היסטוריית גרסאות
| גִרְסָה | עדכון הִיסטוֹרִיָה | תַאֲרִיך |
| R1 | מהדורה ראשונית | פברואר 2020 |
| R1.1 | SNRSTAT: עדכן את התיאור של InstallState | יוני 2020 |
| R1.2 | 2.2 תכונות עיקריות: הוסף וחדד את המפרט | אוגוסט 2020 |
| R1.3 | הוסף פרמטרים בסעיף 2.25.1: הוסף הערות שימוש במודול | אוקטובר 2020 |
| R1.4 | הוסף את התיאור של סטנסיל SMT | יוני 2021 |
| R1.5 | עדכן את ספק הכוח VCC ו-V_BCKP | אוגוסט 2021 |
| R1.6 | הוסף את ההערה בסעיף 5.2 | 2021 בנובמבר |
| R1.7 | אם לא נעשה שימוש בהתחלה חמה, חבר את V_BCKP ל-VCC. שבב GNSS מוסמך לפי AEC-Q100. בדוק את VSWR בסעיף 2.2 | 2022 בנובמבר |
זְכוּת יְוֹצרִים
© זכויות יוצרים 2009-2022 Unicore Communications, Inc. כל הזכויות שמורות. אין לשכפל או לשדר אף חלק ממסמך זה בכל צורה או אמצעי, אלקטרוני או מכני, לרבות צילום והקלטה, לכל מטרה ללא אישור מפורש בכתב מבעל זכויות היוצרים.
כתב ויתור
התוכן של מסמך זה כפוף לעדכון ללא הודעה מוקדמת עקב התקדמות מתמשכת במתודולוגיה, עיצוב וייצור, ואינם מייצגים התחייבות מצד Unicore Communications, Inc. המידע הכלול במדריך זה נחשב נכון ונכון בזמן הפרסום.
המוצר נגמרview
תְחוּם
מסמך זה מתאר את המידע על החומרה, ההתקנה, המפרט והשימוש במוצרי סדרת UNICORECOMM UM220-INS.
קהל
מסמך זה נועד להציג אוברview של מוצרי סדרת UNICORECOMM UM220-INS. הקהל צפוי להחזיק במומחיות על מקלטי GNSS.
מָבוֹא
תיאור המוצר
מוצרי סדרת UM220-INS (כולל UM220-INS NL, UM220-INS NF) הם מודולי מערכת כפולה של GNSS+MEMS המיועדים לניווט ברכב המבוססים על UNICORECOMM GNSS SoC עם הספק נמוך – UFirebird (UC6226). עם ה-MEMS המובנה בששת הצירים, ותמיכה במיקום משותף רב-מערכתי או מיצוב עצמאי של מערכת אחת, מוצר מסדרת UM220-INS יכול להפיק תוצאת מיקום אינרציאלי GNSS+MEMS באופן רציף אפילו במנהרות ובמוסכים תת-קרקעיים.
שבב GNSS במודול UM220-INS מוסמך לפי AEC-Q100, ותהליך הייצור תואם ל-IATF 16949.

