修訂歷史
| 版本 | 修訂 歷史 | 日期 |
| R1 | 初始版 | 2020年XNUMX月 |
| R1.1 | SNRSTAT:更新 InstallState 的描述 | 2020年XNUMX月 |
| R1.2 | 2.2 主要特點:添加和細化規範 | 2020年XNUMX月 |
| R1.3 | 2.25.1節新增參數:新增模組使用說明 | 2020年XNUMX月 |
| R1.4 | 增加SMT鋼網說明 | 2021年XNUMX月 |
| R1.5 | 更新電源VCC和V_BCKP | 2021年XNUMX月 |
| R1.6 | 在 5.2 節中添加註釋 | 2021 年 XNUMX 月 |
| R1.7 | 如果不使用熱啟動,將V_BCKP連接到VCC。 GNSS 晶片符合 AEC-Q100 標準。 | 2022 年 XNUMX 月 |
版權
© 版權所有 2009-2022 Unicore Communications, Inc. 保留所有權利。 未經版權所有者的明確書面許可,不得出於任何目的以任何形式或通過任何電子或機械方式(包括影印和錄製)複製或傳播本文檔的任何部分。
免責聲明
由於方法、設計和製造方面的不斷進步,本文檔的內容如有修訂,恕不另行通知,並不代表 Unicore Communications, Inc. 的承諾。本手冊中包含的信息被認為是真實和正確的在出版時。
產品結束view
範圍
本文檔描述了 UNICORECOMM UM220-INS 系列產品的硬件、安裝、規格和使用等信息。
觀眾
本文件旨在提出一個view UNICORECOMM UM220-INS系列產品。 預計觀眾將具備 GNSS 接收器方面的專業知識。
介紹
產品描述
UM220-INS系列產品(包括UM220-INS NL、UM220-INS NF)是基於UNICORECOMM低功耗GNSS SoC——UFirebird(UC6226),專為汽車導航設計的GNSS+MEMS雙系統模塊。 UM220-INS系列產品內置六軸MEMS,支持多系統聯合定位或單系統獨立定位,即使在隧道、地下車庫也能持續輸出GNSS+MEMS慣性定位結果。
UM220-INS模塊中的GNSS芯片符合AEC-Q100標準,生產過程符合IATF 16949。

圖 2-1 UM220-INS 系列模塊(左側:UM220-INS NL,右側:UM220-INS NF)
UM220-INS 系列模塊用戶手冊
|
變體 |
年級 | 系統* | 介面 | 數據更新 速度* | ||||||
| 專業的 | 汽車 | 全球定位系統 | 北斗* | 格洛納斯* | 伽利略 | QZSS | 串口1 | 串口2 | ||
| UM220-INS NL | ● | ● | ● | ● | ● | ● | ● | ● | 1赫茲 | |
| UM220-INS NF | ● | ● | ● | ● | ● | ● | ● | ● | 1赫茲 | |
UM220-INS系列模塊支持聯合定位、獨立定位等多種定位方式:
- GPS L1+SBAS+QZSS
- GPS+GLONASS+伽利略+SBAS+QZSS
- GPS+BDS+Galileo+SBAS+QZSS(默認模式)
- 北斗系統
QZSS 和 SBAS 僅在啟用 GPS 時可用
- 北斗系統不能與格洛納斯系統並行運行。
- 模塊默認數據更新率為1Hz,可配置為10Hz。
主要特點
| 力量 | |
| 卷tage | +3.0V~3.6V直流電壓 |
| 功耗1 | 90毫瓦 |
| RF 輸入 | |
| 頻率 | 1559~1605MHz |
| 輸入駐波比 | ≤2.5 |
| 輸入阻抗 | 50Ω |
| 天線增益 | 15~30分貝 |
| 物理特徵 | |
| 方面 | 16.0毫米*12.2毫米*2.6毫米 |
| 環境 | |
| 工作溫度 | -40℃~+85℃ | |||||
| 儲存溫度 | -45℃~+90℃ | |||||
| 輸入/ 輸出 數據 介面 | ||||||
| 串口 | UART*2,LVTTL。 | |||||
| GNSS 表現 | ||||||
|
頻率 |
北斗 B1: 1561.098MHz GPS L1: 1575.42MHz 格洛納斯 L1: 1602+0.5625*k (MHz)
伽利略 E1:1575.42MHz |
|||||
|
TTFF (首次修復時間) |
GPS+GLO+GA | GPS+BD+GA | ||||
| 冷啟動 熱啟動 重捕獲 AGNSS | 30年代1年代1年代5年代 | 30年代1年代1年代5年代 | ||||
| 定位精度2 | GPS+GLO+GA | GPS+BD+GA | ||||
| 2m | 2m | |||||
| 速度精度 (RMS) | GPS+GLO+GA | GPS+BD+GA | ||||
| 0.02米/秒 | 0.01米/秒 | |||||
|
靈敏度 |
全球定位系統+全球定位系統+遺傳算法 | GPS+北斗+遺傳算法 | BD | 全球定位系統 | 格洛 | |
| 追蹤 | -161dBm | -161dBm | -159dBm | -161dBm | -158dBm | |
| 獲得 | -147dBm | -147dBm | -144dBm | -147dBm | -142dBm | |
| 熱啟動 | -154dBm | -154dBm | -149dBm | -154dBm | -148dBm | |
| 重新獲取 | -157dBm | -157dBm | -156dBm | -157dBm | -153dBm | |
| DR 位置錯誤 | 典型值3 % 的距離使用 GNSS outage | |||||
| 時間脈衝信號的頻率 | 1赫茲 | |||||
| 最大導航速率(測量速率) | 10赫茲 | |||||
| 導航延遲 | 標稱 100 毫秒 | |||||
| 最大傳感器測量信息輸出速率 | 10赫茲 |
| 時間脈衝信號精度 | 有效值 30ns (GPS+BD) 99% 50ns (GPS+BD) |
| 數據輸出3 | NMEA 0183,Unicore 協議 |
|
操作限制 |
動力 ≤ 4g 海拔 50000m 速度 515m/s |
介面

