História revízií
| Verzia | Revízia História | Dátum |
| R1 | Počiatočné vydanie | február 2020 |
| 1.1 XNUMX R | SNRSTAT: aktualizujte popis InstallState | jún 2020 |
| 1.2 XNUMX R | 2.2 Kľúčové vlastnosti: pridajte a spresnite špecifikáciu | august 2020 |
| 1.3 XNUMX R | Pridajte parametre v časti 2.25.1: pridajte poznámky k použitiu modulu | október 2020 |
| 1.4 XNUMX R | Pridajte popis šablóny SMT | jún 2021 |
| 1.5 XNUMX R | Aktualizujte napájací zdroj VCC a V_BCKP | august 2021 |
| 1.6 XNUMX R | Pridajte poznámku v časti 5.2 | november 2021 |
| 1.7 XNUMX R | Ak sa nepoužíva horúci štart, pripojte V_BCKP k VCC. GNSS čip kvalifikovaný podľa AEC-Q100. Revidujte VSWR v časti 2.2 | november 2022 |
Autorské práva
© Copyright 2009-2022 Unicore Communications, Inc. Všetky práva vyhradené. Žiadna časť tohto dokumentu nesmie byť reprodukovaná ani prenášaná v akejkoľvek forme alebo akýmikoľvek prostriedkami, elektronickými alebo mechanickými, vrátane fotokopírovania a nahrávania, na akýkoľvek účel bez výslovného písomného súhlasu vlastníka autorských práv.
Vylúčenie zodpovednosti
Obsah tohto dokumentu podlieha revízii bez upozornenia z dôvodu neustáleho pokroku v metodológii, dizajne a výrobe a nepredstavuje záväzok zo strany Unicore Communications, Inc. Informácie obsiahnuté v tejto príručke sa považujú za pravdivé a správne v čase zverejnenia.
Koniec produktuview
Rozsah
Tento dokument popisuje informácie o hardvéri, inštalácii, špecifikáciách a používaní produktov radu UNICORECOMM UM220-INS.
publikum
Tento dokument je určený na prezentáciu overview produktov radu UNICORECOMM UM220-INS. Očakáva sa, že publikum bude mať odborné znalosti o prijímačoch GNSS.
Úvod
Popis produktu
Produkty série UM220-INS (vrátane UM220-INS NL, UM220-INS NF) sú dvojsystémové moduly GNSS+MEMS určené pre automobilovú navigáciu na báze UNICORECOMM low power GNSS SoC – UFirebird (UC6226). So vstavaným šesťosovým MEMS a podporou viacsystémového polohovania kĺbov alebo samostatného polohovania pomocou jedného systému môže produkt radu UM220-INS neustále poskytovať výsledky inerciálneho polohovania GNSS+MEMS aj v tuneloch a podzemných garážach.
GNSS čip v module UM220-INS je kvalifikovaný podľa AEC-Q100 a výrobný proces je v súlade s IATF 16949.