איור 2-1 מודולים מסדרת UM220-INS (צד שמאל: UM220-INS NL, צד ימין: UM220-INS NF)
מדריך למשתמש של מודולים מסדרת UM220-INS
|
גִרְסָה אַחֶרֶת |
צִיוּן | מַעֲרֶכֶת* | מִמְשָׁק | נְתוּנִיםלְעַדְכֵּן קֶצֶב* | ||||||
| מִקצוֹעִי | רכב | GPS | BDS* | GLONASS* | גלילאו | QZSS | UART1 | UART2 | ||
| UM220-INS NL | ● | ● | ● | ● | ● | ● | ● | ● | 1 הרץ | |
| UM220-INS NF | ● | ● | ● | ● | ● | ● | ● | ● | 1 הרץ | |
מודולים מסדרת UM220-INS תומכים במצבי מיקום מרובים, כולל מיקום משותף ומיקום עצמאי:
- GPS L1+SBAS+QZSS
- GPS+GLONASS+Galileo+SBAS+QZSS
- GPS+BDS+Galileo+SBAS+QZSS (מצב ברירת מחדל)
- BDS
QZSS ו-SBAS זמינים רק כאשר GPS מופעל
- מערכת BDS לא יכולה לפעול במקביל למערכת GLONASS.
- קצב עדכון הנתונים המוגדר כברירת מחדל של המודול הוא 1Hz, שניתן להגדיר ל-10Hz.
תכונות מפתח
| כּוֹחַ | |
| כרך ידtage | +3.0V~3.6V VDC |
| צריכת חשמל 1 | 90mW |
| RF קֶלֶט | |
| תֶדֶר | 1559~1605 מגה-הרץ |
| קלט VSWR | ≤2.5 |
| עכבת קלט | 50Ω |
| אנטנת רווח | 15~30dB |
| דמויות פיזיות | |
| מֵמַד | 16.0 מ"מ*12.2 מ"מ*2.6 מ"מ |
| סְבִיבָה | |
| טמפרטורת הפעלה | -40℃ ~ +85℃ | |||||
| טמפרטורת אחסון | -45℃ ~ +90℃ | |||||
| קלט / תְפוּקָה נְתוּנִים מִמְשָׁק | ||||||
| UART | UART*2, LVTTL.Baud קצב: 4800~460800bps | |||||
| GNSS ביצועים | ||||||
|
תֶדֶר |
BDS B1: 1561.098MHz GPS L1: 1575.42MHzGLONASS L1: 1602+0.5625*k (MHz)
גלילאו E1: 1575.42 מגה-הרץ |
|||||
|
TTFF (זמן לתיקון ראשון) |
GPS+GLO+GA | GPS+BD+GA | ||||
| Cold Start Hot Start Reacquisition AGNSS | שנות ה-30 שנות ה-1 שנות ה-1 שנות ה-5 | שנות ה-30 שנות ה-1 שנות ה-1 שנות ה-5 | ||||
| דיוק מיקום 2 | GPS+GLO+GA | GPS+BD+GA | ||||
| 2m | 2m | |||||
| דיוק מהירות (RMS) | GPS+GLO+GA | GPS+BD+GA | ||||
| 0.02 מטר/שניה | 0.01 מטר/שניה | |||||
|
רְגִישׁוּת |
GPS+GLO+GA | GPS+BD+GA | BD | GPS | GLO | |
| מַעֲקָב | -161dBm | -161dBm | -159dBm | -161dBm | -158dBm | |
| רְכִישָׁה | -147dBm | -147dBm | -144dBm | -147dBm | -142dBm | |
| התחל חם | -154dBm | -154dBm | -149dBm | -154dBm | -148dBm | |
| רכישה מחדש | -157dBm | -157dBm | -156dBm | -157dBm | -153dBm | |
| שגיאת מיקום DR | טיפ. 3% מהמרחק שנסע עם ה-GNSS outage | |||||
| תדירות אות דופק זמן | 1 הרץ | |||||
| קצב ניווט מרבי (קצב מדידה) | 10 הרץ | |||||
| חביון ניווט | 100ms נומינלי | |||||
| קצב פלט של הודעת מדידת חיישן מקסימלית | 10 הרץ |
| דיוק אות דופק זמן | RMS 30ns (GPS+BD) 99% 50ns (GPS+BD) |
| פלט נתונים 3 | NMEA 0183, פרוטוקול Unicore |
|
גבולות תפעוליים |
דינמיקה ≤ 4 גרם גובה 50000 מטר מהירות 515 מטר לשנייה |
ממשקים

UART
מודולים מסדרת UM220-INS תומכים בשתי יציאות UART הניתנות להגדרה. COM1 היא היציאה הטורית הראשית, התומכת בהעברת נתונים ופונקציית שדרוג קושחה, קלט/פלט האות הוא LVTTL. ברירת המחדל של קצב הביאוד הוא 115200bps, וניתן להגדיר אותו עד 460800bps. ודא ש-COM1 מחובר למחשב או למעבד חיצוני לצורך שדרוגי קושחה. COM2 מוגבל לתמיכה בהעברת נתונים, ולא ניתן להשתמש בו לשדרוג קושחה.
מד מרחק (FWD/WHEELTICK)
למודולים מסדרת UM220-INS יש ממשק קלט של מד מרחק הכולל FWD ו-WHEELTICK, אשר שימושיים לשיפור דיוק המיקום של המודול.
MEMS
מודולים מסדרת UM220-INS משלבים MEMS עם שישה צירים, ג'ירו תלת צירים ומאיץ שלושה צירים. MEMS מספקת מידע על שינויי גישה ומהירות של הספק, המשולבים עם GNSS לביצוע חישוב ניווט משולב. שילוב זה מבטיח מיקום הרבה יותר רציף וללא הפרעות מאשר GNSS עצמאי, במיוחד בתנאים עם אות גרוע.
1PPS
מודולים מסדרת UM220-INS פלט 1 PPS עם רוחב פולס וקוטביות מתכווננים. 1PPS אינו מיועד ליישום תזמון.
אִתחוּל
כרך נמוךtage חוקי, והזמן הפעיל נדרש להימשך לפחות 10ms
התקנת מערכת
דרישות מוקדמות
מודולים מסדרת UM220-INS הם מכשירים רגישים אלקטרוסטטיים (ESD) ויש להתקין אותם עם אמצעי זהירות מיוחדים בעת הטיפול. פעולה לא נכונה עלולה לגרום לנזק לרכיבים.
- בצע את השלבים בסעיף 3.2 בסדר הנכון.
- פריקה אלקטרוסטטית (ESD) עלולה לגרום לנזק למכשיר. כל הפעולות המוזכרות בפרק זה צריכות להתבצע על שולחן עבודה אנטי סטטי, באמצעות צמיד אנטי סטטי ורפידת קצף מוליכה. אם שולחן העבודה האנטי-סטטי אינו זמין, עונד רצועת יד אנטי-סטטית וחבר את הקצה השני למסגרת מתכת כדי למלא תפקיד באנטי-סטטי.
- החזק את קצה המודול, ואל תיגע ברכיבים של המודול.
- אנא בדוק היטב אם המודול רופף או פגום. אנא צור איתנו קשר או עם המשווק המקומי לכל בעיה.
איור 3-1 מציג את ההתקנה האופיינית של מודולים מסדרת UM220-INS עם חבילות EVK.

