Povijest revizija
| Verzija | Revizija Povijest | Datum |
| R1 | Početno izdanje | 2020. veljače |
| R1.1 | SNRSTAT: ažurirajte opis InstallState-a | lipnja 2020 |
| R1.2 | 2.2 Ključne značajke: dodajte i pročistite specifikaciju | kolovoz 2020 |
| R1.3 | Dodajte parametre u odjeljak 2.25.1: dodajte bilješke o korištenju modula | listopada 2020 |
| R1.4 | Dodajte opis SMT šablone | lipnja 2021 |
| R1.5 | Ažurirajte napajanje VCC i V_BCKP | kolovoz 2021 |
| R1.6 | Dodajte napomenu u odjeljku 5.2 | studeni 2021 |
| R1.7 | Ako se ne koristi vrući start, spojite V_BCKP na VCC. GNSS čip kvalificiran prema AEC-Q100. Revidirajte VSWR u odjeljku 2.2 | studeni 2022 |
Autorska prava
© Autorska prava 2009-2022 Unicore Communications, Inc. Sva prava pridržana. Nijedan dio ovog dokumenta ne smije se reproducirati ili prenositi u bilo kojem obliku ili na bilo koji način, elektronički ili mehanički, uključujući fotokopiranje i snimanje, u bilo koju svrhu bez izričitog pismenog dopuštenja vlasnika autorskih prava.
Odricanje
Sadržaj ovog dokumenta podložan je reviziji bez prethodne najave zbog stalnog napretka u metodologiji, dizajnu i proizvodnji i ne predstavlja obvezu od strane Unicore Communications, Inc. Vjeruje se da su informacije sadržane u ovom priručniku istinite i točne u trenutku objave.
Proizvod gotovview
Opseg
Ovaj dokument opisuje informacije o hardveru, instalaciji, specifikacijama i korištenju proizvoda serije UNICORECOMM UM220-INS.
Publika
Ovaj dokument je namijenjen predstavljanju overview proizvoda serije UNICORECOMM UM220-INS. Od publike se očekuje da posjeduje stručno znanje o GNSS prijamnicima.
Uvod
Opis proizvoda
Proizvodi serije UM220-INS (uključujući UM220-INS NL, UM220-INS NF) su GNSS+MEMS dvosistemski moduli dizajnirani za automobilsku navigaciju na temelju UNICORECOMM GNSS SoC male snage – UFirebird (UC6226). S ugrađenim MEMS-om sa šest osi i podrškom za višesistemsko zajedničko pozicioniranje ili jednosistemsko samostalno pozicioniranje, proizvodi serije UM220-INS mogu kontinuirano emitirati GNSS+MEMS rezultate inercijalnog pozicioniranja čak iu tunelima i podzemnim garažama.
GNSS čip u modulu UM220-INS kvalificiran je prema AEC-Q100, a proizvodni proces u skladu je s IATF 16949.

