Historia rewizji
| Wersja | Rewizja Historia | Data |
| R1 | Wydanie początkowe | Luty 2020 |
| R1.1 | SNSTAT: zaktualizuj opis InstallState | Czerwiec 2020 |
| R1.2 | 2.2 Kluczowe funkcje: dodaj i doprecyzuj specyfikację | sierpień 2020 |
| R1.3 | Dodaj parametry w sekcji 2.25.1: dodaj uwagi dotyczące użytkowania modułu | Październik 2020 |
| R1.4 | Dodaj opis szablonu SMT | Czerwiec 2021 |
| R1.5 | Zaktualizuj zasilanie VCC i V_BCKP | sierpień 2021 |
| R1.6 | Dodaj uwagę w sekcji 5.2 | Listopad 2021 |
| R1.7 | Jeśli nie jest używany gorący start, podłącz V_BCKP do VCC. Chip GNSS kwalifikowany zgodnie z AEC-Q100. Sprawdź VSWR w sekcji 2.2 | Listopad 2022 |
Prawo autorskie
© Copyright 2009-2022 Unicore Communications, Inc. Wszelkie prawa zastrzeżone. Żadna część tego dokumentu nie może być powielana ani przesyłana w jakiejkolwiek formie lub w jakikolwiek sposób, elektroniczny lub mechaniczny, łącznie z kopiowaniem i nagrywaniem, w jakimkolwiek celu bez wyraźnej pisemnej zgody właściciela praw autorskich.
Zastrzeżenie
Treść tego dokumentu może podlegać zmianom bez powiadomienia ze względu na ciągły postęp w metodologii, projektowaniu i produkcji i nie stanowi zobowiązania ze strony Unicore Communications, Inc. Informacje zawarte w tym podręczniku są uważane za prawdziwe i prawidłowe w momencie publikacji.
Produkt ponadview
Zakres
W niniejszym dokumencie opisano informacje dotyczące sprzętu, instalacji, specyfikacji i użytkowania produktów serii UNICORECOMM UM220-INS.
Publiczność
Dokument ten ma na celu przedstawienie ponadview produktów serii UNICORECOMM UM220-INS. Od widzów oczekuje się posiadania wiedzy specjalistycznej na temat odbiorników GNSS.
Wstęp
Opis produktu
Produkty serii UM220-INS (m.in. UM220-INS NL, UM220-INS NF) to dwusystemowe moduły GNSS+MEMS przeznaczone do nawigacji samochodowej w oparciu o układ UNICORECOMM małej mocy GNSS SoC – UFirebird (UC6226). Dzięki wbudowanemu sześcioosiowemu modułowi MEMS oraz obsłudze wspólnego pozycjonowania wielu systemów lub samodzielnego pozycjonowania jednego systemu, produkty z serii UM220-INS mogą w sposób ciągły generować wyniki pozycjonowania inercyjnego GNSS+MEMS nawet w tunelach i garażach podziemnych.
Chip GNSS w module UM220-INS jest kwalifikowany zgodnie z AEC-Q100, a proces produkcji jest zgodny z IATF 16949.

