Revisionshistorie
| Version | Revision Historie | Dato |
| R1 | Oprindelig udgave | februar 2020 |
| R1.1 | SNRSTAT: Opdater beskrivelsen af InstallState | juni 2020 |
| R1.2 | 2.2 Nøglefunktioner: Tilføj og forfin specifikationen | august 2020 |
| R1.3 | Tilføj parametre i afsnit 2.25.1: Tilføj noter om modulbrug | oktober 2020 |
| R1.4 | Tilføj beskrivelsen af SMT stencil | juni 2021 |
| R1.5 | Opdater strømforsyning VCC og V_BCKP | august 2021 |
| R1.6 | Tilføj noten i afsnit 5.2 | november 2021 |
| R1.7 | Hvis hotstart ikke bruges, skal du tilslutte V_BCKP til VCC. GNSS-chip kvalificeret i henhold til AEC-Q100. Revider VSWR i afsnit 2.2 | november 2022 |
Copyright
© Copyright 2009-2022 Unicore Communications, Inc. Alle rettigheder forbeholdes. Ingen del af dette dokument må gengives eller transmitteres i nogen form eller på nogen måde, elektronisk eller mekanisk, inklusive fotokopiering og optagelse, til noget formål uden udtrykkelig skriftlig tilladelse fra copyright-indehaveren.
Ansvarsfraskrivelse
Indholdet af dette dokument er genstand for revision uden varsel på grund af fortsatte fremskridt inden for metodologi, design og fremstilling, og repræsenterer ikke en forpligtelse fra Unicore Communications, Inc.s side. Oplysningerne i denne manual menes at være sande og korrekte på udgivelsestidspunktet.
Produkt overview
Omfang
Dette dokument beskriver oplysningerne om hardware, installation, specifikationer og brug af UNICORECOMM UM220-INS-seriens produkter.
Publikum
Dette dokument er beregnet til at præsentere en overview af UNICORECOMM UM220-INS-seriens produkter. Publikum forventes at besidde ekspertisen om GNSS-modtagere.
Indledning
Produktbeskrivelse
UM220-INS-seriens produkter (inklusive UM220-INS NL, UM220-INS NF) er GNSS+MEMS dual-system moduler designet til bilnavigation baseret på UNICORECOMM laveffekt GNSS SoC – UFirebird (UC6226). Med den indbyggede seks-akse MEMS og understøttelsen af multi-system fælles positionering eller enkelt-system enkeltstående positionering, kan UM220-INS serie produkt udsende GNSS+MEMS inerti positioneringsresultat kontinuerligt selv i tunneler og underjordiske garager.
GNSS-chippen i UM220-INS-modulet er kvalificeret i henhold til AEC-Q100, og produktionsprocessen overholder IATF 16949.