אנא בדוק היטב את תכולת החבילה לאחר קבלת חבילת המודולים מסדרת UM220-INS.
- חבילת UM220-INS EVK (עם מתאם AC)
- מדריך למשתמש של מודול סדרת UM220-INS
- חבילת יישום UNICORECOMM uSTAR
- אנטנה מוסמכת התומכת ב-GPS L1 ו-BDS B1/GLONASS L1
- כבל טורי ישיר ו-USB
- מחשב או מחשב נייד עם יציאות טוריות (Windows 7 ומעלה)
נא לשמור את הקופסאות ושקיות הפלסטיק האנטי סטטיות לאחסון וטיפול
התקנת מערכת
בצע את השלבים שלהלן כדי להתקין את המודול:
- שלב 1: הקפד לבצע אמצעים אנטי-סטטיים מלאים, כגון רצועת יד אנטי-סטטית, הארקה של שולחן העבודה;
- שלב 2: פתח את ערכת ההערכה UM220-INS;
- שלב 3: בחר את אנטנת GNSS עם רווח מתאים, תקן אותה באזור שאינו חסום, באמצעות הכבל המתאים לחיבור האנטנה ל-UM220-INS EVK;
- שלב 4: חבר את המחשב ליציאה טורית EVK דרך הכבל הטורי;
- שלב 6: פתח את תוכנת uSTAR במחשב האישי;
- שלב 7: הגדר את המקלט באמצעות uSTAR כדי להציג קבוצות כוכבים view, הודעות יומן, וסטטוס מקלט וכו'.
מפרט טכני
מפרט חשמל
דירוג מרבי מוחלט
| פָּרִיט | מינימום | מקסימום | יְחִידָה | תֵאוּר |
| ספק כוח (VCC) | -0.5 | 3.6 | V | כוח עיקרי |
| כרך גיבויtagה (V_BCKP) | -0.5 | 3.6 | V | ספק כוח גיבוי עבור RTC |
| IO דיגיטלי (RXD1, RXD2)4 | -0.5 | 3.6 | V | כרך ידtage של פיני האות הדיגיטליים |
| RF_IN | – | +3 | dBm | כוח כניסה מקסימלי של אנטנה |
| טמפרטורת אחסון TSTG | -45 | 90 | מעלות צלזיוס | טמפרטורת אחסון |
| טמפרטורת זרימה חוזרת SMT TSLDR | – | +260 | מעלות צלזיוס | טמפרטורת הלחמה |
מצב פעולה
| פָּרִיט | פִּין | מינימום | טיפוסי עֵרֶך | מקסימום | חַד t | מַצָב |
| ספק כוח (VCC) | Vcc | 3.0 | 3.3 | 3.6 | V | |
| אדווה כרךtage | Vp-p | 50 | mV | |||
| שיא זרם | Iccp | 52 | mA | Vcc=3.0 V | ||
| מעקב אחר זרם ממוצע | IACQ | 28 | 30 | 32 | mA | Vcc=3.0V |
| קלט רמה נמוך כרךtage | VIL | -0.3 | 0.2*Vcc | V | ||
| קלט ברמה גבוהה כרךtage | VIH | 0.7*Vcc | Vcc+0.3 | V | ||
| פלט פלט ברמה נמוכה כרךtage | כרך | 0 | 0.4 | V | Iout=-2mA | |
| פלט ברמה גבוהה כרךtage | VOH | Vcc–0.4 | Vcc | V | Iout=2 mA | |
| חיזוק אנטנה5 | GANT | 15 | 20 | 30 | dB | |
| איור רעש | NF | 1.9 | dB | |||
| טמפרטורת הפעלה | ל - PR | -40 | +85 | מעלות צלזיוס |
כולל איפוס, TIMEPULSE, WHEELTICK, TXD2, RXD2, FWD, TXD1, RXD1 טווח ההגברה של האנטנה מתייחס לטווח ההגברה של הקדםampliifier לפני RF_IN של המודול.
מידות
| סֵמֶל | מינימום (מ"מ) | טיפוסי (מ"מ) | מקסימום (מ"מ) |
| A | 15.9 | 16.0 | 16.5 |
| B | 12 | 12.2 | 12.4 |
| C | 2.4 | 2.6 | 2.8 |
| D | 0.9 | 1.0 | 1.3 |
| E | 1.0 | 1.1 | 1.2 |
| F | 2.9 | 3.0 | 3.1 |
| G | 0.9 | 1.0 | 1.3 |
| H | 0.9 | 1.0 | 1.1 |
| K | 0.7 | 0.8 | 0.9 |
| N | 0.4 | 0.5 | 0.6 |
| M | 0.8 | 0.9 | 1.0 |

