![]()
T60-IO Ditutup Loop Stepper Driver
Manual pangguna
Shenzhen Rtelligent Mechanical Electrical Technology Co.,ltd
Produk liwatview
Matur nuwun kanggo milih driver servo stepper digital seri Rtelligent T. Stepper servo minangka skema motor stepper sing dibentuk adhedhasar motor stepper loop mbukak umum sing dikombinasikake karo umpan balik posisi lan algoritma servo, sing nduweni kecepatan dhuwur, torsi dhuwur, presisi dhuwur, getaran sing kurang, kurang panas lan ora ana langkah sing ilang.
Adhedhasar platform chip pangolahan DSP 32-dicokot anyar TI, driver servo stepper seri T nggunakake kontrol berorientasi lapangan (FOC) lan algoritma kontrol lemah vektor ing driver servo, sing nduweni kinerja ngluwihi stepper biasa ing kabeh aspek.
- Fungsi pangaturan parameter PID sing dibangun ndadekake motor luwih cocog karo macem-macem jinis beban.
- Algoritma kontrol lemah sing dibangun ing lapangan ndadekake motor nyuda karakteristik medan magnet lan njaga daya kanthi cepet.
- Fungsi kontrol vektor sing dibangun ing saiki ndadekake motor nduweni karakteristik servo saiki lan kurang panas.
- Algoritma printah mikro-langkah sing dibangun ing nggawe motor bisa mlaku nalika njaga getaran sing stabil lan sithik ing macem-macem kecepatan.
- Umpan balik encoder kanthi resolusi pulsa 4000 sing dibangun nggawe presisi posisi mundhak lan ora bakal ilang langkah kasebut.
Kesimpulane, skema kontrol servo sing digabungake karo karakteristik motor stepper mbisakake driver servo stepper seri T supaya luwih bisa nindakake kinerja motor stepper, sing bisa ngganti aplikasi servo kanthi daya sing padha. Iku pilihan anyar saka kinerja biaya optimal kanggo peralatan otomatis.
T60-IO driver bisa nyetel bagean lan paramèter liyane liwat DIP switch lan piranti lunak debugging. Wis fungsi pangayoman kayata voltage, saiki lan posisi, lan nambah antarmuka output weker. Sinyal kontrol input lan output diisolasi kanthi optik.
| sumber daya | 24 – 50 VDC |
| Kontrol presisi | 4000 Pulse / r |
| Kontrol saiki | Algoritma kontrol vektor servo |
| Setelan kacepetan | Setelan switch DIP, utawa setelan piranti lunak debugging |
| Range kacepetan | Konvensional 1200 ~ 1500rpm, nganti 4000rpm |
| Resonansi dipatèni | Ngetung titik resonansi kanthi otomatis lan nyandhet getaran IF |
| Pangaturan parameter PID | Piranti lunak tes kanggo nyetel karakteristik PID motor |
| Nyaring pulsa | Filter sinyal digital 2MHz |
| Output weker | Output weker saka over-current, over-voltage, kesalahan posisi, lsp |
Muga-muga produk kita kanthi kinerja sing apik bisa mbantu ngrampungake program kontrol olahraga kanthi sukses. Waca manual teknis iki sadurunge nggunakake produk.
Lingkungan aplikasi lan instalasi
Syarat lingkungan
| Item | Rtelligent T60-IO |
| Lingkungan instalasi | Ngindhari bledug, lenga, lan lingkungan korosif |
| Getaran | 0.5G(4.9m/s2) Maks |
| Suhu operasi / asor | 0 ℃ ~ 45 ℃ / 90% RH utawa kurang (ora ana kondensasi) |
| Suhu panyimpenan lan transportasi: | -10 ℃ ~ 70 ℃ |
| adhem | Pendinginan alami / adoh saka sumber panas |
| Kelas anti banyu | IP54 |
dimensi instalasi driver

syarat instalasi driver
Pasang driver kanthi vertikal utawa horisontal, kanthi ngarep madhep maju, ndhuwur madhep munggah kanggo nggampangake cooling.
Sajrone perakitan, supaya pengeboran lan prakara manca liyane tiba ing driver.
Sajrone perakitan, gunakake sekrup M3 kanggo ndandani.
Yen ana sumber geter (kayata pengebor) cedhak karo posisi instalasi, gunakake penyerap geter utawa gasket karet sing tahan getaran.
