![]()
T60-IO Closed Loop Stepper Driver
Manwal sa Gumagamit
Shenzhen Rtelligent Mechanical Electrical Technology Co.,ltd
Natapos ang produktoview
Salamat sa pagpili sa Rtelligent T series digital stepper servo driver. Ang stepper servo usa ka stepper motor scheme nga naporma base sa komon nga open loop stepper motor inubanan sa position feedback ug servo algorithm, nga nagpakita sa high speed, high torque, high precision, low vibration, low heating ug walay pagkawala sa lakang.
Base sa bag-ong 32-bit nga DSP processing chip platform sa TI, ang T series nga stepper servo driver naggamit sa field oriented control (FOC) ug vector field-weakening control algorithm sa servo driver, nga adunay performance nga milabaw sa ordinaryo nga stepper sa tanang aspeto.
- Ang built-in nga PID parameter adjustment function naghimo sa motor nga mas makatagbo sa paggamit sa lain-laing mga matang sa load.
- Ang built-in nga field-weakening control algorithm naghimo sa motor nga makunhuran ang mga kinaiya sa magnetic field ug ipadayon ang gahum sa taas nga tulin.
- Ang built-in nga kasamtangan nga vector control function naghimo sa motor nga adunay kasamtangan nga kinaiya sa servo ug ubos nga pagpainit.
- Ang built-in nga micro-stepping command algorithm naghimo sa motor nga makadagan samtang nagmintinar sa usa ka lig-on ug ubos nga vibration sa lain-laing mga katulin.
- Ang feedback sa encoder nga adunay built-in nga 4000 nga resolusyon sa pulso naghimo sa pagpataas sa katukma sa pagposisyon ug dili mawala ang lakang.
Sa konklusyon, ang servo control scheme inubanan sa mga kinaiya sa stepper motor makapahimo sa T series nga stepper servo driver nga mas maayo nga magamit ang performance sa stepper motor, nga makapuli sa servo application sa samang gahum. Kini usa ka bag-ong pagpili sa kamahinungdanon nga pasundayag sa gasto alang sa kagamitan sa automation.
Ang drayber sa T60-IO mahimong magbutang sa subdivision ug uban pang mga parameter pinaagi sa DIP switch ug debugging software. Kini adunay mga gimbuhaton sa pagpanalipod sama sa voltage, kasamtangan ug posisyon, ug midugang alarm output interface. Ang mga signal sa pagkontrol sa input ug output niini optically isolated.
| suplay sa kuryente | 24 – 50 VDC |
| Pagkontrol sa katukma | 4000 Pulse/r |
| Pagkontrol karon | Algoritmo sa pagkontrol sa servo vector |
| Mga setting sa tulin | DIP switch setting, o debugging software setting |
| Sakup sa tulin | Kombensyonal nga 1200 ~ 1500rpm, hangtod sa 4000rpm |
| Pagpugong sa resonance | Awtomatikong kalkulado ang resonance point ug pugngan ang IF vibration |
| Pag-adjust sa parameter sa PID | Pagsulay sa software aron ma-adjust ang mga kinaiya sa motor PID |
| Pagsala sa pulso | 2MHz digital signal filter |
| Output sa alarma | Ang output sa alarma sa sobra nga kasamtangan, sobra nga voltage, sayop sa posisyon, ug uban pa |
Kami nanghinaut nga ang among mga produkto nga adunay maayo kaayo nga pasundayag makatabang kanimo nga makompleto ang programa sa pagkontrol sa dula nga malampuson. Palihug basaha kining teknikal nga manwal sa dili pa gamiton ang mga produkto.
Aplikasyon palibot ug pag-instalar
Kinahanglanon sa kinaiyahan
| butang | Rtelligent T60-IO |
| Kalibutan sa pag-instalar | Likayi ang abog, lana, ug makadaot nga palibot |
| Pagkurog | 0.5G(4.9m/s2)Max |
| Operating temperatura/humidity | 0 ℃ ~ 45 ℃ / 90% RH o mas ubos (walay condensation) |
| Pagtipig ug temperatura sa transportasyon: | -10 ℃ ~ 70 ℃ |
| Pagpabugnaw | Natural nga pagpabugnaw / layo sa tinubdan sa kainit |
| Waterproof nga grado | IP54 |
Mga sukat sa pag-install sa drayber

Mga kinahanglanon sa pag-instalar sa drayber
Palihug i-install ang drayber nga patindog o pinahigda, nga ang atubangan nag-atubang sa unahan, ang ibabaw nag-atubang pataas aron mapadali ang pagpabugnaw.