Slika 2-1 Moduli serije UM220-INS (lijeva strana: UM220-INS NL, desna strana: UM220-INS NF)
Korisnički priručnik za module serije UM220-INS
|
Varijanta |
Razred | sustav* | Sučelje | PodaciAžurirati Stopa* | ||||||
| Profesionalni | Automobilizam | GPS | BDS* | GLONASS* | Galileo | QZSS | UART1 | UART2 | ||
| UM220-INS NL | ● | ● | ● | ● | ● | ● | ● | ● | 1 Hz | |
| UM220-INS NF | ● | ● | ● | ● | ● | ● | ● | ● | 1 Hz | |
Moduli serije UM220-INS podržavaju više načina pozicioniranja uključujući zajedničko pozicioniranje i samostalno pozicioniranje:
- GPS L1+SBAS+QZSS
- GPS+GLONASS+Galileo+SBAS+QZSS
- GPS+BDS+Galileo+SBAS+QZSS (zadani način)
- BDS
QZSS i SBAS dostupni su samo kada je GPS omogućen
- Sustav BDS ne može raditi paralelno sa sustavom GLONASS.
- Zadana brzina ažuriranja podataka modula je 1Hz, koja se može konfigurirati na 10Hz.
Ključne značajke
| Vlast | |
| Voltage | +3.0V~3.6V VDC |
| Potrošnja energije1 | 90 mW |
| RF Ulazni | |
| Frekvencija | 1559~1605MHz |
| Ulazni VSWR | ≤2.5 |
| Ulazna impedancija | 50Ω |
| Dobitak antene | 15~30dB |
| Fizički likovi | |
| Dimenzija | 16.0mm*12.2mm*2.6mm |
| okoliš | |
| Radna temperatura | -40 ℃ ~ +85 ℃ | |||||
| Temperatura skladištenja | -45 ℃ ~ +90 ℃ | |||||
| ulazni Izlaz Podaci Sučelje | ||||||
| UART | UART*2, LVTTL.Brzina prijenosa podataka: 4800~460800bps | |||||
| GNSS Performanse | ||||||
|
Frekvencija |
BDS B1: 1561.098MHz GPS L1: 1575.42MHzGLONASS L1: 1602+0.5625*k (MHz)
Galileo E1: 1575.42MHz |
|||||
|
TTFF (vrijeme za prvi popravak) |
GPS+GLO+GA | GPS+BD+GA | ||||
| Hladni start, vrući start, ponovna akvizicija AGNSS | 30s 1s 1s 5s | 30s 1s 1s 5s | ||||
| Točnost pozicioniranja 2 | GPS+GLO+GA | GPS+BD+GA | ||||
| 2m | 2m | |||||
| Preciznost brzine (RMS) | GPS+GLO+GA | GPS+BD+GA | ||||
| 0.02m/s | 0.01m/s | |||||
|
Osjetljivost |
GPS+GLO+GA | GPS+BD+GA | BD | GPS | GLO | |
| Praćenje | -161dBm | -161dBm | -159dBm | -161dBm | -158dBm | |
| Stjecanje | -147dBm | -147dBm | -144dBm | -147dBm | -142dBm | |
| Vrući početak | -154dBm | -154dBm | -149dBm | -154dBm | -148dBm | |
| Ponovno stjecanje | -157dBm | -157dBm | -156dBm | -157dBm | -153dBm | |
| Pogreška položaja DR | tip. 3 % prijeđene udaljenosti s GNSS outage | |||||
| Frekvencija vremenskog pulsnog signala | 1 Hz | |||||
| Maksimalna brzina navigacije (mjerna stopa) | 10 Hz | |||||
| Latencija navigacije | 100ms nominalno | |||||
| Maksimalna brzina izlaza poruke mjerenja senzora | 10 Hz |
| Točnost vremenskog pulsnog signala | RMS 30 ns (GPS+BD) 99% 50 ns (GPS+BD) |
| Izlaz podataka3 | NMEA 0183, Unicore protokol |
|
Operativna ograničenja |
Dinamika ≤ 4g Nadmorska visina 50000m Brzina 515m/s |
sučelja

UART
Moduli serije UM220-INS podržavaju dva konfigurabilna UART priključka. COM1 je glavni serijski port, koji podržava prijenos podataka i funkciju nadogradnje firmvera, ulaz/izlaz signala je LVTTL. Zadana brzina prijenosa podataka je 115200 bps, a može se konfigurirati do 460800 bps. Provjerite je li COM1 povezan s računalom ili vanjskim procesorom za nadogradnju firmvera. COM2 je ograničen na podršku za prijenos podataka i ne može se koristiti za nadogradnju firmvera.
Odometar (FWD/WHEELTICK)
Moduli serije UM220-INS imaju ulazno sučelje brojača kilometara uključujući FWD i WHEELTICK, koji su korisni za poboljšanje točnosti lokacije modula.
MEMS
Moduli serije UM220-INS integriraju šestosni MEMS, troosni žiroskop i troosni akcelerator na brodu. MEMS pruža informacije o položaju nosača i promjenama brzine, koje se kombiniraju s GNSS-om za izvođenje kombiniranog navigacijskog izračuna. Ova kombinacija osigurava mnogo kontinuiranije i neprekinuto pozicioniranje nego samostalni GNSS, posebno u uvjetima sa slabim signalom.
1PPS
Moduli serije UM220-INS izlaze 1 PPS s podesivom širinom i polaritetom pulsa. 1PPS nije za primjenu vremena.
Resetiraj
Niski volumentage valjan, a potrebno je da aktivno vrijeme traje najmanje 10ms
Instalacija sustava
Preduvjeti
Moduli serije UM220-INS su elektrostatički osjetljivi uređaji (ESD) i moraju se instalirati uz posebne mjere opreza pri rukovanju. Nepravilan rad može dovesti do oštećenja komponenti.
- Izvedite korake u odjeljku 3.2 ispravnim redoslijedom.
- Elektrostatičko pražnjenje (ESD) može uzrokovati oštećenje uređaja. Sve radnje spomenute u ovom poglavlju treba izvoditi na antistatičkom radnom stolu, koristeći antistatičku narukvicu i jastučić od vodljive pjene. Ako antistatički radni stol nije dostupan, nosite antistatički remen za ručni zglob i spojite drugi kraj na metalni okvir kako biste igrali ulogu antistatika.
- Držite rub modula i NE dirajte komponente modula.
- Pažljivo provjerite je li modul očito labav ili oštećen. Za sve probleme kontaktirajte nas ili lokalnog zastupnika.
Slika 3-1 prikazuje tipičnu instalaciju modula serije UM220-INS s EVK paketima.

