![]() ชีวิต
ชีวิต
UM2154
คู่มือการใช้งาน
STEVE-SPIN3201: คอนโทรลเลอร์ BLDC ขั้นสูงพร้อมบอร์ดประเมินผล STM32 MCU ในตัว
การแนะนำ
บอร์ด STEVAL-SPIN3201 เป็นบอร์ดควบคุมมอเตอร์กระแสตรงแบบไม่มีแปรงถ่าน 3 เฟสที่ใช้ STSPIN32F0 ซึ่งเป็นตัวควบคุม 3 เฟสพร้อม STM32 MCU ในตัว และใช้ตัวต้านทานแบบ 3 ตัวแบ่งเป็นโทโพโลยีการอ่านค่าปัจจุบัน
เป็นโซลูชันที่ใช้งานง่ายสำหรับการประเมินอุปกรณ์ในการใช้งานต่างๆ เช่น เครื่องใช้ในบ้าน พัดลม โดรน และเครื่องมือไฟฟ้า
บอร์ดได้รับการออกแบบสำหรับอัลกอริธึมการควบคุมภาคสนามแบบเซนเซอร์หรือแบบไม่มีเซนเซอร์ด้วยการตรวจจับแบบ 3-shunt
รูปที่ 1 คณะกรรมการประเมินผล STEVE-SPIN3201

ข้อกำหนดฮาร์ดแวร์และซอฟต์แวร์
การใช้บอร์ดประเมินผล STEVAL-SPIN3201 ต้องใช้ซอฟต์แวร์และฮาร์ดแวร์ต่อไปนี้:
- Windows ® PC (XP, Vista 7, Windows 8, Windows 10) เพื่อติดตั้งซอฟต์แวร์แพ็คเกจ
- สาย USB mini-B เพื่อเชื่อมต่อบอร์ด STEVAL-SPIN3201 กับ PC
- ชุดพัฒนาซอฟต์แวร์ควบคุมมอเตอร์ STM32 Rev Y (X-CUBE-MCSDK-Y)
- มอเตอร์ DC แบบไม่มีแปรงถ่าน 3 เฟสพร้อมวอลโว่ที่เข้ากันได้tage และการให้คะแนนปัจจุบัน
- แหล่งจ่ายไฟ DC ภายนอก
การเริ่มต้น
การจัดอันดับสูงสุดของคณะกรรมการมีดังต่อไปนี้:
- กำลัง stage อุปทานฉบับที่tage (VS) จาก 8 V ถึง 45 V
- เฟสมอเตอร์กระแสสูงถึง 15 Arms
ในการเริ่มโครงการของคุณกับกระดาน:
ขั้นตอน 1. ตรวจสอบตำแหน่งจัมเปอร์ตามการกำหนดค่าเป้าหมาย (ดูหัวข้อ 4.3 การตรวจจับกระแสเกิน
ขั้นตอน 2. ต่อมอเตอร์เข้ากับขั้วต่อ J3 เพื่อดูแลลำดับเฟสของมอเตอร์
ขั้นตอน 3. จ่ายบอร์ดผ่านอินพุต 1 และ 2 ของขั้วต่อ J2 ไฟ LED DL1 (สีแดง) จะเปิดขึ้น
ขั้นตอน 4. พัฒนาแอปพลิเคชันของคุณโดยใช้ชุดพัฒนาซอฟต์แวร์ควบคุมมอเตอร์ STM32 Rev Y (X-CUBEMCSDK-Y)
คำอธิบายและการกำหนดค่าฮาร์ดแวร์
รูป 2. ส่วนประกอบหลักและตำแหน่งของคอนเนคเตอร์แสดงตำแหน่งของส่วนประกอบหลักและคอนเนคเตอร์บนบอร์ด
รูป 2. ส่วนประกอบหลักและตำแหน่งตัวเชื่อมต่อ

ตารางที่ 1. จัมเปอร์การตั้งค่าฮาร์ดแวร์ให้รายละเอียดพินเอาต์ของตัวเชื่อมต่อ
ตารางที่ 1. จัมเปอร์ตั้งค่าฮาร์ดแวร์
| จัมเปอร์ | การกำหนดค่าที่อนุญาต | เงื่อนไขเริ่มต้น |
| JP1 | การเลือก VREG ที่เชื่อมต่อกับมอเตอร์ V | เปิด |
| JP2 | การเลือกแหล่งจ่ายไฟมอเตอร์ที่เชื่อมต่อกับแหล่งจ่ายไฟ DC | ปิด |
