পুনর্বিবেচনার ইতিহাস
| সংস্করণ | রিভিশন ইতিহাস | তারিখ |
| R1 | প্রাথমিক সংস্করণ | ফেব্রুয়ারী 2020 |
| R1.1 | SNRSTAT: InstallState এর বিবরণ আপডেট করুন | জুন 2020 |
| R1.2 | 2.2 মূল বৈশিষ্ট্য: স্পেসিফিকেশন যোগ করুন এবং পরিমার্জন করুন | আগস্ট 2020 |
| R1.3 | বিভাগ 2.25.1 এ পরামিতি যোগ করুন: মডিউল ব্যবহারের নোট যোগ করুন | অক্টোবর 2020 |
| R1.4 | SMT স্টেনসিলের বর্ণনা যোগ করুন | জুন 2021 |
| R1.5 | পাওয়ার সাপ্লাই VCC এবং V_BCKP আপডেট করুন | আগস্ট 2021 |
| R1.6 | বিভাগ 5.2-এ নোট যোগ করুন | নভেম্বর 2021 |
| R1.7 | যদি হট স্টার্ট ব্যবহার না করা হয় তবে V_BCKP কে VCC এর সাথে সংযুক্ত করুন। AEC-Q100 অনুযায়ী GNSS চিপ যোগ্য। বিভাগ 2.2-এ VSWR সংশোধন করুন | নভেম্বর 2022 |
কপিরাইট
© কপিরাইট 2009-2022 Unicore Communications, Inc. সর্বস্বত্ব সংরক্ষিত৷ কপিরাইট মালিকের স্পষ্ট লিখিত অনুমতি ব্যতিরেকে এই দস্তাবেজের কোন অংশ যেকোন উদ্দেশ্যে পুনরুত্পাদন বা প্রেরিত করা যাবে না যে কোন আকারে বা কোন উপায়ে, ফটোকপি এবং রেকর্ডিং সহ ইলেকট্রনিক বা যান্ত্রিক।
দাবিত্যাগ
পদ্ধতি, নকশা এবং উৎপাদনে ক্রমাগত অগ্রগতির কারণে এই নথির বিষয়বস্তু নোটিশ ছাড়াই সংশোধন সাপেক্ষে এবং ইউনিকোর কমিউনিকেশনস, Inc-এর পক্ষ থেকে প্রতিশ্রুতি উপস্থাপন করে না। এই ম্যানুয়ালটির মধ্যে থাকা তথ্য সত্য এবং সঠিক বলে মনে করা হয়। প্রকাশের সময়।
পণ্য ওভারview
ব্যাপ্তি
এই নথিতে হার্ডওয়্যার, ইনস্টলেশন, স্পেসিফিকেশন এবং UNICORECOMM UM220-INS সিরিজের পণ্যগুলির ব্যবহারের তথ্য বর্ণনা করা হয়েছে।
শ্রোতা
এই নথি একটি ওভার উপস্থাপন করার উদ্দেশ্যে করা হয়view UNICORECOMM UM220-INS সিরিজের পণ্য। শ্রোতারা জিএনএসএস রিসিভারের উপর দক্ষতা অর্জন করবে বলে আশা করা হচ্ছে।
ভূমিকা
পণ্য বিবরণ
UM220-INS সিরিজের পণ্যগুলি (UM220-INS NL, UM220-INS NF সহ) হল GNSS+MEMS ডুয়াল-সিস্টেম মডিউল যা UNICORECOMM লো পাওয়ার GNSS SoC – UFirebird (UC6226) এর উপর ভিত্তি করে স্বয়ংচালিত নেভিগেশনের জন্য ডিজাইন করা হয়েছে। অন্তর্নির্মিত ছয় অক্ষ MEMS, এবং মাল্টি-সিস্টেম জয়েন্ট পজিশনিং বা একক-সিস্টেম স্বতন্ত্র অবস্থানের সমর্থন সহ, UM220-INS সিরিজের পণ্যটি টানেল এবং ভূগর্ভস্থ গ্যারেজেও ক্রমাগত GNSS+MEMS ইনর্শিয়াল পজিশনিং ফলাফল আউটপুট করতে পারে।
UM220-INS মডিউলের GNSS চিপ AEC-Q100 অনুযায়ী যোগ্য, এবং উৎপাদন প্রক্রিয়া IATF 16949-এর সাথে সঙ্গতিপূর্ণ।