הגדרת סיכה (למעלה View)
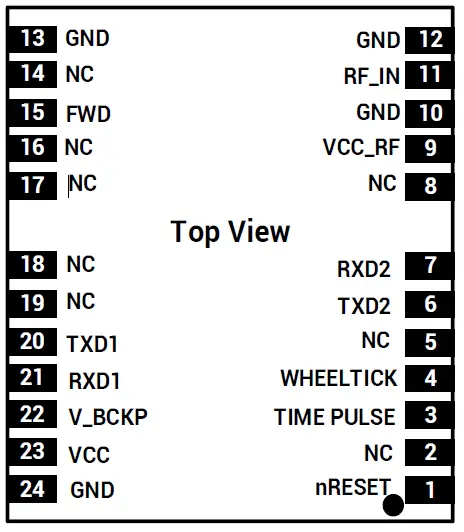
| פִּין לֹא | שֵׁם | I/O | חַשׁמַלִי רָמָה | תֵאוּר |
| 1 | nRESET | I | LVTTL | ResetLow פעיל, עוקף אם אינו בשימוש |
| 2 | NC | – | – | שָׁמוּר |
| 3 | TIMEPULSE | O | LVTTL | דופק זמן (1PPS) |
|
4 |
WHEELTICK |
I |
LVTTL |
דופק מהירות מד מרחק, עוקף אם אינו בשימוש. מומלץ מאוד להשתמש, תדר הפולס המרבי המקובל הוא 5KHz, ורוחב הפולס המינימלי גדול מ-100us.הערה: אותות שגויים של מד המרחק יובילו לבעיות חמורות בשימוש במוצר. נא לוודא שהאות נכון. |
| 5 | NC | – | – | שָׁמוּר |
| 6 | TXD2 | O | LVTTL | UART 2-TX |
| 7 | RXD2 | I | LVTTL | UART 2-RX |
| 8 | NC | – | – | שָׁמוּר |
| 9 | VCC_RF | O | פלט הזנת אנטנה | |
| 10 | GND | – | – | טָחוּן |
| 11 | RF_IN | I | – | כניסת אות GNSS |
| 12 | GND | – | – | טָחוּן |
| 13 | GND | – | – | טָחוּן |
| 14 | NC | – | – | שָׁמוּר |
| פִּין לֹא | שֵׁם | I/O | חַשׁמַלִי רָמָה | תֵאוּר |
|
15 |
FWD |
I |
LVTTL |
קלט כיוון מד מרחק, עוקף אם אינו בשימוש. מומלץ מאוד להשתמש ברמה גבוהה=קדימה רמה נמוכה=לאחור
הערה: אותות שגויים של מד המרחק יובילו לבעיות חמורות בשימוש במוצר. נא לוודא שהאות נכון. |
| 16 | NC | – | – | שָׁמוּר |
| 17 | NC | – | – | שָׁמוּר |
| 18 | NC | – | – | שָׁמוּר |
| 19 | NC | – | – | שָׁמוּר |
| 20 | TXD1 | O | LVTTL | UART 1-TX |
| 21 | RXD1 | I | LVTTL | UART 1-RX |
|
22 |
V_BCKP |
I |
1.65V~3.6V |
כרך גיבויtagאספקה, רלוונטית להתחלה חמה. אם אינך משתמש בפונקציית ההתחלה החמה, חבר את V_BCKP ל-VCC. אל תחבר אותו לאדמה ואל תשאיר אותו צף. |
| 23 | VCC | – | 3.0V~3.6V | אספקה כרךtage |
| 24 | GND | – | – | טָחוּן |
אריזת PCB

