Історія версій
| Версія | Ревізія історія | Дата |
| R1 | Початкове видання | лютий 2020 р |
| 1.1 рандів | SNRSTAT: оновити опис InstallState | Червень 2020 р |
| 1.2 рандів | 2.2 Основні характеристики: додати та уточнити специфікацію | Серпень 2020 р |
| 1.3 рандів | Додайте параметри в розділі 2.25.1: додайте примітки щодо використання модуля | жовтень 2020 р |
| 1.4 рандів | Додайте опис трафарету SMT | Червень 2021 р |
| 1.5 рандів | Оновіть блок живлення VCC і V_BCKP | Серпень 2021 р |
| 1.6 рандів | Додайте примітку в Розділ 5.2 | листопад 2021 р |
| 1.7 рандів | Якщо гарячий старт не використовується, підключіть V_BCKP до VCC. Мікросхема GNSS сертифікована згідно з AEC-Q100. Перегляньте КСВН у розділі 2.2 | листопад 2022 р |
Авторське право
© Unicore Communications, Inc., 2009-2022. Усі права захищено. Жодна частина цього документа не може бути відтворена або передана в будь-якій формі чи будь-якими засобами, електронними чи механічними, включаючи фотокопіювання та запис, з будь-якою метою без прямого письмового дозволу власника авторських прав.
Відмова від відповідальності
Зміст цього документа підлягає перегляду без попередження через постійний прогрес у методології, дизайні та виробництві та не є зобов’язанням з боку Unicore Communications, Inc. Інформація, що міститься в цьому посібнику, вважається правдивою та правильною на момент публікації.
Продукт закінченийview
Область застосування
У цьому документі описано інформацію про апаратне забезпечення, встановлення, специфікації та використання продуктів серії UNICORECOMM UM220-INS.
Аудиторія
Цей документ призначений для представлення оверview продуктів серії UNICORECOMM UM220-INS. Очікується, що аудиторія матиме досвід роботи з приймачами GNSS.
вступ
Опис товару
Продукти серії UM220-INS (включаючи UM220-INS NL, UM220-INS NF) — це двосистемні модулі GNSS+MEMS, розроблені для автомобільної навігації на базі UNICORECOMM GNSS SoC малої потужності – UFirebird (UC6226). Завдяки вбудованій шестиосьовій MEMS і підтримці багатосистемного спільного позиціонування або односистемного автономного позиціонування продукт серії UM220-INS може безперервно видавати результати інерційного позиціонування GNSS+MEMS навіть у тунелях і підземних гаражах.
Мікросхема GNSS у модулі UM220-INS сертифікована згідно з AEC-Q100, а виробничий процес відповідає стандарту IATF 16949.