চিত্র 2-1 UM220-INS সিরিজ মডিউল (বাম দিকে: UM220-INS NL, ডান দিক: UM220-INS NF)
UM220-INS সিরিজ মডিউল ব্যবহারকারী ম্যানুয়াল
|
বৈকল্পিক |
গ্রেড | সিস্টেম* | ইন্টারফেস | ডেটাআপডেট হার* | ||||||
| প্রফেশনাল | মোটরগাড়ি | জিপিএস | বিডিএস* | গ্লোনাস* | গ্যালিলিও | QZSS | ইউআরটি 1 | ইউআরটি 2 | ||
| UM220-INS NL | ● | ● | ● | ● | ● | ● | ● | ● | 1Hz | |
| UM220-INS NF | ● | ● | ● | ● | ● | ● | ● | ● | 1Hz | |
UM220-INS সিরিজের মডিউলগুলি যৌথ অবস্থান এবং স্বতন্ত্র অবস্থান সহ একাধিক পজিশনিং মোড সমর্থন করে:
- GPS L1+SBAS+QZSS
- GPS+GLONASS+Galileo+SBAS+QZSS
- GPS+BDS+Galileo+SBAS+QZSS (ডিফল্ট মোড)
- বিডিএস
QZSS এবং SBAS শুধুমাত্র GPS সক্ষম হলেই উপলব্ধ
- BDS সিস্টেম GLONASS সিস্টেমের সাথে সমান্তরালভাবে চলতে পারে না।
- মডিউলটির ডিফল্ট ডেটা আপডেট রেট হল 1Hz, যা 10Hz এ কনফিগার করা যেতে পারে।
মূল বৈশিষ্ট্য
| শক্তি | |
| ভলিউমtage | +3.0V~3.6V ভিডিসি |
| বিদ্যুৎ খরচ 1 | 90mW |
| RF ইনপুট | |
| ফ্রিকোয়েন্সি | 1559~1605MHz |
| ইনপুট VSWR | ≤2.5 |
| ইনপুট প্রতিবন্ধকতা | 50Ω |
| এন্টেনা | 15~30dB |
| শারীরিক চরিত্র | |
| মাত্রা | 16.0 মিমি * 12.2 মিমি * 2.6 মিমি |
| পরিবেশ | |
| অপারেটিং তাপমাত্রা | -40℃ ~ +85℃ | |||||
| স্টোরেজ তাপমাত্রা | -45℃ ~ +90℃ | |||||
| ইনপুট/ আউটপুট ডেটা ইন্টারফেস | ||||||
| UART | UART*2, LVTTL. বড রেট: 4800~460800bps | |||||
| GNSS কর্মক্ষমতা | ||||||
|
ফ্রিকোয়েন্সি |
BDS B1: 1561.098MHz GPS L1: 1575.42MHzGLONASS L1: 1602+0.5625*k (MHz)
গ্যালিলিও E1: 1575.42MHz |
|||||
|
টিটিএফএফ (প্রথম ঠিক করার সময়) |
GPS+GLO+GA | GPS+BD+GA | ||||
| কোল্ড স্টার্ট হট স্টার্ট রিঅ্যাক্যুইজিশন এজিএনএসএস | 30 1 1 5 এর দশক | 30 1 1 5 এর দশক | ||||
| অবস্থান নির্ভুলতা2 | GPS+GLO+GA | GPS+BD+GA | ||||
| 2m | 2m | |||||
| বেগ নির্ভুলতা (RMS) | GPS+GLO+GA | GPS+BD+GA | ||||
| 0.02মি/সেকেন্ড | 0.01মি/সেকেন্ড | |||||
|
সংবেদনশীলতা |
GPS+GLO+GA | জিপিএস+বিডি+GA | BD | জিপিএস | জিএলও | |
| ট্র্যাকিং | -161dBm | -161dBm | -159dBm | -161dBm | -158dBm | |
| অধিগ্রহণ | -147dBm | -147dBm | -144dBm | -147dBm | -142dBm | |
| হট স্টার্ট | -154dBm | -154dBm | -149dBm | -154dBm | -148dBm | |
| পুনঃঅধিগ্রহণ | -157dBm | -157dBm | -156dBm | -157dBm | -153dBm | |
| DR অবস্থান ত্রুটি | টাইপ 3% দূরত্ব GNSS ou দিয়ে ভ্রমণ করেছেtage | |||||
| সময়ের পালস সংকেতের ফ্রিকোয়েন্সি | 1Hz | |||||
| সর্বাধিক নেভিগেশন হার (পরিমাপ হার) | 10Hz | |||||
| নেভিগেশন লেটেন্সি | 100ms নামমাত্র | |||||
| সর্বাধিক সেন্সর পরিমাপ বার্তা আউটপুট হার | 10Hz |
| সময় পালস সংকেত নির্ভুলতা | RMS 30ns (GPS+BD) 99% 50ns (GPS+BD) |
| ডেটা আউটপুট 3 | NMEA 0183, ইউনিকোর প্রোটোকল |
|
অপারেশনাল সীমা |
গতিবিদ্যা ≤ 4g উচ্চতা 50000m বেগ 515m/s |
ইন্টারফেস

UART
UM220-INS সিরিজের মডিউল দুটি কনফিগারযোগ্য UART পোর্ট সমর্থন করে। COM1 হল প্রধান সিরিয়াল পোর্ট, যা ডেটা ট্রান্সফার এবং ফার্মওয়্যার আপগ্রেড ফাংশন সমর্থন করে, সিগন্যাল ইনপুট/আউটপুট হল LVTTL। ডিফল্ট বড রেট হল 115200bps, এবং 460800bps পর্যন্ত কনফিগার করা যেতে পারে। নিশ্চিত করুন যে ফার্মওয়্যার আপগ্রেডের জন্য COM1 একটি PC বা একটি বাহ্যিক প্রসেসরের সাথে সংযুক্ত রয়েছে৷ COM2 ডেটা ট্রান্সমিশন সমর্থন করার জন্য সীমাবদ্ধ, এবং ফার্মওয়্যার আপগ্রেডের জন্য ব্যবহার করা যাবে না।
ওডোমিটার (FWD/WHEELTICK)
UM220-INS সিরিজের মডিউলগুলিতে FWD এবং WHEELTICK সহ একটি ওডোমিটার ইনপুট ইন্টারফেস রয়েছে, যা মডিউলের অবস্থান নির্ভুলতা উন্নত করার জন্য দরকারী।
MEMS
UM220-INS সিরিজের মডিউলগুলি বোর্ডে ছয়-অক্ষের MEMS, তিন-অক্ষের গাইরো এবং তিন-অক্ষের ত্বরণকারীকে একীভূত করে। MEMS ক্যারিয়ারের দৃষ্টিভঙ্গি এবং গতি পরিবর্তনের তথ্য প্রদান করে, যা একটি সম্মিলিত নেভিগেশন গণনা করার জন্য GNSS-এর সাথে মিলিত হয়। এই সংমিশ্রণটি স্বতন্ত্র GNSS-এর তুলনায় অনেক বেশি অবিচ্ছিন্ন এবং নিরবচ্ছিন্ন অবস্থান নিশ্চিত করে, বিশেষ করে দুর্বল সংকেত সহ পরিস্থিতিতে।
1PPS
UM220-INS সিরিজের মডিউলগুলি সামঞ্জস্যযোগ্য পালস প্রস্থ এবং পোলারিটি সহ 1 PPS আউটপুট করে। 1PPS সময় আবেদনের জন্য নয়।
রিসেট করুন
কম ভলিউমtagই বৈধ, এবং সক্রিয় সময় কমপক্ষে 10ms স্থায়ী হতে হবে
সিস্টেম ইনস্টলেশন
পূর্বশর্ত
UM220-INS সিরিজের মডিউলগুলি ইলেক্ট্রোস্ট্যাটিক সংবেদনশীল ডিভাইস (ESD) এবং পরিচালনা করার সময় বিশেষ সতর্কতার সাথে ইনস্টল করা আবশ্যক। অনুপযুক্ত অপারেশন উপাদানগুলির ক্ষতি হতে পারে।
- সঠিক ক্রমে অধ্যায় 3.2 এর পদক্ষেপগুলি সম্পাদন করুন৷
- ইলেক্ট্রোস্ট্যাটিক ডিসচার্জ (ESD) ডিভাইসের ক্ষতির কারণ হতে পারে। এই অধ্যায়ে উল্লিখিত সমস্ত অপারেশন একটি অ্যান্টিস্ট্যাটিক ওয়ার্কবেঞ্চে করা উচিত, একটি অ্যান্টিস্ট্যাটিক রিস্টব্যান্ড এবং একটি পরিবাহী ফোম প্যাড ব্যবহার করে। অ্যান্টিস্ট্যাটিক ওয়ার্কবেঞ্চ উপলব্ধ না হলে, অ্যান্টিস্ট্যাটিক কব্জির স্ট্র্যাপ পরুন এবং অ্যান্টি-স্ট্যাটিক ভূমিকা পালন করার জন্য অন্য প্রান্তটিকে একটি ধাতব ফ্রেমের সাথে সংযুক্ত করুন।
- মডিউলের প্রান্তটি ধরে রাখুন এবং মডিউলের কোনো উপাদান স্পর্শ করবেন না।
- মডিউল স্পষ্টতই আলগা বা ক্ষতিগ্রস্থ কিনা দয়া করে সাবধানে পরীক্ষা করুন। কোনো সমস্যার জন্য আমাদের বা স্থানীয় ডিলারের সাথে যোগাযোগ করুন।
চিত্র 3-1 EVK স্যুটগুলির সাথে UM220-INS সিরিজের মডিউলগুলির সাধারণ ইনস্টলেশন দেখায়।