בתכנון של הלחמת PCB, ודא שהאזור שמתחת למודולים מסדרת UM220-INS מכוסה במלואו בשכבת הלחמה.
עיצוב חומרה
עיצוב בשיקולים
יש צורך לחבר את האותות הבאים בצורה נכונה כדי לגרום למודולים מסדרת UM220-INS לפעול כהלכה. מודול ה-VCC הוא בעל מונוטוניות טובה, ונדרשים להבטיח צלצול נמוך בטווח של 5% VCC. אם VCC כבוי ואז מופעל מחדש, זמן הכיבוי חייב להיות גדול מ-10ms. אם ספק כוח VCC אינו יכול לעמוד בדרישות לעיל, קיימת סבירות שמודול UM220-INS לא יתחיל כרגיל. כאשר המודול אינו מופעל, יש צורך לוודא שספק הכוח וה-GPIO (PPS, TX, RX, RESET) נמצאים במצב עכבה גבוהה או ברמה נמוכה כדי למנוע פעולה חריגה של המודול הנגרמת על ידי דליפה.
אם נעשה שימוש ביציאה טורית 2 ובפולס לשנייה (1PPS), יש לחבר נגד 1KΩ בסדרה ב-TXD2 ויש לחבר נגד 4.7KΩ בטור בפולס לשנייה (1PPS)
- חבר את כל פיני GND לאדמה.
- ספק כוח אמין לפין VCC.
- חבר את אות RF_IN לאנטנה, וודא שהעכבה של 50 Ω תואמת במעגל.
- ודא ש-COM1 מחובר למחשב או למעבד חיצוני, משתמשים יכולים להשתמש ביציאה טורית זו כדי לקבל נתוני מיקום. COM1 משמש גם עבור שדרוגי קושחה.
שימו לב לפריטים הבאים בעיצוב כדי להשיג ביצועים טובים
- ספק כוח: כוח אדוות יציב ונמוך הכרחי לביצועים טובים.
- השתמש ב-LDO כדי להבטיח את טוהר אספקת החשמל.
- מקם את LDO למודול קרוב ככל האפשר בפריסה.
- הרחב את חיווט מעגל החשמל או השתמש במשטח יציקת נחושת כדי להעביר זרם.
- הימנע מהליכה דרך כל מכשיר בעל הספק גבוה או השראות גבוהה כגון סליל מגנטי.
- ודא שנפח שיא לשיאtagהאדוות לא עולה על 50mV.
- ממשקי UART: ודא שהאותות וקצב ההבאה של הציוד הראשי תואמים לזה של מודולים מסדרת UM220-INS.
- ממשק אנטנה: ודא שעכבת האנטנה תואמת, והמעגל קצר וחלק, נסו להימנע מזווית חדה.
- נסה להימנע ממעגלים מתחת למודולים מסדרת UM220-INS.
- מודול זה הוא מכשיר רגיש לטמפרטורה, שינויי טמפרטורה מהירים יגרמו להפחתת הביצועים, הרחיקו אותו ככל האפשר מכל מכשירי אוויר וחימום בעלי הספק גבוה בטמפרטורה גבוהה.
אַנטֶנָה
אם מודולים מסדרת UM220-INS משתמשים באנטנה פעילה של +3V, מומלץ להשתמש בפין VCC_RF כדי להזין את האנטנה דרך משרן ההזנה.

פֶּתֶק: אם למשתמש יש דרישה גבוהה ל-ESD (> ± 2000 V), על המשתמש לשקול שיטה אחרת להזנת האנטנה במקום להשתמש בפין VCC_RF. במקרה זה, מומלץ לבחור שבב ספק כוח עם רמת הגנה גבוהה על ESD. ניתן להשתמש גם בצינור פריקת גז, וריסטור, צינור TVS והתקני הגנה בעלי הספק גבוה אחרים במעגל אספקת החשמל כדי להגן עוד יותר על המודול מפני נזקי ESD או מתח יתר חשמלי אחר (EOS). אם המודולים מסדרת UM220-INS משתמשים באנטנה פעילה שאינה +3V, נפח ההטיהtagה-V_BIAS הנדרש על ידי האנטנה משמש להפעלת האנטנה דרך משרן ההזנה.

