EMKO PROOP 输入或输出模块

前言
Proop-I/O 模块与 Prop 设备一起使用。 它还可以用作任何品牌的数据路径。 本文档将帮助用户安装和连接 Proop-I/O 模块。
- 在开始安装本产品之前,请阅读使用说明书。
- 文档的内容可能已更新。 您可以访问最新版本 www.emkoelektronik.com.tr
- 该符号用于安全警告。 用户必须注意这些警告。
环境条件
| 工作温度: | 0-50C |
| 最大湿度 : | 0-90 %RH(无冷凝) |
| 重量 : | 238克 |
| 尺寸 : | 160 x 90 x 35 毫米 |
特征
Proop-I/O模块根据输入输出分为几种类型。 种类如下。
| 产品类型
Proop-I/OP |
A |
. |
B |
. |
C |
. |
D |
. |
E |
. |
F |
| 2 | 2 | 1 | 3 | ||||||||
| 模组供应 | |||||||||||
| 24 Vdc/Vac(隔离) | 2 | |||
| 沟通 | ||||
| RS-485(隔离) | 2 | |||
| 数字输入 | ||||
| 8x 数字 | 1 | |||
| 数字输出 | ||||
| 8x 1A 晶体管 (+V) | 3 | |||
| 模拟输入 | ||||
| 5x Pt-100 (-200…650°C)
5x 0/4..20mAdc 5x 0…10Vdc 5x 0…50mV |
1 | ||
| 2 | |||
| 3 | |||
| 4 | |||
| 模拟输出 | |||
| 2x 0/4…20mAdc
2x 0…10Vdc |
1 | ||
| 2 | |||
方面
在 Proop 设备上安装模块
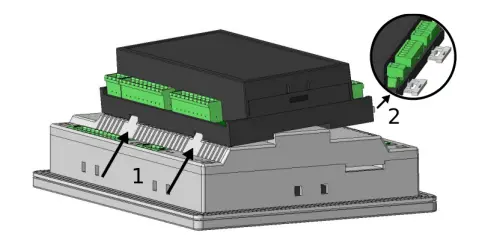 |
1- 如图所示,将道具 I/O 模块插入道具设备的孔中。
2- 检查锁定部件是否插入 Proop-I/O 模块设备并拔出。 |
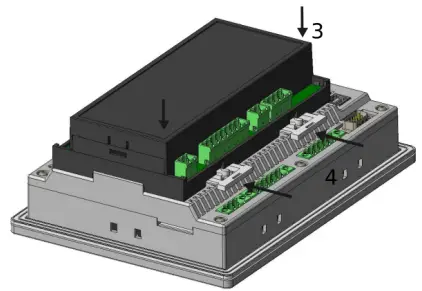 |
3- 按指定方向用力按压 Proop-I/O Module 装置。
4- 将锁定部件推入以插入。 |
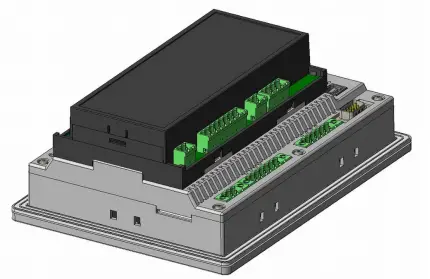 |
5- 插入的模块设备图像应如左图所示。 |
在 DIN-Ray 上安装模块
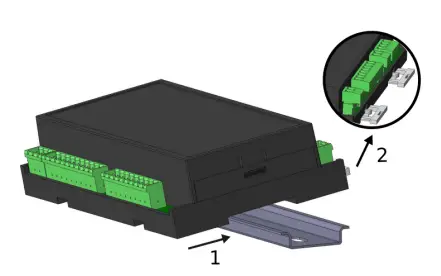 |
1- 如图所示,将 Proop-I/O 模块设备拖到 DIN-ray 上。
2- 检查锁定部件是否已插入 Prop-I/O 模块设备并已拔出。 |
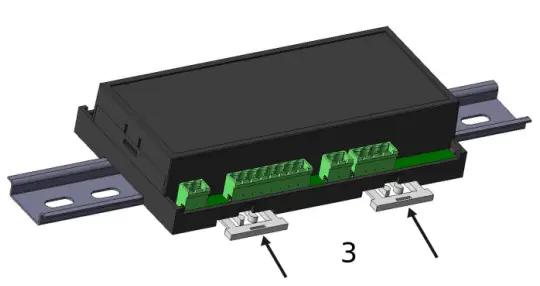 |
3- 将锁定部件推入以插入。 |
 |
4- 插入的模块设备图像应如左图所示。 |
安装
- 在开始安装本产品之前,请仔细阅读使用说明书和以下警告。
- 建议在安装前目视检查本产品在运输过程中可能发生的损坏。 您有责任确保由合格的机械和电气技术人员安装该产品。
- 请勿在易燃或易爆气体环境中使用本装置。
- 请勿将设备暴露在直射阳光下或任何其他热源下。
- 请勿将本机放置在变压器、电机等磁性设备或产生干扰的设备(电焊机等)附近
- 为减少电噪声对设备的影响,Low voltage线(尤其是传感器输入线)接线必须与大电流和vol分开tage线。
- 在面板内安装设备时,金属部件的锋利边缘可能会割伤手,请小心使用。
- 产品的安装必须使用其自己的安装 clamps.