Рисунок 2-1 Модулі серії UM220-INS (ліва сторона: UM220-INS NL, права сторона: UM220-INS NF)
Посібник користувача модулів серії UM220-INS
|
Варіант |
Оцінка | система* | Інтерфейс | Даніоновлення Оцінка* | ||||||
| професійний | Автомобільний | GPS | BDS* | ГЛОНАСС * | Галілей | QZSS | UART1 | UART2 | ||
| UM220-INS NL | ● | ● | ● | ● | ● | ● | ● | ● | 1 Гц | |
| UM220-INS NF | ● | ● | ● | ● | ● | ● | ● | ● | 1 Гц | |
Модулі серії UM220-INS підтримують кілька режимів позиціонування, включаючи спільне та автономне позиціонування:
- GPS L1+SBAS+QZSS
- GPS+ГЛОНАСС+Galileo+SBAS+QZSS
- GPS+BDS+Galileo+SBAS+QZSS (режим за замовчуванням)
- БДС
QZSS і SBAS доступні, лише якщо ввімкнено GPS
- Система BDS не може працювати паралельно з системою ГЛОНАСС.
- Стандартна частота оновлення даних модуля становить 1 Гц, яку можна налаштувати на 10 Гц.
Ключові характеристики
| потужність | |
| томtage | +3.0 В~3.6 В постійного струму |
| Споживана потужність1 | 90 мВт |
| RF Введення | |
| Частота | 1559~1605 МГц |
| Вхідний КСВ | ≤2.5 |
| Вхідний опір | 50 Ом |
| Коефіцієнт підсилення антени | 15~30 дБ |
| Фізичні персонажі | |
| Розмір | 16.0мм*12.2мм*2.6мм |
| Навколишнє середовище | |
| Робоча температура | -40℃ ~ +85℃ | |||||
| Температура зберігання | -45℃ ~ +90℃ | |||||
| Введення/ Вихід Дані Інтерфейс | ||||||
| UART | UART*2, LVTTL.Швидкість передачі: 4800~460800 біт/с | |||||
| GNSS Продуктивність | ||||||
|
Частота |
BDS B1: 1561.098 МГц GPS L1: 1575.42 МГц ГЛОНАСС L1: 1602+0.5625*k (МГц)
Galileo E1: 1575.42 МГц |
|||||
|
TTFF (Час для першого виправлення) |
GPS+GLO+GA | GPS+BD+GA | ||||
| Холодний пуск Гарячий пуск Повторне отримання AGNSS | 30-х 1-х 1-х 5-х | 30-х 1-х 1-х 5-х | ||||
| Точність позиціонування2 | GPS+GLO+GA | GPS+BD+GA | ||||
| 2m | 2m | |||||
| Точність швидкості (RMS) | GPS+GLO+GA | GPS+BD+GA | ||||
| 0.02 м/с | 0.01 м/с | |||||
|
Чутливість |
GPS+GLO+GA | GPS+BD+GA | BD | GPS | GLO | |
| Відстеження | -161 дБм | -161 дБм | -159 дБм | -161 дБм | -158 дБм | |
| Придбання | -147 дБм | -147 дБм | -144 дБм | -147 дБм | -142 дБм | |
| Гарячий старт | -154 дБм | -154 дБм | -149 дБм | -154 дБм | -148 дБм | |
| Повторне придбання | -157 дБм | -157 дБм | -156 дБм | -157 дБм | -153 дБм | |
| Помилка позиції DR | тип. 3 % відстані, пройденої з GNSS outage | |||||
| Частота часового імпульсного сигналу | 1 Гц | |||||
| Максимальна швидкість навігації (швидкість вимірювання) | 10 Гц | |||||
| Затримка навігації | 100 мс номінальний | |||||
| Максимальна швидкість виведення повідомлень вимірювання датчика | 10 Гц |
| Точність часу імпульсного сигналу | RMS 30 нс (GPS+BD) 99% 50 нс (GPS+BD) |
| Виведення даних3 | NMEA 0183, протокол Unicore |
|
Експлуатаційні межі |
Динаміка ≤ 4g Висота 50000м Швидкість 515м/с |
Інтерфейси

UART
Модулі серії UM220-INS підтримують два настроювані порти UART. COM1 є основним послідовним портом, який підтримує функцію передачі даних і оновлення мікропрограми, вхід/вихід сигналу LVTTL. Швидкість передачі за замовчуванням становить 115200 біт/с, її можна налаштувати до 460800 біт/с. Переконайтеся, що COM1 підключено до ПК або зовнішнього процесора для оновлення мікропрограми. COM2 обмежено для підтримки передачі даних і не може використовуватися для оновлення мікропрограми.
Одометр (FWD/WHEELTICK)
Модулі серії UM220-INS мають інтерфейс введення одометра, включаючи FWD і WHEELTICK, які корисні для підвищення точності розташування модуля.
MEMS
Модулі серії UM220-INS інтегрують шестиосьову MEMS, тривісний гіроскоп і триосьовий прискорювач. MEMS надає інформацію про положення авіакомпанії та зміни швидкості, які поєднуються з GNSS для виконання комбінованого навігаційного розрахунку. Ця комбінація забезпечує набагато більш постійне та безперервне позиціонування, ніж автономна GNSS, особливо в умовах поганого сигналу.
1 PPS
Модулі серії UM220-INS видають 1 PPS з регульованою шириною імпульсу та полярністю. 1PPS не призначений для визначення часу.
Скинути
Низький об'ємtage дійсний, і активний час повинен тривати щонайменше 10 мс
Встановлення системи
передумови
Модулі серії UM220-INS є електростатично чутливими пристроями (ESD), і їх необхідно встановлювати з дотриманням особливих застережень під час поводження. Неправильна експлуатація може призвести до пошкодження компонентів.
- Виконайте кроки в розділі 3.2 у правильному порядку.
- Електростатичний розряд (ESD) може спричинити пошкодження пристрою. Усі операції, згадані в цьому розділі, слід виконувати на антистатичному верстаку з використанням антистатичного браслета та електропровідної пінопласту. Якщо антистатичний верстак недоступний, одягніть антистатичний браслет і приєднайте інший кінець до металевої рами, щоб відігравати роль антистатики.
- Тримайте модуль за край і НЕ торкайтеся жодних компонентів модуля.
- Уважно перевірте, чи модуль явно не закріплений або пошкоджений. Будь ласка, зв’яжіться з нами або місцевим дилером у разі будь-яких проблем.
На малюнку 3-1 показано типове встановлення модулів серії UM220-INS із комплектами EVK.