串口
UM220-INS 系列模組支援兩個可設定的 UART 連接埠。 COM1為主串口,支援資料傳輸及韌體升級功能,訊號輸入輸出為LVTTL。預設波特率為115200bps,最高可配置為460800bps。確保 COM1 連接到 PC 或外部處理器以進行韌體升級。 COM2 僅限支援資料傳輸,不能用於韌體升級。
里程表(FWD/WHEELTICK)
UM220-INS系列模塊有一個里程計輸入接口,包括FWD和WHEELTICK,有助於提高模塊的定位精度。
微機電系統
UM220-INS系列模塊板載六軸MEMS、三軸陀螺儀和三軸加速器。 MEMS提供載體姿態和速度變化的信息,結合GNSS進行組合導航計算。 這種組合確保了比獨立 GNSS 更連續和不間斷的定位,尤其是在信號不佳的情況下。
1PPS
UM220-INS 系列模塊輸出 1 PPS,脈衝寬度和極性可調。 1PPS 不適用於定時應用。
重置
低音量tage 有效,要求激活時間至少持續10ms
系統安裝
先決條件
UM220-INS 系列模塊是靜電敏感器件 (ESD),安裝時必須採取特殊預防措施。 操作不當會導致組件損壞。
- 按正確的順序執行第 3.2 節中的步驟。
- 靜電放電 (ESD) 可能會損壞設備。 本章中提到的所有操作都應在防靜電工作台上進行,使用防靜電腕帶和導電泡沫墊。 如果沒有防靜電工作台,可以戴上防靜電腕帶,另一端連接金屬架,起到防靜電作用。
- 握住模塊的邊緣,不要觸摸模塊的任何組件。
- 請仔細檢查模塊是否有明顯鬆動或損壞。 如有任何問題,請聯繫我們或當地經銷商。
圖 3-1 顯示了 UM220-INS 系列模塊與 EVK 套件的典型安裝。