Figur 2-1 Moduler i UM220-INS-serien (venstre side: UM220-INS NL, højre side: UM220-INS NF)
UM220-INS Series Moduler Brugervejledning
|
Variant |
Grad | System* | Interface | DataOpdatering Sats* | ||||||
| Professionel | Automotive | GPS | BDS* | GLONASS* | Galileo | QZSS | UART1 | UART2 | ||
| UM220-INS NL | ● | ● | ● | ● | ● | ● | ● | ● | 1 Hz | |
| UM220-INS NF | ● | ● | ● | ● | ● | ● | ● | ● | 1 Hz | |
UM220-INS-seriens moduler understøtter flere positioneringstilstande, herunder fælles positionering og selvstændig positionering:
- GPS L1+SBAS+QZSS
- GPS+GLONASS+Galileo+SBAS+QZSS
- GPS+BDS+Galileo+SBAS+QZSS (standardtilstand)
- BDS
QZSS og SBAS er kun tilgængelige, når GPS er aktiveret
- BDS-systemet kan ikke køre parallelt med GLONASS-systemet.
- Standarddataopdateringshastigheden for modulet er 1Hz, som kan konfigureres til 10Hz.
Nøglefunktioner
| Magt | |
| Voltage | +3.0V~3.6V VDC |
| Strømforbrug 1 | 90mW |
| RF Input | |
| Frekvens | 1559~1605MHz |
| Indgang VSWR | ≤2.5 |
| Indgangsimpedans | 50Ω |
| Antenne Gain | 15~30dB |
| Fysiske karakterer | |
| Dimension | 16.0mm*12.2mm*2.6mm |
| Miljø | |
| Driftstemperatur | -40℃ ~ +85℃ | |||||
| Opbevaringstemperatur | -45℃ ~ +90℃ | |||||
| input Produktion Data Interface | ||||||
| UART | UART*2, LVTTL.Baud-hastighed: 4800~460800bps | |||||
| GNSS Præstation | ||||||
|
Frekvens |
BDS B1: 1561.098MHz GPS L1: 1575.42MHzGLONASS L1: 1602+0.5625*k (MHz)
Galileo E1: 1575.42 MHz |
|||||
|
TTFF (Tid til første rettelse) |
GPS+GLO+GA | GPS+BD+GA | ||||
| Koldstart Hot Start Genanskaffelse AGNSS | 30'erne 1s 1s 5s | 30'erne 1s 1s 5s | ||||
| Positioneringsnøjagtighed 2 | GPS+GLO+GA | GPS+BD+GA | ||||
| 2m | 2m | |||||
| Hastighedsnøjagtighed (RMS) | GPS+GLO+GA | GPS+BD+GA | ||||
| 0.02 m/s | 0.01 m/s | |||||
|
Følsomhed |
GPS+GLO+GA | GPS+BD+GA | BD | GPS | GLO | |
| Sporing | -161dBm | -161dBm | -159dBm | -161dBm | -158dBm | |
| Erhvervelse | -147dBm | -147dBm | -144dBm | -147dBm | -142dBm | |
| Hot Start | -154dBm | -154dBm | -149dBm | -154dBm | -148dBm | |
| Generhvervelse | -157dBm | -157dBm | -156dBm | -157dBm | -153dBm | |
| DR Positionsfejl | typ. 3 % af afstanden tilbagelagt med GNSS outage | |||||
| Frekvens af tidspulssignal | 1 Hz | |||||
| Maksimal navigationshastighed (målehastighed) | 10 Hz | |||||
| Navigationsforsinkelse | 100 ms nominelt | |||||
| Maksimal sensormålingsmeddelelse Output Rate | 10 Hz |
| Nøjagtighed af tidspulssignal | RMS 30ns (GPS+BD) 99% 50ns (GPS+BD) |
| Dataoutput 3 | NMEA 0183, Unicore Protocol |
|
Operationelle grænser |
Dynamik ≤ 4g Højde 50000m Hastighed 515m/s |
Grænseflader

UART
UM220-INS-seriens moduler understøtter to konfigurerbare UART-porte. COM1 er den serielle hovedport, som understøtter dataoverførsel og firmwareopgraderingsfunktion, signalinput/output er LVTTL. Standardbaudraten er 115200bps og kan konfigureres op til 460800bps. Sørg for, at COM1 er tilsluttet en pc eller en ekstern processor til firmwareopgraderinger. COM2 er begrænset til at understøtte datatransmission og kan ikke bruges til firmwareopgradering.
Kilometertæller (FWD/WHEELTICK)
Moduler i UM220-INS-serien har en kilometertællerindgangsgrænseflade, herunder FWD og WHEELTICK, som er nyttige til at forbedre modulets placeringsnøjagtighed.
MEMS
UM220-INS-seriens moduler integrerer seks-akset MEMS, tre-akset gyro og tre-akset accelerator om bord. MEMS giver information om luftfartsselskabets holdning og hastighedsændringer, som kombineres med GNSS for at udføre en kombineret navigationsberegning. Denne kombination sikrer meget mere kontinuerlig og uafbrudt positionering end selvstændig GNSS, især under forhold med dårligt signal.
1PPS
UM220-INS-seriens moduler udsender 1 PPS med justerbar pulsbredde og polaritet. 1PPS er ikke til tidsanvendelse.
Nulstil
Lav voltage gyldig, og den aktive tid skal vare mindst 10ms
Systeminstallation
Forudsætninger
UM220-INS-seriens moduler er elektrostatiske følsomme enheder (ESD) og skal installeres med særlige forholdsregler ved håndtering. Forkert betjening kan resultere i beskadigelse af komponenter.
- Udfør trinene i afsnit 3.2 i den rigtige rækkefølge.
- Elektrostatisk afladning (ESD) kan forårsage skade på enheden. Alle handlinger nævnt i dette kapitel skal udføres på et antistatisk arbejdsbord med et antistatisk armbånd og en ledende skumpude. Hvis det antistatiske arbejdsbord ikke er tilgængeligt, skal du bære en antistatisk håndledsrem og forbinde den anden ende til en metalramme for at spille en rolle i antistatisk elektricitet.
- Hold i kanten af modulet, og Rør IKKE ved nogen af modulets komponenter.
- Kontroller omhyggeligt, om modulet åbenlyst er løst eller beskadiget. Kontakt os eller den lokale forhandler for eventuelle problemer.
Figur 3-1 viser den typiske installation af UM220-INS serie moduler med EVK suiter.

