![]() vita. aumentata
vita. aumentata
UM2154
Manuale d'uso
STEVE-SPIN3201: controller BLDC avanzato con scheda di valutazione MCU STM32 integrata
Introduzione
La scheda STEVAL-SPIN3201 è una scheda driver per motore CC senza spazzole trifase basata su STSPIN3F32, un controller trifase con un MCU STM0 integrato e implementa resistori a 3 shunt come topologia di lettura della corrente.
Fornisce una soluzione di facile utilizzo per la valutazione del dispositivo in diverse applicazioni come elettrodomestici, ventilatori, droni e utensili elettrici.
La scheda è progettata per l'algoritmo di controllo orientato al campo con sensori o senza sensori con rilevamento a 3 shunt.
Figura 1. Scheda di valutazione STEVE-SPIN3201

Requisiti hardware e software
L'utilizzo della scheda di valutazione STEVAL-SPIN3201 richiede il seguente software e hardware:
- Un PC Windows ® (XP, Vista 7, Windows 8, Windows 10) per installare il pacchetto software
- Un cavo USB mini-B per collegare la scheda STEVAL-SPIN3201 al PC
- Il kit di sviluppo software di controllo motore STM32 Rev Y (X-CUBE-MCSDK-Y)
- Un motore DC brushless trifase con un vol . compatibiletagee valutazioni attuali
- Un alimentatore CC esterno.
Iniziare
I voti massimi del consiglio sono i seguenti:
- Potenza stage rifornimento voltage (VS) da 8 V a 45 V
- Corrente di fase del motore fino a 15 Arms
Per iniziare il tuo progetto con la lavagna:
Fare un passo 1. Controllare la posizione del ponticello in base alla configurazione di destinazione (vedi Sezione 4.3 Rilevamento sovracorrente
Fare un passo 2. Collegare il motore al connettore J3 facendo attenzione alla sequenza delle fasi del motore.
Fare un passo 3. Alimentare la scheda tramite gli ingressi 1 e 2 del connettore J2. Il LED DL1 (rosso) si accenderà.
Fare un passo 4. Sviluppa la tua applicazione utilizzando il kit di sviluppo software di controllo motore STM32 Rev Y (X-CUBEMCSDK-Y).
Descrizione e configurazione dell'hardware
Figura 2. Componenti principali e posizioni dei connettori mostrano la posizione dei componenti principali e dei connettori sulla scheda.
Figura 2. Componenti principali e posizioni dei connettori

Tabella 1. I ponticelli di impostazione hardware forniscono la piedinatura dettagliata dei connettori.
Tabella 1. Ponticelli di impostazione hardware
| Maglione | Configurazioni consentite | Condizione predefinita |
| Italiano: JP1 | Selezione del VREG collegato al motore V | APRIRE |
| Italiano: JP2 | Selezione alimentazione motore collegata all'alimentazione CC | CHIUSO |
| Italiano: JP3 | Alimentazione encoder Selection Hall ad alimentazione USB (1) / VDD (3) | 1 – 2 CHIUSO |
| Italiano: JP4 | Reset della selezione di ST-LINK (U4) | APRIRE |
| Italiano: JP5 | Selezione PA2 collegata al Padiglione 3 | CHIUSO |
| Italiano: JP6 | Selezione PA1 collegata al Padiglione 2 | CHIUSO |
| Italiano: JP7 | Selezione PA0 collegata al Padiglione 1 | CHIUSO |
Tabella 2. Descrizione di altri connettori, ponticelli e punti di prova
|
Nome |
Spillo | Etichetta |
Descrizione |
| J1 | 1 – 2 | J1 | Alimentazione motore |
| J2 | 1 – 2 | J2 | Alimentazione principale del dispositivo (VM) |
| J3 | 1 – 2 – 3 | U, V, W | Collegamento fasi motore BLDC trifase |
| J4 | 1 – 2 – 3 | J4 | Connettore sensori Hall/encoder |
| 4 – 5 | J4 | Alimentazione sensori Hall/encoder | |
| J5 | – | J5 | Ingresso USB ST-LINK |
| J6 | 1 | 3V3 | Alimentazione ST-LINK |
| 2 | Orologio | SWCLK di ST-LINK | |
| 3 | Terra | Terra | |
| 4 | DIO | SWDIO di ST-LINK | |
| J7 | 1 – 2 | J7 | CARRELLO |
| J8 | 1 – 2 | J8 | Ripristino ST-LINK |
| TP1 | – | GREG | 12V voltage uscita del regolatore |
| TP2 | – | Terra | Terra |
| TP3 | – | VDD | VDD |