অনুগ্রহ করে UM220-INS সিরিজের মডিউলগুলির প্যাকেজ পাওয়ার পরে প্যাকেজের বিষয়বস্তু সাবধানে পরীক্ষা করুন৷
- UM220-INS EVK স্যুট (AC অ্যাডাপ্টারের সাথে)
- UM220-INS সিরিজ মডিউল ব্যবহারকারী ম্যানুয়াল
- UNICORCOM USTAR অ্যাপ্লিকেশন প্যাকেজ
- GPS L1 এবং BDS B1/GLONASS L1 সমর্থনকারী যোগ্য অ্যান্টেনা
- সরাসরি সিরিয়াল তারের এবং USB
- সিরিয়াল পোর্ট সহ পিসি বা ল্যাপটপ (উইন্ডোজ 7 এবং তার উপরে)
সঞ্চয় এবং পরিচালনার জন্য অনুগ্রহ করে বক্স এবং অ্যান্টি-স্ট্যাটিক প্লাস্টিকের ব্যাগ রাখুন
সিস্টেম ইনস্টলেশন
মডিউল ইনস্টল করার জন্য নীচের পদক্ষেপগুলি সম্পাদন করুন:
- ধাপ 1: সম্পূর্ণ অ্যান্টি-স্ট্যাটিক ব্যবস্থা করা নিশ্চিত করুন, যেমন অ্যান্টি-স্ট্যাটিক কব্জির চাবুক, ওয়ার্কবেঞ্চ গ্রাউন্ড করা;
- ধাপ 2: UM220-INS মূল্যায়ন কিট খুলুন;
- ধাপ 3: উপযুক্ত লাভ সহ GNSS অ্যান্টেনা নির্বাচন করুন, UM220-INS EVK এর সাথে অ্যান্টেনা সংযোগ করতে উপযুক্ত কেবল ব্যবহার করে নন-ব্লক এলাকায় এটি ঠিক করুন;
- ধাপ 4: সিরিয়াল ক্যাবলের মাধ্যমে পিসিকে ইভিকে সিরিয়াল পোর্টে সংযুক্ত করুন;
- ধাপ 6: পিসিতে uSTAR সফ্টওয়্যার খুলুন;
- ধাপ 7: নক্ষত্রপুঞ্জ প্রদর্শন করতে uSTAR এর মাধ্যমে রিসিভার কনফিগার করুন view, লগ বার্তা, এবং রিসিভার স্থিতি, ইত্যাদি
প্রযুক্তিগত বিশেষ উল্লেখ
বৈদ্যুতিক বিশেষ উল্লেখ
পরম সর্বোচ্চ রেটিং
| আইটেম | মিন | সর্বোচ্চ | ইউনিট | বর্ণনা |
| পাওয়ার সাপ্লাই (ভিসিসি) | -0.5 | 3.6 | V | প্রধান শক্তি |
| ব্যাকআপ ভলিউমtage (V_BCKP) | -0.5 | 3.6 | V | RTC এর জন্য ব্যাকআপ পাওয়ার সাপ্লাই |
| ডিজিটাল আইও (RXD1, RXD2)4 | -0.5 | 3.6 | V | ভলিউমtage ডিজিটাল সিগন্যাল পিনের |
| আরএফ.এন.পি. | – | +3 | dBm | অ্যান্টেনার সর্বোচ্চ ইনপুট পাওয়ার |
| স্টোরেজ তাপমাত্রা TSTG | -45 | 90 | °সে | স্টোরেজ তাপমাত্রা |
| এসএমটি রিফ্লো তাপমাত্রা TSLDR | – | +260 | °সে | সোল্ডারিং তাপমাত্রা |
অপারেশন শর্ত
| আইটেম | পিন | মিন. | সাধারণ মান | সর্বোচ্চ | ইউনি t | অবস্থা |
| পাওয়ার সাপ্লাই (ভিসিসি) | ভিসি | 3.0 | 3.3 | 3.6 | V | |
| লহরী ভলিউমtage | VP-পি | 50 | mV | |||
| পিক কারেন্ট | আইসিসিপি | 52 | mA | Vcc=3.0 V | ||
| ট্র্যাকিং গড় বর্তমান | আইএসিকিউ | 28 | 30 | 32 | mA | Vcc=3.0V |
| নিম্ন স্তরের ইনপুট ভলিউমtage | ভিআইএল | -0.3 | 0.2*Vcc | V | ||
| উচ্চ স্তরের ইনপুট ভলিউমtage | VIH | 0.7*Vcc | Vcc+0.3 | V | ||
| নিম্ন স্তরের আউটপুট ভলিউমtage | ভোল | 0 | 0.4 | V | Iout=-2mA | |
| উচ্চ স্তরের আউটপুট ভলিউমtage | VOH | Vcc-0.4 | ভিসি | V | আইআউট = 2 এমএ | |
| অ্যান্টেনা গেইন5 | GANT | 15 | 20 | 30 | dB | |
| গোলমাল চিত্র | NF | 1.9 | dB | |||
| অপারেটিং তাপমাত্রা | TOPR | -40 | +85 | °সে |
রিসেট, TIMEPULSE, WHEELTICK, TXD2, RXD2, FWD, TXD1, RXD1 সহ অ্যান্টেনা লাভের পরিসর পূর্বের লাভের পরিসরকে বোঝায়ampমডিউলের RF_IN এর আগে lifier।
মাত্রা
| প্রতীক | মিন (মিমি) | সাধারণ (মিমি) | সর্বোচ্চ (মিমি) |
| A | 15.9 | 16.0 | 16.5 |
| B | 12 | 12.2 | 12.4 |
| C | 2.4 | 2.6 | 2.8 |
| D | 0.9 | 1.0 | 1.3 |
| E | 1.0 | 1.1 | 1.2 |
| F | 2.9 | 3.0 | 3.1 |
| G | 0.9 | 1.0 | 1.3 |
| H | 0.9 | 1.0 | 1.1 |
| K | 0.7 | 0.8 | 0.9 |
| N | 0.4 | 0.5 | 0.6 |
| M | 0.8 | 0.9 | 1.0 |