請在收到 UM220-INS 系列模塊包裝後仔細檢查包裝內容。
- UM220-INS EVK 套件(帶交流適配器)
- UM220-INS 系列模塊用戶手冊
- UNICORECOMM uSTAR 應用程序包
- 支持GPS L1和BDS B1/GLONASS L1的合格天線
- 直接串口線和USB
- 帶串行端口的 PC 或筆記本電腦(Windows 7 及以上)
請保留箱子和防靜電塑料袋以便存放和搬運
系統安裝
執行以下步驟安裝模塊:
- 步驟1:確保做好充分的防靜電措施,如防靜電腕帶、工作台接地等;
- 步驟2:打開UM220-INS評估套件;
- 步驟3:選擇合適增益的GNSS天線,將其固定在非遮蔽區域,使用適當的線纜將天線連接至UM220-INS EVK;
- 步驟4:透過串口線將PC連接到EVK串口;
- 步驟6:在PC上開啟uSTAR軟體;
- 步驟7:透過uSTAR配置接收器顯示星座 view、日誌消息和接收者狀態等。
技術規格
電氣規格
絕對最大額定值
| 物品 | 最小 | 最大限度 | 單元 | 描述 |
| 電源 (VCC) | -0.5 | 3.6 | V | 主電源 |
| 備份卷tage (V_BCKP) | -0.5 | 3.6 | V | RTC 備用電源 |
| 數字 IO (RXD1, RXD2)4 | -0.5 | 3.6 | V | 卷tage 數字信號引腳 |
| 射頻輸入 | – | +3 | 分貝 | 天線最大輸入功率 |
| 儲存溫度 TSTG | -45 | 90 | ℃ | 儲存溫度 |
| SMT 回流焊溫度 TSLDR | – | +260 | ℃ | 焊接溫度 |
運行條件
| 物品 | 別針 | 分鐘。 | 典型的 價值 | 最大限度。 | 大學 t | 狀態 |
| 電源 (VCC) | VCC | 3.0 | 3.3 | 3.6 | V | |
| 波紋卷tage | 峰壓 | 50 | mV | |||
| 峰值電流 | ICCP | 52 | mA | Vcc=3.0V | ||
| 跟踪平均電流 | IACQ | 28 | 30 | 32 | mA | 電源電壓=3.0V |
| 低電平輸入音量tage | 維利爾 | -0.3 | 0.2*VCC | V | ||
| 高電平輸入音量tage | VIH | 0.7*VCC | 電源電壓+0.3 | V | ||
| 低電平輸出音量tage | 音量 | 0 | 0.4 | V | 輸出電流=-2mA | |
| 高電平輸出音量tage | 音量 | Vcc–0.4 | VCC | V | Iout=2毫安 | |
| 天線增益5 | 甘特 | 15 | 20 | 30 | dB | |
| 噪音係數 | NF | 1.9 | dB | |||
| 工作溫度 | 最高稅率 | -40 | +85 | ℃ |
包括重設、TIMEPULSE、WHEELTICK、TXD2、RXD2、FWD、TXD1、RXD1 天線增益範圍是指預置的增益範圍amp模塊的 RF_IN 之前的 lifier。
方面
| 象徵 | 最小 (毫米) | 典型的 (毫米) | 最大限度 (毫米) |
| A | 15.9 | 16.0 | 16.5 |
| B | 12 | 12.2 | 12.4 |
| C | 2.4 | 2.6 | 2.8 |
| D | 0.9 | 1.0 | 1.3 |
| E | 1.0 | 1.1 | 1.2 |
| F | 2.9 | 3.0 | 3.1 |
| G | 0.9 | 1.0 | 1.3 |
| H | 0.9 | 1.0 | 1.1 |
| K | 0.7 | 0.8 | 0.9 |
| N | 0.4 | 0.5 | 0.6 |
| M | 0.8 | 0.9 | 1.0 |