Pažljivo provjerite sadržaj paketa nakon primitka paketa modula serije UM220-INS.
- UM220-INS EVK paket (s AC adapterom)
- Korisnički priručnik modula serije UM220-INS
- UNICORECOMM uSTAR aplikacijski paket
- Kvalificirana antena koja podržava GPS L1 i BDS B1/GLONASS L1
- Izravni serijski kabel i USB
- PC ili prijenosno računalo sa serijskim priključcima (Windows 7 i noviji)
Sačuvajte kutije i antistatičke plastične vrećice za skladištenje i rukovanje
Instalacija sustava
Izvršite korake u nastavku za instalaciju modula:
- Korak 1: Obavezno poduzmite sve antistatičke mjere, kao što je antistatička narukvica, uzemljenje radnog stola;
- Korak 2: Otvorite komplet za procjenu UM220-INS;
- Korak 3: Odaberite GNSS antenu s odgovarajućim pojačanjem, fiksirajte je u neblokiranom području, koristeći odgovarajući kabel za povezivanje antene na UM220-INS EVK;
- Korak 4: Spojite računalo na EVK serijski priključak putem serijskog kabela;
- Korak 6: Otvorite uSTAR softver na računalu;
- Korak 7: Konfigurirajte prijemnik putem uSTAR-a za prikaz konstelacija view, poruke dnevnika i status primatelja itd.
Tehničke specifikacije
Električne specifikacije
Apsolutne maksimalne ocjene
| Artikal | Min | Maks | Jedinica | Opis |
| Napajanje (VCC) | -0.5 | 3.6 | V | Glavna snaga |
| Sigurnosna kopija svtage (V_BCKP) | -0.5 | 3.6 | V | Rezervno napajanje za RTC |
| Digitalni IO (RXD1, RXD2)4 | -0.5 | 3.6 | V | Voltage od pinova digitalnog signala |
| RF_IN | – | +3 | dBm | Maksimalna ulazna snaga antene |
| Temperatura skladištenja TSTG | -45 | 90 | °C | Temperatura skladištenja |
| SMT Reflow temperatura TSLDR | – | +260 | °C | Temperatura lemljenja |
Stanje rada
| Artikal | Pin | Min. | Tipično Vrijednost | Maks. | Uni t | Stanje |
| Napajanje (VCC) | VCC | 3.0 | 3.3 | 3.6 | V | |
| Ripple Voltage | Vp-p | 50 | mV | |||
| Vršna struja | Iccp | 52 | mA | Vcc=3.0 V | ||
| Praćenje prosječne struje | IACQ | 28 | 30 | 32 | mA | Vcc=3.0 V |
| LOW Level Input Voltage | VIL | -0.3 | 0.2*Vcc | V | ||
| Ulaz visoke razine Voltage | VIH | 0.7*Vcc | Vcc+0.3 | V | ||
| LOW Level Output Voltage | VOL | 0 | 0.4 | V | Iout=-2mA | |
| High Level Output Voltage | VOH | Vcc–0.4 | VCC | V | Iout=2 mA | |
| pojačanje antene5 | GANT | 15 | 20 | 30 | dB | |
| Slika buke | NF | 1.9 | dB | |||
| Radna temperatura | TOPR | -40 | +85 | °C |
Uključujući resetiranje, TIMEPULSE, WHEELTICK, TXD2, RXD2, FWD, TXD1, RXD1 Raspon pojačanja antene odnosi se na raspon pojačanja predamplifier prije RF_IN modula.
Dimenzije
| Simbol | Min (mm) | Tipično (mm) | Maks (mm) |
| A | 15.9 | 16.0 | 16.5 |
| B | 12 | 12.2 | 12.4 |
| C | 2.4 | 2.6 | 2.8 |
| D | 0.9 | 1.0 | 1.3 |
| E | 1.0 | 1.1 | 1.2 |
| F | 2.9 | 3.0 | 3.1 |
| G | 0.9 | 1.0 | 1.3 |
| H | 0.9 | 1.0 | 1.1 |
| K | 0.7 | 0.8 | 0.9 |
| N | 0.4 | 0.5 | 0.6 |
| M | 0.8 | 0.9 | 1.0 |