Rysunek 2-1 Moduły serii UM220-INS (lewa strona: UM220-INS NL, prawa strona: UM220-INS NF)
Instrukcja obsługi modułów serii UM220-INS
|
Wariant |
Stopień | System* | Interfejs | DaneAktualizacja Wskaźnik* | ||||||
| Profesjonalny | Automobilowy | GPS | BDS* | GLONASS* | Galileusz | QZSS | UART1 | UART2 | ||
| UM220-INS NL | ● | ● | ● | ● | ● | ● | ● | ● | 1 Hz | |
| UM220-INS NF | ● | ● | ● | ● | ● | ● | ● | ● | 1 Hz | |
Moduły serii UM220-INS obsługują wiele trybów pozycjonowania, w tym pozycjonowanie wspólne i pozycjonowanie samodzielne:
- GPS L1+SBAS+QZSS
- GPS+GLONASS+Galileo+SBAS+QZSS
- GPS+BDS+Galileo+SBAS+QZSS (tryb domyślny)
- BDS
QZSS i SBAS są dostępne tylko wtedy, gdy włączony jest GPS
- System BDS nie może działać równolegle z systemem GLONASS.
- Domyślna częstotliwość aktualizacji danych modułu wynosi 1 Hz, którą można skonfigurować na 10 Hz.
Główne cechy
| Moc | |
| Tomtage | +3.0 V ~ 3.6 V prądu stałego |
| Zużycie energii1 | 90mW |
| RF Wejście | |
| Częstotliwość | 1559~1605MHz |
| WSPÓŁCZYNNIK WYSOKOŚCI WARTOŚCI WEJŚCIOWEJ | ≤2.5 |
| Impedancja wejściowa | 50Ω |
| Zysk anteny | 15~30dB |
| Postacie fizyczne | |
| Wymiar | 16.0mm*12.2mm*2.6mm |
| Środowisko | |
| Temperatura pracy | -40℃ ~ +85℃ | |||||
| Temperatura przechowywania | -45℃ ~ +90℃ | |||||
| Wejście/ Wyjście Dane Interfejs | ||||||
| UART | UART*2, LVTTL. Szybkość transmisji: 4800~460800bps | |||||
| GNSS Wydajność | ||||||
|
Częstotliwość |
BDS B1: 1561.098 MHz GPS L1: 1575.42 MHzGLONASS L1: 1602+0.5625*k (MHz)
Galileo E1: 1575.42 MHz |
|||||
|
TTFF (Czas na pierwszą naprawę) |
GPS+GLO+GA | GPS+BD+GA | ||||
| Zimny start, gorący start, ponowne pozyskiwanie AGNSS | 30s 1s 1s 5s | 30s 1s 1s 5s | ||||
| Dokładność pozycjonowania2 | GPS+GLO+GA | GPS+BD+GA | ||||
| 2m | 2m | |||||
| Dokładność prędkości (RMS) | GPS+GLO+GA | GPS+BD+GA | ||||
| 0.02m/s | 0.01m/s | |||||
|
Wrażliwość |
GPS+GL+GA | GPS+BD+GA | BD | GPS | GLOS | |
| Śledzenie | -161dBm | -161dBm | -159dBm | -161dBm | -158dBm | |
| Nabytek | -147dBm | -147dBm | -144dBm | -147dBm | -142dBm | |
| Hot start | -154dBm | -154dBm | -149dBm | -154dBm | -148dBm | |
| Ponowne przejęcie | -157dBm | -157dBm | -156dBm | -157dBm | -153dBm | |
| Błąd pozycji DR | typ. 3% odległości przebytej przy użyciu GNSS outage | |||||
| Częstotliwość sygnału impulsu czasu | 1 Hz | |||||
| Maksymalna szybkość nawigacji (szybkość pomiaru) | 10 Hz | |||||
| Opóźnienie nawigacji | Nominalnie 100 ms | |||||
| Maksymalna szybkość wysyłania komunikatów pomiaru czujnika | 10 Hz |
| Dokładność sygnału impulsu czasowego | RMS 30ns (GPS+BD) 99% 50ns (GPS+BD) |
| Dane wyjściowe3 | NMEA 0183, protokół Unicore |
|
Limity operacyjne |
Dynamika ≤ 4g Wysokość 50000m Prędkość 515m/s |
Interfejsy

UART
Moduły serii UM220-INS obsługują dwa konfigurowalne porty UART. COM1 to główny port szeregowy, który obsługuje funkcję przesyłania danych i aktualizacji oprogramowania sprzętowego, wejście/wyjście sygnału to LVTTL. Domyślna szybkość transmisji wynosi 115200bps i można ją skonfigurować do 460800bps. Upewnij się, że COM1 jest podłączony do komputera PC lub zewnętrznego procesora w celu aktualizacji oprogramowania sprzętowego. COM2 jest ograniczony do obsługi transmisji danych i nie można go używać do aktualizacji oprogramowania sprzętowego.
Licznik przebiegu (FWD/WHEELTICK)
Moduły serii UM220-INS posiadają interfejs wejściowy licznika przebiegu, obejmujący FWD i WHEELTICK, które są przydatne do poprawy dokładności lokalizacji modułu.
MEMS
Moduły serii UM220-INS integrują na pokładzie sześcioosiowe MEMS, trójosiowy żyroskop i trójosiowy akcelerator. MEMS dostarcza informacji na temat położenia przewoźnika i zmian prędkości, które są łączone z GNSS w celu wykonania połączonych obliczeń nawigacyjnych. Ta kombinacja zapewnia znacznie bardziej ciągłe i nieprzerwane pozycjonowanie niż samodzielny GNSS, szczególnie w warunkach słabego sygnału.
1PPS
Moduły serii UM220-INS wyprowadzają 1 PPS z regulowaną szerokością impulsu i polaryzacją. 1PPS nie służy do pomiaru czasu.
Nastawić
Niska objętośćtagJest ważny, a czas aktywności musi trwać co najmniej 10ms
Instalacja systemu
Wymagania wstępne
Moduły serii UM220-INS są urządzeniami wrażliwymi na ładunki elektrostatyczne (ESD) i należy je instalować z zachowaniem szczególnych środków ostrożności podczas obsługi. Niewłaściwa obsługa może skutkować uszkodzeniem podzespołów.
- Wykonaj kroki z sekcji 3.2 we właściwej kolejności.
- Wyładowania elektrostatyczne (ESD) mogą spowodować uszkodzenie urządzenia. Wszystkie czynności wymienione w tym rozdziale należy wykonywać na antystatycznym stole warsztatowym, używając antystatycznej opaski na nadgarstek i przewodzącej podkładki piankowej. Jeśli antystatyczny stół warsztatowy nie jest dostępny, załóż antystatyczną opaskę na nadgarstek i podłącz drugi koniec do metalowej ramy, aby pełnić rolę antystatyczną.
- Chwyć za krawędź modułu i NIE dotykaj żadnych elementów modułu.
- Proszę dokładnie sprawdzić, czy moduł nie jest wyraźnie poluzowany lub uszkodzony. W przypadku jakichkolwiek problemów prosimy o kontakt z nami lub lokalnym sprzedawcą.
Rysunek 3-1 przedstawia typową instalację modułów serii UM220-INS z pakietami EVK.