Obrázok 2-1 Moduly série UM220-INS (ľavá strana: UM220-INS NL, pravá strana: UM220-INS NF)
Používateľská príručka modulov série UM220-INS
|
Variant |
stupňa | Systém* | Rozhranie | ÚdajeAktualizovať ohodnotiť* | ||||||
| Profesionálny | Automobilový priemysel | GPS | BDS* | GLONASS* | Galileo | QZSS | UART1 | UART2 | ||
| UM220-INS NL | ● | ● | ● | ● | ● | ● | ● | ● | 1 Hz | |
| UM220-INS NF | ● | ● | ● | ● | ● | ● | ● | ● | 1 Hz | |
Moduly série UM220-INS podporujú viacero režimov polohovania vrátane polohovania kĺbov a samostatného polohovania:
- GPS L1+SBAS+QZSS
- GPS+GLONASS+Galileo+SBAS+QZSS
- GPS+BDS+Galileo+SBAS+QZSS (predvolený režim)
- BDS
QZSS a SBAS sú dostupné len vtedy, keď je zapnuté GPS
- Systém BDS nemôže bežať paralelne so systémom GLONASS.
- Predvolená rýchlosť aktualizácie dát modulu je 1 Hz, ktorú je možné nakonfigurovať na 10 Hz.
Kľúčové vlastnosti
| Sila | |
| Voltage | +3.0V~3.6V VDC |
| Spotreba energie 1 | 90 mW |
| RF Vstup | |
| Frekvencia | 1559 ~ 1605 MHz |
| Vstup VSWR | ≤2.5 |
| Vstupná impedancia | 50Ω |
| Antenna Gain | 15 ~ 30 dB |
| Fyzické znaky | |
| Rozmer | 16.0 mm * 12.2 mm * 2.6 mm |
| Životné prostredie | |
| Prevádzková teplota | -40 ℃ ~ +85 ℃ | |||||
| Skladovacia teplota | -45 ℃ ~ +90 ℃ | |||||
| Vstup/ Výstup Údaje Rozhranie | ||||||
| UART | UART*2, LVTTL. Prenosová rýchlosť: 4800~460800bps | |||||
| GNSS Výkon | ||||||
|
Frekvencia |
BDS B1: 1561.098 MHz GPS L1: 1575.42 MHzGLONASS L1: 1602 + 0.5625*k (MHz)
Galileo E1: 1575.42 MHz |
|||||
|
TTFF (Čas na prvú opravu) |
GPS+GLO+GA | GPS+BD+GA | ||||
| Studený štart Horúci štart Opätovné získanie AGNSS | 30 s 1 s 1 s 5 s | 30 s 1 s 1 s 5 s | ||||
| Presnosť polohovania2 | GPS+GLO+GA | GPS+BD+GA | ||||
| 2m | 2m | |||||
| Presnosť rýchlosti (RMS) | GPS+GLO+GA | GPS+BD+GA | ||||
| 0.02 m/s | 0.01 m/s | |||||
|
Citlivosť |
GPS + GLO+GA | GPS + BD+GA | BD | GPS | GLO | |
| Sledovanie | -161 dBm | -161 dBm | -159 dBm | -161 dBm | -158 dBm | |
| Akvizícia | -147 dBm | -147 dBm | -144 dBm | -147 dBm | -142 dBm | |
| Hot Start | -154 dBm | -154 dBm | -149 dBm | -154 dBm | -148 dBm | |
| Opätovná akvizícia | -157 dBm | -157 dBm | -156 dBm | -157 dBm | -153 dBm | |
| Chyba polohy DR | typ. 3 % prejdenej vzdialenosti s GNSS outage | |||||
| Frekvencia časového impulzného signálu | 1 Hz | |||||
| Maximálna rýchlosť navigácie (rýchlosť merania) | 10 Hz | |||||
| Latencia navigácie | 100 ms nominálne | |||||
| Maximálna rýchlosť výstupu správy o meraní senzora | 10 Hz |
| Presnosť signálu časového impulzu | RMS 30ns (GPS+BD) 99% 50ns (GPS+BD) |
| Dátový výstup 3 | NMEA 0183, protokol Unicore |
|
Prevádzkové limity |
Dynamika ≤ 4 g Nadmorská výška 50000 515 m Rýchlosť XNUMX m/s |
Rozhrania

UART
Moduly série UM220-INS podporujú dva konfigurovateľné porty UART. COM1 je hlavný sériový port, ktorý podporuje prenos dát a funkciu aktualizácie firmvéru, vstup/výstup signálu je LVTTL. Predvolená prenosová rýchlosť je 115200bps a dá sa nakonfigurovať až na 460800bps. Uistite sa, že je COM1 pripojený k počítaču alebo externému procesoru kvôli aktualizácii firmvéru. COM2 je obmedzený na podporu prenosu dát a nemožno ho použiť na aktualizáciu firmvéru.
Počítadlo kilometrov (FWD/WHEELTICK)
Moduly série UM220-INS majú vstupné rozhranie pre počítadlo kilometrov vrátane FWD a WHEELTICK, ktoré sú užitočné na zlepšenie presnosti polohy modulu.
MEMS
Moduly série UM220-INS integrujú na palube šesťosový MEMS, trojosový gyroskop a trojosový akcelerátor. MEMS poskytuje informácie o zmene polohy a rýchlosti nosiča, ktoré sa kombinujú s GNSS na vykonanie kombinovaného výpočtu navigácie. Táto kombinácia zaisťuje oveľa súvislejšie a neprerušovanejšie polohovanie ako samostatný GNSS, najmä v podmienkach so slabým signálom.
1 PPS
Výstup modulov série UM220-INS 1 PPS s nastaviteľnou šírkou impulzu a polaritou. 1PPS nie je pre aplikáciu časovania.
Resetovať
Nízky objemtage platné a aktívny čas musí trvať aspoň 10 ms
Inštalácia systému
Predpoklady
Moduly série UM220-INS sú zariadenia citlivé na elektrostatický náboj (ESD) a pri manipulácii sa musia inštalovať so špeciálnymi opatreniami. Nesprávna prevádzka môže viesť k poškodeniu komponentov.
- Vykonajte kroky v časti 3.2 v správnom poradí.
- Elektrostatický výboj (ESD) môže spôsobiť poškodenie zariadenia. Všetky operácie uvedené v tejto kapitole by sa mali vykonávať na antistatickom pracovnom stole s použitím antistatického náramku a podložky z vodivej peny. Ak antistatický pracovný stôl nie je k dispozícii, nasaďte si antistatický remienok na zápästie a druhý koniec pripojte ku kovovému rámu, aby zohral úlohu pri antistatickom účinku.
- Držte okraj modulu a NEDOTÝKAJTE sa žiadnych súčastí modulu.
- Pozorne skontrolujte, či modul nie je zjavne uvoľnený alebo poškodený. V prípade akýchkoľvek problémov kontaktujte nás alebo miestneho predajcu.
Obrázok 3-1 zobrazuje typickú inštaláciu modulov série UM220-INS so súpravami EVK.