Kontroller venligst indholdet af pakken omhyggeligt efter modtagelse af pakken med moduler i UM220-INS-serien.
- UM220-INS EVK suite (med lysnetadapter)
- UM220-INS Series Modul Brugervejledning
- UNICORECOMM uSTAR applikationspakke
- Kvalificeret antenne, der understøtter GPS L1 og BDS B1/GLONASS L1
- Direkte seriel kabel og USB
- PC eller bærbar computer med serielle porte (Windows 7 og nyere)
Opbevar venligst kasserne og de antistatiske plastikposer til opbevaring og håndtering
Systeminstallation
Udfør nedenstående trin for at installere modulet:
- Trin 1: Sørg for at udføre fulde antistatiske foranstaltninger, såsom antistatisk håndledsrem, jording af arbejdsbordet;
- Trin 2: Åbn UM220-INS evalueringssættet;
- Trin 3: Vælg GNSS-antennen med passende forstærkning, fastgør den i det ikke-blokerede område, brug det passende kabel til at forbinde antennen til UM220-INS EVK;
- Trin 4: Tilslut pc'en til den serielle EVK-port gennem det serielle kabel;
- Trin 6: Åbn uSTAR-softwaren på pc'en;
- Trin 7: Konfigurer modtageren gennem uSTAR til at vise konstellationer view, logmeddelelser og modtagerstatus osv.
Tekniske specifikationer
Elektriske specifikationer
Absolut maksimale vurderinger
| Punkt | Min | Maks | Enhed | Beskrivelse |
| Strømforsyning (VCC) | -0.5 | 3.6 | V | Hovedstrøm |
| Backup Voltage (V_BCKP) | -0.5 | 3.6 | V | Backup strømforsyning til RTC |
| Digital IO (RXD1, RXD2)4 | -0.5 | 3.6 | V | Voltage af de digitale signalben |
| RF_IN | – | +3 | dBm | Max input effekt af antenne |
| Opbevaringstemperatur TSTG | -45 | 90 | °C | Opbevaringstemperatur |
| SMT Reflow Temperatur TSLDR | – | +260 | °C | Lodningstemperatur |
Driftstilstand
| Punkt | Stift | Min. | Typisk Værdi | Maks. | Uni t | Tilstand |
| Strømforsyning (VCC) | Vcc | 3.0 | 3.3 | 3.6 | V | |
| Ripple Voltage | Vp-p | 50 | mV | |||
| Spidsstrøm | Iccp | 52 | mA | Vcc=3.0 V | ||
| Sporing af gennemsnitsstrøm | IACQ | 28 | 30 | 32 | mA | Vcc=3.0V |
| LOW Level Input Voltage | VIL | -0.3 | 0.2*Vcc | V | ||
| High Level Input Voltage | VIH | 0.7*Vcc | Vcc+0.3 | V | ||
| LOW Level Output Voltage | BIND | 0 | 0.4 | V | Iout=-2mA | |
| High Level Output Voltage | VOH | Vcc–0.4 | Vcc | V | Iout=2 mA | |
| Antenneforstærkning 5 | GANT | 15 | 20 | 30 | dB | |
| Støjfigur | NF | 1.9 | dB | |||
| Driftstemperatur | TOPR | -40 | +85 | °C |
Inklusive nulstilling, TIMEPULSE, WHEELTICK, TXD2, RXD2, FWD, TXD1, RXD1 Antenneforstærkningsområdet refererer til forstærkningsområdet for den føramplifier før RF_IN af modulet.
Dimensioner
| Symbol | Min (mm) | Typisk (mm) | Maks (mm) |
| A | 15.9 | 16.0 | 16.5 |
| B | 12 | 12.2 | 12.4 |
| C | 2.4 | 2.6 | 2.8 |
| D | 0.9 | 1.0 | 1.3 |
| E | 1.0 | 1.1 | 1.2 |
| F | 2.9 | 3.0 | 3.1 |
| G | 0.9 | 1.0 | 1.3 |
| H | 0.9 | 1.0 | 1.1 |
| K | 0.7 | 0.8 | 0.9 |
| N | 0.4 | 0.5 | 0.6 |
| M | 0.8 | 0.9 | 1.0 |