Будь ласка, уважно перевірте вміст упаковки після отримання упаковки модулів серії UM220-INS.
- Комплект EVK UM220-INS (з адаптером змінного струму)
- Посібник користувача модуля серії UM220-INS
- Пакет прикладних програм UNICORECOMM uSTAR
- Сертифікована антена з підтримкою GPS L1 і BDS B1/GLONASS L1
- Прямий послідовний кабель і USB
- ПК або ноутбук із послідовними портами (Windows 7 і вище)
Будь ласка, зберігайте коробки та антистатичні пластикові пакети для зберігання та транспортування
Встановлення системи
Щоб встановити модуль, виконайте наведені нижче дії.
- Крок 1: переконайтеся, що вжито повних антистатичних заходів, таких як антистатичний браслет, заземлення робочого столу;
- Крок 2: Відкрийте набір оцінки UM220-INS;
- Крок 3: Виберіть антену GNSS з відповідним посиленням, закріпіть її в незаблокованій зоні, використовуючи відповідний кабель для підключення антени до UM220-INS EVK;
- Крок 4: Підключіть ПК до послідовного порту EVK за допомогою послідовного кабелю;
- Крок 6: Відкрийте програмне забезпечення uSTAR на ПК;
- Крок 7: Налаштуйте приймач через uSTAR для відображення сузір’їв view, повідомлення журналу та статус отримувача тощо.
Технічні характеристики
Електричні характеристики
Абсолютні максимальні рейтинги
| Пункт | Хв | Макс | одиниця | опис |
| Джерело живлення (VCC) | -0.5 | 3.6 | V | Основна потужність |
| Резервне копіювання Томtagе (V_BCKP) | -0.5 | 3.6 | V | Резервне живлення для RTC |
| Цифровий IO (RXD1, RXD2)4 | -0.5 | 3.6 | V | томtage контактів цифрового сигналу |
| RF_IN | – | +3 | дБм | Максимальна вхідна потужність антени |
| Температура зберігання TSTG | -45 | 90 | °C | Температура зберігання |
| Температура оплавлення SMT TSLDR | – | +260 | °C | Температура пайки |
Стан експлуатації
| Пункт | Pin | Хв. | Типовий Значення | Макс. | Uni t | Хвороба |
| Джерело живлення (VCC) | VDC | 3.0 | 3.3 | 3.6 | V | |
| Ripple Voltage | Вп-п | 50 | mV | |||
| Піковий струм | Iccp | 52 | mA | Vcc=3.0 В | ||
| Відстеження середнього струму | IACQ | 28 | 30 | 32 | mA | Vcc=3.0В |
| LOW Level Input Voltage | VIL | -0.3 | 0.2*Vcc | V | ||
| Вхід високого рівня Voltage | VIH | 0.7*Vcc | Vcc+0.3 | V | ||
| НИЗЬКИЙ РІВЕНЬ Вихідної гучностіtage | VOL | 0 | 0.4 | V | Iout=-2mA | |
| Вихід високого рівня Voltage | VOH | Vcc–0.4 | VDC | V | Iout=2 мА | |
| Посилення антени5 | GANT | 15 | 20 | 30 | dB | |
| Фігура шуму | NF | 1.9 | dB | |||
| Робоча температура | TOPR | -40 | +85 | °C |
Включаючи скидання, TIMEPULSE, WHEELTICK, TXD2, RXD2, FWD, TXD1, RXD1 Діапазон посилення антени відноситься до діапазону посилення попередньогоamplifier перед RF_IN модуля.
Розміри
| символ | Хв (мм) | Типовий (мм) | Макс (мм) |
| A | 15.9 | 16.0 | 16.5 |
| B | 12 | 12.2 | 12.4 |
| C | 2.4 | 2.6 | 2.8 |
| D | 0.9 | 1.0 | 1.3 |
| E | 1.0 | 1.1 | 1.2 |
| F | 2.9 | 3.0 | 3.1 |
| G | 0.9 | 1.0 | 1.3 |
| H | 0.9 | 1.0 | 1.1 |
| K | 0.7 | 0.8 | 0.9 |
| N | 0.4 | 0.5 | 0.6 |
| M | 0.8 | 0.9 | 1.0 |