Prosimy o dokładne sprawdzenie zawartości paczki po otrzymaniu paczki z modułami serii UM220-INS.
- Zestaw UM220-INS EVK (z zasilaczem sieciowym)
- Instrukcja obsługi modułu serii UM220-INS
- Pakiet aplikacji UNICORECOMM uSTAR
- Kwalifikowana antena obsługująca GPS L1 i BDS B1/GLONASS L1
- Bezpośredni kabel szeregowy i USB
- Komputer stacjonarny lub laptop z portami szeregowymi (Windows 7 i nowsze)
Proszę zachować pudełka i antystatyczne torby plastikowe do przechowywania i przenoszenia
Instalacja systemu
Aby zainstalować moduł, wykonaj poniższe czynności:
- Krok 1: Upewnij się, że zastosowano pełne środki antystatyczne, takie jak antystatyczna opaska na nadgarstek, uziemiająca stół warsztatowy;
- Krok 2: Otwórz zestaw ewaluacyjny UM220-INS;
- Krok 3: Wybierz antenę GNSS o odpowiednim zysku, zamocuj ją w obszarze niezablokowanym, używając odpowiedniego kabla do podłączenia anteny do UM220-INS EVK;
- Krok 4: Podłącz komputer do portu szeregowego EVK za pomocą kabla szeregowego;
- Krok 6: Otwórz oprogramowanie uSTAR na komputerze;
- Krok 7: Skonfiguruj odbiornik poprzez uSTAR, aby wyświetlał konstelacje view, komunikaty dziennika, stan odbiornika itp.
Dane techniczne
Specyfikacje elektryczne
Maksymalne wartości bezwzględne
| Przedmiot | Min | Maksymalnie | Jednostka | Opis |
| Zasilacz (VCC) | -0.5 | 3.6 | V | Główne zasilanie |
| Kopia zapasowa tomtage (V_BCKP) | -0.5 | 3.6 | V | Zasilanie rezerwowe dla RTC |
| Cyfrowe wejście/wyjście (RXD1, RXD2)4 | -0.5 | 3.6 | V | Tomtage pinów sygnału cyfrowego |
| RF_IN | – | +3 | dBm | Maksymalna moc wejściowa anteny |
| Temperatura przechowywania TSTG | -45 | 90 | °C | Temperatura przechowywania |
| Temperatura rozpływu SMT TSLDR | – | +260 | °C | Temperatura lutowania |
Stan pracy
| Przedmiot | Szpilka | Min. | Typowy Wartość | Maks. | Uni t | Stan |
| Zasilacz (VCC) | Vcc | 3.0 | 3.3 | 3.6 | V | |
| Fala Objętościtage | Vp-p | 50 | mV | |||
| Prąd szczytowy | Iccp | 52 | mA | Vcc=3.0 V | ||
| Śledzenie średniego prądu | IACQ | 28 | 30 | 32 | mA | Vcc=3.0V |
| NISKI poziom wejściowy Voltage | WIL | -0.3 | 0.2*Vcc | V | ||
| Wejście wysokiego poziomu Voltage | VIH | 0.7*Vcc | Vcc+0.3 | V | ||
| Objętość wyjściowa NISKIEGO poziomutage | TOM | 0 | 0.4 | V | Iwyj=-2mA | |
| Wysoki poziom wyjściowy Voltage | WOH | Vcc–0.4 | Vcc | V | Iwy=2 mA | |
| Zysk anteny 5 | GANT | 15 | 20 | 30 | dB | |
| Współczynnik szumów | NF | 1.9 | dB | |||
| Temperatura pracy | TOPR | -40 | +85 | °C |
Zawiera reset, TIMEPULSE, WHEELTICK, TXD2, RXD2, FWD, TXD1, RXD1. Zakres wzmocnienia anteny odnosi się do zakresu wzmocnienia sygnału wstępnego.amplifier przed RF_IN modułu.
Wymiary
| Symbol | Min (mm) | Typowy (mm) | Maksymalnie (mm) |
| A | 15.9 | 16.0 | 16.5 |
| B | 12 | 12.2 | 12.4 |
| C | 2.4 | 2.6 | 2.8 |
| D | 0.9 | 1.0 | 1.3 |
| E | 1.0 | 1.1 | 1.2 |
| F | 2.9 | 3.0 | 3.1 |
| G | 0.9 | 1.0 | 1.3 |
| H | 0.9 | 1.0 | 1.1 |
| K | 0.7 | 0.8 | 0.9 |
| N | 0.4 | 0.5 | 0.6 |
| M | 0.8 | 0.9 | 1.0 |