Pin-definition (øverst View)
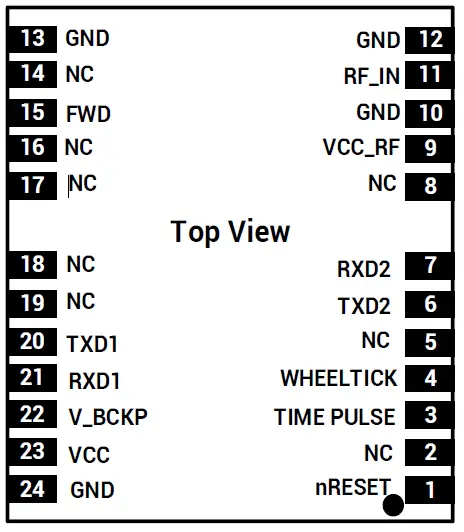
| Stift Ingen | Navn | I/O | Elektrisk Niveau | Beskrivelse |
| 1 | NULSTIL | I | LVTTL | Nulstil lav aktiv, forbigå, hvis den ikke er i brug |
| 2 | NC | – | – | Reserveret |
| 3 | TIDSPUL | O | LVTTL | Tidspuls (1PPS) |
|
4 |
HJULSPÅDE |
I |
LVTTL |
Kilometertæller hastighed puls, bypass hvis den ikke er i brug. Det anbefales kraftigt at bruge, den maksimalt acceptable pulsfrekvens er 5KHz, og den mindste pulsbredde er større end 100us.Bemærk: Forkerte signaler fra kilometertælleren vil føre til alvorlige problemer i brugen af produktet. Sørg for, at signalet er korrekt. |
| 5 | NC | – | – | Reserveret |
| 6 | TXD2 | O | LVTTL | UART 2-TX |
| 7 | RXD2 | I | LVTTL | UART 2-RX |
| 8 | NC | – | – | Reserveret |
| 9 | VCC_RF | O | Antenne feed output | |
| 10 | GND | – | – | Jord |
| 11 | RF_IN | I | – | GNSS-signalindgang |
| 12 | GND | – | – | Jord |
| 13 | GND | – | – | Jord |
| 14 | NC | – | – | Reserveret |
| Stift Ingen | Navn | I/O | Elektrisk Niveau | Beskrivelse |
|
15 |
FWD |
I |
LVTTL |
Kilometertæller retning input, bypass hvis den ikke er i brug. Det anbefales kraftigt at bruge Højt niveau=fremadLavt niveau=tilbage
Bemærk: Forkerte signaler fra kilometertælleren vil føre til alvorlige problemer i brugen af produktet. Sørg for, at signalet er korrekt. |
| 16 | NC | – | – | Reserveret |
| 17 | NC | – | – | Reserveret |
| 18 | NC | – | – | Reserveret |
| 19 | NC | – | – | Reserveret |
| 20 | TXD1 | O | LVTTL | UART 1-TX |
| 21 | RXD1 | I | LVTTL | UART 1-RX |
|
22 |
V_BCKP |
I |
1.65V~3.6V |
Backup voltage-forsyning, gældende for varmstart. Hvis du ikke bruger hotstart-funktionen, skal du tilslutte V_BCKP til VCC. Slut den IKKE til jord eller lad den ikke flyde. |
| 23 | VCC | – | 3.0 V~3.6 V | Forsyning voltage |
| 24 | GND | – | – | Jord |
PCB emballage