Po obdržaní balíka modulov série UM220-INS si prosím dôkladne skontrolujte obsah balenia.
- Sada UM220-INS EVK (s AC adaptérom)
- Používateľská príručka modulu série UM220-INS
- Aplikačný balík UNICORECOMM uSTAR
- Kvalifikovaná anténa podporujúca GPS L1 a BDS B1/GLONASS L1
- Priamy sériový kábel a USB
- PC alebo notebook so sériovými portami (Windows 7 a vyššie)
Krabice a antistatické plastové vrecká si uschovajte na skladovanie a manipuláciu
Inštalácia systému
Pri inštalácii modulu vykonajte nasledujúce kroky:
- Krok 1: Uistite sa, že ste vykonali úplné antistatické opatrenia, ako je antistatický remienok na zápästie, uzemnenie pracovného stola;
- Krok 2: Otvorte hodnotiacu súpravu UM220-INS;
- Krok 3: Vyberte GNSS anténu s príslušným ziskom, upevnite ju v neblokovanej oblasti pomocou vhodného kábla na pripojenie antény k UM220-INS EVK;
- Krok 4: Pripojte PC k sériovému portu EVK cez sériový kábel;
- Krok 6: Otvorte softvér uSTAR na počítači;
- Krok 7: Nakonfigurujte prijímač cez uSTAR na zobrazenie konštelácií view, protokolové správy a stav prijímača atď.
Technické špecifikácie
Elektrické špecifikácie
Absolútne maximálne hodnotenia
| Položka | Min | Max | Jednotka | Popis |
| Napájanie (VCC) | -0.5 | 3.6 | V | Hlavná sila |
| Backup Voltage (V_BCKP) | -0.5 | 3.6 | V | Záložný zdroj pre RTC |
| Digitálny IO (RXD1, RXD2)4 | -0.5 | 3.6 | V | Voltage digitálnych signálnych kolíkov |
| RF_IN | – | +3 | dBm | Maximálny vstupný výkon antény |
| Skladovacia teplota TSTG | -45 | 90 | °C | Skladovacia teplota |
| Teplota pretavenia SMT TSLDR | – | +260 | °C | Teplota spájkovania |
Prevádzkový stav
| Položka | Pin | Min. | Typické Hodnota | Max. | Uni t | Podmienka |
| Napájanie (VCC) | VDC | 3.0 | 3.3 | 3.6 | V | |
| Ripple Voltage | Vp-p | 50 | mV | |||
| Špičkový prúd | Iccp | 52 | mA | Vcc = 3.0 V | ||
| Sledovanie priemerného prúdu | IACQ | 28 | 30 | 32 | mA | Vcc = 3.0 V |
| NÍZKA Úrov. vstuptage | VIL | -0.3 | 0.2*Vcc | V | ||
| High Level Input Voltage | VIH | 0.7*Vcc | Vcc+0.3 | V | ||
| LOW Level Output Voltage | VOL | 0 | 0.4 | V | Iout = -2 mA | |
| High Level Output Voltage | VOH | Vcc – 0.4 | VDC | V | Iout = 2 mA | |
| Zosilnenie antény 5 | GANT | 15 | 20 | 30 | dB | |
| Obrázok šumu | NF | 1.9 | dB | |||
| Prevádzková teplota | TOPR | -40 | +85 | °C |
Vrátane resetovania, TIMEPULSE, WHEELTICK, TXD2, RXD2, FWD, TXD1, RXD1 Rozsah zisku antény sa vzťahuje na rozsah zisku preamppred RF_IN modulu.
Rozmery
| Symbol | Min (mm) | Typické (mm) | Max (mm) |
| A | 15.9 | 16.0 | 16.5 |
| B | 12 | 12.2 | 12.4 |
| C | 2.4 | 2.6 | 2.8 |
| D | 0.9 | 1.0 | 1.3 |
| E | 1.0 | 1.1 | 1.2 |
| F | 2.9 | 3.0 | 3.1 |
| G | 0.9 | 1.0 | 1.3 |
| H | 0.9 | 1.0 | 1.1 |
| K | 0.7 | 0.8 | 0.9 |
| N | 0.4 | 0.5 | 0.6 |
| M | 0.8 | 0.9 | 1.0 |