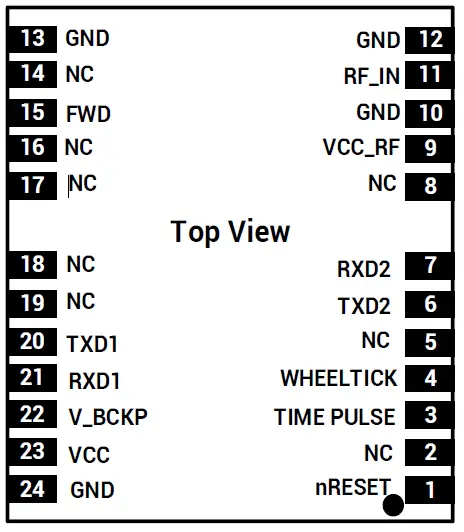
Definicija pribadače (vrh View)
| Pin Ne | Ime | I/O | Električni Razina | Opis |
| 1 | nRESETIRAJ | I | LVTTL | ResetLow aktivan, premosnica ako nije u upotrebi |
| 2 | NC | – | – | Rezervirano |
| 3 | VREMENSKI PULS | O | LVTTL | Vremenski puls (1PPS) |
|
4 |
KOLIČAR |
I |
LVTTL |
Puls brzine brojača kilometara, premosnica ako se ne koristi. Toplo se preporuča korištenje, najveća prihvatljiva frekvencija impulsa je 5KHz, a minimalna širina impulsa je veća od 100us.Napomena: Neispravni signali brojača kilometara dovest će do ozbiljnih problema u korištenju proizvoda. Provjerite je li signal ispravan. |
| 5 | NC | – | – | Rezervirano |
| 6 | TXD2 | O | LVTTL | UART 2-TX |
| 7 | RXD2 | I | LVTTL | UART 2-RX |
| 8 | NC | – | – | Rezervirano |
| 9 | VCC_RF | O | Antenski izlaz | |
| 10 | GND | – | – | Ground |
| 11 | RF_IN | I | – | Ulaz GNSS signala |
| 12 | GND | – | – | Ground |
| 13 | GND | – | – | Ground |
| 14 | NC | – | – | Rezervirano |
| Pin Ne | Ime | I/O | Električni Razina | Opis |
|
15 |
FWD |
I |
LVTTL |
Unos smjera brojača kilometara, premosnica ako se ne koristi. Strogo se preporuča korištenje High level=forwardLow level=backward
Napomena: Neispravni signali brojača kilometara dovest će do ozbiljnih problema u korištenju proizvoda. Provjerite je li signal ispravan. |
| 16 | NC | – | – | Rezervirano |
| 17 | NC | – | – | Rezervirano |
| 18 | NC | – | – | Rezervirano |
| 19 | NC | – | – | Rezervirano |
| 20 | TXD1 | O | LVTTL | UART 1-TX |
| 21 | RXD1 | I | LVTTL | UART 1-RX |
|
22 |
V_BCKP |
I |
1.65V~3.6V |
Sigurnosna kopija svtage napajanje, primjenjivo za vrući start. Ako ne koristite funkciju vrućeg pokretanja, spojite V_BCKP na VCC. NE spajajte ga na uzemljenje niti ga ostavljajte da pluta. |
| 23 | VCC | – | 3.0 V~3.6 V | Opskrba voltage |
| 24 | GND | – | – | Ground |
PCB pakiranje