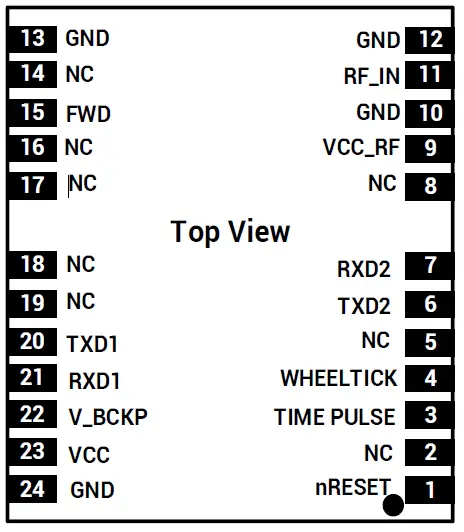
Визначення шпильки (верх View)
| Pin немає | Ім'я | I/O | Електричний Рівень | опис |
| 1 | nСКИНУТИ | I | LVTTL | ResetLow активний, обійти, якщо не використовується |
| 2 | NC | – | – | Зарезервовано |
| 3 | ТАЙМОПУЛЬС | O | LVTTL | Часовий імпульс (1PPS) |
|
4 |
КОЛЕСО |
I |
LVTTL |
Імпульс швидкості одометра, обійти, якщо не використовується. Настійно рекомендується використовувати, максимально прийнятна частота імпульсів становить 5 кГц, а мінімальна ширина імпульсу перевищує 100 мкс.Примітка: неправильні сигнали одометра призведуть до серйозних проблем у використанні виробу. Переконайтеся, що сигнал правильний. |
| 5 | NC | – | – | Зарезервовано |
| 6 | TXD2 | O | LVTTL | UART 2-TX |
| 7 | RXD2 | I | LVTTL | UART 2-RX |
| 8 | NC | – | – | Зарезервовано |
| 9 | VCC_RF | O | Антенний вихід | |
| 10 | GND | – | – | Земля |
| 11 | RF_IN | I | – | Вхід сигналу GNSS |
| 12 | GND | – | – | Земля |
| 13 | GND | – | – | Земля |
| 14 | NC | – | – | Зарезервовано |
| Pin немає | Ім'я | I/O | Електричний Рівень | опис |
|
15 |
FWD |
I |
LVTTL |
Введення напрямку одометра, обхід, якщо не використовується. Настійно рекомендується використовувати High level=forwardLow level=backward
Примітка: неправильні сигнали одометра призведуть до серйозних проблем у використанні виробу. Переконайтеся, що сигнал правильний. |
| 16 | NC | – | – | Зарезервовано |
| 17 | NC | – | – | Зарезервовано |
| 18 | NC | – | – | Зарезервовано |
| 19 | NC | – | – | Зарезервовано |
| 20 | TXD1 | O | LVTTL | UART 1-TX |
| 21 | RXD1 | I | LVTTL | UART 1-RX |
|
22 |
V_BCKP |
I |
1.65В~3.6В |
Резервна копія томtagелектроживлення, застосовне для гарячого запуску. Якщо ви не використовуєте функцію гарячого запуску, підключіть V_BCKP до VCC. НЕ підключайте його до заземлення та не залишайте його плаваючим. |
| 23 | VCC | – | 3.0 В~3.6 В | Постачання обtage |
| 24 | GND | – | – | Земля |
Упаковка друкованої плати