Atol sa asembliya, likayi ang mga drilling ug uban pang langyaw nga butang nga mahulog sa sulod sa drayber.
Atol sa asembliya, palihug gamita ang M3 screw aron ayohon.
Kung adunay gigikanan sa vibration (sama sa driller) nga duol sa posisyon sa pag-install, palihug gamita ang usa ka nagkurog nga absorber o usa ka gasket nga goma nga resistensya sa vibration.
Kung daghang mga drayber ang na-install sa control cabinet, palihug pagtagad sa pagreserba og igo nga luna alang sa igo nga pagwagtang sa kainit. Kung gikinahanglan, mahimo nimong i-configure ang mga cooling fans aron masiguro ang maayo nga mga kondisyon sa pagwagtang sa kainit sa control cabinet.
Driver port ug koneksyon
Deskripsyon sa function sa pantalan
| Kalihokan | Grado | Kahubitan | Mga komento |
| Input sa suplay sa kuryente | V+ | Pag-input sa positibo nga poste sa suplay sa kuryente sa DC | DC 24-50y |
| V- | Pag-input sa negatibo nga poste sa suplay sa kuryente sa DC | ||
| Koneksyon sa motor | A+ | Positibo nga terminal sa phase-A winding | Pula |
| Negatibo nga terminal sa phase-A winding | Dilaw | ||
| B+ | Positibo nga terminal sa phase-B winding | Itom | |
| B- | Negatibo nga terminal sa phase-B winding | Berde | |
| Koneksyon sa encoder | EB+ | Positibo nga terminal sa Encoder phase B | Berde |
| EB- | Negatibo nga terminal sa Encoder phase B | Dilaw | |
| EA+ | Positibo nga terminal sa Encoder phase A | Brown | |
| EA- | Negatibo nga terminal sa Encoder phase A | Puti | |
| VCC | Encoder working power 5V positibo | Pula | |
| GND | Encoder working power 5V ground terminal | Asul | |
| 10 koneksyon | PUL+ | Stan input interface | 24V nga lebel |
| PUL- | |||
| DIR+ | Direksyon input interface | ||
| DIR- | |||
| I-enable ang terminal | ENA+ | I-enable ang control interface | |
| ENA- | |||
| Output sa alarma | ALM+ | Interface sa output sa alarma | 24V, ubos sa 40mA |
| ALM- |
Input sa suplay sa kuryente
Ang suplay sa kuryente sa drayber mao ang DC power, ug ang input voltage range kay tali sa 24V ~ 50V.
Ayaw sayop nga pagkonektar sa mains 220VAC direkta sa duha ka tumoy sa AC! ! !
Reperensya sa pagpili sa gahum:
Voltage:
Stepper motor adunay mga kinaiya sa torque pagkunhod sa pagtaas sa motor speed, ug ang input voltage makaapekto sa amplitude sa high-speed nga pagkunhod sa torque. Husto nga pagdugang sa voltage sa input power supply makadugang sa output torque sa motor sa high speed.
Ang stepper servo adunay mas taas nga tulin ug torque output kay sa ordinaryo nga stepper. Busa, kung gusto nimo nga makakuha og mas maayo nga high-speed nga performance, kinahanglan nimo nga dugangan ang power supply voltage sa driver.
Karon:
Ang proseso sa pagtrabaho sa drayber mao ang pag-convert sa input nga high-voltage ug ubos nga kasamtangan nga suplay sa kuryente ngadto sa ubos nga voltage ug high-current sa duha ka tumoy sa motor winding. Sa aktuwal nga paggamit, ang angay nga suplay sa kuryente kinahanglan mapili sumala sa modelo sa motor, load torque ug uban pang mga hinungdan.
Ang mga epekto sa pagbag-o voltage:
Kung ang stepper motor nagtrabaho, kini usab nagpabilin sa mga kinaiya sa generator. Kung mohinay, ang kinetic energy nga natipon sa load ma-convert sa electrical energy ug ipatong sa driver circuit ug input power supply.