U dizajnu PCB lemljenja, provjerite je li područje ispod modula serije UM220-INS potpuno prekriveno slojem lema.
Dizajn hardvera
Dizajn u razmatranjima
Potrebno je pravilno povezati sljedeće signale kako bi moduli serije UM220-INS radili ispravno. VCC modul ima dobru monotonost, a podbačaj i zvonjenje moraju biti zajamčeni unutar 5% VCC. Ako je VCC isključen i zatim ponovno pokrenut, vrijeme isključenja mora biti duže od 10 ms. Ako VCC napajanje ne može ispuniti gore navedene zahtjeve, postoji vjerojatnost da se modul UM220-INS neće normalno pokrenuti. Kada modul nije uključen, potrebno je osigurati da napajanje i GPIO (PPS, TX, RX, RESET) budu u stanju visoke impedancije ili niskoj razini kako bi se izbjegao nenormalan rad modula uzrokovan curenjem.
Ako se koristi serijski priključak 2 i puls u sekundi (1PPS), otpornik od 1KΩ mora biti spojen u seriju na TXD2 i otpornik od 4.7KΩ mora biti spojen u seriju na puls u sekundi (1PPS)
- Spojite sve GND pinove na uzemljenje.
- Osigurajte pouzdano napajanje za VCC pin.
- Spojite RF_IN signal na antenu i provjerite odgovara li impedancija od 50 Ω na krugu.
- Provjerite je li COM1 spojen na računalo ili vanjski procesor, korisnici mogu koristiti ovaj serijski priključak za primanje podataka o položaju. COM1 se također koristi za nadogradnju firmvera.
Obratite pozornost na sljedeće stavke u dizajnu kako biste postigli dobre performanse
- Napajanje: Stabilna i niska snaga valovitosti neophodna je za dobre performanse.
- Koristite LDO kako biste osigurali čistoću napajanja.
- Postavite LDO na modul što je moguće bliže rasporedu.
- Proširite ožičenje strujnog kruga ili upotrijebite bakrenu površinu za prijenos struje.
- Izbjegavajte hodanje kroz uređaje velike snage ili visoke induktivnosti kao što je magnetska zavojnica.
- Provjerite je li volumen od vrha do vrhatage valovitost ne prelazi 50mV.
- UART sučelja: osigurajte da su signali i brzina prijenosa podataka glavne opreme u skladu s modulima serije UM220-INS.
- Sučelje antene: pobrinite se da impedancija antene odgovara i da je strujni krug kratak i gladak, pokušajte izbjeći oštar kut.
- Pokušajte izbjeći krugove ispod modula serije UM220-INS.
- Ovaj modul je uređaj osjetljiv na temperaturu, brze promjene temperature rezultirat će smanjenim performansama, držite ga što je dalje moguće od bilo kojeg snažnog visokotemperaturnog zraka i uređaja za grijanje.
Antena
Ako moduli serije UM220-INS koriste +3V aktivnu antenu, preporučuje se korištenje VCC_RF pina za napajanje antene kroz induktor napajanja.

Bilješka: Ako korisnik ima visoke zahtjeve za ESD (> ± 2000 V), korisnik bi trebao razmotriti drugu metodu napajanja antene umjesto korištenja VCC_RF pina. U tom slučaju preporuča se odabrati čip napajanja s visokom razinom ESD zaštite. Cijev za pražnjenje plina, varistor, TVS cijev i drugi zaštitni uređaji velike snage također se mogu koristiti u strujnom krugu za dodatnu zaštitu modula od ESD oštećenja ili drugog električnog prenaprezanja (EOS). Ako moduli serije UM220-INS koriste aktivnu antenu koja nije +3V, vol.tage V_BIAS koji je potreban anteni koristi se za napajanje antene kroz induktor napajanja.

Ako moduli serije UM220-INS koriste pasivnu antenu, spojite antenu izravno na RF_IN, a VCC_RF može ostati neaktivan. Treba napomenuti da u usporedbi s aktivnim antenama, uporaba pasivnih antena može uzrokovati degradaciju performansi GNSS-a.