引腳定義(頂部 View)
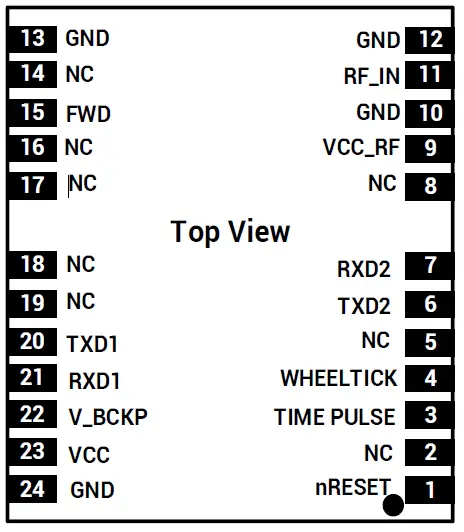
| 別針 不 | 姓名 | 輸入/輸出 | 電力 等級 | 描述 |
| 1 | 復位 | I | 左心室TTL | Reset低電平有效,不使用則旁路 |
| 2 | NC | – | – | 預訂的 |
| 3 | 時間脈衝 | O | 左心室TTL | 時間脈衝(1PPS) |
|
4 |
輪拍 |
I |
左心室TTL |
里程表速度脈衝,如果不使用則繞過。 強烈推薦使用,可接受的最大脈衝頻率為5KHz,最小脈衝寬度大於100us。注意:里程表信號不正確會導致產品使用出現嚴重問題。 請確保信號正確。 |
| 5 | NC | – | – | 預訂的 |
| 6 | 發送端2 | O | 左心室TTL | 串口 2-TX |
| 7 | 接收端2 | I | 左心室TTL | 串口 2-RX |
| 8 | NC | – | – | 預訂的 |
| 9 | VCC_RF | O | 天饋輸出 | |
| 10 | 接地 | – | – | 地面 |
| 11 | 射頻輸入 | I | – | GNSS信號輸入 |
| 12 | 接地 | – | – | 地面 |
| 13 | 接地 | – | – | 地面 |
| 14 | NC | – | – | 預訂的 |
| 別針 不 | 姓名 | 輸入/輸出 | 電力 等級 | 描述 |
|
15 |
前輪驅動 |
I |
左心室TTL |
里程表方向輸入,不用則繞行。強烈建議使用High level=forwardLow level=backward
注意:里程表信號不正確會導致產品使用出現嚴重問題。 請確保信號正確。 |
| 16 | NC | – | – | 預訂的 |
| 17 | NC | – | – | 預訂的 |
| 18 | NC | – | – | 預訂的 |
| 19 | NC | – | – | 預訂的 |
| 20 | 發送端1 | O | 左心室TTL | 串口 1-TX |
| 21 | 接收端1 | I | 左心室TTL | 串口 1-RX |
|
22 |
V_BCKP |
I |
1.65V~3.6V |
備份卷tage 供電,適用於熱啟動。如果不使用熱啟動功能,請將V_BCKP連接至VCC。請勿將其接地或懸空。 |
| 23 | 電壓控制電路 | – | 3.0V~3.6V | 供應量tage |
| 24 | 接地 | – | – | 地面 |
印刷電路板封裝

PCB焊錫設計時,確保UM220-INS系列模塊下方區域全部被焊錫層覆蓋。
硬體設計
設計考慮
為使UM220-INS系列模組正常運作,需要正確連接以下訊號。 VCC模組單調性好,要求下沖和振鈴保證在5%VCC以內。如果VCC斷電然後重新啟動,斷電時間必須大於10ms。如果VCC供電無法滿足上述要求,則有可能導致UM220-INS模組無法正常啟動。模組未上電時,需確保電源及GPIO(PPS、TX、RX、RESET)處於高電阻狀態或低電平,避免漏電導致模組工作異常。
如果使用串口2和每秒脈衝(1PPS),TXD1必須串2KΩ電阻,每秒脈衝(4.7PPS)必須串1KΩ電阻
- 將所有 GND 引腳接地。
- 為 VCC 引腳提供可靠的電源。
- 將 RF_IN 信號連接到天線,並確保電路上的 50 Ω 阻抗匹配。
- 確保 COM1 連接到 PC 或外部處理器,用戶可以使用此串口接收位置數據。 COM1 也用於固件升級。
在設計中註意以下事項以獲得良好的性能
- 電源:穩定且低紋波功率對於良好的性能是必要的。
- 使用LDO保證電源的純度。
- 在佈局中將 LDO 放置在盡可能靠近模塊的位置。
- 加寬電源線路佈線或採用覆銅面傳輸電流。
- 避免穿過任何大功率或高電感設備,例如電磁線圈。
- 確保峰峰值體積tage紋波不超過50mV。
- UART接口:確保主設備的訊號和波特率與UM220-INS系列模組一致。
- 天線接口:確保天線阻抗匹配,且線路短且光滑,盡量避免銳角。
- 盡量避開UM220-INS系列模塊下面的電路。
- 本模塊為溫度敏感器件,溫度急劇變化會導致性能下降,請盡量遠離大功率高溫空氣和發熱設備。
天線
如果UM220-INS系列模塊使用+3V有源天線,建議使用VCC_RF管腳通過饋電電感給天線饋電。

筆記: 如果使用者對 ESD 要求較高(> ± 2000 V),則應考慮使用其他方法為天線供電,而不是使用 VCC_RF 引腳。這種情況下,建議選擇ESD防護等級高的電源晶片。電源電路中也可能使用氣體放電管、壓敏電阻、TVS管等高功率保護元件,進一步保護模組免受ESD損壞或其他電氣過應力(EOS)。如果UM220-INS系列模組使用+3V以外的主動天線,則偏壓tage 天線所需的V_BIAS用於通過饋電電感為天線供電。