| TP4 | – | VELOCITÀ | Uscita potenziometro velocità |
| TP5 | – | PA3 | PA3 GPIO (uscita op-amp senso 1) |
| TP6 | – | V-BUS | Feedback VBus |
| TP7 | – | OUT_U | Uscita U |
| TP8 | – | PA4 | PA4 GPIO (uscita op-amp senso 2) |
| TP9 | – | PA5 | PA5 GPIO (uscita op-amp senso 3) |
| TP10 | – | Terra | Terra |
| TP11 | – | OUT_V | Uscita V |
| TP12 | – | PA7 | PA7_3FG |
| TP13 | – | FUORI_W | Uscita W |
| TP14 | – | 3V3 | COLLEGAMENTO ST 3V3 |
| TP15 | – | 5V | volume USBtage |
| TP16 | – | Entrata/uscita | SWD_IO |
| TP17 | – | Orologio | SWD_CLK |
Descrizione del circuito
STEVAL-SPIN3201 fornisce una soluzione FOC completa a 3 shunt composta da un STSPIN32F0 - controller BLDC avanzato con un MCU STM32 integrato - e un triplo mezzo ponte di alimentazione stage con NMOS STD140N6F7.
Lo STSPIN32F0 genera autonomamente tutta la fornitura richiesta voltages: il convertitore buck DC/DC interno fornisce 3V3 e un regolatore lineare interno fornisce 12 V per i gate driver.
Il condizionamento del segnale di retroazione di corrente viene eseguito attraverso tre degli operativi amplificatori incorporati nel dispositivo e un comparatore interno esegue la protezione da sovracorrente dai resistori di shunt.
Sono disponibili due pulsanti utente, due LED e un trimmer per implementare semplici interfacce utente (ad esempio, avvio/arresto del motore e impostazione della velocità target).
La scheda STEVAL-SPIN3201 supporta l'encoder in quadratura e i sensori Hall digitali come feedback della posizione del motore.
La scheda include un ST-LINK-V2 che consente all'utente di eseguire il debug e scaricare il firmware senza alcuno strumento hardware aggiuntivo.
4.1 Sensore velocità motore Hall/encoder
La scheda di valutazione STEVAL-SPIN3201 supporta i sensori digitali Hall e encoder in quadratura come feedback della posizione del motore.
I sensori possono essere collegati al STSPIN32F0 tramite il connettore J4 è elencato in
Tabella 3. Connettore Hall/encoder (J4).
| Nome | Spillo | Descrizione |
| Padiglione1/A+ | 1 | Sensore di Hall 1/uscita encoder A+ |
| Padiglione2/B+ | 2 | Sonda Hall 2/uscita encoder B+ |
| Padiglione3/Z+ | 3 | Sensore Hall 3/encoder zero feedback |
| Sensore VDD | 4 | Alimentazione sensore voltage |
| Terra | 5 | Terra |
Un resistore in serie di protezione da 1 kΩ è montato in serie con uscite sensore.
Per i sensori che richiedono un pull-up esterno, tre resistori da 10 kΩ sono già montati sulle linee di uscita e collegati al VDD voltage. Sulla stessa linea è disponibile anche un footprint per resistori pull-down.
Il jumper JP3 seleziona l'alimentazione per l'alimentazione del sensore voltage:
- Ponticello tra il pin 1 – pin 2: sensori di Hall alimentati da VUSB (5 V)
- Ponticello tra il pin 1 – pin 2: sensori di Hall alimentati da VDD (3.3 V)
L'utente può scollegare le uscite del sensore dai jumper di apertura JP5, JP6 e JP7 della MCU GPIO.
4.2 Rilevamento della corrente
Nella scheda STEVAL-SPIN3201, il condizionamento del segnale di rilevamento della corrente viene eseguito attraverso tre delle operazioni amplificatori incorporati nel dispositivo STSPIN32F0.
In una tipica applicazione FOC, le correnti nei tre semiponti vengono rilevate utilizzando un resistore di shunt sulla sorgente di ciascun interruttore di alimentazione lato basso. Il senso voltagI segnali vengono forniti a un convertitore analogico-digitale per eseguire il calcolo della matrice relativo a una determinata tecnica di controllo. Questi segnali sensoriali sono generalmente spostati e amplificato da un op-amps per sfruttare l'intera gamma dell'ADC (fare riferimento alla Figura 3. Schema di rilevamento della corrente esample).