Definicja pinów (Top View)
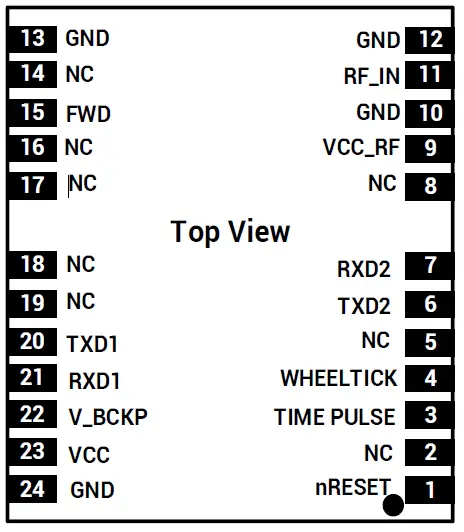
| Szpilka NIE | Nazwa | Wejście/Wyjście | Elektryczny Poziom | Opis |
| 1 | nRESETUJ | I | LVTTL | ResetLow aktywny, obejście, jeśli nie jest używane |
| 2 | NC | – | – | Skryty |
| 3 | IMPULS CZASU | O | LVTTL | Impuls czasowy (1PPS) |
|
4 |
KOŁA |
I |
LVTTL |
Impuls prędkości licznika kilometrów, obejście, jeśli nie jest używane. Zdecydowanie zaleca się stosowanie, maksymalna dopuszczalna częstotliwość impulsów wynosi 5 kHz, a minimalna szerokość impulsu jest większa niż 100 us.Uwaga: Nieprawidłowe sygnały licznika kilometrów spowodują poważne problemy w użytkowaniu produktu. Upewnij się, że sygnał jest prawidłowy. |
| 5 | NC | – | – | Skryty |
| 6 | TXD2 | O | LVTTL | UART2-TX |
| 7 | RXD2 | I | LVTTL | UART2-RX |
| 8 | NC | – | – | Skryty |
| 9 | VCC_RF | O | Wyjście zasilania anteny | |
| 10 | GND | – | – | Grunt |
| 11 | RF_IN | I | – | Wejście sygnału GNSS |
| 12 | GND | – | – | Grunt |
| 13 | GND | – | – | Grunt |
| 14 | NC | – | – | Skryty |
| Szpilka NIE | Nazwa | Wejście/Wyjście | Elektryczny Poziom | Opis |
|
15 |
Przód |
I |
LVTTL |
Wejście kierunku licznika kilometrów, obejście, jeśli nie jest używane. Zdecydowanie zaleca się użycie opcji Wysoki poziom = do przodu Niski poziom = do tyłu
Uwaga: Nieprawidłowe sygnały licznika kilometrów spowodują poważne problemy w użytkowaniu produktu. Upewnij się, że sygnał jest prawidłowy. |
| 16 | NC | – | – | Skryty |
| 17 | NC | – | – | Skryty |
| 18 | NC | – | – | Skryty |
| 19 | NC | – | – | Skryty |
| 20 | TXD1 | O | LVTTL | UART1-TX |
| 21 | RXD1 | I | LVTTL | UART1-RX |
|
22 |
V_BCKP |
I |
1.65V~3.6V |
Kopia zapasowatagZasilanie, odpowiednie do gorącego startu. Jeśli nie korzystasz z funkcji gorącego startu, podłącz V_BCKP do VCC. NIE podłączaj go do uziemienia ani nie pozostawiaj go w stanie pływającym. |
| 23 | VCC | – | 3.0V~3.6V | Objętość dostawtage |
| 24 | GND | – | – | Grunt |
Opakowania na PCB