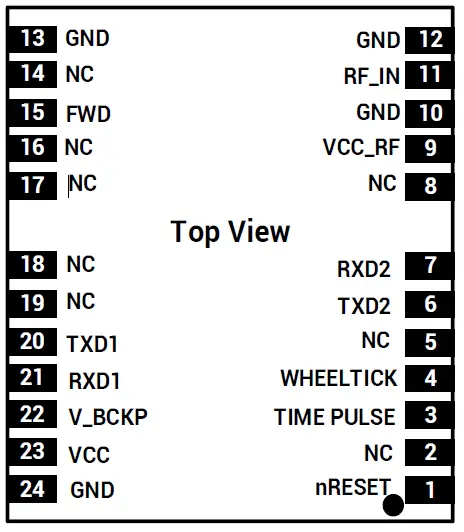
Definícia špendlíka (hore View)
| Pin Nie | Meno | I/O | Elektrické úroveň | Popis |
| 1 | nRESET | I | LVTTL | ResetLow aktívny, premostenie, ak sa nepoužíva |
| 2 | NC | – | – | Rezervované |
| 3 | TIMEPULSE | O | LVTTL | Časový impulz (1 PPS) |
|
4 |
WHEELTICK |
I |
LVTTL |
Impulz rýchlosti počítadla kilometrov, premostenie, ak sa nepoužíva. Dôrazne sa odporúča používať, maximálna prijateľná frekvencia impulzov je 5 kHz a minimálna šírka impulzu je väčšia ako 100 us.Poznámka: Nesprávne signály počítadla kilometrov budú viesť k vážnym problémom pri používaní produktu. Uistite sa, že je signál správny. |
| 5 | NC | – | – | Rezervované |
| 6 | TXD2 | O | LVTTL | UART 2-TX |
| 7 | RXD2 | I | LVTTL | UART 2-RX |
| 8 | NC | – | – | Rezervované |
| 9 | VCC_RF | O | Výstup antény | |
| 10 | GND | – | – | Ground |
| 11 | RF_IN | I | – | Vstup signálu GNSS |
| 12 | GND | – | – | Ground |
| 13 | GND | – | – | Ground |
| 14 | NC | – | – | Rezervované |
| Pin Nie | Meno | I/O | Elektrické úroveň | Popis |
|
15 |
FWD |
I |
LVTTL |
Vstup smeru počítadla kilometrov, premostenie, ak sa nepoužíva. Dôrazne sa odporúča použiť High level=forwardNow level=backward
Poznámka: Nesprávne signály počítadla kilometrov budú viesť k vážnym problémom pri používaní produktu. Uistite sa, že je signál správny. |
| 16 | NC | – | – | Rezervované |
| 17 | NC | – | – | Rezervované |
| 18 | NC | – | – | Rezervované |
| 19 | NC | – | – | Rezervované |
| 20 | TXD1 | O | LVTTL | UART 1-TX |
| 21 | RXD1 | I | LVTTL | UART 1-RX |
|
22 |
V_BCKP |
I |
1.65V~3.6V |
Záložný objtage napájanie, použiteľné pre horúci štart. Ak nepoužívate funkciu horúceho štartu, pripojte V_BCKP k VCC. NEPRIPÁJAJTE ho k zemi ani ho nenechávajte plávať. |
| 23 | VCC | – | 3.0V ~ 3.6V | Napájací objemtage |
| 24 | GND | – | – | Ground |
Balenie PCB