אם המודולים מסדרת UM220-INS משתמשים באנטנה פסיבית, חבר את האנטנה ישירות ל-RF_IN, וניתן להשאיר את VCC_RF צף. יש לציין שבהשוואה לאנטנות אקטיביות, השימוש באנטנות פסיביות עלול לגרום לפגיעה בביצועי GNSS.

יציאה טורית
היציאות הטוריות של מודולים מסדרת UM220-INS הן ברמת LVTTL, השתמשו בממיר RS232 לחיבור למחשב.

חיבור מד מרחק
מודולים מסדרת UM220-INS תומכים באותות של כיוון (FWD) ודופק מהירות (WHEELTICK) המתחברים עם מד מרחק. ניתן לשפר את הדיוק של מסלול מיקום המודול אם המודול ישיג אותות דופק כיוון ומהירות יעילים. אות מד המרחק של כלי רכב הוא בדרך כלל 12V, ואיכות האות ירודה. לכן, סינון אותות, בידוד מצמד אופטו והמרת רמה נדרשים כדי שאותות מד המרחק של הרכב יועברו ל-UM220-INS NF לשימוש.

קואורדינטות מערכת
הקואורדינטות של מודולים מסדרת UM220-INS חייבות להיות עקביות עם זו של כלי הרכב, אחרת עליך לבצע את התצורה הקשורה בעקבות הפקודה CFGROTAT במדריך הפרוטוקול המתאים.


- הכיוון התקין של המגן הוא ציר Z, הציר הארוך הוא Y והציר הקצר הוא X.
- הקואורדינטה של המודול חייבת להיות עקבית עם זה של הרכב, כלומר: ציר X וציר R מקבילים באותו כיוון, ציר Y וציר F מקבילים באותו כיוון, וציר Z ו-U- הציר מקביל באותו כיוון.
התקנה של המודול
מודולים מסדרת UM220-INS חייבים להיות מחוברים בצורה נוקשה לגוף הרכב ומקובעים היטב.
- יש להתקין את האנטנה כשהחזית פונה כלפי מעלה ככל האפשר ולקבוע היטב; ודא שזווית הגובה של הסביבה שבה נמצאת האנטנה גדולה מ-15° והחלל אינו חסום.
- בסביבה שבה האנטנה ממוקמת, אין מקור הפרעה חזק בתדר של 1568±20MHz.
הוראות התקנה
המודולים מסדרת UM220-INS חייבים להיות מחוברים היטב לרכב כדי למנוע קיזוזים או רעידות בין המודול לרכב. אין להתקין מודולים מסדרת UM220-INS בחלק המתלה של הרכב (עם חלק אלסטי). כאשר הרכב בתנועה, כל שינוי במערכת הקואורדינטות של הרכב ישפיע באופן רציני על מודול UM220-INS וימנע ממנו לפעול כרגיל.
הגדרת זווית התקנה
קואורדינטת הרכב היא RFU, וקואורדינטת המודול היא xyz, כפי שמוצג באיור 5-5 ובאיור 5-6. AngleR, angleF ו-angleU של זווית ההתקנה של המודול מוגדרות כדלקמן:
- חופף את המצב ההתחלתי של קואורדינטת RFU לזה של קואורדינטת xyz
- סובב את זווית γ של המודול לאורך ציר z
- סובב את זווית α של המודול לאורך ציר ה-x החדש
- סובב את זווית β של המודול לאורך ציר ה-y החדש
- המודול נמצא כעת באותו מצב כמו ההתקנה בפועל, עם זאת, angleR=α, angleF=β, angleU=γ