Serijski priključak
Serijski portovi modula serije UM220-INS su LVTTL razine, koristite RS232 pretvarač za PC vezu.

Priključak brojača kilometara
Moduli serije UM220-INS podržavaju signale smjera (FWD) i impulsa brzine (WHEELTICK) koji se povezuju s brojačem kilometara. Točnost putanje pozicioniranja modula mogla bi se poboljšati ako modul dobije učinkovite impulsne signale smjera i brzine. Signal brojača kilometara vozila općenito je 12 V, a kvaliteta signala je loša. Stoga je potrebno filtriranje signala, izolacija optokaplera i konverzija razine kako bi se signali brojača kilometara vozila prenijeli na UM220-INS NF za korištenje.

Koordinate sustava
Koordinate modula serije UM220-INS moraju biti u skladu s koordinatama vozila, u suprotnom morate izvršiti odgovarajuću konfiguraciju slijedeći naredbu CFGROTAT u odgovarajućem priručniku za protokol.


- Normalni smjer štita je os Z, duža os je Y, a kratka os je X.
- Koordinata modula mora biti u skladu s koordinatom vozila, što znači: X-os i R-os su paralelne u istom smjeru, Y-os i F-os su paralelne u istom smjeru, a Z-os i U- osi su paralelne u istom smjeru.
Instalacija modula
Moduli serije UM220-INS moraju biti kruto povezani s karoserijom vozila i čvrsto pričvršćeni.
- Antena treba biti instalirana s prednjom stranom okrenutom prema gore što je više moguće i čvrsto pričvršćena; uvjerite se da je kut elevacije okoline u kojoj se nalazi antena veći od 15° i da prostor nema prepreka.
- U okruženju u kojem se nalazi antena ne postoji jak izvor smetnji unutar frekvencije 1568± 20MHz.
Upute za instalaciju
Moduli serije UM220-INS moraju biti čvrsto povezani s vozilom kako bi se spriječilo bilo kakvo pomicanje ili vibracije između modula i vozila. Moduli serije UM220-INS ne smiju se ugrađivati u ovjesni dio vozila (s elastičnim dijelom). Kada se vozilo kreće, svaka promjena koordinatnog sustava vozila ozbiljno će utjecati na modul UM220-INS i onemogućiti mu normalan rad.
Definicija kuta ugradnje
Koordinata vozila je RFU, a koordinata modula je xyz, kao što je prikazano na slici 5-5 i slici 5-6. AngleR, angleF i angleU kuta ugradnje modula definirani su kako slijedi:
- Podudari početno stanje RFU koordinate s onom xyz koordinate
- Rotirajte γ kut modula duž osi z
- Rotirajte α kut modula duž nove x osi
- Rotirajte β kut modula duž nove y osi
- Modul je sada u istom stanju kao stvarna instalacija, s time da je kutR=α, kutF=β, kutU=γ