Pri návrhu spájkovania PCB sa uistite, že oblasť pod modulmi série UM220-INS je úplne pokrytá vrstvou spájky.
Dizajn hardvéru
Dizajn v úvahách
Na správne fungovanie modulov série UM220-INS je potrebné správne pripojiť nasledujúce signály. Modul VCC má dobrú monotónnosť a vyžaduje sa zaručenie podkmitu a zvonenia do 5 % VCC. Ak sa VCC vypne a potom reštartuje, čas vypnutia musí byť dlhší ako 10 ms. Ak napájanie VCC nespĺňa vyššie uvedené požiadavky, je pravdepodobné, že modul UM220-INS sa nespustí normálne. Keď modul nie je zapnutý, je potrebné zabezpečiť, aby napájací zdroj a GPIO (PPS, TX, RX, RESET) boli v stave vysokej impedancie alebo nízkej úrovne, aby sa predišlo abnormálnej činnosti modulu spôsobenej únikom.
Ak sa použije sériový port 2 a pulz za sekundu (1PPS), odpor 1KΩ musí byť zapojený do série na TXD2 a odpor 4.7KΩ musí byť zapojený do série pri pulze za sekundu (1PPS)
- Pripojte všetky piny GND k zemi.
- Poskytnite spoľahlivé napájanie kolíku VCC.
- Pripojte signál RF_IN k anténe a uistite sa, že impedancia 50 Ω zodpovedá obvodu.
- Uistite sa, že je COM1 pripojený k PC alebo externému procesoru, používatelia môžu použiť tento sériový port na príjem údajov o polohe. COM1 sa tiež používa na aktualizáciu firmvéru.
Aby ste dosiahli dobrý výkon, venujte pozornosť nasledujúcim položkám v dizajne
- Napájanie: Pre dobrý výkon je potrebný stabilný a nízky výkon zvlnenia.
- Na zabezpečenie čistoty napájania použite LDO.
- Umiestnite LDO k modulu čo najbližšie v rozložení.
- Rozšírte vedenie elektrického obvodu alebo použite medený povrch na prenos prúdu.
- Vyhnite sa prechádzaniu cez zariadenia s vysokým výkonom alebo vysokou indukčnosťou, ako je napríklad magnetická cievka.
- Uistite sa, že vrchol k vrcholu objtage zvlnenie nepresahuje 50 mV.
- Rozhrania UART: zabezpečte, aby signály a prenosová rýchlosť hlavného zariadenia boli v súlade so signálmi a prenosovou rýchlosťou modulov série UM220-INS.
- Anténne rozhranie: uistite sa, že impedančné prispôsobenie antény a obvod je krátky a hladký, snažte sa vyhnúť ostrému uhlu.
- Pokúste sa vyhnúť obvodom pod modulmi série UM220-INS.
- Tento modul je zariadenie citlivé na teplotu, rýchle zmeny teploty budú mať za následok znížený výkon, držte ho čo najďalej od všetkých vysokovýkonných vysokoteplotných vzduchových a vykurovacích zariadení.
Anténa
Ak moduly série UM220-INS používajú +3V aktívnu anténu, odporúča sa použiť kolík VCC_RF na napájanie antény cez napájaciu tlmivku.

Poznámka: Ak má používateľ vysoké požiadavky na ESD (> ± 2000 V), mal by zvážiť iný spôsob napájania antény namiesto použitia kolíka VCC_RF. V tomto prípade sa odporúča zvoliť napájací čip s vysokou úrovňou ESD ochrany. V napájacom obvode možno použiť aj plynovú výbojku, varistor, TVS trubicu a iné vysokovýkonné ochranné zariadenia na ďalšiu ochranu modulu pred poškodením ESD alebo iným elektrickým nadmerným napätím (EOS). Ak moduly série UM220-INS používajú aktívnu anténu inú ako +3V, predpätie vol.tage V_BIAS požadovaný anténou sa používa na napájanie antény cez napájací induktor.

Ak moduly série UM220-INS používajú pasívnu anténu, pripojte anténu priamo k RF_IN a VCC_RF môže zostať plávajúca. Je potrebné poznamenať, že v porovnaní s aktívnymi anténami môže použitie pasívnych antén spôsobiť zhoršenie výkonu GNSS.