| JP3 | Selection Hall encoder จ่ายไฟให้กับ USB (1) / VDD (3) power supply | 1 – 2 ปิด |
| JP4 | รีเซ็ตการเลือกของ ST-LINK (U4) | เปิด |
| JP5 | การเลือก PA2 เชื่อมต่อกับ Hall 3 | ปิด |
| JP6 | การเลือก PA1 เชื่อมต่อกับ Hall 2 | ปิด |
| JP7 | การเลือก PA0 เชื่อมต่อกับ Hall 1 | ปิด |
ตารางที่ 2. คำอธิบายตัวเชื่อมต่อ จัมเปอร์ และจุดทดสอบอื่นๆ
|
ชื่อ |
เข็มหมุด | ฉลาก |
คำอธิบาย |
| J1 | 1 – 2 | J1 | แหล่งจ่ายไฟของมอเตอร์ |
| J2 | 1 – 2 | J2 | แหล่งจ่ายไฟหลักของอุปกรณ์ (VM) |
| J3 | 1 – 2 – 3 | ยู, วี, ดับบลิว | การเชื่อมต่อเฟสมอเตอร์ BLDC 3 เฟส |
| J4 | 1 – 2 – 3 | J4 | ขั้วต่อเซนเซอร์ Hall/encoder |
| 4 – 5 | J4 | ฮอลล์เซนเซอร์/อุปทานเอ็นโค้ดเดอร์ | |
| J5 | – | J5 | อินพุต USB ST-LINK |
| J6 | 1 | 3V3 | พาวเวอร์ซัพพลาย ST-LINK |
| 2 | ซีแอลเค | SWLK ของ ST-LINK | |
| 3 | ก.ย.ด. | ก.ย.ด. | |
| 4 | ดิโอ | SWDIO ของ ST-LINK | |
| J7 | 1 – 2 | J7 | รถเข็น |
| J8 | 1 – 2 | J8 | รีเซ็ต ST-LINK |
| TP1 | – | เกร็ก | ปริมาตร 12 Vtagอี เรกูเลเตอร์ เอาท์พุต |
| TP2 | – | ก.ย.ด. | ก.ย.ด. |
| TP3 | – | วีดีดี | วีดีดี |
| TP4 | – | ความเร็ว | เอาท์พุทโพเทนชิออมิเตอร์ความเร็ว |
| TP5 | – | PA3 | PA3 GPIO (เอาต์พุตออฟ-amp ความรู้สึก 1) |
| TP6 | – | วีบัส | ความคิดเห็นของ VBus |
| TP7 | – | ออก_U | เอาต์พุต U |
| TP8 | – | PA4 | PA4 GPIO (เอาต์พุตออฟ-amp ความรู้สึก 2) |
| TP9 | – | PA5 | PA5 GPIO (เอาต์พุตออฟ-amp ความรู้สึก 3) |
| TP10 | – | ก.ย.ด. | ก.ย.ด. |
| TP11 | – | ออก_วี | เอาต์พุต V. |
| TP12 | – | PA7 | PA7_3FG |
| TP13 | – | ออก_W | เอาต์พุต W |
| TP14 | – | 3V3 | 3V3 ST-LINK |
| TP15 | – | 5V | ไดรฟ์ USBtage |
| TP16 | – | ไอ/โอ | SWD_IO |
| TP17 | – | ซีแอลเค | SWD_CLK |
คำอธิบายวงจร
STEVAL-SPIN3201 นำเสนอโซลูชัน FOC แบบ 3-shunt ที่สมบูรณ์ซึ่งประกอบด้วย STSPIN32F0 – คอนโทรลเลอร์ BLDC ขั้นสูงพร้อม STM32 MCU ในตัว – และพาวเวอร์ฮาล์ฟบริดจ์สามตัวtagกับ NMOS STD140N6F7
STSPIN32F0 จะสร้างปริมาณอุปทานที่จำเป็นทั้งหมดโดยอัตโนมัติtages: ตัวแปลงบั๊ก DC/DC ภายในให้ 3V3 และตัวควบคุมเชิงเส้นภายในให้ 12 V สำหรับไดรเวอร์เกท
การปรับสภาพสัญญาณป้อนกลับในปัจจุบันจะดำเนินการผ่านสามส่วนการทำงาน amplifiers ที่ฝังอยู่ในอุปกรณ์และตัวเปรียบเทียบภายในทำการป้องกันกระแสเกินจากตัวต้านทานแบบแบ่ง