Nalika sawetara pembalap diinstal ing kabinèt kontrol, please mbayar manungsa waé kanggo cadangan cukup papan kanggo boros panas cekap. Yen perlu, sampeyan bisa ngatur penggemar cooling kanggo mesthekake kondisi boros panas apik ing kabinèt kontrol.
port driver lan sambungan
Katrangan fungsi port
| Fungsi | sasmita | definisi | pangandikan |
| Input sumber daya | V+ | Input menyang kutub positif saka sumber daya DC | DC 24-50y |
| V- | Input menyang kutub negatif saka sumber daya DC | ||
| Sambungan motor | A+ | terminal positif saka phase-A nduwurke tumpukan | abang |
| terminal negatif saka phase-A nduwurke tumpukan | kuning | ||
| B+ | Terminal positif belitan fase-B | ireng | |
| B- | terminal negatif saka phase-B nduwurke tumpukan | Ijo | |
| Sambungan encoder | EB+ | Terminal positif fase Encoder B | Ijo |
| EB- | Terminal negatif saka Encoder phase B | kuning | |
| EA+ | Terminal positif saka Encoder phase A | coklat | |
| EA- | Terminal negatif saka Encoder phase A | Putih | |
| VCC | Encoder daya kerja 5V positif | abang | |
| GND | Encoder daya kerja 5V ground terminal | Biru | |
| 10 sambungan | PUL+ | antarmuka input Stan | tingkat 24 V |
| PUL- | |||
| DIR+ | Antarmuka input arah | ||
| DIR- | |||
| Aktifake terminal | ENA+ | Aktifake antarmuka kontrol | |
| ENA- | |||
| Output weker | ALM+ | Antarmuka output weker | 24V, ngisor 40mA |
| ALM- |
Input sumber daya
Sumber daya saka driver punika daya DC, lan vol inputtage kisaran antarane 24V ~ 50V.
Aja salah nyambungake listrik 220VAC langsung menyang ujung AC! ! !
Referensi pilihan daya:
Voltage:
Motor stepper nduweni karakteristik nyuda torsi kanthi nambah kecepatan motor, lan vol inputtage bakal mengaruhi amplitude nyuda torsi kacepetan dhuwur. Bener nambah voltage saka sumber daya input bisa nambah torsi output saka motor ing kacepetan dhuwur.
Stepper servo nduweni kecepatan lan output torsi sing luwih dhuwur tinimbang stepper biasa. Mulane, yen sampeyan pengin entuk kinerja kacepetan dhuwur sing luwih apik, sampeyan kudu nambah volume sumber dayatage saka sopir.
saiki:
Proses kerja driver kanggo ngowahi input dhuwur-voltage lan sumber daya kurang-saiki menyang low-voltage lan dhuwur-saiki ing loro ends saka motor nduwurke tumpukan. Ing panggunaan nyata, sumber daya sing cocog kudu dipilih miturut model motor, torsi beban lan faktor liyane.
Efek saka regenerasi voltage:
Nalika motor stepper digunakake, uga nahan karakteristik generator. Nalika decelerating, energi kinetik akumulasi dening mbukak bakal diowahi dadi energi listrik lan superimposed ing sirkuit driver lan sumber daya input.
Pay manungsa waé menyang setelan akselerasi lan wektu deceleration kanggo nglindhungi driver utawa sumber daya.
Nalika pembalap dipateni, sampeyan bakal weruh indikator LED driver nalika beban ditarik kanggo nggawe pamindhahan motor, sing uga kena pengaruh iki.
Sambungan encoder
T60-IO encoder punika A / B output diferensial lan disambungake ing urutan sing cocog nalika digunakake.
| EB+ | EB- | EA+ | EA- | VCC | GND |
| Ijo | kuning | coklat | Putih | abang | Biru |
Rtelligent dilengkapi kabel encoder dawa tartamtu, Mangga tuku kabel ekstensi sing beda-beda miturut kabutuhan instalasi.
Sambungan motor
Motor sing cocog karo driver T60-IO yaiku motor servo stepper seri T sing cocog, lan urutan sambungan motor sing cocog tetep lan unik.