При розробці пайки друкованої плати переконайтеся, що область під модулями серії UM220-INS повністю покрита шаром припою.
Дизайн обладнання
Дизайн в міркуваннях
Для належної роботи модулів серії UM220-INS необхідно правильно підключити наступні сигнали. Модуль VCC має хорошу монотонність, а недостатність і дзвін повинні бути гарантовані в межах 5% VCC. Якщо VCC вимкнуто, а потім перезавантажено, час вимкнення має бути більше 10 мс. Якщо джерело живлення VCC не відповідає наведеним вище вимогам, існує ймовірність того, що модуль UM220-INS не запуститься нормально. Коли живлення модуля не ввімкнено, необхідно переконатися, що джерело живлення та GPIO (PPS, TX, RX, RESET) перебувають у стані високого або низького опору, щоб уникнути ненормальної роботи модуля, спричиненої витоком.
Якщо використовується послідовний порт 2 і імпульс за секунду (1PPS), резистор 1KΩ потрібно підключити послідовно до TXD2, а резистор 4.7KΩ слід підключити послідовно за імпульс за секунду (1PPS).
- Підключіть усі контакти GND до землі.
- Забезпечте надійне живлення контакту VCC.
- Підключіть сигнал RF_IN до антени та переконайтеся, що імпеданс 50 Ом відповідає ланцюгу.
- Переконайтеся, що COM1 підключено до ПК або зовнішнього процесора, користувачі можуть використовувати цей послідовний порт для отримання даних про місцезнаходження. COM1 також використовується для оновлення мікропрограми.
Зверніть увагу на наступні елементи конструкції, щоб отримати хорошу продуктивність
- Блок живлення: Для хорошої продуктивності необхідна стабільна та низька потужність пульсацій.
- Використовуйте LDO для забезпечення чистоти джерела живлення.
- Розмістіть LDO до модуля якомога ближче за макетом.
- Розширте проводку ланцюга живлення або використовуйте мідну поверхню для передачі струму.
- Уникайте проходження через будь-які потужні або індуктивні пристрої, такі як магнітна котушка.
- Переконайтеся, що об’єм від піку до пікуtage пульсація не перевищує 50 мВ.
- Інтерфейси UART: переконайтеся, що сигнали та швидкість передачі основного обладнання відповідають сигналам і швидкості передачі даних модулів серії UM220-INS.
- Інтерфейс антени: переконайтеся, що імпеданс антени відповідає, а ланцюг короткий і гладкий, намагайтеся уникати гострого кута.
- Намагайтеся уникати ланцюгів нижче модулів серії UM220-INS.
- Цей модуль є термочутливим пристроєм, швидкі зміни температури призведуть до зниження продуктивності, тримайте його якомога далі від будь-яких потужних високотемпературних повітряних і нагрівальних пристроїв.
антена
Якщо модулі серії UM220-INS використовують активну антену +3 В, рекомендується використовувати штифт VCC_RF для живлення антени через живильний індуктор.

Примітка: Якщо користувач має високі вимоги до ESD (> ± 2000 В), користувачеві слід розглянути інший спосіб живлення антени, а не використання контакту VCC_RF. У цьому випадку рекомендується вибрати мікросхему блоку живлення з високим рівнем захисту від електростатичного розряду. Газорозрядна трубка, варістор, трубка TVS та інші потужні захисні пристрої також можуть використовуватися в ланцюзі джерела живлення для подальшого захисту модуля від пошкодження ESD або іншого електричного перенапруження (EOS). Якщо модулі серії UM220-INS використовують активну антену, відмінну від +3 В, величина зсувуtage V_BIAS, необхідний антені, використовується для живлення антени через живильний індуктор.