Ved udformningen af PCB-lodning skal du sørge for, at området under modulerne i UM220-INS-serien er fuldt dækket med loddelag.
Hardware Design
Design i overvejelser
Det er nødvendigt at tilslutte følgende signaler korrekt for at få UM220-INS-serien til at fungere korrekt. VCC-modulet er af god monotoni, og underskud og ringetoner skal garanteres inden for 5 % VCC. Hvis VCC slukkes og derefter genstartes, skal slukningstiden være længere end 10 ms. Hvis VCC-strømforsyningen ikke kan opfylde ovenstående krav, er der en sandsynlighed for, at UM220-INS-modulet ikke starter normalt. Når modulet ikke er tændt, er det nødvendigt at sikre, at strømforsyningen og GPIO (PPS, TX, RX, RESET) er i en høj impedanstilstand eller et lavt niveau for at undgå unormal drift af modulet forårsaget af lækage.
Hvis seriel port 2 og puls pr. sekund (1PPS) bruges, skal en 1KΩ modstand forbindes i serie ved TXD2 og en 4.7KΩ modstand skal forbindes i serie ved pulsen pr. sekund (1PPS)
- Tilslut alle GND-benene til jord.
- Giv pålidelig strøm til VCC-stiften.
- Tilslut RF_IN-signalet til antennen, og sørg for, at 50 Ω-impedansen passer til kredsløbet.
- Sørg for, at COM1 er tilsluttet en pc eller en ekstern processor, brugere kan bruge denne serielle port til at modtage positionsdata. COM1 bruges også til firmwareopgraderinger.
Vær opmærksom på følgende elementer i designet for at opnå god ydeevne
- Strømforsyning: Stabil og lav bølgekraft er nødvendig for god ydeevne.
- Brug LDO for at sikre renheden af strømforsyningen.
- Placer LDO til modulet så tæt som muligt i layout.
- Udvid strømkredsløbets ledninger, eller brug kobberstøbningsoverfladen til at overføre strøm.
- Undgå at gå gennem enheder med høj effekt eller høj induktans, såsom en magnetisk spole.
- Sørg for, at peak til peak voltage krusning ikke overstiger 50mV.
- UART -grænseflader: Sørg for, at signalerne og baudhastigheden for hovedudstyret stemmer overens med modulerne i UM220-INS-serien.
- Antenne interface: Sørg for, at antennens impedans matcher, og at kredsløbet er kort og glat, prøv at undgå spids vinkel.
- Prøv at undgå kredsløb under UM220-INS serie moduler.
- Dette modul er en temperaturfølsom enhed, hurtige temperaturændringer vil resultere i reduceret ydeevne, hold det så langt væk fra enhver højeffekt højtemperaturluft- og varmeenheder som muligt.
Antenne
Hvis moduler i UM220-INS-serien bruger en +3V aktiv antenne, anbefales det at bruge VCC_RF-stift til at føre antennen gennem fødeinduktoren.

Note: Hvis brugeren har et højt krav til ESD (> ± 2000 V), bør brugeren overveje en anden metode til at føde antennen i stedet for at bruge VCC_RF-stiften. I dette tilfælde anbefales det at vælge en strømforsyningschip med højt ESD-beskyttelsesniveau. Gasudladningsrør, varistor, TVS-rør og andre højeffekts beskyttende enheder kan også bruges i strømforsyningskredsløbet for yderligere at beskytte modulet mod ESD-skader eller anden elektrisk overspænding (EOS). Hvis modulerne i UM220-INS-serien bruger en anden aktiv antenne end +3V, vil bias vol.tage V_BIAS, der kræves af antennen, bruges til at forsyne antennen med strøm gennem fødeinduktoren.