Sériový port
Sériové porty modulov série UM220-INS sú na úrovni LVTTL, na pripojenie k PC použite prevodník RS232.

Pripojenie počítadla kilometrov
Moduly série UM220-INS podporujú signály smeru (FWD) a rýchlostných impulzov (WHEELTICK) prepojené s počítadlom kilometrov. Presnosť trajektórie polohovania modulu by sa mohla zvýšiť, ak modul získa efektívne signály smeru a rýchlosti impulzov. Signál počítadla kilometrov vozidiel je vo všeobecnosti 12 V a kvalita signálu je nízka. Na prenos signálov z počítadla kilometrov vozidla do UM220-INS NF na použitie je preto potrebné filtrovanie signálu, izolácia optočlena a konverzia úrovne.

Systémové súradnice
Súradnice modulov série UM220-INS musia byť v súlade so súradnicami vozidiel, v opačnom prípade musíte vykonať príslušnú konfiguráciu podľa príkazu CFGROTAT v príslušnej príručke protokolu.


- Normálny smer štítu je os Z, dlhá os je Y a krátka os je X.
- Súradnice modulu musia byť v súlade so súradnicami vozidla, čo znamená: os X a os R sú rovnobežné v rovnakom smere, os Y a os F sú rovnobežné v rovnakom smere a os Z a U- osi sú rovnobežné v rovnakom smere.
Inštalácia modulu
Moduly série UM220-INS musia byť pevne spojené s karosériou vozidla a pevne pripevnené.
- Anténa by mala byť inštalovaná tak, aby predná strana smerovala čo najviac nahor a pevne pripevnená; zabezpečte, aby bol elevačný uhol prostredia, kde je anténa umiestnená, väčší ako 15° a priestor bol voľný.
- V prostredí, kde je anténa umiestnená, nie je vo frekvencii 1568±20MHz silný zdroj rušenia.
Návod na inštaláciu
Moduly série UM220-INS musia byť pevne spojené s vozidlom, aby sa zabránilo akýmkoľvek odchýlkam alebo vibráciám medzi modulom a vozidlom. Moduly série UM220-INS by sa nemali inštalovať do časti zavesenia vozidla (s elastickou časťou). Keď sa vozidlo pohybuje, akákoľvek zmena súradnicového systému vozidla vážne ovplyvní modul UM220-INS a zabráni mu v normálnej činnosti.
Definícia montážneho uhla
Súradnica vozidla je RFU a súradnica modulu je xyz, ako je znázornené na obrázku 5-5 a obrázku 5-6. AngleR, angleF a angleU inštalačného uhla modulu sú definované takto:
- Zhoduje sa s počiatočným stavom súradnice RFU so súradnicou xyz
- Otočte uhol γ modulu pozdĺž osi z
- Otočte uhol α modulu pozdĺž novej osi x
- Otočte uhol β modulu pozdĺž novej osi y
- Modul je teraz v rovnakom stave ako skutočná inštalácia, s tým, že uhol R=α, uholF=β, uholU=γ