Figura 3. Schema di rilevamento della corrente example

I segnali di rilevamento devono essere spostati e centrati su VDD/2 voltage (circa 1.65 V) e amplificato di nuovo che fornisce la corrispondenza tra il valore massimo del segnale rilevato e la gamma di fondo scala dell'ADC.
il volumetage spostamento stage introduce l'attenuazione (1/Gp) del segnale di retroazione che, insieme al guadagno della configurazione non invertente (Gn, fissata da Rn e Rf), contribuisce al guadagno complessivo (G). Come già accennato, l'obiettivo è stabilire il complessivo ampguadagno della rete di lificazione (G) in modo che il volumetage sulla resistenza di shunt corrispondente alla corrente massima consentita del motore (ISmax valore di picco della corrente nominale del motore) si adatta al range di voltagè leggibile dall'ADC.

Nota che, una volta fissato G, è meglio configurarlo abbassando il più possibile l'attenuazione iniziale 1/Gp e, quindi, il guadagno Gn. Questo è importante non solo per massimizzare il segnale in base al rapporto di rumore, ma anche per ridurre l'effetto dell'op-amp offset intrinseco sull'uscita (proporzionale a Gn).
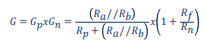
Il guadagno e la polarizzazione voltage (VOPout, pol) determina l'intervallo operativo del circuito di rilevamento della corrente:
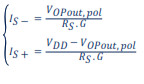 Dove:
Dove:
- IS- = corrente massima erogata
- IS+ = massima corrente assorbita che può essere rilevata dal circuito.
Tabella 4. STEVE-SPIN3201 op-amps rete di polarizzazione
|
Parametro |
Riferimento parte | Riv. 1 |
Riv. 3 |
| Rp | R14, R24, R33 | 560 Ohm | 1.78 kΩ |
| Ra | R12, R20, R29 | 8.2 kΩ | 27.4 kΩ |
| Rb | R15, R25, R34 | 560 Ohm | 27.4 kΩ |
| Rn | R13, R21, R30 | 1 kΩ | 1.78 kΩ |
| Rf | R9, R19, R28 | 15 kΩ | 13.7 kΩ |
| Cf | C15, C19, C20 | 100 pF | Nuovo Messico |
| G | – | 7.74 | 7.70 |
| VOPout, pol | – | 1.74 Volt | 1.65 Volt |
4.3 Rilevamento sovracorrente
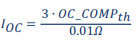
La scheda di valutazione STEVAL-SPIN3201 implementa la protezione da sovracorrente basata sul comparatore OC integrato STSPIN32F0. I resistori di shunt misurano la corrente di carico di ciascuna fase. I resistori R50, R51 e R52 portano il voltagi segnali associati a ciascuna corrente di carico al pin OC_COMP. Quando la corrente di picco che scorre in una delle tre fasi supera la soglia selezionata, il comparatore integrato viene attivato e tutti gli interruttori di potenza high side vengono disabilitati. Gli interruttori di potenza high-side vengono nuovamente abilitati quando la corrente scende al di sotto della soglia, implementando così la protezione da sovracorrente.
Le soglie attuali per la scheda di valutazione STEVAL-SPIN3201 sono elencate in
Tabella 5. Soglie di sovracorrente.
| PF6 | PF7 | Compr. interno soglia | Soglia OC |
| 0 | 1 | 100 mV | 20 A |
| 1 | 0 | 250 mV | 65 A |
| 1 | 1 | 500 mV | 140 A |
Queste soglie possono essere modificate cambiando il resistore di polarizzazione R43. Si consiglia di scegliere R43 superiore a 30 kΩ. Per calcolare il valore di R43 per un limite di corrente target IOC, è possibile utilizzare la seguente formula:

dove OC_COMPth è il volumetage soglia del comparatore interno (selezionata da PF6 e PF7), e VDD è l'alimentazione digitale di 3.3 V voltage fornito dal convertitore buck DCDC interno.