如果UM220-INS系列模塊使用無源天線,直接將天線接到RF_IN,VCC_RF可以懸空。 需要注意的是,與有源天線相比,使用無源天線可能會導致 GNSS 性能下降。

序列埠
UM220-INS 系列模塊串口為LVTTL 電平,使用RS232 轉換器連接PC。

里程表連接
UM220-INS系列模組支援與里程表連接的方向(FWD)和速度脈衝(WHEELTICK)訊號。如果模組獲得有效的方向和速度脈衝訊號,可以提高模組定位軌蹟的精度。車輛里程表訊號一般為12V,訊號品質較差。因此,車輛里程表訊號需要經過訊號濾波、光耦隔離和電平轉換才能傳輸到UM220-INS NF使用。

系統坐標
UM220-INS系列模組的座標必須與車輛座標一致,否則必須按照對應協議手冊中的CFGROTAT指令進行相關設定。


- 盾牌的法線方向為Z軸,長軸為Y,短軸為X。
- 模塊坐標必須與車輛坐標一致,即:X軸和R軸同向平行,Y軸和F軸同向平行,Z軸和U-軸平行於同一方向。
模塊的安裝
UM220-INS 系列模塊必須與車身剛性連接並牢固固定。
- 天線安裝時盡量正面朝上並固定牢固; 確保天線所在環境仰角大於15°,空間無遮擋。
- 天線所在環境,1568±20MHz頻率範圍內無強干擾源。
安裝說明
UM220-INS 系列模塊必須與車輛牢固連接,以防止模塊與車輛之間出現任何偏移或振動。 UM220-INS 系列模塊不得安裝在車輛的懸架部分(帶彈性部分)。 車輛在行駛過程中,車輛坐標系的任何變化都會嚴重影響UM220-INS模塊,使其無法正常工作。
安裝角度定義
車輛坐標為RFU,模塊坐標為xyz,如圖5-5和圖5-6所示。 模塊安裝角度的AngleR、angleF、angleU定義如下:
- 使RFU坐標的初始狀態與xyz坐標的初始狀態重合
- 沿z軸旋轉模塊的γ角
- 沿新的x軸旋轉模塊的α角
- 沿新的y軸旋轉模塊的β角
- 模塊現在處於與實際安裝相同的狀態,角度R=α,角度F=β,角度U=γ