Hvis modulerne i UM220-INS-serien bruger en passiv antenne, skal du tilslutte antennen til RF_IN direkte, og VCC_RF kan efterlades svævende. Det skal bemærkes, at sammenlignet med aktive antenner kan brugen af passive antenner forårsage forringelse af GNSS-ydeevnen.

Seriel port
De serielle porte på moduler i UM220-INS-serien er på LVTTL-niveau, brug en RS232-konverter til pc-forbindelsen.

Kilometertæller tilslutning
UM220-INS-seriens moduler understøtter retnings- (FWD) og hastighedsimpulssignaler (WHEELTICK), der forbindes med kilometertæller. Nøjagtigheden af modulpositioneringsbanen kunne forbedres, hvis modulet opnår effektive retnings- og hastighedsimpulssignaler. Køretøjers kilometertællersignal er generelt 12V, og signalkvaliteten er dårlig. Derfor kræves signalfiltrering, optokoblerisolering og niveaukonvertering, for at køretøjets kilometertællersignaler kan overføres til UM220-INS NF til brug.

Systemkoordinater
Koordinaterne for UM220-INS-seriens moduler skal være i overensstemmelse med køretøjernes, ellers skal du udføre den relaterede konfiguration ved at følge CFGROTAT-kommandoen i den tilsvarende protokolmanual.


- Den normale retning af skjoldet er Z-aksen, den lange akse er Y, og den korte akse er X.
- Modulets koordinater skal stemme overens med køretøjets, hvilket betyder: X-aksen og R-aksen er parallelle i samme retning, Y-aksen og F-aksen er parallelle i samme retning, og Z-aksen og U- aksen er parallelle i samme retning.
Installation af modulet
UM220-INS-seriens moduler skal være stift forbundet til køretøjets karrosseri og fast fastgjort.
- Antennen skal installeres med fronten opad så meget som muligt og fast fastgjort; sørg for, at elevationsvinklen for omgivelserne, hvor antennen er placeret, er større end 15°, og at rummet er uhindret.
- I det miljø, hvor antennen er placeret, er der ingen stærk interferenskilde inden for frekvensen 1568±20MHz.
Installationsvejledning
Modulerne i UM220-INS-serien skal være solidt forbundet til køretøjet for at forhindre forskydninger eller vibrationer mellem modulet og køretøjet. UM220-INS-seriens moduler bør ikke installeres i køretøjets ophængsdel (med elastisk del). Når køretøjet er i bevægelse, vil enhver ændring af køretøjets koordinatsystem alvorligt påvirke UM220-INS-modulet og forhindre det i at fungere normalt.
Definition af installationsvinkel
Køretøjskoordinaten er RFU, og modulkoordinaten er xyz, som vist i figur 5-5 og figur 5-6. AngleR, angleF og angleU for modulets installationsvinkel er defineret som nedenfor:
- Sammenfaldende starttilstanden for RFU-koordinat med den for xyz-koordinat
- Drej modulets γ-vinkel langs z-aksen
- Drej modulets α-vinkel langs den nye x-akse
- Drej modulets β-vinkel langs den nye y-akse
- Modulet er nu i samme tilstand som selve installationen, med det vinkelR=α, vinkelF=β, vinkelU=γ