Projektując lutowanie PCB, należy upewnić się, że obszar pod modułami serii UM220-INS jest całkowicie pokryty warstwą lutu.
Projektowanie sprzętu
Projektowanie w rozważaniach
Do poprawnej pracy modułów serii UM220-INS wymagane jest prawidłowe podłączenie poniższych sygnałów. Moduł VCC charakteryzuje się dobrą monotonicznością, a niedoregulowanie i dzwonienie muszą być gwarantowane w granicach 5% VCC. Jeśli VCC zostanie wyłączone, a następnie ponownie uruchomione, czas wyłączenia musi być dłuższy niż 10 ms. Jeżeli zasilacz VCC nie będzie w stanie spełnić powyższych wymagań, istnieje prawdopodobieństwo, że moduł UM220-INS nie uruchomi się normalnie. Gdy moduł nie jest włączony, należy upewnić się, że zasilanie i GPIO (PPS, TX, RX, RESET) znajdują się w stanie wysokiej impedancji lub niskiego poziomu, aby uniknąć nieprawidłowej pracy modułu spowodowanej wyciekiem.
Jeśli używany jest port szeregowy 2 i impuls na sekundę (1PPS), rezystor 1KΩ musi być podłączony szeregowo do TXD2, a rezystor 4.7KΩ musi być podłączony szeregowo przy impulsie na sekundę (1PPS)
- Podłącz wszystkie piny GND do masy.
- Zapewnij niezawodne zasilanie pinu VCC.
- Podłącz sygnał RF_IN do anteny i upewnij się, że impedancja w obwodzie odpowiada 50 Ω.
- Upewnij się, że COM1 jest podłączony do komputera PC lub zewnętrznego procesora. Użytkownicy mogą używać tego portu szeregowego do odbierania danych o pozycji. COM1 jest również używany do aktualizacji oprogramowania sprzętowego.
Aby uzyskać dobrą wydajność, należy zwrócić uwagę na następujące elementy projektu
- Zasilacz: Do dobrej wydajności niezbędna jest stabilna moc o niskim tętnieniu.
- Użyj LDO, aby zapewnić czystość zasilania.
- Umieść LDO w układzie jak najbliżej modułu.
- Poszerz okablowanie obwodu zasilania lub użyj powierzchni miedzianej do przesyłania prądu.
- Unikaj przechodzenia przez urządzenia o dużej mocy lub wysokiej indukcyjności, takie jak cewka magnetyczna.
- Upewnij się, że szczyt do szczytu objtagTętnienie nie przekracza 50mV.
- Interfejsy UART: upewnij się, że sygnały i szybkość transmisji głównego sprzętu są zgodne z modułami serii UM220-INS.
- interfejs anteny: upewnij się, że impedancja anteny jest dopasowana, a obwód jest krótki i gładki, staraj się unikać kąta ostrego.
- Staraj się unikać obwodów poniżej modułów serii UM220-INS.
- Moduł ten jest urządzeniem wrażliwym na temperaturę, szybkie zmiany temperatury spowodują zmniejszenie wydajności, należy go trzymać jak najdalej od wszelkich urządzeń grzewczych i powietrznych o dużej mocy, o wysokiej temperaturze.
Antena
Jeżeli moduły serii UM220-INS korzystają z aktywnej anteny +3V, zaleca się użycie pinu VCC_RF do zasilania anteny przez cewkę zasilającą.

Notatka: Jeśli użytkownik ma wysokie wymagania dotyczące ESD (> ± 2000 V), powinien rozważyć inną metodę zasilania anteny, zamiast używać pinu VCC_RF. W takim przypadku zaleca się wybór układu zasilacza o wysokim poziomie ochrony ESD. W obwodzie zasilania można również zastosować rurkę wyładowczą, warystor, rurkę TVS i inne urządzenia zabezpieczające dużej mocy, aby dodatkowo chronić moduł przed uszkodzeniami ESD lub innymi przeciążeniami elektrycznymi (EOS). Jeśli moduły serii UM220-INS korzystają z aktywnej anteny innej niż +3V, napięcie polaryzacji voltage V_BIAS wymagane przez antenę służy do zasilania anteny przez cewkę zasilającą.