Možnosti inštalácie modulu
- Bezplatná inštalácia (predvolený režim)
Moduly série UM220-INS integrujú trojosový gyroskop a trojosový akcelerometer, so zabudovaným samokalibračným algoritmom, ktorý podporuje voľnú inštaláciu modulu s ohľadom na akýkoľvek uhol inštalácie súradnicového systému vozidla, ako napr. , úplne horizontálna inštalácia, naklonená inštalácia pod určitým uhlom a preklopná inštalácia. - Pevná inštalácia
Podľa definície inštalačného uhla je presný inštalačný uhol manuálne nakonfigurovaný do modulu. Tento spôsob inštalácie vyžaduje krátky čas kalibrácie. Pri manuálnej konfigurácii inštalačného uhla je maximálna chyba uhla obmedzená na ± 5 stupňov.
Referenčné správy
CFGROTAT
- Formát správy: $ CFGROTAT,uholR,uholF,uholU,režim
- Popis: Nastavte alebo vypíšte konfigurácie montážneho uhla modulu vzhľadom na súradnicový systém vozidla.
- Parametre:
- uholR, uholF a uholU, podrobnosti nájdete v 5.6.2 s jednotkou 0.01°
- režim, ktorý znamená režim konfigurácie inštalačného uhla:
0 – Všeobecný režim inštalácie, vstupná hodnota uhla inštalácie je relatívne hrubá (do 10 stupňov)
2 – Režim automatickej inštalácie, nie je potrebný žiadny uhol inštalácie.
Poznámka
- Vyberte 2 pre bezplatný režim inštalácie a 0 pre pevnú inštaláciu;
- Do modulu zadajte skutočné inštalačné uhly vrátane uhlaR, uhlaF a uhlaU. Po dokončení konfigurácie uložte konfiguráciu do pamäte flash pomocou príkazu CFGSAVE, inak ju treba pri ďalšom zavádzaní znova identifikovať.
- Akákoľvek konfigurácia na INS spôsobí opätovnú inicializáciu modulu INS počas normálnej prevádzky alebo po vypnutí a reštarte a vynulujú sa predtým dokončené alebo prebiehajúce kalibračné operácie.
SNRSTAT
- Formát správy: $SNRSTAT,insstatus,odostatus, InstallState, Mapstat
- Popis: Počiatočný stav výstupu (platí pre režim pevnej inštalácie aj režim bezplatnej inštalácie)
- Parametre:
insstatus: Počiatočný stav INS- 1: Porucha zariadenia IMU
- 0: Zakázané
- 1: inicializované
- 2: Uhol inštalácie je známy
- 3: Inicializácia je dokončená
odostatus: Stav inicializácie počítadla kilometrov - 1: Porucha zariadenia počítadla kilometrov
- 0: Zakázané
- 1: Inicializácia mierky
- 2: Inicializácia mierkového faktora je dokončená
- 3: Kalibrácia faktora mierky je dokončená
- InstallState
- Porucha zariadenia IMU, nie je možné odhadnúť uhol inštalácie
- V priebehu kalibrácie
- Súčasná kvalita satelitných informácií je nedostatočná a sú potrebné lepšie satelitné podmienky
- Súčasné manévrovacie podmienky nosiča sú nedostatočné a je potrebné ho urýchliť
- Aktuálna rýchlosť nosiča je príliš nízka a je potrebné ju zvýšiť.
- Mapstat:
- Na zadávanie informácií MAP nie je nakonfigurovaný žiadny sériový port
- Sériový port neprijíma žiadne správy MAP alebo vypršal časový limit odoslanej správy MAP
- Informácie MAP sa prijímajú, ale neaplikujú sa na zloženú navigáciu
- Informácie MAP sa prijímajú a aplikujú na zloženú navigáciu
- Úplne bezplatný test inštalácie
- Nainštalujte modul úplne voľne
- Zadajte príkaz $CFGROTAT,0,0,0,2 (pre továrenský režim nie je potrebná žiadna konfigurácia)
- Zadajte príkaz $CFGSAVE (pre továrenský režim nie je potrebná žiadna konfigurácia)
- Proces samokalibrácie by mal spĺňať vyššie uvedené podmienky parkovania, kvality satelitu a manévrovania atď. Potvrďte, či je samokalibrácia dokončená prostredníctvom výstupu $SNRSTAT, a keď sa stav stane 3, samokalibrácia je dokončená.
- Uistite sa, že je samokalibrácia dokončená a potom vstúpte na cestu so zlou kvalitou satelitu.
- Ak je potrebná funkcia horúceho štartu v suteréne, Vbackup vyžaduje nepretržité napájanie;
Kalibrácia modulu a upozornenie
Samokalibrácia
Po inštalácii modulov série UM220-INS je potrebná samokalibrácia na zabezpečenie presnosti výstupu modulu. V procese samokalibrácie modul odhaduje parametre stavu inštalácie a parametre snímača. Modul je v režime plnej satelitnej navigácie pred dokončením samokalibrácie a po dokončení samokalibrácie je v režime kompaktnej kombinácie satelitnej navigácie a inerciálnej navigácie.
Podmienky dokončenia samokalibrácie
- Samokalibrácia sa spustí po zapnutí, zastavte na viac ako tri minúty;
- Počas procesu samokalibrácie je potrebná dobrá viditeľnosť satelitov (počet viditeľných satelitov nie je menší ako šesť a CN0 je nad 30 dB), čím lepšia je kvalita satelitného pozorovania, tým rýchlejšia bude kalibrácia.
- Počas normálneho chodu vozidla je potrebné vykonať otočné manévre o 90 stupňov viac ako päťkrát.
- Udržujte rýchlosť jazdy vpred nad 36 km/h za predpokladu normálnej jazdy. Čím viac časov zrýchlenia (odporúča sa jazdiť so zrýchlením vyšším ako 0.5 m/s na druhú aspoň 10 krát) a čím dlhší je čas jazdy, tým rýchlejšia bude kalibrácia. Po prvom zarovnaní inerciálnej navigácie ( insstatus 3), je ešte potrebné jazdiť asi 15 minút v normálnom otvorenom prostredí, aby sa inerciálne navigačné zariadenie primerane natrénovalo. NapríkladampPresnosť navigácie môže byť o niečo horšia, ak inerciálne navigačné zariadenie vstúpi do zložitého prostredia, ako je tunel a garáž, hneď po prvom zarovnaní.
Poznámka
- Bežné používanie modulu vyžaduje iba jeden proces samokalibrácie.
- Po nakalibrovaní modulu INS je možné ho presunúť až po úplnom odpojení napájania, vrátane hlavného VCC a záložného V_BACKUP.
demontáž
Pri potrebe odstránenia modulu sa odporúča roztaviť spájkovací plech kolíkov na oboch stranách modulu elektrickou spájkovačkou a modul vybrať pinzetou. NEPOUŽÍVAJTE iné prostriedky na odstránenie modulu (naprample, je modul sfúknutý teplovzdušnou pištoľou), čo môže viesť k poškodeniu modulu.
Balíček
Označovanie výrobkov