| A+ | abang |
| A- | kuning |
| B+ | ireng |
| B- | Ijo |
Sambungan sinyal kontrol
PUL, DIR Port: sambungan kanggo miwiti lan mungkasi printah
| Indikasi wiwitan lan arah | 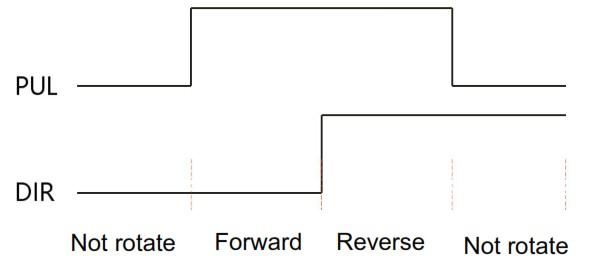 |
| 1. Ing PUL lan DIR mati, motor wis micu kanggo muter maju. Nalika PUL dipateni, motor decelerates lan mandheg. 2. Ing PUL lan DIR ing, motor wis micu kanggo muter mbalikke.Nalika PUL dipateni, motor decelerates lan mandheg. 3. Nalika PUL mati, motor mandheg. |
Port ENA: ngaktifake / mateni
Nalika optocoupler internal mati, driver output saiki kanggo motor;
Nalika optocoupler internal urip, pembalap bakal Cut mati saiki saben phase saka motor kanggo nggawe motor free, lan pulsa langkah ora bakal nanggapi.
Nalika motor ana ing negara kesalahan, iku otomatis dipateni. Logika tingkat saka sinyal ngaktifake bisa disetel kanggo ngelawan.
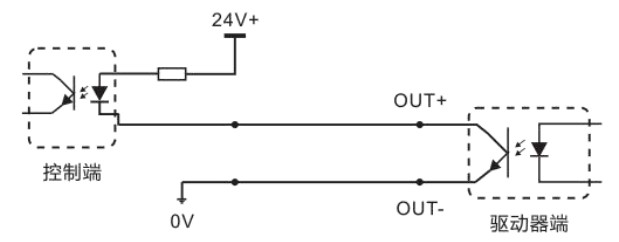
ALM port: digunakake kanggo weker lan rawuh output.
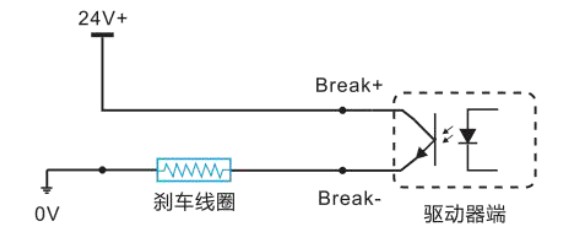
Port ALM digunakake kanggo output status operasi driver menyang sirkuit kontrol external. Nalika driver ana ing negara kesalahan lan negara kerja normal, ALM ngasilake tingkat optocoupler sing beda. Kajaba iku, ALM bisa digunakake maneh minangka sinyal kontrol rem (break) liwat imbuhan piranti lunak, sing digunakake kanggo ngontrol saklar rem motor servo stepper kanthi rem. Wiwit coil brake minangka beban induktif, lan pemanasan coil serius nalika motor mlaku, pelanggan bisa milih pengontrol rem khusus miturut kabutuhan kanggo nyuda pemanasan rem lan nambah urip lan linuwih.
 Rtelligent menehi solusi kanggo pengontrol rem khusus, examples minangka nderek:
Rtelligent menehi solusi kanggo pengontrol rem khusus, examples minangka nderek:
Port serial RS232

| S/N | Simbol | Katrangan |
| 1 | NC | |
| 2 | +5V | Terminal sumber daya positif |
| 3 | TxD | Terminal transmisi RS232 |
| 4 | GND | Terminal lemah sumber daya |
| 5 | RxD | Terminal panampa RS232 |
| 6 | NC |
Setelan switch DIP lan paramèter operasi

SW6, SW7 ora ditetepake.
Setelan kacepetan
| Kacepetan | SW1 | SW2 | SW3 | SW4 | pangandikan |
| 100 | on | on | on | on | Kacepetan liyane bisa disesuaikan |
| 150 | mati | on | on | on | |
| 200 | on | mati | on | on | |
| 250 | mati | mati | on | on | |
| 300 | on | on | mati | on | |
| 400 | mati | on | mati | on | |
| 500 | on | mati | mati | on | |
| 600 | mati | mati | mati | on | |
| 700 | on | on | on | mati | |
| 800 | mati | on | on | mati | |
| 900 | on | mati | on | mati | |
| 1000 | mati | mati | on | mati | |
| 1100 | on | on | mati | mati | |
| 1200 | mati | on | mati | mati | |
| 1300 | on | mati | mati | mati | |
| 1400 | mati | mati | mati | mati |
Pilihan arah motor
DIP SW5 digunakake kanggo nyetel arah mlaku motor ing pulsa awal. Ing "mati" tegese arah motor counterclockwise nalika inputting pulsa dhisikan; Ing "on" tegese arah motor searah jarum jam nalika input pulsa awal.
• Pulsa awal yaiku pulsa tes sing digunakake nalika ngembangake piranti lunak driver; Mangga deleng arah mlaku motor.