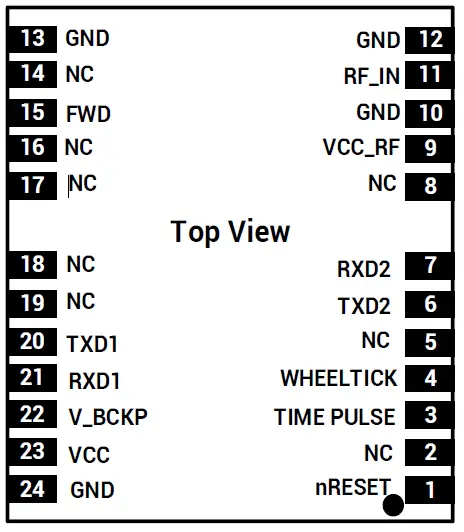
পিন সংজ্ঞা (শীর্ষ View)
| পিন না | নাম | I/O | বৈদ্যুতিক স্তর | বর্ণনা |
| 1 | nরিসেট | I | এলভিটিটিএল | ResetLow সক্রিয়, ব্যবহার না হলে বাইপাস |
| 2 | NC | – | – | সংরক্ষিত |
| 3 | টাইমপলস | O | এলভিটিটিএল | টাইম পালস (1PPS) |
|
4 |
হুইলটিক |
I |
এলভিটিটিএল |
ওডোমিটার স্পিড পালস, ব্যবহার না হলে বাইপাস। এটি ব্যবহার করার জন্য দৃঢ়ভাবে সুপারিশ করা হয়, সর্বাধিক গ্রহণযোগ্য পালস ফ্রিকোয়েন্সি 5KHz, এবং সর্বনিম্ন পালস প্রস্থ 100us-এর বেশি।দ্রষ্টব্য: ওডোমিটারের ভুল সংকেত পণ্যটির ব্যবহারে গুরুতর সমস্যা সৃষ্টি করবে। দয়া করে নিশ্চিত করুন যে সংকেতটি সঠিক। |
| 5 | NC | – | – | সংরক্ষিত |
| 6 | TXD2 | O | এলভিটিটিএল | UART 2-TX |
| 7 | আরএক্সডি 2 | I | এলভিটিটিএল | UART 2-RX |
| 8 | NC | – | – | সংরক্ষিত |
| 9 | VCC_RF | O | অ্যান্টেনা ফিড আউটপুট | |
| 10 | জিএনডি | – | – | স্থল |
| 11 | আরএফ.এন.পি. | I | – | GNSS সংকেত ইনপুট |
| 12 | জিএনডি | – | – | স্থল |
| 13 | জিএনডি | – | – | স্থল |
| 14 | NC | – | – | সংরক্ষিত |
| পিন না | নাম | I/O | বৈদ্যুতিক স্তর | বর্ণনা |
|
15 |
FWD |
I |
এলভিটিটিএল |
ওডোমিটার দিক ইনপুট, ব্যবহার না হলে বাইপাস। উচ্চ স্তর=আগামী নিম্ন স্তর=পশ্চাদপদ ব্যবহার করার জন্য দৃঢ়ভাবে সুপারিশ করা হয়
দ্রষ্টব্য: ওডোমিটারের ভুল সংকেত পণ্যটির ব্যবহারে গুরুতর সমস্যা সৃষ্টি করবে। দয়া করে নিশ্চিত করুন যে সংকেতটি সঠিক। |
| 16 | NC | – | – | সংরক্ষিত |
| 17 | NC | – | – | সংরক্ষিত |
| 18 | NC | – | – | সংরক্ষিত |
| 19 | NC | – | – | সংরক্ষিত |
| 20 | TXD1 | O | এলভিটিটিএল | UART 1-TX |
| 21 | আরএক্সডি 1 | I | এলভিটিটিএল | UART 1-RX |
|
22 |
V_BCKP |
I |
1.65V~3.6V |
ব্যাকআপ ভলিউমtagই সরবরাহ, গরম শুরুর জন্য প্রযোজ্য। আপনি যদি হট স্টার্ট ফাংশন ব্যবহার না করেন তবে V_BCKP কে VCC এর সাথে সংযুক্ত করুন। এটিকে মাটির সাথে সংযুক্ত করবেন না বা এটিকে ভাসমান ছেড়ে দেবেন না। |
| 23 | ভিসিসি | – | 3.0V~3.6V | সরবরাহ ভলিউমtage |
| 24 | জিএনডি | – | – | স্থল |
পিসিবি প্যাকেজিং