Mogućnosti instalacije modula
- Besplatna instalacija (zadani način)
Moduli serije UM220-INS integriraju troosni žiroskop i troosni akcelerometar, s ugrađenim algoritmom za samokalibraciju, koji podržava slobodnu ugradnju modula u odnosu na bilo koji kut ugradnje koordinatnog sustava vozila, kao npr. , potpuno horizontalna montaža, nagnuta montaža pod određenim kutem i preokretna montaža. - Fiksna instalacija
Prema definiciji kuta ugradnje, točan kut ugradnje se ručno konfigurira u modulu. Ova metoda instalacije zahtijeva kratko vrijeme kalibracije. Prilikom ručnog konfiguriranja kuta ugradnje, maksimalna pogreška kuta ograničena je na ± 5 stupnjeva.
Referentne poruke
CFGROTAT
- Format poruke: $ CFGROTAT,kutR, kutF, kutU, način
- Opis: Postavite ili ispišite konfiguracije kuta ugradnje modula u odnosu na koordinatni sustav vozila.
- Parametri:
- angleR, angleF i angleU, pogledajte 5.6.2 za detalje s jedinicom od 0.01°
- način, koji označava način konfiguracije kuta ugradnje:
0 – Opći način instalacije, ulazna vrijednost kuta instalacije je relativno gruba (unutar 10 stupnjeva)
2 – Automatski način instalacije, nije potreban kut instalacije.
Napomena
- Odaberite 2 za način besplatne instalacije i 0 za fiksnu instalaciju;
- Unesite stvarne kutove ugradnje uključujući kut R, kut F i kut U u modul. Nakon što je konfiguracija dovršena, spremite konfiguraciju na flash pomoću naredbe CFGSAVE, u suprotnom je potrebno ponovno identificirati pri sljedećem pokretanju.
- Bilo kakva konfiguracija na INS-u uzrokovat će ponovnu inicijalizaciju INS modula tijekom normalnog rada ili nakon isključivanja i ponovnog pokretanja, a prethodno dovršene ili tekuće operacije kalibracije bit će poništene.
SNRSTAT
- Format poruke: $SNRSTAT,insstatus,odostatus, InstallState, Mapstat
- Opis: Izlazni početni status (primjenjivo i za fiksni način instalacije i za besplatni način instalacije)
- Parametri:
insstatus: Početni status INS-a- 1: kvar IMU uređaja
- 0: Onemogućeno
- 1: inicijalizirano
- 2: Kut postavljanja je poznat
- 3: Inicijalizacija je dovršena
odostatus: status inicijalizacije brojača kilometara - 1: Kvar uređaja za brojač kilometara
- 0: Onemogućeno
- 1: Inicijalizirajte faktor razmjera
- 2: Inicijalizacija faktora razmjera je dovršena
- 3: Kalibracija faktora skale je dovršena
- InstallState
- Kvar IMU uređaja, nije moguće procijeniti kut instalacije
- U tijeku kalibracije
- Trenutna kvaliteta satelitskih informacija je nedovoljna i potrebni su bolji satelitski uvjeti
- Trenutačni manevarski uvjeti nosača su nedovoljni i potrebno ga je ubrzati
- Trenutna brzina nosača je preniska i potrebno ju je povećati.
- Mapstat:
- Nijedan serijski priključak nije konfiguriran za unos podataka o MAP-u
- Serijski priključak ne prima nijednu MAP poruku ili je poslana MAP poruka istekla
- MAP informacije se primaju, ali se ne primjenjuju na kompozitnu navigaciju
- MAP informacije se primaju i primjenjuju na kompozitnu navigaciju
- Potpuno besplatan test instalacije
- Instalirajte modul potpuno slobodno
- Unesite naredbu $CFGROTAT,0,0,0,2 (nije potrebna konfiguracija za tvornički način rada)
- Unesite naredbu $CFGSAVE (nije potrebna konfiguracija za tvornički način rada)
- Proces samokalibracije trebao bi zadovoljiti gore navedene uvjete parkiranja, kvalitete satelita i manevra, itd. Potvrdite je li samokalibracija dovršena putem izlaza $SNRSTAT, a kada insstatus postane 3, samokalibracija je dovršena.
- Provjerite je li samokalibracija dovršena i zatim uđite na cestu s lošom satelitskom kvalitetom.
- Ako je potrebna funkcija vrućeg pokretanja u podrumu, Vbackup zahtijeva kontinuirano napajanje;
Kalibracija modula i obavijest
Samokalibracija
Nakon instalacije modula serije UM220-INS, potrebna je samokalibracija kako bi se osigurala točnost izlaza modula. U procesu samokalibracije, modul procjenjuje parametre statusa instalacije i parametre senzora. Modul je u načinu rada pune satelitske navigacije prije dovršetka samokalibracije, au kompaktnom kombiniranom načinu rada satelitske navigacije i inercijalne navigacije nakon dovršetka samokalibracije.
Uvjeti za dovršetak samokalibracije
- Samokalibracija se pokreće nakon uključivanja, zaustavite se dulje od tri minute;
- Tijekom procesa samokalibracije potrebna je dobra satelitska vidljivost (broj vidljivih satelita nije manji od šest, a CN0 iznad 30dB), što je bolja kvaliteta satelitskog promatranja, to će kalibracija biti brža.
- Potrebno je izvršiti manevre zaokreta za 90 stupnjeva više od pet puta dok vozilo normalno radi.
- Držite brzinu vožnje naprijed iznad 36 km/h pod pretpostavkom normalne vožnje. Što je više puta ubrzanja (preporuča se voziti pri ubrzanju većem od 0.5 m/s na kvadrat ne manje od 10 puta) i što je duže vrijeme vožnje, to će kalibracija biti brža. Nakon prvog usklađivanja inercijske navigacije ( insstatus 3), i dalje je potrebno voziti oko 15 minuta u normalnom otvorenom okruženju kako bi se inercijski navigacijski uređaj adekvatno osposobio. Na primjerampNaime, preciznost navigacije može biti nešto lošija ako inercijski navigacijski uređaj uđe u složeno okruženje kao što su tunel i garaža odmah nakon prvog poravnanja.
Bilješka
- Normalna uporaba modula zahtijeva samo jedan proces samokalibracije.
- Nakon što je INS modul kalibriran, može se premjestiti tek nakon potpunog prekida napajanja, uključujući glavni VCC i rezervni V_BACKUP.
rastavljanje
Kada je potrebno ukloniti modul, preporuča se električnim lemilom otopiti lim za lemljenje pinova s obje strane modula i izvaditi modul pincetom. NEMOJTE koristiti druge načine za uklanjanje modula (nprample, modul je otpuhan pištoljem na vrući zrak), što može dovesti do oštećenja modula.
Paket
Označavanje proizvoda