אפשרויות התקנה של המודול
- התקנה חינם (מצב ברירת מחדל)
מודולים מסדרת UM220-INS משלבים גירוסקופ תלת צירים ומד תאוצה תלת צירים, עם אלגוריתם כיול עצמי מובנה, התומך בהתקנה חופשית של המודול ביחס לכל זווית התקנה של מערכת הקואורדינטות ברכב, כגון , ההתקנה האופקית לחלוטין, התקנה משופעת בזווית מסוימת, והתקנת היפוך. - התקנה קבועה
על פי הגדרת זווית ההתקנה, זווית ההתקנה המדויקת מוגדרת ידנית במודול. שיטת התקנה זו לוקחת זמן כיול קצר. בעת הגדרת זווית ההתקנה באופן ידני, שגיאת הזווית המקסימלית מוגבלת ל-± 5 מעלות.
הודעות עזר
CFGROTAT
- פורמט הודעה: $ CFGROTAT,angleR, angleF, angleU, mode
- תֵאוּר: הגדר או פלט את תצורות זווית ההתקנה של המודול ביחס למערכת הקואורדינטות של הרכב.
- פרמטרים:
- angleR, angleF ו- angleU, עיין ב-5.6.2 לפרטים עם היחידה של 0.01°
- מצב, המייצג את מצב תצורת זווית ההתקנה:
0 - מצב התקנה כללי, ערך הקלט של זווית ההתקנה גס יחסית (בתוך 10 מעלות)
2 - מצב התקנה אוטומטי, אין צורך בזווית התקנה.
הֶעָרָה
- בחר 2 עבור מצב התקנה חופשי ו-0 עבור התקנה קבועה;
- הזן את זוויות ההתקנה בפועל כולל angleR, angleF ו- angleU למודול. לאחר השלמת התצורה, שמור את התצורה בפלאש באמצעות הפקודה CFGSAVE, אחרת צריך לזהות אותה שוב באתחול הבא.
- כל תצורה ב-INS תגרום לאתחול מחדש של מודול ה-INS במהלך פעולה רגילה או לאחר כיבוי והפעלה מחדש, ופעולות הכיול שהושלמו קודם לכן או המתמשכות יאופסו.
SNRSTAT
- פורמט הודעה: $SNRSTAT,insstatus,odostatus, InstallState, Mapstat
- תֵאוּר: מצב התחלתי של פלט (מתאים הן למצב התקנה קבועה והן למצב התקנה חופשית)
- פרמטרים:
insstatus: מצב ראשוני של INS- 1: כשל בהתקן IMU
- 0: מושבת
- 1: אתחול
- 2: זווית ההתקנה ידועה
- 3: האתחול הושלם
odostatus: מצב אתחול מד מרחק - 1: כשל בהתקן מד מרחק
- 0: מושבת
- 1: אתחל את גורם הסולם
- 2: אתחול גורם קנה המידה הושלם
- 3: כיול גורם קנה המידה הושלם
- InstallState
- כשל בהתקן IMU, אין אפשרות להעריך את זווית ההתקנה
- בהתקדמות הכיול
- האיכות הנוכחית של מידע הלוויין אינה מספקת ונדרשים תנאי לוויין טובים יותר
- תנאי התמרון הנוכחיים של המוביל אינם מספיקים ונדרש להאיץ אותו
- המהירות הנוכחית של הספק נמוכה מדי ונדרשת להגביר אותה.
- Mapstat:
- לא מוגדרת יציאה טורית להזנת פרטי MAP
- לא מתקבלות הודעות MAP על ידי היציאה הטורית או שהודעת ה-MAP שנשלחה בפסק זמן
- מידע MAP מתקבל אך אינו מוחל על הניווט המשולב
- מידע MAP מתקבל ומוחל על הניווט המרוכב
- מבחן התקנה חינם לחלוטין
- התקן את המודול באופן חופשי לחלוטין
- הזן את הפקודה $CFGROTAT,0,0,0,2 (לא נדרשת תצורה עבור מצב היצרן)
- הזן את הפקודה $CFGSAVE (לא נדרשת תצורה עבור מצב היצרן)
- תהליך הכיול העצמי צריך לעמוד בתנאים הנ"ל של חניה, איכות לוויין ותמרון וכו'. אשר אם הכיול העצמי הושלם באמצעות פלט $SNRSTAT, וכאשר הסטטוס הופך ל-3, הכיול העצמי הושלם.
- ודא שהכיול העצמי הושלם ואז היכנס לכביש עם איכות לוויין ירודה.
- אם יש צורך בפונקציה של הפעלה חמה במרתף, Vbackup דורש הפעלה רציפה;
כיול מודול והודעה
כיול עצמי
לאחר התקנת המודולים מסדרת UM220-INS, נדרש כיול עצמי כדי להבטיח את הדיוק של פלט המודול. בתהליך הכיול העצמי, המודול מעריך את פרמטרי מצב ההתקנה ואת פרמטרי החיישן. המודול נמצא במצב ניווט לווייני מלא לפני השלמת הכיול העצמי, ונמצא במצב קומפקטי ניווט לווייני וניווט אינרציאלי לאחר השלמת הכיול העצמי.
תנאים להשלמת כיול עצמי
- הכיול העצמי מופעל לאחר הפעלת החשמל, עצור למשך יותר משלוש דקות;
- נדרשת נראות לוויינית טובה במהלך תהליך הכיול העצמי (מספר הלוויינים הנראים אינו פחות משישה, ו-CN0 הוא מעל 30dB), ככל שאיכות תצפית הלוויין טובה יותר, הכיול יהיה מהיר יותר.
- זה נדרש לבצע תמרוני סיבוב של 90 מעלות במשך יותר מחמש פעמים בזמן שהרכב פועל כרגיל.
- שמור על מהירות נסיעה קדימה מעל 36 קמ"ש תחת ההנחה של נהיגה רגילה. ככל שזמן הנסיעה יהיה ארוך יותר (מומלץ לנהוג בתאוצה העולה על 0.5 מ' לשנייה בריבוע במשך לא פחות מפי 10) וככל שזמן הנסיעה ארוך יותר, הכיול יהיה מהיר יותר. לאחר היישור הראשון של ניווט אינרציאלי ( insstatus 3), עדיין יש צורך לנסוע כ-15 דקות בסביבה הפתוחה הרגילה כדי לאמן את מכשיר הניווט האינרטי בצורה נאותה. למשלampאבל, דיוק הניווט עשוי להיות מעט גרוע יותר אם מכשיר הניווט האינרטי נכנס לסביבה מורכבת כגון מנהרה ומוסך מיד לאחר היישור הראשון.
פֶּתֶק
- השימוש הרגיל במודול דורש רק תהליך כיול עצמי אחד.
- לאחר כיול מודול INS, ניתן להזיז אותו רק לאחר ניתוק מוחלט של החשמל, כולל ה-VCC הראשי ו-V_BACKUP הגיבוי.
פירוק
כאשר יש צורך להסיר את המודול, מומלץ להמיס את פח ההלחמה של הפינים משני צידי המודול בעזרת מלחם חשמלי ולהסיר את המודול בפינצטה. אל תשתמש באמצעים אחרים כדי להסיר את המודול (למשלampאבל, המודול מפוצץ על ידי אקדח אוויר חם), מה שעלול להוביל לנזק למודול.
חֲבִילָה
תיוג מוצרים