PCB সোল্ডারের ডিজাইনে, নিশ্চিত করুন যে UM220-INS সিরিজের মডিউলগুলির নীচের অংশটি সোল্ডার স্তর দিয়ে সম্পূর্ণরূপে আচ্ছাদিত করা হয়েছে।
হার্ডওয়্যার ডিজাইন
বিবেচনায় নকশা
UM220-INS সিরিজের মডিউলগুলি সঠিকভাবে কাজ করার জন্য নিম্নলিখিত সংকেতগুলিকে সঠিকভাবে সংযুক্ত করা প্রয়োজন৷ VCC মডিউলটি ভাল একঘেয়েমি, এবং আন্ডারশুট এবং রিং 5% VCC-এর মধ্যে নিশ্চিত করা প্রয়োজন৷ যদি VCC বন্ধ করা হয় এবং তারপর রিবুট করা হয়, তাহলে পাওয়ার অফ টাইম 10ms এর বেশি হতে হবে। যদি VCC পাওয়ার সাপ্লাই উপরের প্রয়োজনীয়তাগুলি পূরণ করতে না পারে, তাহলে UM220-INS মডিউলটি স্বাভাবিকভাবে শুরু না হওয়ার সম্ভাবনা রয়েছে। যখন মডিউলটি চালিত না থাকে, তখন এটি নিশ্চিত করা প্রয়োজন যে পাওয়ার সাপ্লাই এবং GPIO (PPS, TX, RX, RESET) একটি উচ্চ প্রতিবন্ধক অবস্থা বা নিম্ন স্তরে রয়েছে যাতে ফুটোজনিত মডিউলটির অস্বাভাবিক অপারেশন এড়াতে হয়।
যদি সিরিয়াল পোর্ট 2 এবং পালস প্রতি সেকেন্ডে (1PPS) ব্যবহার করা হয়, তাহলে একটি 1KΩ রোধকে অবশ্যই TXD2 এ সিরিজে সংযুক্ত থাকতে হবে এবং একটি 4.7KΩ রোধকে অবশ্যই পালস প্রতি সেকেন্ডে (1PPS) সিরিজে সংযুক্ত থাকতে হবে।
- সমস্ত GND পিন মাটিতে সংযুক্ত করুন।
- VCC পিনে নির্ভরযোগ্য শক্তি প্রদান করুন।
- অ্যান্টেনার সাথে RF_IN সংকেত সংযুক্ত করুন এবং সার্কিটে 50 Ω প্রতিবন্ধকতা মেলে তা নিশ্চিত করুন।
- নিশ্চিত করুন যে COM1 একটি PC বা একটি বাহ্যিক প্রসেসরের সাথে সংযুক্ত আছে, ব্যবহারকারীরা অবস্থান ডেটা গ্রহণ করতে এই সিরিয়াল পোর্ট ব্যবহার করতে পারেন৷ COM1 ফার্মওয়্যার আপগ্রেডের জন্যও ব্যবহৃত হয়।
ভাল কর্মক্ষমতা প্রাপ্ত করার জন্য ডিজাইনে নিম্নলিখিত আইটেমগুলিতে মনোযোগ দিন
- পাওয়ার সাপ্লাই: ভালো পারফরম্যান্সের জন্য স্থিতিশীল এবং কম লহরী শক্তি প্রয়োজনীয়।
- বিদ্যুৎ সরবরাহের বিশুদ্ধতা নিশ্চিত করতে LDO ব্যবহার করুন।
- লেআউটে যতটা সম্ভব মডিউলে LDO রাখুন।
- পাওয়ার সার্কিট ওয়্যারিং প্রশস্ত করুন বা কারেন্ট প্রেরণ করতে তামার ঢালা পৃষ্ঠ ব্যবহার করুন।
- চৌম্বকীয় কয়েলের মতো উচ্চ শক্তি বা উচ্চ ইন্ডাকট্যান্স ডিভাইসের মধ্য দিয়ে হাঁটা এড়িয়ে চলুন।
- নিশ্চিত করুন পিক টু পিক ভলিউমtagই লহর 50mV অতিক্রম করে না।
- UART ইন্টারফেস: নিশ্চিত করুন যে প্রধান সরঞ্জামগুলির সংকেত এবং বড রেট UM220-INS সিরিজের মডিউলগুলির সাথে সামঞ্জস্যপূর্ণ।
- অ্যান্টেনা ইন্টারফেস: নিশ্চিত করুন যে অ্যান্টেনা প্রতিবন্ধকতা মিলে যাচ্ছে, এবং সার্কিটটি ছোট এবং মসৃণ, তীব্র কোণ এড়াতে চেষ্টা করুন।
- UM220-INS সিরিজের মডিউলের নিচে সার্কিট এড়ানোর চেষ্টা করুন।
- এই মডিউলটি একটি তাপমাত্রা সংবেদনশীল ডিভাইস, দ্রুত তাপমাত্রা পরিবর্তনের ফলে কর্মক্ষমতা হ্রাস পাবে, এটিকে যতটা সম্ভব উচ্চ-শক্তির উচ্চ-তাপমাত্রা বাতাস এবং গরম করার ডিভাইস থেকে দূরে রাখুন।
অ্যান্টেনা
যদি UM220-INS সিরিজের মডিউলগুলি একটি +3V সক্রিয় অ্যান্টেনা ব্যবহার করে, তাহলে ফিডিং ইন্ডাক্টরের মাধ্যমে অ্যান্টেনা খাওয়ানোর জন্য VCC_RF পিন ব্যবহার করার পরামর্শ দেওয়া হয়।

দ্রষ্টব্য: ব্যবহারকারীর যদি ESD (> ± 2000 V) এর জন্য উচ্চ প্রয়োজনীয়তা থাকে, তাহলে ব্যবহারকারীর VCC_RF পিন ব্যবহার না করে অ্যান্টেনা খাওয়ানোর জন্য অন্য পদ্ধতি বিবেচনা করা উচিত। এই ক্ষেত্রে, উচ্চ ESD সুরক্ষা স্তর সহ একটি পাওয়ার সাপ্লাই চিপ বেছে নেওয়ার পরামর্শ দেওয়া হয়। গ্যাস ডিসচার্জ টিউব, ভ্যারিস্টর, টিভিএস টিউব এবং অন্যান্য উচ্চ-শক্তি প্রতিরক্ষামূলক ডিভাইসগুলিও পাওয়ার সাপ্লাই সার্কিটে ব্যবহার করা যেতে পারে মডিউলটিকে আরও ESD ক্ষতি বা অন্যান্য বৈদ্যুতিক ওভার-স্ট্রেস (EOS) থেকে রক্ষা করতে। যদি UM220-INS সিরিজের মডিউলগুলি +3V ব্যতীত একটি সক্রিয় অ্যান্টেনা ব্যবহার করে, তবে বায়াস ভলিউমtagঅ্যান্টেনার প্রয়োজনীয় V_BIAS ফিডিং ইন্ডাক্টরের মাধ্যমে অ্যান্টেনাকে পাওয়ার জন্য ব্যবহার করা হয়।

যদি UM220-INS সিরিজের মডিউলগুলি একটি প্যাসিভ অ্যান্টেনা ব্যবহার করে, তাহলে অ্যান্টেনাটিকে সরাসরি RF_IN এর সাথে সংযুক্ত করুন এবং VCC_RF ভাসমান অবস্থায় রাখা যেতে পারে। এটি লক্ষ করা উচিত যে সক্রিয় অ্যান্টেনার তুলনায়, প্যাসিভ অ্যান্টেনার ব্যবহার জিএনএসএস কর্মক্ষমতা অবনতির কারণ হতে পারে।

সিরিয়াল পোর্ট
UM220-INS সিরিজের মডিউলগুলির সিরিয়াল পোর্টগুলি LVTTL স্তরের, PC সংযোগের জন্য একটি RS232 রূপান্তরকারী ব্যবহার করুন৷

ওডোমিটার সংযোগ
UM220-INS সিরিজ মডিউলগুলি ওডোমিটারের সাথে সংযোগকারী দিকনির্দেশ (FWD) এবং বেগ পালস (WHEELTICK) সংকেত সমর্থন করে। মডিউল পজিশনিং ট্র্যাজেক্টোরির যথার্থতা বাড়ানো যেতে পারে যদি মডিউলটি কার্যকর দিকনির্দেশ এবং বেগ পালস সংকেত পায়। যানবাহনের ওডোমিটার সিগন্যাল সাধারণত 12V হয় এবং সিগন্যালের মান খারাপ। অতএব, ব্যবহারের জন্য UM220-INS NF-এ স্থানান্তরিত করার জন্য গাড়ির ওডোমিটার সংকেতগুলির জন্য সিগন্যাল ফিল্টারিং, অপটোকপ্লার আইসোলেশন এবং লেভেল কনভার্সন প্রয়োজন।

সিস্টেম স্থানাঙ্ক
UM220-INS সিরিজের মডিউলগুলির স্থানাঙ্কগুলি অবশ্যই যানবাহনের সাথে সামঞ্জস্যপূর্ণ হতে হবে, অন্যথায় আপনাকে অবশ্যই সংশ্লিষ্ট প্রোটোকল ম্যানুয়ালে CFGROTAT কমান্ড অনুসরণ করে সম্পর্কিত কনফিগারেশন করতে হবে।