มีปุ่มผู้ใช้สองปุ่ม ไฟ LED สองดวง และทริมเมอร์ เพื่อใช้อินเทอร์เฟซผู้ใช้อย่างง่าย (เช่น การสตาร์ท/หยุดมอเตอร์ และการตั้งค่าความเร็วเป้าหมาย)
บอร์ด STEVAL-SPIN3201 รองรับตัวเข้ารหัสการสร้างพื้นที่สี่เหลี่ยมจัตุรัสและเซ็นเซอร์ Hall แบบดิจิตอลเป็นการตอบกลับตำแหน่งมอเตอร์
บอร์ดนี้มี ST-LINK-V2 ที่ช่วยให้ผู้ใช้สามารถดีบักและดาวน์โหลดเฟิร์มแวร์โดยไม่ต้องใช้เครื่องมือฮาร์ดแวร์เพิ่มเติม
4.1 เซ็นเซอร์ความเร็วมอเตอร์ Hall/encoder
บอร์ดประเมินผล STEVAL-SPIN3201 รองรับเซนเซอร์ Hall และ quadrature encoder แบบดิจิตอลเป็นข้อมูลป้อนกลับตำแหน่งมอเตอร์
เซ็นเซอร์สามารถเชื่อมต่อกับ STSPIN32F0 ผ่านตัวเชื่อมต่อ J4 ที่อยู่ในรายการ
ตารางที่ 3. ขั้วต่อฮอลล์/ตัวเข้ารหัส (J4)
| ชื่อ | เข็มหมุด | คำอธิบาย |
| ฮอลล์1/A+ | 1 | Hall sensor 1/encoder ออก A+ |
| ฮอลล์2/B+ | 2 | Hall sensor 2/ตัวเข้ารหัสออก B+ |
| ฮอลล์3/Z+ | 3 | เซ็นเซอร์ฮอลล์ 3 / ตัวเข้ารหัสศูนย์การป้อนกลับ |
| เซ็นเซอร์ VDD | 4 | ปริมาณการจ่ายเซ็นเซอร์tage |
| ก.ย.ด. | 5 | พื้น |
ตัวต้านทานซีรีย์การป้องกัน 1 kΩ ติดตั้งในชุดที่มีเอาต์พุตเซ็นเซอร์
สำหรับเซ็นเซอร์ที่ต้องการดึงขึ้นภายนอก ตัวต้านทาน 10 kΩ สามตัวได้รับการติดตั้งบนสายเอาต์พุตและเชื่อมต่อกับ VDD voltagอี ในบรรทัดเดียวกัน รอยเท้าสำหรับตัวต้านทานแบบดึงลงก็มีให้เช่นกัน
จัมเปอร์ JP3 เลือกแหล่งจ่ายไฟสำหรับเซ็นเซอร์อุปทาน voltage:
- จัมเปอร์ระหว่างพิน 1 – พิน 2: เซ็นเซอร์ฮอลล์ที่ขับเคลื่อนโดย VUSB (5 V)
- จัมเปอร์ระหว่างพิน 1 – พิน 2: เซ็นเซอร์ฮอลล์ที่ขับเคลื่อนโดย VDD (3.3 V)
ผู้ใช้สามารถตัดการเชื่อมต่อเอาต์พุตเซ็นเซอร์จากจัมเปอร์เปิด MCU GPIO JP5, JP6 และ JP7
4.2 การตรวจจับกระแส
ในบอร์ด STEVAL-SPIN3201 การปรับสภาพสัญญาณการตรวจจับปัจจุบันจะดำเนินการผ่านสามการทำงาน amplifiers ที่ฝังอยู่ในอุปกรณ์ STSPIN32F0
ในการใช้งาน FOC ทั่วไป กระแสในฮาล์ฟบริดจ์ทั้งสามจะถูกตรวจจับโดยใช้ตัวต้านทานแบบแบ่งที่แหล่งกำเนิดของสวิตช์เปิดปิดด้านต่ำแต่ละตัว ความรู้สึก voltagสัญญาณ e ถูกจัดเตรียมให้กับตัวแปลงอนาล็อกเป็นดิจิตอลเพื่อทำการคำนวณเมทริกซ์ที่เกี่ยวข้องกับเทคนิคการควบคุมบางอย่าง สัญญาณความรู้สึกเหล่านั้นมักจะถูกเลื่อนและ amplified โดยทุ่มเท op-ampเพื่อใช้ประโยชน์จาก ADC อย่างเต็มรูปแบบ (ดูรูปที่ 3 รูปแบบการตรวจจับปัจจุบัน example)