Jeśli moduły serii UM220-INS korzystają z anteny pasywnej, podłącz antenę bezpośrednio do RF_IN, a VCC_RF można pozostawić pływającą. Należy zaznaczyć, że w porównaniu do anten aktywnych, zastosowanie anten pasywnych może spowodować pogorszenie wydajności GNSS.

Port szeregowy
Porty szeregowe modułów serii UM220-INS są na poziomie LVTTL, do połączenia z komputerem PC należy zastosować konwerter RS232.

Podłączenie licznika kilometrów
Moduły serii UM220-INS obsługują sygnały kierunku (FWD) i impulsu prędkości (WHEELTICK) łączące się z licznikiem kilometrów. Dokładność trajektorii pozycjonowania modułu można zwiększyć, jeśli moduł uzyska efektywne sygnały impulsowe kierunku i prędkości. Sygnał licznika kilometrów w pojazdach wynosi zazwyczaj 12 V, a jakość sygnału jest niska. Dlatego też, aby sygnały licznika przebiegu pojazdu mogły być przesyłane do UM220-INS NF w celu ich wykorzystania, wymagane jest filtrowanie sygnału, izolacja transoptora i konwersja poziomu.

Współrzędne systemu
Współrzędne modułów serii UM220-INS muszą być zgodne z współrzędnymi pojazdów, w przeciwnym razie należy wykonać odpowiednią konfigurację, postępując zgodnie z poleceniem CFGROTAT w instrukcji odpowiedniego protokołu.


- Normalnym kierunkiem tarczy jest oś Z, długa oś to Y, a krótka oś to X.
- Współrzędna modułu musi być zgodna z pojazdem, co oznacza, że: oś X i oś R są równoległe w tym samym kierunku, osie Y i oś F są równoległe w tym samym kierunku, a osie Z i U- osie są równoległe w tym samym kierunku.
Instalacja modułu
Moduły serii UM220-INS muszą być sztywno połączone z karoserią pojazdu i stabilnie zamocowane.
- Antenę należy zainstalować przodem do góry, w miarę możliwości i mocno zamocowaną; upewnić się, że kąt elewacji otoczenia, w którym znajduje się antena, jest większy niż 15°, a przestrzeń nie jest zasłonięta.
- W środowisku, w którym znajduje się antena nie występuje silne źródło zakłóceń w zakresie częstotliwości 1568±20MHz.
Instrukcje instalacji
Moduły serii UM220-INS muszą być trwale podłączone do pojazdu, aby zapobiec przesunięciom lub wibracjom pomiędzy modułem a pojazdem. Modułów serii UM220-INS nie należy montować w części zawieszenia pojazdu (z częścią elastyczną). Gdy pojazd jest w ruchu, jakakolwiek zmiana układu współrzędnych pojazdu będzie miała poważny wpływ na moduł UM220-INS i uniemożliwi jego normalną pracę.
Definicja kąta instalacji
Współrzędna pojazdu to RFU, a współrzędna modułu to xyz, jak pokazano na rysunkach 5-5 i 5-6. AngleR, angleF i angleU kąta montażu modułu definiuje się jak poniżej:
- Porównaj początkowy stan współrzędnej RFU ze współrzędną xyz
- Obróć kąt γ modułu wzdłuż osi z
- Obróć kąt α modułu wzdłuż nowej osi x
- Obróć kąt β modułu wzdłuż nowej osi Y
- Moduł znajduje się teraz w takim samym stanie, jak rzeczywista instalacja, przy czym angleR=α, angleF=β, angleU=γ