Rimuovendo l'R43, la formula della soglia corrente è semplificata come segue:
4.4 Volume bustage circuito
La scheda di valutazione STEVAL-SPIN3201 fornisce il bus voltage rilevamento. Questo segnale viene inviato attraverso un voltage divisore dall'alimentazione del motore voltage (VBUS) (R10 e R16) e inviato al GPIO PB1 (canale 9 dell'ADC) dell'MCU embedded. Il segnale è disponibile anche sul TP6.
4.5 Interfaccia utente hardware
La scheda include i seguenti elementi dell'interfaccia utente hardware:
- Potenziometro R6: imposta la velocità target, ad esample
- Switch SW1: ripristina STSPIN32F0 MCU e ST-LINK V2
- Switch SW2: pulsante utente 1
- Switch SW3: pulsante utente 2
- LED DL3: LED utente 1 (si accende anche alla pressione del pulsante utente 1)
- LED DL4: LED utente 2 (si accende anche quando vengono premuti i pulsanti utente 2)
4.6 Debug
La scheda di valutazione STEVAL-SPIN3201 incorpora un debugger/programmatore ST-LINK/V2-1. Le funzioni supportate su ST-LINK sono:
- Rienumerazione software USB
- Interfaccia della porta com virtuale su USB collegata ai pin PB6/PB7 di STSPIN32F0 (UART1)
- Interfaccia di archiviazione di massa su USB
L'alimentazione per ST-LINK è fornita dal PC host tramite il cavo USB collegato al J5.
Il LED LD2 fornisce informazioni sullo stato della comunicazione ST-LINK: - LED rosso che lampeggia lentamente: all'accensione prima dell'inizializzazione USB
- LED rosso lampeggiante veloce: dopo la prima corretta comunicazione tra il PC e ST-LINK/V2-1 (enumerazione)
- LED rosso acceso: l'inizializzazione tra il PC e ST-LINK/V2-1 è completata
- LED verde acceso: inizializzazione della comunicazione di destinazione riuscita
- LED rosso/verde lampeggiante: durante la comunicazione con il target
- Verde acceso: comunicazione terminata e riuscita
La funzione di reset viene disconnessa dall'ST-LINK rimuovendo il jumper J8.
Cronologia delle revisioni
Tabella 6. Cronologia delle revisioni del documento
| Data | Revisione | Cambiamenti |
| 12-dic-20161 | 1 | Versione iniziale. |
| 23-nov-2017 | 2 | Aggiunta la Sezione 4.2: Rilevamento della corrente a pagina 7. |
| 27-feb-2018 | 3 | Piccole modifiche in tutto il documento. |
| 18-ago-2021 | 4 | Piccola correzione del modello. |
STMicroelectronics NV e le sue sussidiarie ("ST") si riservano il diritto di apportare modifiche, correzioni, miglioramenti, modifiche e miglioramenti ai prodotti ST e/oa questo documento in qualsiasi momento senza preavviso. Gli acquirenti devono ottenere le ultime informazioni pertinenti sui prodotti ST prima di effettuare ordini. I prodotti ST sono venduti in base ai termini e alle condizioni di vendita di ST in vigore al momento della conferma dell'ordine. Gli acquirenti sono gli unici responsabili per la scelta, la selezione e l'uso dei prodotti ST e la ST non si assume alcuna responsabilità per l'assistenza applicativa o la progettazione dei prodotti degli acquirenti.
AVVISO IMPORTANTE - LEGGERE ATTENTAMENTE
Nel presente documento ST non concede alcuna licenza, espressa o implicita, su alcun diritto di proprietà intellettuale.
La rivendita di prodotti ST con disposizioni diverse dalle informazioni qui stabilite invaliderà qualsiasi garanzia concessa da ST per tale prodotto.
ST e il logo ST sono marchi di ST. Per ulteriori informazioni sui marchi ST, fare riferimento a www.st.com/trademarksTutti gli altri nomi di prodotti o servizi sono di proprietà dei rispettivi proprietari.
Le informazioni contenute nel presente documento annullano e sostituiscono le informazioni fornite in precedenza in qualsiasi versione precedente del documento.
© 2021 STMicroelectronics – Tutti i diritti riservati
Documenti / Risorse
 |
ST UM2154 STEVAL-SPIN3201 Controller BLDC avanzato con scheda di valutazione MCU STM32 incorporata [pdf] Manuale d'uso UM2154, STEVAL-SPIN3201 Controller BLDC avanzato con scheda di valutazione MCU STM32 incorporata |