- ঢালের স্বাভাবিক দিক হল Z অক্ষ, দীর্ঘ অক্ষ হল Y এবং ছোট অক্ষ হল X।
- মডিউলের স্থানাঙ্ক অবশ্যই গাড়ির সাথে সামঞ্জস্যপূর্ণ হতে হবে, যার অর্থ: X-অক্ষ এবং R-অক্ষ একই দিকে সমান্তরাল, Y-অক্ষ এবং F-অক্ষ একই দিকে সমান্তরাল এবং Z-অক্ষ এবং U- অক্ষ একই দিকে সমান্তরাল।
মডিউল ইনস্টলেশন
UM220-INS সিরিজের মডিউলগুলি অবশ্যই গাড়ির বডির সাথে কঠোরভাবে সংযুক্ত এবং দৃঢ়ভাবে স্থির থাকতে হবে।
- অ্যান্টেনাটি যতটা সম্ভব সামনের দিকে মুখ করে এবং দৃঢ়ভাবে স্থির করে ইনস্টল করা উচিত; নিশ্চিত করুন যে পরিবেশের উচ্চতা কোণ যেখানে অ্যান্টেনা অবস্থিত সেখানে 15 ° এর বেশি এবং স্থানটি বাধাহীন।
- যে পরিবেশে অ্যান্টেনা অবস্থিত, সেখানে 1568± 20MHz ফ্রিকোয়েন্সির মধ্যে কোনো শক্তিশালী হস্তক্ষেপের উৎস নেই।
ইনস্টলেশন নির্দেশাবলী
UM220-INS সিরিজের মডিউলগুলিকে অবশ্যই গাড়ির সাথে দৃঢ়ভাবে সংযুক্ত থাকতে হবে যাতে মডিউল এবং গাড়ির মধ্যে কোনো অফসেট বা কম্পন না হয়। UM220-INS সিরিজের মডিউলগুলি গাড়ির সাসপেনশন অংশে (ইলাস্টিক অংশ সহ) ইনস্টল করা উচিত নয়৷ যখন যানবাহন চলমান থাকে, গাড়ির স্থানাঙ্ক ব্যবস্থার যেকোনো পরিবর্তন UM220-INS মডিউলকে গুরুতরভাবে প্রভাবিত করবে এবং এটিকে স্বাভাবিকভাবে কাজ করা থেকে বিরত রাখবে।
ইনস্টলেশন কোণ সংজ্ঞা
গাড়ির স্থানাঙ্ক হল RFU, এবং মডিউল স্থানাঙ্ক হল xyz, চিত্র 5-5 এবং চিত্র 5-6-এ দেখানো হয়েছে৷ মডিউলের ইনস্টলেশন কোণের অ্যাঙ্গেলআর, অ্যাঙ্গেলএফ এবং অ্যাঙ্গেলইউ নীচের হিসাবে সংজ্ঞায়িত করা হয়েছে:
- xyz স্থানাঙ্কের সাথে RFU স্থানাঙ্কের প্রাথমিক অবস্থার মিল করুন
- z অক্ষ বরাবর মডিউলটির γ কোণ ঘোরান
- নতুন x অক্ষ বরাবর মডিউলটির α কোণ ঘোরান
- নতুন y অক্ষ বরাবর মডিউলটির β কোণ ঘোরান
- মডিউলটি এখন প্রকৃত ইনস্টলেশনের মতো একই অবস্থায় রয়েছে, এর সাথে, angleR=α, angleF=β, angleU=γ