Pilihan open/closed loop
DIP SW8 digunakake kanggo nyetel mode kontrol driver.
"Mati" tegese mode kontrol loop tertutup;
Ing "on" tegese mode kontrol mbukak-loop lan bisa digunakake kanggo nyoba motor.
Indikasi LED status kerja driver
| status LED | Status driver | |
| Indikator ijo urip kanggo dangu | Driver ora diaktifake | |
| Indikator ijo kerlip | Driver kerja normal | |
| Siji indikator ijo lan siji indikator abang | Driver overcurrent | |
| Siji indikator ijo lan loro indikator abang | Daya input driver overvoltage | |
| Siji indikator ijo lan telung indikator abang | internal voltage saka sopir iku salah | |
| Siji indikator ijo lan papat abang | Kesalahan nelusuri ngluwihi watesan | |
| Siji ijo lan limang indikator abang | Encoder phase kesalahan | |
Kesalahan umum lan ngatasi masalah
| Fenomena | Kahanan sing bisa ditindakake | Solusi |
| Motor ora bisa | Indikator daya dipateni | Priksa sirkuit sumber daya kanggo sumber daya normal |
| Rotor motor dikunci nanging motor ora bisa digunakake | Sinyal pulsa lemah; nambah saiki sinyal kanggo 7-16mA | |
| Kacepetan alon banget | Pilih micro-stepping tengen | |
| Driver dilindhungi | Ngatasi weker lan daya maneh | |
| Ngaktifake masalah sinyal | Narik munggah utawa pedhot sambungan sinyal aktif | |
| Pulsa printah ora bener | Priksa manawa komputer ndhuwur duwe output pulsa | |
| Setir motor salah | Arah puteran motor malik | Nyetel DIP SW5 |
| Kabel motor dicopot | Priksa sambungan | |
| Motor mung siji arah | Kesalahan mode pulsa utawa port DIR rusak | |
| Indikator weker urip | Sambungan motor salah | Priksa sambungan motor |
| Sambungan motor lan sambungan encoder salah | Priksa urutan sambungan encoder | |
| Voltage dhuwur banget utawa kurang banget | Priksa sumber daya | |
| Posisi utawa kacepetan salah | Sinyal kaganggu | Ngilangi gangguan kanggo grounding dipercaya |
| Input printah ora bener | Priksa instruksi komputer ndhuwur kanggo mesthekake yen output bener | |
| Setelan Pulse saben revolusi salah | Priksa status switch DIP lan sambungake switch kanthi bener | |
| Sinyal encoder ora normal | Ganti motor lan hubungi pabrikan | |
| Terminal driver | Short circuit antarane terminal | Priksa polaritas daya utawa sirkuit cendhak eksternal |
| kobong munggah | Resistance internal antarane terminal gedhe banget | Priksa manawa ana werni solder amarga tambahan solder ing sambungan kabel |
| Motor wis metu saka toleransi | Wektu akselerasi lan akselerasi cendhak banget | Ngurangi akselerasi printah utawa nambah paramèter nyaring driver |
| Torsi motor kurang banget | Pilih motor kanthi torsi dhuwur | |
| Bebane abot banget | Priksa bobot lan kualitas beban lan atur struktur mekanik | |
| Saiki sumber daya kurang banget | Ganti sumber daya sing cocog |
Lampiran A. Klausa Jaminan
A.1 Periode babar pisan: 12 sasi
Kita nyedhiyakake jaminan kualitas sajrone setaun wiwit tanggal pangiriman lan layanan pangopènan gratis kanggo produk kita sajrone periode garansi.
A.2 Ora kalebu ing ngisor iki:
- Sambungan sing ora bener, kayata polaritas sumber daya dibalik lan masang / narik sambungan motor nalika sumber daya disambungake.
- Ngluwihi syarat listrik lan lingkungan.
- Ngganti piranti internal tanpa ijin.
A.3 Proses pangopènan
Kanggo pangopènan produk, tindakake prosedur ing ngisor iki:
- Hubungi staf layanan pelanggan kanggo njaluk ijin rework.
- Dokumen ditulis babagan fenomena kegagalan driver ditempelake ing barang, uga informasi kontak lan cara mailing saka pangirim.
Alamat layang:
Kode pos:
Telp.:
szruitech.com
Dokumen / Sumber Daya
 |
RTELLIGENT T60-IO Ditutup Loop Stepper Driver [pdf] Manual pangguna T60-IO, Ditutup Loop Stepper Driver, T60-IO Ditutup Loop Stepper Driver |