Якщо модулі серії UM220-INS використовують пасивну антену, підключіть антену безпосередньо до RF_IN, і VCC_RF можна залишити плаваючим. Слід зазначити, що порівняно з активними антенами використання пасивних антен може призвести до погіршення продуктивності GNSS.

Послідовний порт
Послідовні порти модулів серії UM220-INS мають рівень LVTTL, для підключення до ПК використовується конвертер RS232.

Підключення одометра
Модулі серії UM220-INS підтримують сигнали напрямку (FWD) і імпульсу швидкості (WHEELTICK), що підключаються до одометра. Точність траєкторії позиціонування модуля може бути підвищена, якщо модуль отримує ефективні імпульсні сигнали напрямку та швидкості. Сигнал одометра транспортних засобів зазвичай становить 12 В, і якість сигналу погана. Таким чином, для передачі сигналів одометра автомобіля на UM220-INS NF для використання потрібні фільтрація сигналу, ізоляція оптронів і перетворення рівня.

Система координат
Координати модулів серії UM220-INS мають узгоджуватися з координатами транспортних засобів, інакше ви повинні виконати відповідну конфігурацію, виконавши команду CFGROTAT у відповідному посібнику з протоколу.


- Нормальним напрямком екрану є вісь Z, довга вісь Y і коротка вісь X.
- Координата модуля повинна відповідати координаті транспортного засобу, що означає: вісь X і R паралельні в одному напрямку, Y і F паралельні в одному напрямку, а Z і U- осі паралельні в одному напрямку.
Встановлення модуля
Модулі серії UM220-INS повинні бути жорстко з'єднані з кузовом автомобіля і міцно закріплені.
- Антена повинна бути встановлена передньою стороною максимально вгору та міцно закріплена; переконайтеся, що кут підйому середовища, де розташована антена, перевищує 15°, а простір вільний.
- У середовищі, де розташована антена, немає сильного джерела перешкод у межах частоти 1568± 20 МГц.
Інструкції з монтажу
Модулі серії UM220-INS повинні бути надійно під’єднані до автомобіля, щоб запобігти будь-якому зсуву або вібрації між модулем і транспортним засобом. Модулі серії UM220-INS не можна встановлювати в частині підвіски автомобіля (з пружною частиною). Під час руху транспортного засобу будь-яка зміна системи координат автомобіля серйозно вплине на модуль UM220-INS і завадить його нормальній роботі.
Визначення кута установки
Координата транспортного засобу — RFU, а координата модуля — xyz, як показано на рисунках 5-5 і 5-6. AngleR, angleF і angleU кута установки модуля визначені нижче:
- Збігається початковий стан координати RFU з координатою xyz
- Повернути модуль на кут γ вздовж осі z
- Поверніть кут α модуля вздовж нової осі x
- Поверніть кут β модуля вздовж нової осі y
- Модуль тепер у тому самому стані, що й фактична інсталяція, при цьому angleR=α, angleF=β, angleU=γ