Popis balenia
Moduly série UM220-INS používajú nosnú pásku a kotúč (vhodné pre bežné zariadenia na povrchovú montáž), balené vo vákuovo zapečatených antistatických vrecúškach z hliníkovej fólie, s vysúšadlom vo vnútri, aby sa zabránilo vlhkosti. Ak používate proces zvárania pretavením na zváranie modulov, prísne dodržiavajte normu IPC na riadenie vlhkosti na moduloch. Keďže obalové materiály, ako je nosný pás, znesú teplotu len 65 stupňov Celzia, moduly je potrebné počas pečenia z obalu vybrať.

| Položka | Popis |
| modul | 500 obrázkov na kotúč |
|
Veľkosť kotúča |
Zásobník: 13″
Vonkajší priemer: 330 mm, Vnútorný priemer: 100 mm, Šírka: 24 mm Hrúbka: 2.0 mm |
| Nosná páska | Vzdialenosť medzi: 20 mm |
Moduly série UM220 I NS sú hodnotené na úrovni MSL 3, požiadavky na pečenie nájdete v príslušných normách IPC/JEDEC. Prosím o prístup k webstránky www.jedec.org na stiahnutie pre podrobnosti. Skladovateľnosť modulov série UM220 INS je jeden rok.
Čistý
Na čistenie NEPOUŽÍVAJTE alkohol ani iné organické rozpúšťadlá, pretože by to mohlo viesť k vniknutiu zvyškov nečistôt do ochranného krytu, čo môže spôsobiť plesne a iné problémy.
Spájkové spájkovanie
Aby sa zabránilo pádu zariadenia, modul by mal byť počas zvárania umiestnený na vrchu základnej dosky. Odporúča sa krivka teploty spájkovania pretavením, ako je znázornené na obrázku 9 1 nižšie (pre spájkovaciu pastu sa odporúča M 705 GRN 360).
Poznámka: Modul je možné zvárať iba raz.

Poznámka: Otvory v šablóne musia spĺňať vlastné konštrukčné požiadavky zákazníka a špecifikácie kontroly a hrúbka šablóny by mala byť nad 0.15 mm a odporúča sa 0.18 mm.
Unicore Communications, Inc.
F3, č. 7, Fengxian East Road, Haidian, Peking, PRČína, 100094
- www.unicorecomm.com
- Telefón: 86-10-69939800
- Fax: 86-10-69939888
- info@unicorecomm.com
- www.unicorecomm.com
Dokumenty / zdroje
 |
Unicore Comm UM220-INS Multi-GNSS integrovaný modul navigácie a určovania polohy [pdfPoužívateľská príručka UM220-INS Multi-GNSS integrovaný navigačný a polohovací modul, UM220-INS, Multi-GNSS integrovaný navigačný a polohovací modul, navigačný a polohovací modul, polohovací modul |