Opcje instalacji modułu
- Darmowa instalacja (tryb domyślny)
Moduły serii UM220-INS integrują trójosiowy żyroskop i trójosiowy akcelerometr, z wbudowanym algorytmem samokalibracji, który umożliwia swobodną instalację modułu pod dowolnym kątem montażu układu współrzędnych pojazdu, np. , montaż całkowicie poziomy, montaż nachylony pod pewnym kątem i montaż z klapką. - Stała instalacja
Zgodnie z definicją kąta montażu, dokładny kąt montażu jest konfigurowany ręcznie w module. Ta metoda instalacji wymaga krótkiego czasu kalibracji. Przy ręcznej konfiguracji kąta montażu maksymalny błąd kąta jest ograniczony do ± 5 stopni.
Wiadomości referencyjne
CFGROTAT
- Format wiadomości: $ CFGROTAT,kątR, kątF, kątU, tryb
- Opis: Ustaw lub wyprowadź konfiguracje kąta instalacji modułu w odniesieniu do układu współrzędnych pojazdu.
- Parametry:
- angleR, angleF i angleU, szczegóły w 5.6.2 z jednostką 0.01°
- mode, co oznacza tryb konfiguracji kąta montażu:
0 – Ogólny tryb instalacji, wprowadzona wartość kąta instalacji jest stosunkowo zgrubna (w granicach 10 stopni)
2 – Automatyczny tryb montażu, nie jest wymagany kąt montażu.
Uwaga
- Wybierz 2 dla trybu bezpłatnej instalacji i 0 dla instalacji stacjonarnej;
- Wprowadź do modułu rzeczywiste kąty instalacji, w tym angleR, angleF i angleU. Po zakończeniu konfiguracji zapisz konfigurację w pamięci flash za pomocą polecenia CFGSAVE, w przeciwnym razie należy ją ponownie zidentyfikować przy następnym uruchomieniu.
- Jakakolwiek konfiguracja w INS spowoduje ponowną inicjalizację modułu INS podczas normalnej pracy lub po wyłączeniu i ponownym uruchomieniu, a wcześniej zakończone lub trwające operacje kalibracji zostaną zresetowane.
SNSTAT
- Format wiadomości: $SNRSTAT,insstatus,odostatus,InstallState,Mapstat
- Opis: Stan początkowy wyjścia (dotyczy zarówno trybu instalacji stacjonarnej, jak i trybu instalacji swobodnej)
- Parametry:
insstatus: Początkowy status INS- 1: Awaria urządzenia IMU
- 0: Wyłączony
- 1: zainicjowany
- 2: Kąt montażu jest znany
- 3: Inicjalizacja została zakończona
odostatus: Stan inicjalizacji licznika kilometrów - 1: Awaria urządzenia licznika przebiegu
- 0: Wyłączony
- 1: Zainicjuj współczynnik skali
- 2: Inicjalizacja współczynnika skali została zakończona
- 3: Kalibracja współczynnika skali została zakończona
- Stan instalacji
- Awaria urządzenia IMU, brak możliwości oszacowania kąta montażu
- W trakcie kalibracji
- Obecna jakość informacji satelitarnych jest niewystarczająca i potrzebne są lepsze warunki satelitarne
- Obecne warunki manewrowe lotniskowca są niewystarczające i należy go przyspieszyć
- Obecna prędkość przewoźnika jest zbyt niska i należy ją zwiększyć.
- Mapastat:
- Żaden port szeregowy nie jest skonfigurowany do wprowadzania informacji MAP
- Port szeregowy nie odbiera żadnych komunikatów MAP lub upłynął limit czasu wysłanego komunikatu MAP
- Informacje MAP są odbierane, ale nie są stosowane w nawigacji złożonej
- Informacje MAP są odbierane i stosowane w nawigacji złożonej
- Całkowicie bezpłatny test instalacji
- Zainstaluj moduł całkowicie swobodnie
- Wprowadź polecenie $CFGROTAT,0,0,0,2 (dla trybu fabrycznego nie jest wymagana żadna konfiguracja)
- Wprowadź polecenie $CFGSAVE (dla trybu fabrycznego nie jest wymagana żadna konfiguracja)
- Proces samokalibracji powinien spełniać powyższe warunki parkowania, jakości satelity i manewrowości, itp. Potwierdź, czy samokalibracja została zakończona poprzez wyjście $SNRSTAT, a gdy status osiągnie 3, samokalibracja zostanie zakończona.
- Upewnij się, że samokalibracja została zakończona, a następnie wejdź na drogę ze słabą jakością satelity.
- Jeśli potrzebna jest funkcja gorącego startu w piwnicy, Vbackup wymaga ciągłego zasilania;
Kalibracja modułu i uwaga
Samokalibracja
Po zainstalowaniu modułów serii UM220-INS wymagana jest samokalibracja w celu zapewnienia dokładności wyjścia modułu. Moduł w procesie samokalibracji dokonuje estymacji parametrów stanu instalacji oraz parametrów czujnika. Moduł znajduje się w trybie pełnej nawigacji satelitarnej przed zakończeniem samokalibracji, a po zakończeniu samokalibracji znajduje się w trybie kombinacji nawigacji satelitarnej i nawigacji inercyjnej.
Warunki zakończenia samokalibracji
- Samokalibracja jest uruchamiana po włączeniu zasilania, zatrzymana na dłużej niż trzy minuty;
- W procesie samokalibracji wymagana jest dobra widoczność satelitów (liczba widocznych satelitów nie jest mniejsza niż sześć, a CN0 przekracza 30dB), im lepsza jest jakość obserwacji satelitarnej, tym szybsza będzie kalibracja.
- Podczas normalnej pracy pojazdu wymagane jest wykonanie manewru skrętu o 90 stopni więcej niż pięć razy.
- Przy założeniu normalnej jazdy należy utrzymywać prędkość jazdy do przodu powyżej 36 km/h. Im więcej razy przyspieszamy (zaleca się jazdę z przyspieszeniem większym niż 0.5m/s do kwadratu nie mniej niż 10 razy) i im dłuższy jest czas jazdy, tym szybsza będzie kalibracja. Po pierwszym zestrojeniu nawigacji inercyjnej ( insstatus 3), nadal konieczne jest prowadzenie pojazdu przez około 15 minut w normalnym, otwartym środowisku, aby odpowiednio przeszkolić urządzenie do nawigacji inercyjnej. Na przykładample precyzja nawigacji może być nieco gorsza, jeśli inercyjne urządzenie nawigacyjne wejdzie do złożonego środowiska, takiego jak tunel lub garaż, natychmiast po pierwszym ustawieniu.
Notatka
- Normalne użytkowanie modułu wymaga tylko jednego procesu samokalibracji.
- Po skalibrowaniu modułu INS można go przenosić dopiero po całkowitym odcięciu zasilania, w tym głównego VCC i rezerwowego V_BACKUP.
Demontaż
W przypadku konieczności wyjęcia modułu zaleca się roztopić cynę lutowniczą kołków po obu stronach modułu lutownicą elektryczną i wyjąć moduł pęsetą. NIE używaj innych środków do wyjmowania modułu (npample, moduł zostanie przedmuchany opalarką), co może doprowadzić do uszkodzenia modułu.
Pakiet
Etykietowanie produktu