Installationsmuligheder for modulet
- Gratis installation (standardtilstand)
UM220-INS serie moduler integrerer et tre-akset gyroskop og et tre-akset accelerometer, med en indbygget selvkalibreringsalgoritme, som understøtter den frie installation af modulet med hensyn til enhver installationsvinkel på køretøjets koordinatsystem, som f.eks. , den helt vandrette installation, skrå montering i en bestemt vinkel og flip-installation. - Fast installation
I henhold til installationsvinkeldefinitionen konfigureres den nøjagtige installationsvinkel manuelt i modulet. Denne installationsmetode tager kort kalibreringstid. Når installationsvinklen konfigureres manuelt, er den maksimale vinkelfejl begrænset til ± 5 grader.
Referencemeddelelser
CFGROTAT
- Meddelelsesformat: $ CFGROTAT,angleR, angleF, angleU, mode
- Beskrivelse: Indstil eller udlæs modulets installationsvinkelkonfigurationer i forhold til køretøjets koordinatsystem.
- Parametre:
- angleR, angleF og angleU, se 5.6.2 for detaljer med enheden på 0.01°
- mode, som står for installationsvinkelkonfigurationstilstanden:
0 – Generel installationstilstand, inputværdien af installationsvinklen er relativt grov (inden for 10 grader)
2 – Automatisk installationstilstand, ingen installationsvinkel er påkrævet.
Bemærkning
- Vælg 2 for fri installationstilstand og 0 for fast installation;
- Indtast de faktiske installationsvinkler inklusive angleR, angleF og angleU i modulet. Når konfigurationen er fuldført, skal du gemme konfigurationen i flashen gennem CFGSAVE-kommandoen, ellers skal den identificeres igen ved næste opstart.
- Enhver konfiguration på INS vil få INS-modulet til at blive geninitialiseret under normal drift eller efter sluk og genstart, og de tidligere afsluttede eller igangværende kalibreringsoperationer vil blive nulstillet.
SNRSTAT
- Meddelelsesformat: $SNRSTAT,insstatus,odostatus, InstallState, Mapstat
- Beskrivelse: Udgangsstatus (gælder for både fast installationstilstand og fri installationstilstand)
- Parametre:
insstatus: Indledende status for INS- 1: IMU-enhedsfejl
- 0: Deaktiveret
- 1: initialiseret
- 2: Installationsvinklen er kendt
- 3: Initialisering er afsluttet
odostatus: Status for kilometertællerinitialisering - 1: Fejl på kilometertællerenheden
- 0: Deaktiveret
- 1: Initialiser skalafaktoren
- 2: Skalafaktorinitialiseringen er fuldført
- 3: Kalibreringen af skalafaktoren er afsluttet
- InstallState
- IMU-enhedsfejl, kan ikke estimere installationsvinklen
- I gang med kalibreringen
- Den aktuelle kvalitet af satellitinformation er utilstrækkelig, og der kræves bedre satellitforhold
- Transportørens aktuelle manøvreforhold er utilstrækkelige, og det er nødvendigt at accelerere den
- Transportørens aktuelle hastighed er for lav, og den skal øges.
- Mapstat:
- Ingen seriel port er konfigureret til at indtaste MAP-oplysninger
- Der modtages ingen MAP-meddelelser af den serielle port, eller den sendte MAP-meddelelse er timeout
- MAP-oplysninger modtages, men anvendes ikke på den sammensatte navigation
- MAP-information modtages og anvendes på den sammensatte navigation
- Fuldt gratis installationstest
- Installer modulet helt frit
- Indtast kommandoen $CFGROTAT,0,0,0,2 (ingen konfiguration er nødvendig for fabrikstilstanden)
- Indtast kommandoen $CFGSAVE (ingen konfiguration er nødvendig for fabrikstilstanden)
- Processen med selvkalibrering skal opfylde ovenstående betingelser for parkering, satellitkvalitet og manøvre osv. Bekræft om selvkalibreringen er fuldført gennem $SNRSTAT-output, og når insstatus bliver 3, er selvkalibreringen fuldført.
- Sørg for, at selvkalibreringen er gennemført, og kør derefter ind på vejen med dårlig satellitkvalitet.
- Hvis der er behov for funktionen varmstart i kælderen, kræver Vbackup, at der strømføres kontinuerligt;
Modulkalibrering og meddelelse
Selvkalibrering
Efter installationen af modulerne i UM220-INS-serien er selvkalibreringen påkrævet for at sikre nøjagtigheden af modulets output. I processen med selvkalibreringen estimerer modulet installationsstatusparametre og sensorparametre. Modulet er i fuld satellitnavigationstilstand, før selvkalibreringen er afsluttet, og er i satellitnavigation og inerti-navigation, kompakt kombinationstilstand, efter at selvkalibreringen er afsluttet.
Betingelser for fuldførelse af selvkalibrering
- Selvkalibreringen udløses efter tænding, stop i mere end tre minutter;
- God satellitsynlighed er påkrævet under selvkalibreringsprocessen (antallet af synlige satellitter er ikke mindre end seks, og CN0 er over 30dB), jo bedre satellitobservationskvaliteten er, jo hurtigere vil kalibreringen være.
- Det er nødvendigt at foretage 90-graders svingmanøvrer i mere end fem gange, mens køretøjet kører normalt.
- Hold den fremadgående kørehastighed over 36 km/t under forudsætning af normal kørsel. Jo flere accelerationstider (det anbefales at køre med en acceleration på mere end 0.5 m/s i kvadrat i ikke mindre end 10 gange), og jo længere køretiden er, jo hurtigere vil kalibreringen være. Efter den første justering af inertial navigation ( insstatus 3), er det stadig nødvendigt at køre i ca. 15 minutter i det normale åbne miljø for at træne inerti-navigationsenheden tilstrækkeligt. F.eksampSå kan navigationspræcisionen være lidt dårligere, hvis inerti-navigationsenheden kommer ind i et komplekst miljø såsom en tunnel og garage umiddelbart efter den første justering.
Note
- Den normale brug af modulet kræver kun én selvkalibreringsproces.
- Efter at INS-modulet er kalibreret, kan det kun flyttes, efter at strømmen er fuldstændig afbrudt, inklusive hoved-VCC og backup-V_BACKUP.
Demontering
Når det er nødvendigt at fjerne modulet, anbefales det at smelte loddeblikken af stifterne på begge sider af modulet med en elektrisk loddekolbe og fjerne modulet med en pincet. Brug IKKE andre midler til at fjerne modulet (f.eksample, modulet blæses af af en varmluftpistol), hvilket kan føre til modulskader.
Pakke
Produktmærkning