Opis paketa
Moduli serije UM220-INS koriste noseću traku i kolut (pogodan za glavnu opremu za površinsku montažu), pakirane u vakuumski zatvorene antistatičke vrećice od aluminijske folije, sa sredstvom za sušenje iznutra za sprječavanje vlage. Kada koristite postupak zavarivanja reflow za zavarivanje modula, molimo vas da se strogo pridržavate IPC standarda za provođenje kontrole vlažnosti na modulima. Budući da materijali za pakiranje kao što je noseća traka mogu izdržati samo temperaturu od 65 stupnjeva Celzijusa, module je potrebno izvaditi iz pakiranja tijekom pečenja.

| Artikal | Opis |
| Modul | 500 slika/kolut |
|
Veličina koluta |
Ladica:13″
Vanjski promjer: 330 mm, unutarnji promjer: 100 mm, širina: 24 mm Debljina: 2.0mm |
| nosiva traka | Razmak između: 20 mm |
Moduli serije UM220 I NS ocijenjeni su na MSL razini 3, pogledajte relevantne IPC/JEDEC standarde za zahtjeve za pečenje. Molimo pristupite webmjesto www.jedec.org za preuzimanje za detalje. Rok trajanja modula serije UM220 INS je jedna godina.
Čist
NEMOJTE koristiti alkohol ili druga organska otapala za čišćenje, jer to može dovesti do nakupljanja fluka u zaštitnoj ljusci, uzrokujući plijesan i druge probleme.
Ponovno lemljenje
Kako bi se izbjeglo padanje uređaja, modul treba postaviti na vrh glavne ploče tijekom zavarivanja. Krivulja temperature reflow lemljenja se preporučuje kao što je prikazano na slici 9 1 u nastavku ( M 705 GRN 360 se preporučuje za pastu za lemljenje).
Bilješka: Modul se može zavariti samo jednom.

Bilješka: Otvori u šabloni trebaju zadovoljiti kupčeve vlastite zahtjeve dizajna i specifikacije inspekcije, a debljina šablone treba biti iznad 0.15 mm, a preporučuje se 0.18 mm.
Unicore Communications, Inc.
F3, No.7, Fengxian East Road, Haidian, Peking, PRChina, 100094
- www.unicorecomm.com
- Telefon: 86-10-69939800
- Faks: 86-10-69939888
- info@unicorecomm.com
- www.unicorecomm.com
Dokumenti / Resursi
 |
Unicore Comm UM220-INS Multi-GNSS integrirani modul za navigaciju i pozicioniranje [pdf] Korisnički priručnik UM220-INS Multi-GNSS integrirani modul za navigaciju i pozicioniranje, UM220-INS, Multi-GNSS integrirani modul za navigaciju i pozicioniranje, Modul za navigaciju i pozicioniranje, Modul za pozicioniranje |