Параметри встановлення модуля
- Безкоштовне встановлення (режим за замовчуванням)
Модулі серії UM220-INS інтегрують тривісний гіроскоп і триосьовий акселерометр із вбудованим алгоритмом самокалібрування, який підтримує вільну установку модуля щодо будь-якого кута установки системи координат автомобіля, наприклад , повністю горизонтальна установка, похила установка під певним кутом і перекидна установка. - Фіксована установка
Відповідно до визначення кута установки точний кут установки вручну налаштовується в модулі. Цей спосіб установки займає короткий час калібрування. При ручному налаштуванні кута установки максимальна похибка кута обмежена ± 5 градусами.
Довідкові повідомлення
CFGROTAT
- Формат повідомлення: $ CFGROTAT, angleR, angleF, angleU, mode
- опис: Встановіть або виведіть конфігурації кутів встановлення модуля щодо системи координат автомобіля.
- Параметри:
- angleR, angleF і angleU, зверніться до 5.6.2 для деталей з одиницею вимірювання 0.01°
- режим, який означає режим конфігурації кута установки:
0 – Загальний режим установки, вхідне значення кута установки є відносно грубим (в межах 10 градусів)
2 – автоматичний режим встановлення, кут установки не потрібен.
Зауваження
- Виберіть 2 для вільного режиму встановлення та 0 для фіксованого встановлення;
- Введіть у модуль фактичні кути установки, включаючи angleR, angleF і angleU. Після завершення конфігурації збережіть конфігурацію на флеш-пам’ять за допомогою команди CFGSAVE, інакше її потрібно буде ідентифікувати знову під час наступного завантаження.
- Будь-яка конфігурація на INS призведе до повторної ініціалізації модуля INS під час нормальної роботи або після вимкнення живлення та перезапуску, а раніше виконані або поточні операції калібрування буде скинуто.
SNRSTAT
- Формат повідомлення: $SNRSTAT,insstatus,odostatus, InstallState, Mapstat
- опис: Початковий статус виведення (застосовується як для режиму фіксованої інсталяції, так і для режиму вільної інсталяції)
- Параметри:
insstatus: Початковий статус INS- 1: збій пристрою IMU
- 0: вимкнено
- 1: ініціалізовано
- 2: Кут установки відомий
- 3: Ініціалізацію завершено
odostatus: стан ініціалізації одометра - 1: Помилка пристрою одометра
- 0: вимкнено
- 1: Ініціалізація коефіцієнта масштабування
- 2: Ініціалізація масштабного коефіцієнта завершена
- 3: калібрування масштабного коефіцієнта завершено
- InstallState
- Несправність пристрою IMU, неможливо оцінити кут встановлення
- У процесі калібрування
- Поточна якість супутникової інформації є недостатньою, тому потрібні кращі супутникові умови
- Поточні умови маневрування авіаносця недостатні і потребують прискорення
- Поточна швидкість перевізника занадто низька, і її потрібно збільшити.
- Mapstat:
- Послідовний порт не налаштовано для введення інформації MAP
- Послідовний порт не отримує жодних повідомлень MAP або надіслане повідомлення MAP минув
- Інформація MAP отримана, але не застосована до комбінованої навігації
- Інформація КАРТИ приймається та застосовується до комбінованої навігації
- Повністю безкоштовний тест встановлення
- Встановіть модуль абсолютно вільно
- Введіть команду $CFGROTAT,0,0,0,2 (для заводського режиму конфігурація не потрібна)
- Введіть команду $CFGSAVE (для заводського режиму конфігурація не потрібна)
- Процес самокалібрування має задовольняти наведеним вище умовам паркування, якості супутника та маневру тощо. Перевірте, чи завершено самокалібрування за допомогою вихідних даних $SNRSTAT, і коли статус insstatus стане 3, самокалібрування завершено.
- Переконайтеся, що самокалібрування завершено, а потім вирушайте на дорогу з поганою якістю супутника.
- Якщо потрібна функція гарячого старту в підвалі, Vbackup вимагає постійного живлення;
Калібрування модуля та повідомлення
Самокалібрування
Після встановлення модулів серії UM220-INS необхідне самокалібрування, щоб забезпечити точність виходу модуля. У процесі самокалібрування модуль оцінює параметри стану установки та параметри датчика. Перед завершенням самокалібрування модуль перебуває в режимі повної супутникової навігації, а після завершення самокалібрування – у компактному комбінованому режимі супутникової навігації та інерціальної навігації.
Умови виконання самокалібрування
- Самокалібрування запускається після ввімкнення живлення, зупинка більше ніж на три хвилини;
- Під час самокалібрування потрібна хороша супутникова видимість (кількість видимих супутників не менше шести, а CN0 вище 30 дБ), чим краща якість супутникового спостереження, тим швидше буде калібрування.
- Необхідно зробити маневри повороту на 90 градусів більше п'яти разів, поки автомобіль працює нормально.
- Підтримуйте швидкість руху вперед вище 36 км/год за умови нормального водіння. Чим більше разів прискорення (рекомендовано рухатися з прискоренням понад 0.5 м/с у квадраті не менше 10 разів) і чим довший час водіння, тим швидше буде калібрування. Після першого вирівнювання інерціальної навігації ( insstatus 3), все ще необхідно проїхати приблизно 15 хвилин у звичайному відкритому середовищі, щоб адекватно навчити інерціальний навігаційний пристрій. наприкладampНаприклад, точність навігації може бути дещо гіршою, якщо інерціальний навігаційний пристрій потрапляє в складне середовище, таке як тунель або гараж, відразу після першого вирівнювання.
Примітка
- Для нормального використання модуля потрібен лише один процес самокалібрування.
- Після калібрування модуля INS його можна переміщати лише після повного відключення живлення, включаючи основний VCC і резервний V_BACKUP.
Розбирання
При необхідності зняття модуля рекомендується розплавити паяльник контактів з обох сторін модуля електропаяльником і вийняти модуль пінцетом. НЕ використовуйте інші засоби для видалення модуля (наприклад,ampнаприклад, модуль здувається гарячим повітрям), що може призвести до пошкодження модуля.
Пакет
Маркування продукту