মডিউল ইনস্টলেশন বিকল্প
- বিনামূল্যে ইনস্টলেশন (ডিফল্ট মোড)
UM220-INS সিরিজের মডিউলগুলি একটি তিন-অক্ষের জাইরোস্কোপ এবং একটি তিন-অক্ষের অ্যাক্সিলোমিটারকে একীভূত করে, একটি অন্তর্নির্মিত স্ব-ক্যালিব্রেশন অ্যালগরিদম সহ, যা গাড়ির স্থানাঙ্ক সিস্টেমের যেকোনো ইনস্টলেশন কোণের ক্ষেত্রে মডিউলের বিনামূল্যে ইনস্টলেশনকে সমর্থন করে, যেমন , সম্পূর্ণ অনুভূমিক ইনস্টলেশন, একটি নির্দিষ্ট কোণে আনত ইনস্টলেশন, এবং ফ্লিপ ইনস্টলেশন। - স্থির ইনস্টলেশন
ইনস্টলেশন কোণের সংজ্ঞা অনুসারে, সঠিক ইনস্টলেশন কোণটি ম্যানুয়ালি মডিউলে কনফিগার করা হয়েছে। এই ইনস্টলেশন পদ্ধতিটি একটি ছোট ক্রমাঙ্কন সময় নেয়। ইনস্টলেশন কোণটি ম্যানুয়ালি কনফিগার করার সময়, সর্বাধিক কোণ ত্রুটি ± 5 ডিগ্রিতে সীমাবদ্ধ।
রেফারেন্স বার্তা
CFGROTAT
- বার্তা বিন্যাস: $ CFGROTAT, angleR, angleF, angleU, মোড
- বর্ণনা: গাড়ির সমন্বয় সিস্টেমের সাথে সাপেক্ষে মডিউলটির ইনস্টলেশন কোণ কনফিগারেশন সেট বা আউটপুট করুন।
- পরামিতি:
- angleR, angleF এবং angleU, 5.6.2° ইউনিটের সাথে বিস্তারিত জানার জন্য 0.01 পড়ুন
- মোড, যা ইনস্টলেশন কোণ কনফিগারেশন মোডের জন্য দাঁড়িয়েছে:
0 - সাধারণ ইনস্টলেশন মোড, ইনস্টলেশন কোণের ইনপুট মান তুলনামূলকভাবে মোটা (10 ডিগ্রির মধ্যে)
2 - স্বয়ংক্রিয় ইনস্টলেশন মোড, কোন ইনস্টলেশন কোণ প্রয়োজন নেই।
মন্তব্য
- বিনামূল্যে ইনস্টলেশন মোডের জন্য 2 এবং স্থায়ী ইনস্টলেশনের জন্য 0 চয়ন করুন;
- মডিউলে angleR, angleF এবং angleU সহ প্রকৃত ইনস্টলেশন কোণগুলি ইনপুট করুন। কনফিগারেশন সম্পন্ন হওয়ার পরে, CFGSAVE কমান্ডের মাধ্যমে কনফিগারেশনটিকে ফ্ল্যাশে সংরক্ষণ করুন, অন্যথায় পরবর্তী বুটে এটিকে আবার সনাক্ত করতে হবে।
- INS-এ যেকোন কনফিগারেশনের ফলে INS মডিউলটিকে স্বাভাবিক অপারেশনের সময় বা পাওয়ার-অফ এবং পুনরায় চালু করার পরে পুনরায় আরম্ভ করা হবে এবং পূর্বে সম্পন্ন বা চলমান ক্রমাঙ্কন ক্রিয়াকলাপগুলি পুনরায় সেট করা হবে।
SNRSTAT
- বার্তা বিন্যাস: $SNRSTAT,insstatus,odostatus, InstallState, Mapstat
- বর্ণনা: আউটপুট প্রাথমিক অবস্থা (স্থির ইনস্টলেশন মোড এবং বিনামূল্যে ইনস্টলেশন মোড উভয়ের জন্য প্রযোজ্য)
- পরামিতি:
insstatus: INS-এর প্রাথমিক অবস্থা- 1: IMU ডিভাইস ব্যর্থতা
- 0: অক্ষম
- 1: আরম্ভ করা হয়েছে
- 2: ইনস্টলেশন কোণ পরিচিত হয়
- 3: সূচনা সম্পন্ন হয়েছে
ওডোস্ট্যাটাস: ওডোমিটার প্রারম্ভিক অবস্থা - 1: ওডোমিটার ডিভাইস ব্যর্থতা
- 0: অক্ষম
- 1: স্কেল ফ্যাক্টর শুরু করুন
- 2: স্কেল ফ্যাক্টর আরম্ভ সম্পন্ন হয়
- 3: স্কেল ফ্যাক্টর ক্রমাঙ্কন সম্পন্ন হয়
- InstallState
- IMU ডিভাইস ব্যর্থতা, ইনস্টলেশন কোণ অনুমান করতে অক্ষম
- ক্রমাঙ্কন অগ্রগতিতে
- স্যাটেলাইট তথ্যের বর্তমান গুণমান অপর্যাপ্ত এবং ভাল স্যাটেলাইট শর্ত প্রয়োজন
- ক্যারিয়ারের বর্তমান ম্যানুভার শর্তগুলি অপর্যাপ্ত এবং এটিকে ত্বরান্বিত করা প্রয়োজন৷
- ক্যারিয়ারের বর্তমান গতি খুবই কম এবং এটি বাড়াতে হবে।
- ম্যাপস্ট্যাট:
- MAP তথ্য প্রবেশ করার জন্য কোনো সিরিয়াল পোর্ট কনফিগার করা নেই
- সিরিয়াল পোর্ট দ্বারা কোন MAP বার্তা গৃহীত হয় না বা প্রেরিত MAP বার্তার সময়সীমা শেষ হয়
- MAP তথ্য প্রাপ্ত হয় কিন্তু যৌগিক নেভিগেশন প্রয়োগ করা হয় না
- MAP তথ্য প্রাপ্ত এবং যৌগিক নেভিগেশন প্রয়োগ করা হয়
- সম্পূর্ণ বিনামূল্যে ইনস্টলেশন পরীক্ষা
- সম্পূর্ণ স্বাধীনভাবে মডিউল ইনস্টল করুন
- $CFGROTAT,0,0,0,2 কমান্ডটি ইনপুট করুন (ফ্যাক্টরি মোডের জন্য কোন কনফিগারেশনের প্রয়োজন নেই)
- $CFGSAVE কমান্ডটি ইনপুট করুন (ফ্যাক্টরি মোডের জন্য কোন কনফিগারেশনের প্রয়োজন নেই)
- স্ব-ক্রমাঙ্কনের প্রক্রিয়াটি পার্কিং, স্যাটেলাইট গুণমান এবং কৌশল ইত্যাদির উপরোক্ত শর্তগুলি পূরণ করতে হবে। $SNRSTAT আউটপুটের মাধ্যমে স্ব-অনুক্রমণ সম্পন্ন হয়েছে কিনা তা নিশ্চিত করুন এবং যখন ইনস্ট্যাটাস 3 হয়ে যায়, তখন স্ব-অনুক্রমণ সম্পন্ন হয়।
- নিশ্চিত করুন যে স্ব-ক্যালিব্রেশন সম্পন্ন হয়েছে এবং তারপরে দুর্বল স্যাটেলাইট মানের সাথে রাস্তায় প্রবেশ করুন।
- বেসমেন্টে হট স্টার্টের ফাংশন প্রয়োজন হলে, Vbackup-কে ক্রমাগত চালিত করা প্রয়োজন;
মডিউল ক্রমাঙ্কন এবং বিজ্ঞপ্তি
স্ব-ক্রমাঙ্কন
UM220-INS সিরিজের মডিউলগুলি ইনস্টল করার পরে, মডিউলের আউটপুটের নির্ভুলতা নিশ্চিত করার জন্য স্ব-ক্রমাঙ্কন প্রয়োজন। স্ব-ক্রমাঙ্কন প্রক্রিয়ার মধ্যে, মডিউলটি ইনস্টলেশন স্ট্যাটাস প্যারামিটার এবং সেন্সর পরামিতি অনুমান করে। সেলফ-ক্যালিব্রেশন সম্পন্ন হওয়ার আগে মডিউলটি সম্পূর্ণ স্যাটেলাইট নেভিগেশন মোডে থাকে এবং সেলফ-ক্যালিব্রেশন সম্পন্ন হওয়ার পরে স্যাটেলাইট নেভিগেশন এবং ইনর্শিয়াল নেভিগেশন কমপ্যাক্ট কম্বিনেশন মোডে থাকে।
স্ব-ক্রমাঙ্কন সম্পূর্ণ করার শর্তাবলী
- শক্তি চালু হওয়ার পরে স্ব-অনুক্রমণটি ট্রিগার হয়, তিন মিনিটের বেশি সময় ধরে থামুন;
- স্ব-ক্যালিব্রেশন প্রক্রিয়া চলাকালীন ভাল স্যাটেলাইট দৃশ্যমানতা প্রয়োজন (দৃশ্যমান উপগ্রহের সংখ্যা ছয়টির কম নয় এবং CN0 30dB-এর উপরে), স্যাটেলাইট পর্যবেক্ষণের মান যত ভাল হবে, ক্রমাঙ্কন তত দ্রুত হবে।
- গাড়িটি স্বাভাবিকভাবে চলার সময় পাঁচবারের বেশি 90-ডিগ্রী টার্ন ম্যানুভার করতে হবে।
- সাধারন ড্রাইভিং এর প্রেক্ষিতে সামনের ড্রাইভিং গতি 36 কিমি/ঘন্টার উপরে রাখুন। ত্বরণের যত বেশি সময় (এটি 0.5 মি/সেকেন্ডের বেশি ত্বরণে ড্রাইভ করার পরামর্শ দেওয়া হয় 10 বারের কম নয়) এবং ড্রাইভিং সময় যত বেশি হবে, ক্রমাঙ্কন তত দ্রুত হবে। ইনর্শিয়াল নেভিগেশনের প্রথম প্রান্তিককরণের পরে ( insstatus 3), জড়ীয় নেভিগেশন ডিভাইসটিকে পর্যাপ্তভাবে প্রশিক্ষণ দেওয়ার জন্য স্বাভাবিক উন্মুক্ত পরিবেশে প্রায় 15 মিনিটের জন্য গাড়ি চালানো এখনও প্রয়োজন। প্রাক্তন জন্যampলে, ন্যাভিগেশন নির্ভুলতা সামান্য খারাপ হতে পারে যদি জড়ীয় নেভিগেশন ডিভাইসটি প্রথম প্রান্তিককরণের পরপরই একটি টানেল এবং গ্যারেজের মতো জটিল পরিবেশে প্রবেশ করে।
দ্রষ্টব্য
- মডিউলের স্বাভাবিক ব্যবহারের জন্য শুধুমাত্র একটি স্ব-অনুক্রমিক প্রক্রিয়া প্রয়োজন।
- INS মডিউলটি ক্যালিব্রেট করার পরে, প্রধান VCC এবং ব্যাকআপ V_BACKUP সহ, পাওয়ার সম্পূর্ণভাবে কেটে যাওয়ার পরেই এটি সরানো যেতে পারে।
disassembly
যখন মডিউলটি অপসারণের প্রয়োজন হয়, তখন একটি বৈদ্যুতিক সোল্ডারিং লোহা দিয়ে মডিউলের উভয় পাশে পিনের সোল্ডারিং টিনটি গলানোর এবং টুইজার দিয়ে মডিউলটি সরানোর পরামর্শ দেওয়া হয়। মডিউল অপসারণ করতে অন্য উপায় ব্যবহার করবেন না (প্রাক্তনample, মডিউল একটি গরম বায়ু বন্দুক দ্বারা উড়িয়ে দেওয়া হয়), যা মডিউল ক্ষতি হতে পারে.
প্যাকেজ
পণ্য লেবেলিং

