:内部DC / DCバックコンバータは3V3を提供し、内部リニアレギュレータはゲートドライバに12Vを提供します。
電流フィードバック信号の調整は、XNUMXつの操作を通じて実行されます ampデバイスに組み込まれたリファイアと内部コンパレータは、シャント抵抗からの過電流保護を実行します。
XNUMXつのユーザーボタン、XNUMXつのLED、およびトリマーを使用して、単純なユーザーインターフェイスを実装できます(たとえば、モーターの始動/停止、目標速度の設定)。
STEVAL-SPIN3201ボードは、モーター位置フィードバックとして直交エンコーダーとデジタルホールセンサーをサポートします。
ボードにはST-LINK-V2が含まれており、ユーザーは追加のハードウェアツールなしでファームウェアをデバッグおよびダウンロードできます。
4.1ホール/エンコーダモーター速度センサー
STEVAL-SPIN3201評価ボードは、モーター位置フィードバックとしてデジタルホールおよび直交エンコーダセンサーをサポートします。
センサーは、J32コネクタを介してSTSPIN0F4に接続できます。
表3.ホール/エンコーダコネクタ(J4)。
| 名前 | ピン | 説明 |
| Hall1 / A + | 1 | ホールセンサー1 /エンコーダー出力A + |
| Hall2 / B + | 2 | ホールセンサー2 /エンコーダー出力B + |
| Hall3 / Z + | 3 | ホールセンサー3 /エンコーダーゼロフィードバック |
| VDDセンサー | 4 | センサー供給量tage |
| グランド | 5 | 地面 |
1kの保護直列抵抗Ω センサー出力と直列に取り付けられています。
外部プルアップを必要とするセンサーの場合、10つのXNUMXkΩ抵抗がすでに出力ラインに取り付けられており、VDDvolに接続されています。tage。 同じラインで、プルダウン抵抗のフットプリントも利用できます。
ジャンパーJP3はセンサー電源volの電源を選択しますtage:
- ピン1とピン2の間のジャンパー:VUSB(5 V)を動力源とするホールセンサー
- ピン1とピン2の間のジャンパー:VDD(3.3 V)で駆動されるホールセンサー
ユーザーは、MCU GPIOオープニングジャンパーJP5、JP6、およびJP7からセンサー出力を切断できます。
4.2電流検出
STEVAL-SPIN3201ボードでは、電流検出信号の調整は、XNUMXつの操作で実行されます。 ampSTSPIN32F0デバイスに組み込まれたリファイア。
一般的なFOCアプリケーションでは、XNUMXつのハーフブリッジの電流は、各ローサイド電源スイッチのソースにあるシャント抵抗を使用して検出されます。 センスvoltage信号は、特定の制御技術に関連するマトリックス計算を実行するために、アナログ-デジタルコンバーターに提供されます。 これらの感覚信号は通常シフトされ、 amp専用のop-によってllifiedamp■ADCの全範囲を活用するために(図3を参照してください。電流検出方式example)。
図3.電流検出方式example

センス信号はシフトされ、VDD / 2volを中心に配置する必要がありますtage(約1.65 V)および ampこれは、検出された信号の最大値とADCのフルスケール範囲の間のマッチングを提供します。
巻tageシフトstageは、フィードバック信号の減衰(1 / Gp)を導入します。これは、非反転構成のゲイン(Gn、RnとRfで固定)とともに、全体のゲイン(G)に寄与します。 すでに述べたように、目標は全体を確立することです amplificationネットワークゲイン(G)tag最大モーター許容電流(モーター定格電流のISmaxピーク値)に対応するシャント抵抗のeは、volの範囲に適合します。tagesはADCで読み取り可能です。

注記 つまり、Gが固定されたら、初期減衰1 / Gpを可能な限り低くして、ゲインGnを低くして構成することをお勧めします。 これは、ノイズ比によって信号を最大化するだけでなく、オペアンプの影響を減らすためにも重要です。amp 出力の固有オフセット(Gnに比例)。
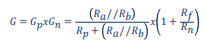
ゲインと偏光voltage(VOPout、pol)は、電流検出回路の動作範囲を決定します。
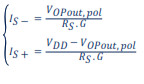 どこ:
どこ:
- IS- =最大ソース電流
- IS + =回路が検出できる最大沈下電流。
表4.STEVE-SPIN3201 op-amps偏波ネットワーク
|
パラメータ |
パーツリファレンス | 改訂1版 |
改訂3版 |
| Rp | R14、R24、R33 | 560Ω | 1.78kΩ |
| Ra | R12、R20、R29 | 8.2kΩ | 27.4kΩ |
| Rb | R15、R25、R34 | 560Ω | 27.4kΩ |
| Rn | R13、R21、R30 | 1kΩ | 1.78kΩ |
| Rf | R9、R19、R28 | 15kΩ | 13.7kΩ |
| Cf | C15、C19、C20 | 100pF | ニューメキシコ |
| G | – | 7.74 | 7.70 |
| VOPout、pol | – | 1.74ボルト | 1.65ボルト |
4.3過電流検出
STEVAL-SPIN3201評価ボードは、STSPIN32F0統合OCコンパレータに基づく過電流保護を実装しています。 シャント抵抗は、各相の負荷電流を測定します。 抵抗R50、R51、およびR52はvolをもたらしますtagOC_COMPピンへの各負荷電流に関連するe信号。 XNUMXつのフェーズのいずれかに流れるピーク電流が選択したしきい値を超えると、統合コンパレータがトリガーされ、すべてのハイサイド電源スイッチが無効になります。 電流がしきい値を下回ると、ハイサイド電源スイッチが再び有効になり、過電流保護が実装されます。
STEVAL-SPIN3201評価ボードの現在のしきい値は次のとおりです。
表5.過電流しきい値。
| PF6 | PF7 | 内部コンプ。 しきい値 | OCしきい値 |
| 0 | 1 | 100 mV | 20A |
| 1 | 0 | 250 mV | 65A |
| 1 | 1 | 500 mV | 140A |
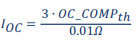
これらのしきい値は、R43バイアス抵抗を変更することで変更できます。 43kΩより高いR30を選択することをお勧めします。 目標電流制限IOCのR43の値を計算するには、次の式を使用できます。