รูปที่ 3 รูปแบบการตรวจจับปัจจุบัน เช่นample

ต้องเปลี่ยนสัญญาณความรู้สึกและเน้นที่ VDD/2 voltage (ประมาณ 1.65 V) และ ampกลับกลายเป็นอีกครั้งซึ่งให้การจับคู่ระหว่างค่าสูงสุดของสัญญาณที่ตรวจจับได้กับช่วงเต็มสเกลของ ADC
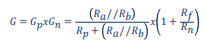
ฉบับที่tage ขยับ stage แนะนำการลดทอน (1/Gp) ของสัญญาณป้อนกลับซึ่งร่วมกับเกนของการกำหนดค่าที่ไม่กลับด้าน (Gn, คงที่โดย Rn และ Rf) มีส่วนทำให้เกนโดยรวม (G) ดังที่ได้กล่าวไปแล้ว เป้าหมายคือการสร้างภาพรวม amplification เครือข่ายได้รับ (G) เพื่อให้ voltage บนตัวต้านทาน shunt ที่สอดคล้องกับกระแสสูงสุดของมอเตอร์ที่อนุญาต (ค่าสูงสุดของ ISmax ของกระแสไฟที่กำหนดของมอเตอร์) เหมาะกับช่วงของปริมาตรtagADC สามารถอ่านได้

บันทึก ว่าเมื่อ G ได้รับการแก้ไขแล้ว จะดีกว่าในการกำหนดค่าโดยลดการลดทอนเริ่มต้น 1/Gp ให้มากที่สุดเท่าที่จะเป็นไปได้และทำให้ได้รับ Gn นี่เป็นสิ่งสำคัญที่ไม่เพียงแต่จะเพิ่มสัญญาณให้สูงสุดด้วยอัตราส่วนสัญญาณรบกวนเท่านั้น แต่ยังต้องลดผลกระทบของสัญญาณรบกวนamp intrinsic offset บนเอาต์พุต (สัดส่วนกับ Gn)
เกนและโพลาไรเซชัน voltage (VOPout, pol) กำหนดช่วงการทำงานของวงจรตรวจจับกระแส:
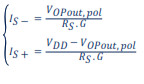 ที่ไหน:
ที่ไหน:
- IS- = แหล่งกระแสสูงสุด
- IS+ = กระแสจมสูงสุดที่วงจรตรวจจับได้
ตารางที่ 4. STEVE-SPIN3201 op-ampเครือข่ายโพลาไรซ์
|
พารามิเตอร์ |
อ้างอิงชิ้นส่วน | ปรับปรุงครั้งที่ 1 |
ปรับปรุงครั้งที่ 3 |
| Rp | อาร์14, อาร์24, อาร์33 | 560 โอห์ม | 1.78 kΩ |
| Ra | อาร์12, อาร์20, อาร์29 | 8.2 kΩ | 27.4 kΩ |
| Rb | อาร์15, อาร์25, อาร์34 | 560 โอห์ม | 27.4 kΩ |
| Rn | อาร์13, อาร์21, อาร์30 | 1 kΩ | 1.78 kΩ |
| Rf | อาร์9, อาร์19, อาร์28 | 15 kΩ | 13.7 kΩ |
| Cf | ซี15, ซี19, ซี20 | 100 พิกฟาเรนไฮต์ | เอ็นเอ็ม |
| G | – | 7.74 | 7.70 |
| VOPout โพล | – | 1.74 โวลต์ | 1.65 โวลต์ |
4.3 การตรวจจับกระแสเกิน