Опис пакета
Модулі серії UM220-INS використовують несучу стрічку та котушку (підходять для основного обладнання для поверхневого монтажу), упаковані в вакуумні антистатичні пакети з алюмінієвої фольги з осушувачем всередині для запобігання вологи. Використовуючи процес зварювання оплавленням для зварювання модулів, будь ласка, суворо дотримуйтесь стандарту IPC для контролю вологості на модулях. Оскільки пакувальні матеріали, такі як несуча стрічка, можуть витримувати лише температуру 65 градусів за Цельсієм, модулі слід витягувати з упаковки під час запікання.

| Пункт | опис |
| Модуль | 500 фото / бобіна |
|
Розмір котушки |
Лоток: 13 дюймів
Зовнішній діаметр: 330 мм, внутрішній діаметр: 100 мм, ширина: 24 мм Товщина: 2.0 мм |
| Несуча стрічка | Відстань між: 20 мм |
Модулі серії UM220 I NS мають рейтинг рівня MSL 3, зверніться до відповідних стандартів IPC/JEDEC щодо вимог до випічки. Будь ласка, перейдіть до webсайт www.jedec.org для завантаження для отримання детальної інформації. Термін придатності модулів серії UM220 INS становить один рік.
чистий
НЕ використовуйте спирт або інші органічні розчинники для очищення, інакше це може призвести до потрапляння залишків флюку в екрануючу оболонку, що спричинить утворення цвілі та інші проблеми.
Паяння відновлюють
Щоб уникнути падіння пристрою, під час зварювання модуль слід розташувати на головній платі. Температурна крива пайки оплавленням рекомендована, як показано на малюнку 9 1 нижче (рекомендується M 705 GRN 360 для паяльної пасти).
Примітка: Модуль можна зварити лише один раз.

Примітка: Отвори в трафареті мають відповідати власним вимогам клієнта до дизайну та специфікаціям перевірки, а товщина трафарету має бути більше 0.15 мм, а рекомендовано 0.18 мм.
Unicore Communications, Inc.
F3, No.7, Fengxian East Road, Haidian, Beijing, PRChina, 100094
- www.unicorecomm.com
- Телефон: 86-10-69939800
- Факс: 86-10-69939888
- info@unicorecomm.com
- www.unicorecomm.com
Документи / Ресурси
 |
Інтегрований модуль навігації та позиціонування Unicore Comm UM220-INS Multi-GNSS [pdfПосібник користувача UM220-INS Multi-GNSS інтегрований модуль навігації та позиціонування, UM220-INS, мульти-GNSS інтегрований модуль навігації та позиціонування, навігаційний і позиціонуючий модуль, модуль позиціонування |