Hatagi'g pagtagad ang setting sa acceleration ug deceleration nga oras aron mapanalipdan ang drayber o suplay sa kuryente.
Kung gipalong ang drayber, makita nimo ang LED indicator sa drayber kung gibira ang karga aron molihok ang motor, nga apektado usab niini.
Koneksyon sa encoder
Ang T60-IO encoder kay A/B differential output ug konektado sa katugbang nga han-ay kon gamiton.
| EB+ | EB- | EA+ | EA- | VCC | GND |
| Berde | Dilaw | Brown | Puti | Pula | Asul |
Ang Rtelligent nasangkapan sa usa ka piho nga gitas-on sa encoder cable, Palihug pagpalit ug extension nga mga kable nga lainlain ang gitas-on sumala sa mga kinahanglanon sa pag-install.
Koneksyon sa motor
Ang katugbang nga motor sa drayber sa T60-IO mao ang katugbang nga T series nga stepper servo motor, ug ang katugbang nga han-ay sa koneksyon sa motor naayo ug talagsaon.

| A+ | Pula |
| A- | Dilaw |
| B+ | Itom |
| B- | Berde |
Pagkontrol sa koneksyon sa signal
PUL, DIR Port: koneksyon alang sa pagsugod ug paghunong sa sugo
| Indikasyon sa pagsugod ug direksyon | 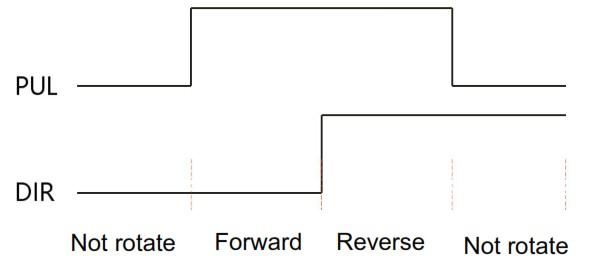 |
| 1. Sa PUL on ug DIR off, ang motor ma-trigger sa pagtuyok sa unahan. Sa dihang ang PUL gipalong, ang motor mohinay ug mohunong. 2. Sa PUL on ug DIR on, ang motor ma-trigger sa pag-rotate balik.Sa dihang ang PUL gipalong, ang motor mohinay ug mohunong. 3. Sa PUL off, ang motor mohunong. |
ENA port: pag-enable/disable
Kung ang internal nga optocoupler wala na, ang drayber nagpagawas sa kasamtangan sa motor;
Sa diha nga ang internal nga optocoupler anaa, ang drayber magputol sa kasamtangan sa matag hugna sa motor aron mahimo ang motor nga libre, ug ang lakang nga pulso dili matubag.
Kung ang motor naa sa kahimtang sa sayup, awtomatiko kini nga gipalong. Ang lebel nga lohika sa makahimo nga signal mahimong itakda sa kaatbang.
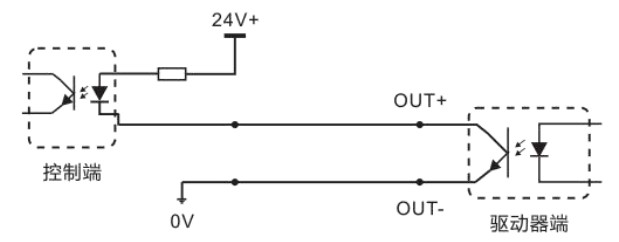
ALM port: gigamit alang sa alarma ug pag-abot output.
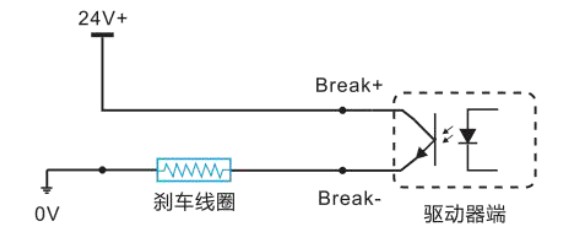
Ang ALM port gigamit sa pag-output sa operating status sa driver ngadto sa external control circuit. Kung ang drayber naa sa kahimtang sa sayup ug ang normal nga kahimtang sa pagtrabaho, ang ALM nagpagawas sa lainlaing lebel sa optocoupler. Dugang pa, ang ALM mahimong magamit pag-usab isip brake control (break) signal pinaagi sa software adjustment, nga gigamit sa pagkontrolar sa brake switch sa stepper servo motor nga adunay brake. Tungod kay ang brake coil usa ka inductive load, ug ang coil heating seryoso kung ang motor nagdagan, ang mga kustomer makapili ug espesyal nga brake controller sumala sa ilang mga panginahanglan aron makunhuran ang pagpainit sa preno ug mapaayo ang kinabuhi ug kasaligan.