บอร์ดประเมินผล STEVAL-SPIN3201 ใช้การป้องกันกระแสเกินโดยอิงจากตัวเปรียบเทียบ OC ในตัว STSPIN32F0 ตัวต้านทาน Shunt วัดกระแสโหลดของแต่ละเฟส ตัวต้านทาน R50, R51 และ R52 นำปริมาตรtage สัญญาณที่เกี่ยวข้องกับกระแสโหลดแต่ละอันไปยังพิน OC_COMP เมื่อกระแสสูงสุดที่ไหลในหนึ่งในสามเฟสเกินเกณฑ์ที่เลือก ตัวเปรียบเทียบแบบรวมจะถูกทริกเกอร์และสวิตช์เปิดปิดด้านสูงทั้งหมดจะถูกปิดใช้งาน สวิตช์เปิดปิดด้านสูงจะเปิดใช้งานอีกครั้งเมื่อกระแสไฟต่ำกว่าเกณฑ์ ดังนั้นจึงใช้การป้องกันกระแสเกิน
เกณฑ์ปัจจุบันสำหรับคณะกรรมการประเมิน STEVAL-SPIN3201 แสดงอยู่ใน
ตารางที่ 5. ขีดจำกัดกระแสเกิน
| พีเอฟ6 | พีเอฟ7 | คอมพ์ภายใน เกณฑ์ | เกณฑ์ OC |
| 0 | 1 | 100 mV | 20 ก |
| 1 | 0 | 250 mV | 65 ก |
| 1 | 1 | 500 mV | 140 ก |
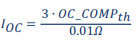
เกณฑ์เหล่านี้สามารถแก้ไขได้โดยการเปลี่ยนตัวต้านทานอคติ R43 ขอแนะนำให้เลือก R43 ที่สูงกว่า 30 kΩ ในการคำนวณค่าของ R43 สำหรับขีดจำกัดปัจจุบันของเป้าหมาย IOC สามารถใช้สูตรต่อไปนี้ได้:

โดยที่ OC_COMPth คือ voltagขีด จำกัด ของตัวเปรียบเทียบภายใน (เลือกโดย PF6 และ PF7) และ VDD คือปริมาตรการจ่ายดิจิตอล 3.3 Vtage จัดทำโดยตัวแปลงบั๊ก DCDC ภายใน
การนำ R43 ออก สูตรขีดจำกัดปัจจุบันจะง่ายขึ้นดังนี้:
4.4 รถโดยสารประจำทางtagวงจรไฟฟ้า
บอร์ดประเมินผล STEVAL-SPIN3201 จัดให้มีบัส voltagการรับรู้ทางอิเล็กทรอนิกส์ สัญญาณนี้ถูกส่งผ่าน voltage ตัวแบ่งจากแหล่งจ่ายมอเตอร์ voltage (VBUS) (R10 และ R16) และส่งไปยัง PB1 GPIO (ช่อง 9 ของ ADC) ของ MCU แบบฝัง สัญญาณยังมีอยู่ใน TP6
4.5 ส่วนต่อประสานผู้ใช้ฮาร์ดแวร์
บอร์ดนี้มีรายการอินเทอร์เฟซผู้ใช้ฮาร์ดแวร์ต่อไปนี้:
- Potentiometer R6: ตั้งค่าความเร็วเป้าหมายเช่นample
- สวิตช์ SW1: รีเซ็ต STSPIN32F0 MCU และ ST-LINK V2
- สวิตช์ SW2: ปุ่มผู้ใช้ 1
- สวิตช์ SW3: ปุ่มผู้ใช้ 2
- LED DL3: LED ผู้ใช้ 1 (เปิดเมื่อผู้ใช้กดปุ่ม 1 ด้วย)
- LED DL4: LED ผู้ใช้ 2 (เปิดเมื่อผู้ใช้กดปุ่ม 2 ปุ่มด้วย)
4.6 การดีบัก
บอร์ดประเมินผล STEVAL-SPIN3201 ฝังตัวดีบักเกอร์/โปรแกรมเมอร์ ST-LINK/V2-1 คุณสมบัติที่รองรับบน ST-LINK คือ:
- การแจงนับซอฟต์แวร์ USB อีกครั้ง
- อินเทอร์เฟซพอร์ต com เสมือนบน USB ที่เชื่อมต่อกับพิน PB6/PB7 ของ STSPIN32F0 (UART1)
- อินเทอร์เฟซที่เก็บข้อมูลขนาดใหญ่บน USB
แหล่งจ่ายไฟสำหรับ ST-LINK มีให้โดยโฮสต์พีซีผ่านสาย USB ที่เชื่อมต่อกับ J5
LED LD2 ให้ข้อมูลสถานะการสื่อสารของ ST-LINK: - LED สีแดงกะพริบช้าๆ: เมื่อเปิดเครื่องก่อนการเริ่มต้น USB