Pakkebeskrivelse
Modulerne i UM220-INS-serien bruger bæretape og rulle (velegnet til almindeligt overflademonteringsudstyr), pakket i vakuumforseglede antistatiske aluminiumsfolieposer med et tørremiddel indeni for at forhindre fugt. Når du bruger reflow-svejseproces til at svejse moduler, skal du nøje overholde IPC-standarden for at udføre fugtighedskontrol på moduler. Da emballagematerialer såsom bærebånd kun kan modstå temperaturen på 65 grader Celsius, skal moduler fjernes fra emballagen under bagningen.

| Punkt | Beskrivelse |
| modul | 500 billeder/rulle |
|
Hjul størrelse |
Bakke: 13"
Udvendig diameter: 330 mm, Indvendig diameter: 100 mm, Bredde: 24 mm Tykkelse: 2.0mm |
| Bærebånd | Mellemrum: 20 mm |
UM220 I NS-seriens moduler er klassificeret til MSL-niveau 3, se de relevante IPC/JEDEC-standarder for krav til bagning. Venligst adgang til webwebsted www.jedec.org at downloade for detaljer. Holdbarheden af UM220 INS serie moduler er et år.
Ren
Brug IKKE alkohol eller andre organiske opløsningsmidler til at rengøre, da det ellers kan føre til fluk-rester i afskærmningsskallen, hvilket kan forårsage meldug og andre problemer.
Reflow lodning
For at undgå, at enheden falder af, skal modulet placeres på toppen af hovedkortet under svejsningen. Reflow-loddetemperaturkurve anbefales som vist i figur 9 1 nedenfor (M 705 GRN 360 anbefales til loddepasta).
Note: Modulet kan kun svejses én gang.

Note: Åbningerne i stencilen skal opfylde kundens egne designkrav og inspektionsspecifikationer, og tykkelsen af stencilen skal være over 0.15 mm, og 0.18 mm anbefales.
Unicore Communications, Inc.
F3, No.7, Fengxian East Road, Haidian, Beijing, PRChina, 100094
- www.unicorecomm.com
- Telefon: 86-10-69939800
- Fax: 86-10-69939888
- info@unicorecomm.com
- www.unicorecomm.com
Dokumenter/ressourcer
 |
Unicore Comm UM220-INS Multi-GNSS integreret navigations- og positioneringsmodul [pdfBrugermanual UM220-INS Multi-GNSS integreret navigations- og positioneringsmodul, UM220-INS, Multi-GNSS integreret navigations- og positioneringsmodul, navigations- og positioneringsmodul, positioneringsmodul |