תיאור החבילה
המודולים מסדרת UM220-INS משתמשים בסרט נשא וסליל (מתאים לציוד הרכבה משטח מיינסטרים), ארוזים בשקיות אנטי-סטטיות רדיד אלומיניום אטומות בוואקום, עם חומר ייבוש בפנים כדי למנוע לחות. בעת שימוש בתהליך ריתוך חוזר לריתוך מודולים, נא לעמוד בקפדנות בתקן IPC כדי לבצע בקרת לחות על מודולים. מכיוון שחומרי אריזה כגון חגורת נשיאה יכולים לעמוד רק בטמפרטורה של 65 מעלות צלזיוס, מודולים יוסרו מהאריזה במהלך האפייה.

| פָּרִיט | תֵאוּר |
| מודול | 500 תמונות/סליל |
|
גודל סליל |
מגש: 13 אינץ'
קוטר חיצוני: 330 מ"מ, קוטר פנימי: 100 מ"מ, רוחב: 24 מ"מ עובי: 2.0 מ"מ |
| סרט נשא | רווח בין: 20 מ"מ |
מודולים מסדרת UM220 I NS מדורגים ברמה MSL 3, עיין בתקני IPC/JEDEC הרלוונטיים לדרישות אפייה. נא לגשת אל webאֲתַר www.jedec.org להורדה לפרטים. חיי המדף של מודולים מסדרת UM220 INS הם שנה אחת.
לְנַקוֹת
אל תשתמש באלכוהול או בממיסים אורגניים אחרים לניקוי, אחרת זה עלול להוביל לשאריות שטף לתוך מעטפת המיגון, ולגרום לטחב ולבעיות אחרות.
הזרמת הלחמה
על מנת למנוע נפילת המכשיר, יש למקם את המודול בחלק העליון של הלוח הראשי במהלך הריתוך. עקומת טמפרטורת הלחמה חוזרת מומלצת כפי שמוצג באיור 9 1 להלן (מומלץ עבור משחת הלחמה M 705 GRN 360).
פֶּתֶק: ניתן לרתך את המודול פעם אחת בלבד.

פֶּתֶק: הפתחים בשבלונה צריכים לעמוד בדרישות העיצוב ובמפרטי הבדיקה של הלקוח עצמו, ועובי השבלונה צריך להיות מעל 0.15 מ"מ, ומומלץ 0.18 מ"מ.
Unicore Communications, Inc.
F3, No.7, Fengxian East Road, Haidian, Beijing, PRChina, 100094
- www.unicorecomm.com
- טֵלֵפוֹן: 86-10-69939800
- פַקס: 86-10-69939888
- info@unicorecomm.com
- www.unicorecomm.com
מסמכים / משאבים
 |
Unicore Comm UM220-INS Multi-GNSS מודול ניווט ומיקום משולב [pdfמדריך למשתמש UM220-INS מודול ניווט ומיקום משולב רב-GNSS, UM220-INS, מודול ניווט ומיקום משולב רב-GNSS, מודול ניווט ומיקום, מודול מיקום |