প্যাকেজ বিবরণ
UM220-INS সিরিজের মডিউলগুলি ক্যারিয়ার টেপ এবং রিল ব্যবহার করে (মূলধারার পৃষ্ঠ মাউন্ট সরঞ্জামের জন্য উপযুক্ত), ভ্যাকুয়াম-সিল করা অ্যালুমিনিয়াম ফয়েল অ্যান্টিস্ট্যাটিক ব্যাগে প্যাকেজ করা, আর্দ্রতা রোধ করার জন্য ভিতরে একটি ডেসিক্যান্ট সহ। মডিউল ঢালাই করার জন্য রিফ্লো ঢালাই প্রক্রিয়া ব্যবহার করার সময়, মডিউলগুলিতে আর্দ্রতা নিয়ন্ত্রণ করতে অনুগ্রহ করে কঠোরভাবে IPC মান মেনে চলুন। যেহেতু প্যাকেজিং উপকরণ যেমন ক্যারিয়ার বেল্ট শুধুমাত্র 65 ডিগ্রি সেলসিয়াস তাপমাত্রা সহ্য করতে পারে, তাই বেকিংয়ের সময় প্যাকেজিং থেকে মডিউলগুলি সরানো হবে।

| আইটেম | বর্ণনা |
| মডিউল | 500 ছবি/রিল |
|
রিলের আকার |
ট্রে: 13″
বাহ্যিক ব্যাস: 330 মিমি, অভ্যন্তরীণ ব্যাস: 100 মিমি, প্রস্থ: 24 মিমি বেধ: 2.0 মিমি |
| ক্যারিয়ার টেপ | মধ্যে স্থান: 20 মিমি |
UM220 I NS সিরিজের মডিউলগুলি MSL স্তর 3-এ রেট করা হয়েছে, বেকিংয়ের প্রয়োজনীয়তার জন্য প্রাসঙ্গিক IPC/ JEDEC মানগুলি পড়ুন৷ অনুগ্রহ করে অ্যাক্সেস করুন webসাইট www.jedec.org বিস্তারিত জানার জন্য ডাউনলোড করতে। UM220 INS সিরিজের মডিউলগুলির শেলফ লাইফ এক বছর।
পরিষ্কার
পরিষ্কার করার জন্য অ্যালকোহল বা অন্যান্য জৈব দ্রাবক ব্যবহার করবেন না, অথবা এটি শিল্ডিং শেলের মধ্যে ফ্লুকের অবশিষ্টাংশের দিকে নিয়ে যেতে পারে, যার ফলে মৃদু এবং অন্যান্য সমস্যা হতে পারে।
রিফ্লো সোল্ডারিং
ডিভাইসটি যাতে পড়ে না যায় তার জন্য, ঢালাইয়ের সময় মডিউলটি প্রধান বোর্ডের উপরে স্থাপন করা উচিত। রিফ্লো সোল্ডারিং তাপমাত্রা বক্ররেখা সুপারিশ করা হয়েছে নীচের চিত্র 9 1 এ দেখানো হয়েছে ( সোল্ডার পেস্টের জন্য M 705 GRN 360 সুপারিশ করা হয়)।
দ্রষ্টব্য: মডিউল শুধুমাত্র একবার ঢালাই করা যাবে.

দ্রষ্টব্য: স্টেনসিলের অ্যাপারচারগুলি গ্রাহকের নিজস্ব ডিজাইনের প্রয়োজনীয়তা এবং পরিদর্শন বৈশিষ্ট্যগুলি পূরণ করতে হবে এবং স্টেনসিলের পুরুত্ব 0.15 মিমি এর উপরে হওয়া উচিত এবং 0.18 মিমি বাঞ্ছনীয়।
ইউনিকোর কমিউনিকেশনস, ইনক.
F3, No.7, Fengxian East Road, Haidian, Beijing, PRChina, 100094
- www.unicorecomm.com
- ফোন: 86-10-69939800
- ফ্যাক্স: 86-10-69939888
- info@unicorecomm.com
- www.unicorecomm.com
দলিল/সম্পদ
 |
Unicore Comm UM220-INS মাল্টি-GNSS ইন্টিগ্রেটেড নেভিগেশন এবং পজিশনিং মডিউল [পিডিএফ] ব্যবহারকারী ম্যানুয়াল UM220-INS মাল্টি-জিএনএসএস ইন্টিগ্রেটেড নেভিগেশন এবং পজিশনিং মডিউল, UM220-INS, মাল্টি-জিএনএসএস ইন্টিগ্রেটেড নেভিগেশন এবং পজিশনিং মডিউল, নেভিগেশন এবং পজিশনিং মডিউল, পজিশনিং মডিউল |