 Naghatag ang Rtelligent og mga solusyon alang sa gipahinungod nga mga tigkontrol sa preno, examples mao ang mosunod:
Naghatag ang Rtelligent og mga solusyon alang sa gipahinungod nga mga tigkontrol sa preno, examples mao ang mosunod:
RS232 serial port

| S/N | Simbolo | Deskripsyon |
| 1 | NC | |
| 2 | +5V | Positibo nga terminal sa suplay sa kuryente |
| 3 | TxD | RS232 nga nagpadala sa terminal |
| 4 | GND | Ground terminal sa suplay sa kuryente |
| 5 | RxD | RS232 pagdawat terminal |
| 6 | NC |
Ang setting sa DIP switch ug operating parameters

Ang SW6, SW7 wala gihubit.
Ang setting sa tulin
| Bilis | SW1 | SW2 | SW3 | SW4 | Mga komento |
| 100 | on | on | on | on | Ang ubang mga katulin mahimong ipasibo |
| 150 | off | on | on | on | |
| 200 | on | off | on | on | |
| 250 | off | off | on | on | |
| 300 | on | on | off | on | |
| 400 | off | on | off | on | |
| 500 | on | off | off | on | |
| 600 | off | off | off | on | |
| 700 | on | on | on | off | |
| 800 | off | on | on | off | |
| 900 | on | off | on | off | |
| 1000 | off | off | on | off | |
| 1100 | on | on | off | off | |
| 1200 | off | on | off | off | |
| 1300 | on | off | off | off | |
| 1400 | off | off | off | off |
Pagpili sa direksyon sa motor
Ang DIP SW5 gigamit sa pagtakda sa direksyon sa pagdagan sa motor ubos sa inisyal nga pulso. Ang "off" nagpasabot nga ang direksyon sa motor kay counterclockwise sa pag-input sa inisyal nga pulso; Ang "on" nagpasabot nga ang direksyon sa motor kay clockwise sa pag-input sa inisyal nga pulso.
• Ang inisyal nga pulso mao ang pagsulay nga pulso nga gigamit sa pagpalambo sa software sa drayber; Palihug tan-awa ang aktwal nga direksyon sa pagdagan sa motor.
Pagpili sa bukas/sirado nga loop
Ang DIP SW8 gigamit aron itakda ang mode sa pagkontrol sa drayber.
Ang "off" nagpasabot sa closed-loop control mode;
Ang "on" nagpasabot sa open-loop control mode ug mahimong gamiton sa pagsulay sa motor.