模塊的安裝選項
- 免費安裝(默認模式)
UM220-INS系列模塊集成了三軸陀螺儀和三軸加速度計,內置自校準算法,支持模塊相對於車輛坐標系任意安裝角度自由安裝,如、完全水平安裝、一定角度傾斜安裝、翻轉安裝。 - 固定安裝
根據安裝角度定義,將準確的安裝角度手動配置到模塊中。 這種安裝方法需要很短的校準時間。 手動配置安裝角度時,最大角度誤差限制在±5度以內。
參考訊息
CFGROTA
- 留言格式: $ CFGROTAT,angleR,angleF,angleU,模式
- 描述: 設置或輸出模塊相對於車輛坐標系的安裝角度配置。
- 參數:
- angleR、angleF、angleU,單位5.6.2°,詳見0.01
- mode,代表安裝角度配置模式:
0——一般安裝模式,安裝角度輸入值比較粗(10deg以內)
2 – 自動安裝模式,無需安裝角度。
評論
- 自由安裝方式選擇2,固定安裝方式選擇0;
- 將實際安裝角度包括angleR、angleF、angleU輸入到模塊中。 配置完成後,通過CFGSAVE命令將配置保存到flash中,否則下次開機需要重新識別。
- INS 上的任何配置都會導致 INS 模塊在正常運行時或掉電重啟後重新初始化,之前完成或正在進行的標定操作將被重置。
信噪比統計數據
- 留言格式: $SNRSTAT、insstatus、odostatus、InstallState、Mapstat
- 描述:輸出初始狀態(固定安裝模式和自由安裝模式均適用)
- 參數:
insstatus:INS的初始狀態- 1:IMU設備故障
- 0: 停用
- 1:已初始化
- 2:安裝角度已知
- 3: 初始化完成
odostatus:里程表初始化狀態 - 1:里程表裝置故障
- 0: 停用
- 1:初始化比例因子
- 2:比例因子初始化完成
- 3:比例因子校準完成
- 安裝狀態
- IMU設備故障,無法估計安裝角度
- 校准進行中
- 當前衛星信息質量不足,需要更好的衛星條件
- 航母當前機動條件不足,需加速推進
- 載體當前速度太低,需要提高。
- 地圖統計:
- 沒有配置串口進入MAP信息
- 串口沒有收到MAP報文或發送的MAP報文超時
- 收到 MAP 信息但未應用於復合導航
- 接收 MAP 信息並將其應用於復合導航
- 完全免費安裝測試
- 完全自由安裝模塊
- 輸入命令$CFGROTAT,0,0,0,2(工廠模式不需要配置)
- 輸入命令$CFGSAVE(工廠模式不需要配置)
- 自校準的過程要滿足以上停放、衛星質量和機動等條件。通過$SNRSTAT輸出確認自校準是否完成,當insstatus變為3時,自校準完成。
- 確保自校準完成後進入衛星質量差的路段。
- 如果需要地下室熱啟動功能,Vbackup需要持續供電;
模塊校準和注意事項
自校準
UM220-INS系列模塊安裝後,需要進行自校準,以保證模塊輸出的準確性。 在自校準過程中,模塊估計安裝狀態參數和傳感器參數。 模塊自校準完成前為全衛星導航模式,自校準完成後為衛星導航與慣導緊湊組合模式。
完成自校準的條件
- 上電後觸發自校準,停三分鐘以上;
- 自校準過程中需要良好的衛星能見度(可見衛星數不少於0顆,CN30在XNUMXdB以上),衛星觀測質量越好,校準速度越快。
- 要求車輛在正常行駛狀態下做90度轉彎動作XNUMX次以上。
- 在正常行駛的前提下,保持前行車速在36公里/小時以上。 加速次數越多(建議以大於0.5m/s平方的加速度行駛不少於10次)行駛時間越長,標定速度越快。慣性導航第一次對准後( insstatus 3),在正常開放環境下仍需行駛15分鐘左右,充分訓練慣導裝置。 對於前amp例如,如果慣性導航設備在第一次對准後立即進入隧道、車庫等複雜環境,導航精度可能會稍差。
筆記
- 模塊的正常使用只需要一次自校準過程。
- INS模塊校準完成後,必須完全斷電後才能移動,包括主VCC和備用V_BACKUP。
拆卸
當需要拆卸模塊時,建議用電烙鐵熔化模塊兩側引腳的焊錫,然後用鑷子將模塊拆卸下來。 不要使用其他方式移除模塊(例如ample,模組被熱風槍吹掉),可能導致模組損壞。
包裹
產品標籤

包裝說明
UM220-INS系列模塊採用載帶捲盤方式(適用於主流表面貼裝設備),採用真空密封鋁箔防靜電袋包裝,內有乾燥劑以防潮。 使用回流焊工藝焊接模組時,請嚴格按照IPC標準對模組進行濕度控制。 由於載帶等包裝材料只能承受65攝氏度的溫度,烘烤時需要將模塊從包裝中取出。

| 物品 | 描述 |
| 模組 | 500張/卷 |
|
捲軸尺寸 |
托盤:13″
外徑:330mm,內徑:100mm,寬度:24mm 厚度:2.0毫米 |
| 載帶 | 間距:20mm |
UM220 I NS系列模組的額定等級為MSL 3級,烘烤要求請參考相關IPC/JEDEC標準。請訪問 web地點 www.jedec.org 下載了解詳情。 UM220 INS系列模組的保存期限為一年。
乾淨的
請勿使用酒精或其他有機溶劑進行清潔,否則可能會導致水垢殘留到屏蔽殼內,導致發黴等問題。
回流焊
為了避免裝置掉落,焊接時應將模組放置在主機板頂部。建議回流焊溫度曲線如下圖9 1所示(焊膏建議使用M 705 GRN 360)。
筆記:模組只能焊接一次。

筆記:鋼網的孔徑需滿足客戶自己的設計要求及檢驗規範,鋼網的厚度應在0.15mm以上,建議0.18mm。
和芯通信公司
中國北京市海淀區奉賢東路 3 號 F7,100094
- www.unicorecomm.com
- 電話:86-10-69939800
- 傳真:86-10-69939888
- info@unicorecomm.com
- www.unicorecomm.com
文件/資源
 |
Unicore Comm UM220-INS 多GNSS組合導航定位模組 [pdf] 使用者手冊 UM220-INS 多GNSS組合導航定位模組,UM220-INS,多GNSS組合導航定位模組,導航定位模組,定位模組 |