Opis pakietu
Moduły serii UM220-INS wykorzystują taśmę nośną i szpulę (odpowiednie dla popularnych urządzeń do montażu powierzchniowego), zapakowane w zamykane próżniowo, antystatyczne torby z folii aluminiowej, ze środkiem osuszającym wewnątrz, aby zapobiec wilgoci. W przypadku stosowania procesu zgrzewania rozpływowego do spawania modułów należy ściśle przestrzegać normy IPC dotyczącej kontroli wilgotności modułów. Ponieważ materiały opakowaniowe takie jak pas nośny wytrzymują jedynie temperaturę 65 stopni Celsjusza, moduły należy wyjąć z opakowania na czas pieczenia.

| Przedmiot | Opis |
| Moduł | 500 zdjęć/rolka |
|
Rozmiar rolki |
Taca: 13″
Średnica zewnętrzna: 330 mm, średnica wewnętrzna: 100 mm, szerokość: 24 mm Grubość: 2.0mm |
| Taśma nośna | Odstęp między: 20mm |
Moduły serii UM220 I NS mają poziom MSL 3, patrz odpowiednie normy IPC/JEDEC dotyczące wymagań dotyczących pieczenia. Proszę o dostęp do webstrona www.jedec.org do pobrania, aby uzyskać szczegółowe informacje. Okres trwałości modułów serii UM220 INS wynosi jeden rok.
Czysty
NIE WOLNO używać alkoholu ani innych rozpuszczalników organicznych do czyszczenia, ponieważ może to spowodować przedostanie się osadów do powłoki ekranującej, powodując pleśń i inne problemy.
Lutowanie reflow
Aby uniknąć upadku urządzenia, moduł należy podczas spawania umieścić na górze płyty głównej. Zalecana jest krzywa temperatury lutowania rozpływowego, jak pokazano na rysunku 9 1 poniżej (do pasty lutowniczej zaleca się M 705 GRN 360).
Notatka: Moduł można zespawać tylko raz.

Notatka: Otwory w szablonie muszą spełniać wymagania projektowe klienta i specyfikacje kontroli, a grubość szablonu powinna przekraczać 0.15 mm, a zalecana jest grubość 0.18 mm.
Unicore Communications, Inc.
F3, nr 7, Fengxian East Road, Haidian, Pekin, PRChiny, 100094
- www.unicorecomm.com
- Telefon: 86-10-69939800
- Faks: 86-10-69939888
- info@unicorecomm.com
- www.unicorecomm.com
Dokumenty / Zasoby
 |
Unicore Comm UM220-INS Zintegrowany moduł nawigacji i pozycjonowania Multi-GNSS [plik PDF] Instrukcja obsługi UM220-INS Zintegrowany moduł nawigacji i pozycjonowania z wieloma GNSS, UM220-INS, Zintegrowany moduł nawigacji i pozycjonowania z wieloma GNSS, moduł nawigacji i pozycjonowania, moduł pozycjonowania |