- ไฟ LED สีแดงกะพริบอย่างรวดเร็ว: ตามการสื่อสารที่ถูกต้องครั้งแรกระหว่างพีซีกับ ST-LINK/V2-1 (การแจงนับ)
- ไฟ LED สีแดงติด: การเริ่มต้นระหว่าง PC และ ST-LINK/V2-1 เสร็จสมบูรณ์
- ไฟ LED สีเขียวติด: เริ่มต้นการสื่อสารเป้าหมายสำเร็จ
- ไฟ LED สีแดง/เขียวกะพริบ: ขณะสื่อสารกับเป้าหมาย
- เปิดสีเขียว: การสื่อสารเสร็จสิ้นและประสบความสำเร็จ
ฟังก์ชั่นรีเซ็ตถูกตัดการเชื่อมต่อจาก ST-LINK โดยถอดจัมเปอร์ J8
ประวัติการแก้ไข
ตารางที่ 6 ประวัติการแก้ไขเอกสาร
| วันที่ | การแก้ไข | การเปลี่ยนแปลง |
| 12 ธ.ค. 20161 | 1 | การเปิดตัวครั้งแรก |
| 23 พ.ย. 2017 | 2 | เพิ่มส่วนที่ 4.2: การตรวจจับปัจจุบันในหน้า 7 |
| 27 ก.พ. 2018 | 3 | แก้ไขเล็กน้อยตลอดทั้งเอกสาร |
| 18 ส.ค. 2021 | 4 | การแก้ไขเทมเพลตเล็กน้อย |
STMicroelectronics NV และบริษัทในเครือ (“ST”) ขอสงวนสิทธิ์ในการเปลี่ยนแปลง แก้ไข ปรับปรุง ดัดแปลง และปรับปรุงผลิตภัณฑ์ ST และ/หรือเอกสารนี้ได้ทุกเมื่อโดยไม่ต้องแจ้งให้ทราบ ผู้ซื้อควรได้รับข้อมูลที่เกี่ยวข้องล่าสุดเกี่ยวกับผลิตภัณฑ์ของ ST ก่อนทำการสั่งซื้อ ผลิตภัณฑ์ของ ST จำหน่ายตามข้อกำหนดและเงื่อนไขการขายของ ST ณ เวลาที่รับทราบคำสั่งซื้อ ผู้ซื้อมีหน้าที่รับผิดชอบแต่เพียงผู้เดียวในการเลือก การเลือก และการใช้ผลิตภัณฑ์ของ ST และ ST จะไม่รับผิดชอบใดๆ ต่อความช่วยเหลือในการใช้งานหรือการออกแบบผลิตภัณฑ์ของผู้ซื้อ
ประกาศสำคัญ - โปรดอ่านอย่างละเอียด
ST ไม่อนุญาตให้มีใบอนุญาตใดๆ ไม่ว่าโดยชัดแจ้งหรือโดยนัยในสิทธิในทรัพย์สินทางปัญญาใดๆ
การขายต่อผลิตภัณฑ์ ST ที่มีข้อกำหนดแตกต่างจากข้อมูลที่กำหนดไว้ในที่นี้ จะทำให้การรับประกันใดๆ ที่ ST ให้ไว้สำหรับผลิตภัณฑ์ดังกล่าวเป็นโมฆะ
ST และโลโก้ ST เป็นเครื่องหมายการค้าของ ST สำหรับข้อมูลเพิ่มเติมเกี่ยวกับเครื่องหมายการค้า ST โปรดดูที่ www.st.com/trademarksชื่อผลิตภัณฑ์หรือบริการอื่น ๆ ทั้งหมดเป็นทรัพย์สินของเจ้าของที่เกี่ยวข้อง
ข้อมูลในเอกสารฉบับนี้แทนที่และเปลี่ยนแทนข้อมูลที่เคยให้ไว้ก่อนหน้านี้ในเอกสารฉบับก่อนหน้าใดๆ
© 2021 STMicroelectronics – สงวนลิขสิทธิ์
เอกสาร / แหล่งข้อมูล
 |
ST UM2154 STEVAL-SPIN3201 คอนโทรลเลอร์ BLDC ขั้นสูงพร้อมบอร์ดประเมินผล STM32 MCU แบบฝัง [พีดีเอฟ] คู่มือการใช้งาน UM2154, STEVAL-SPIN3201 Advanced BLDC Controller พร้อม Embedded STM32 MCU Evaluation Board |