Indikasyon sa LED nga kahimtang sa pagtrabaho sa drayber
| kahimtang sa LED | Status sa drayber | |
| Ang green nga timailhan anaa sa dugay nga panahon | Dili ma-enable ang driver | |
| Ang berde nga timailhan nagkidlap-kidlap | Ang drayber nagtrabaho nga normal | |
| Usa ka berde nga timailhan ug usa ka pula nga timailhan | Overcurrent sa drayber | |
| Usa ka berde nga indikasyon ug duha ka pula nga indikasyon | Ang gahum sa input sa drayber overvoltage | |
| Usa ka berde nga timailhan ug tulo nga pula nga mga timailhan | Ang internal nga voltage sa driver sayop | |
| Usa ka berde ug upat nga pula nga mga timailhan | Ang sayup sa pagsubay milapas sa mga limitasyon | |
| Usa ka berde ug lima ka pula nga mga timailhan | Encoder phase sayop | |
Kasagaran nga mga sayup ug pag-troubleshoot
| Phenomenon | Posible nga mga sitwasyon | Mga solusyon |
| Dili muandar ang motor | Patay ang timailhan sa kuryente | Susiha ang sirkito sa suplay sa kuryente alang sa normal nga suplay sa kuryente |
| Ang rotor sa motor gi-lock apan ang motor dili molihok | Ang signal sa pulso huyang; dugangi ang signal karon sa 7-16mA | |
| Hinay kaayo ang tulin | Pilia ang husto nga micro-stepping | |
| Gipanalipdan ang drayber | Pagsulbad sa alarma ug pag-usab sa gahum | |
| I-enable ang problema sa signal | Ipataas o idiskonekta ang signal sa pagpaandar | |
| Ang pulso sa sugo dili husto | Susiha kung ang ibabaw nga kompyuter adunay output sa pulso | |
| Sayop ang steering sa motor | Ang rotary nga direksyon sa motor balikbalik | I-adjust ang DIP SW5 |
| Ang kable sa motor gidiskonekta | Susiha ang koneksyon | |
| Ang motor adunay usa lamang ka direksyon | Pulse mode error o DIR port nadaot | |
| Ang indikasyon sa alarma gi-on | Sayop ang koneksyon sa motor | Susiha ang koneksyon sa motor |
| Ang koneksyon sa motor ug koneksyon sa encoder sayup | Susiha ang han-ay sa koneksyon sa encoder | |
| Ang voltage sobra ka taas o ubos kaayo | Susiha ang suplay sa kuryente | |
| Sayop ang posisyon o katulin | Nabalda ang signal | Kuhaa ang pagpanghilabot alang sa kasaligan nga grounding |
| Ang command input dili husto | Susiha ang taas nga instruksyon sa kompyuter aron masiguro nga husto ang output | |
| Sayop ang setting sa Pulse kada rebolusyon | Susiha ang kahimtang sa DIP switch ug husto nga ikonektar ang mga switch | |
| Abnormal ang signal sa encoder | Ilisan ang motor ug kontaka ang tiggama | |
| Ang terminal sa drayber | Short circuit tali sa mga terminal | Susiha ang polarity sa kuryente o external short circuit |
| nasunog | Ang internal nga pagsukol tali sa mga terminal dako kaayo | Susiha kung adunay bisan unsang solder ball tungod sa sobra nga pagdugang sa solder sa mga koneksyon sa wire |
| Ang motor walay tolerance | Mubo ra kaayo ang oras sa pagpatulin ug paghinay | Bawasan ang pagpadali sa command o dugangi ang mga parameter sa pagsala sa drayber |
| Ubos kaayo ang torque sa motor | Pilia ang motor nga adunay taas nga torque | |
| Bug-at kaayo ang karga | Susiha ang gibug-aton ug kalidad sa load ug i-adjust ang mekanikal nga istruktura | |
| Ubos kaayo ang suplay sa kuryente | Ilisan ang angay nga suplay sa kuryente |
Apendise A. Garantiya Clause
A.1 Panahon sa warranty: 12 ka bulan
Naghatag kami og kalidad nga kasiguruhan sa usa ka tuig gikan sa petsa sa pagpadala ug libre nga serbisyo sa pagpadayon sa among mga produkto sa panahon sa warranty.
A.2 Dili iapil ang mosunod:
- Ang dili husto nga koneksyon, sama sa polarity sa suplay sa kuryente gibaliktad ug gisulod/bira ang koneksyon sa motor kung konektado ang suplay sa kuryente.
- Labaw sa mga kinahanglanon sa elektrikal ug kalikopan.
- Usba ang internal device nga walay pagtugot.
A.3 Proseso sa pagmentinar
Alang sa pagmentinar sa mga produkto, palihug sunda ang mga pamaagi nga gipakita sa ubos:
- Kontaka ang among kawani sa serbisyo sa kostumer aron makuha ang pagtugot sa pag-rework.
- Ang sinulat nga dokumento sa panghitabo sa kapakyasan sa drayber gilakip sa mga butang, ingon man ang impormasyon sa pagkontak ug mga paagi sa pagpadala sa pagpadala.
Address sa pagpadala:
Post code:
Tel.:
szruitech.com
Mga Dokumento / Mga Kapanguhaan
 |
RTELLIGENT T60-IO Closed Loop Stepper Driver [pdf] Manwal sa Gumagamit T60-IO, Closed Loop Stepper Driver, T60-IO Closed Loop Stepper Driver |