ここで、OC_COMPthはvolです。tage内部コンパレータのしきい値(PF6およびPF7によって選択)。VDDは3.3Vデジタル電源ボリュームです。tageは内部DCDCバックコンバーターによって提供されます。
R43を削除すると、現在のしきい値の式は次のように簡略化されます。
4.4バスvoltage回路
STEVAL-SPIN3201評価ボードはバスボリュームを提供しますtageセンシング。 この信号はvolを介して送信されますtagモーター供給volからのeディバイダーtage(VBUS)(R10およびR16)で、組み込みMCUのPB1 GPIO(ADCのチャネル9)に送信されます。 信号はTP6でも利用できます。
4.5ハードウェアユーザーインターフェース
ボードには、次のハードウェアユーザーインターフェイスアイテムが含まれています。
- ポテンショメータR6:目標速度を設定します。ample
- スイッチSW1:STSPIN32F0MCUとST-LINKV2をリセットします
- スイッチSW2:ユーザーボタン1
- スイッチSW3:ユーザーボタン2
- LED DL3:ユーザーLED 1(ユーザー1ボタンが押されたときにも点灯します)
- LED DL4:ユーザーLED 2(ユーザー2のボタンが押されたときにも点灯します)
4.6 デバッグ
STEVAL-SPIN3201評価ボードには、ST-LINK / V2-1デバッガー/プログラマーが組み込まれています。 ST-LINKでサポートされている機能は次のとおりです。
- USBソフトウェアの再列挙
- STSPIN6F7(UART32)のPB0 / PB1ピンに接続されたUSB上の仮想COMポートインターフェイス
- USBの大容量ストレージインターフェイス
ST-LINKの電源は、J5に接続されたUSBケーブルを介してホストPCから供給されます。
LED LD2は、ST-LINK通信ステータス情報を提供します。 - 赤色のLEDがゆっくり点滅:電源投入時、USB初期化前
- 赤色のLEDがすばやく点滅:PCとST-LINK / V2-1(列挙)間の最初の正しい通信に続いて
- 赤色LED点灯:PCとST-LINK / V2-1間の初期化が完了しました
- 緑のLEDが点灯:ターゲット通信の初期化が成功しました
- 赤/緑のLED点滅:ターゲットとの通信中
- 緑点灯:通信が終了し、成功しました
ジャンパーJ8を取り外すと、リセット機能がST-LINKから切断されます。
改訂履歴
表6. 文書の改訂履歴
| 日付 | リビジョン | 変更点 |
| 12年20161月XNUMX日 | 1 | 初回リリース。 |
| 23年2017月XNUMX日 | 2 | 4.2ページのセクション7:電流検出を追加しました。 |
| 27年2018月XNUMX日 | 3 | ドキュメント全体のマイナーな変更。 |
| 18年2021月XNUMX日 | 4 | テンプレートのマイナーな修正。 |
STMicroelectronics NVおよびその子会社(「ST」)は、ST製品および/または本書を予告なしにいつでも変更、修正、拡張、修正、および改善する権利を留保します。 購入者は、注文する前に、ST製品に関する最新の関連情報を入手する必要があります。 ST製品は、注文確認時にSTの販売条件に従って販売されます。 購入者は、ST製品の選択、選択、および使用について単独で責任を負い、STは、アプリケーションの支援または購入者の製品の設計について責任を負いません。
重要なお知らせ–注意深くお読みください
ST は、明示的か黙示的かを問わず、いかなる知的財産権のライセンスも付与しません。
ここに記載されている情報と異なる規定を伴う ST 製品を再販した場合、当該製品に対して ST が付与した保証は無効になります。
STおよびSTロゴはSTの商標です。 STの商標の詳細については、以下を参照してください。 www.st.com/商標その他すべての製品名またはサービス名は、それぞれの所有者の財産です。
このドキュメントの情報は、このドキュメントの以前のバージョンで以前に提供された情報に優先し、置き換えられます。
© 2021 STマイクロエレクトロニクス – 無断転載を禁じます
ドキュメント / リソース
 |
ST UM2154STEVAL-STM3201MCU評価ボードが組み込まれた高度なBLDCコントローラー [pdf] ユーザーマニュアル UM2154、STEVAL-STM3201MCU評価ボードが組み込まれた高度なBLDCコントローラー |