- 不要使用不合适的 cl 安装设备amp秒。 安装过程中请勿掉落设备。
- 如果可能,请使用屏蔽电缆。 为防止接地回路,屏蔽层应仅在一端接地。
- 为防止触电或损坏设备,在完成所有接线之前不要给设备通电。
- 数字输出和电源连接设计为相互隔离。
- 在调试设备之前,必须根据所需的用途设置参数。
- 不完整或不正确的配置可能很危险。
- 该装置通常不带电源开关、保险丝或断路器。 按照当地法规的要求使用电源开关、保险丝和断路器。
- 仅适用于额定电源电压tage 到机组,防止设备损坏。
- 如果存在因本机故障或缺陷导致严重事故的危险,请关闭系统电源并断开设备与系统的连接。
- 切勿尝试拆卸、改装或修理本装置。 吨amp否则可能会导致故障、触电或火灾。
- 如有任何与本机安全操作相关的问题,请联系我们。
- 本设备必须按照本说明手册中指定的方式使用。
連接
电源
 |
终端 |
| + | |
|
– |
与 HMI 设备的通信链接
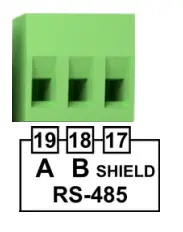 |
终端 |
| A | |
| B | |
| 地线 |
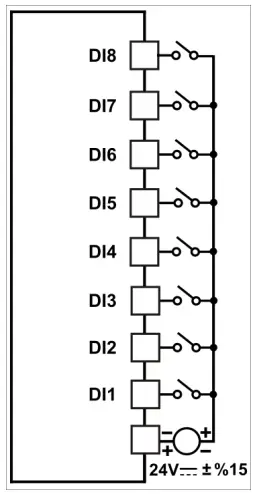
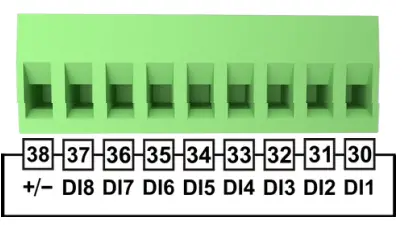
数字输入
|
|
终端 | 评论 | 连接方案 |
| DI8 |
数字输入 |
 |
|
| DI7 | |||
| DI6 | |||
| DI5 | |||
| DI4 | |||
| DI3 | |||
| DI2 | |||
| DI1 | |||
|
+/- |
NPN/即插即用
数字输入的选择 |
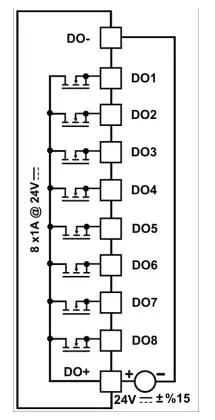
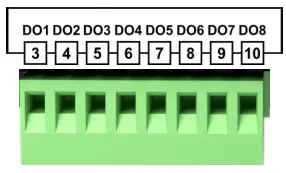
数字输出
|
|
终端 | 评论 | 连接方案 |
| DO1 |
数字输出 |
 |
|
| DO2 | |||
| DO3 | |||
| DO4 | |||
| DO5 | |||
| DO6 | |||
| DO7 | |||
| DO8 |
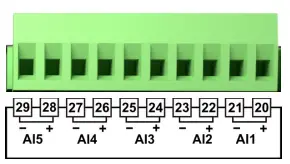
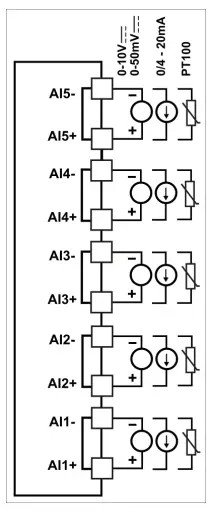
模拟输入
|
终端 | 评论 | 连接方案 |
| AI5- |
模拟输入5 |
 |
|
| 人工智能5+ | |||
| AI4- |
模拟输入4 |
||
| 人工智能4+ | |||
| AI3- |
模拟输入3 |
||
| 人工智能3+ | |||
| AI2- |
模拟输入2 |
||
| 人工智能2+ | |||
| AI1- |
模拟输入1 |
||
| 人工智能1+ |
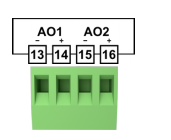
模拟输出
|
|
终端 | 评论 | 连接方案 |
|
奥+ |
模拟输出电源 |
 |
|
|
AO |
|||
|
AO1 |
模拟输出 |
||
|
AO2 |
技术特点
电源
| 电源 | : | 24伏直流电压 |
| 允许范围 | : | 20.4 – 27.6 伏直流电 |
| 功耗 | : | 3W |
数字输入
| 数字输入 | : | 8输入 | |
| 标称输入电压tage | : | 24 伏直流电 | |
|
输入音量tage |
: |
对于逻辑 0 | 对于逻辑 1 |
| < 5 伏直流 | >10 伏直流电 | ||
| 输入电流 | : | 最大6mA | |
| 输入阻抗 | : | 5.9千欧姆 | |
| 响应时间 | : | '0' 到 '1' 50ms | |
| 电流隔离 | : | 500 VAC 1 分钟 | |
高速计数器输入
| HSC 输入 | : | 2路输入(HSC1:DI1和DI2,HSC2:DI3和DI4) | |
| 标称输入电压tage | : | 24 伏直流电 | |
|
输入音量tage |
: |
对于逻辑 0 | 对于逻辑 1 |
| < 10 伏直流 | >20 伏直流电 | ||
| 输入电流 | : | 最大6mA | |
| 输入阻抗 | : | 5.6千欧姆 | |
| 频率范围 | : | 最大 15KHz 单相最大 10KHz 用于双相 | |
| 电流隔离 | : | 500 VAC 1 分钟 | |
数字输出
| 数字输出 | 8输出 | |
| 输出电流 | : | 1 最大。 (最大总电流 8 A) |
| 电流隔离 | : | 500 VAC 1 分钟 |
| 短路保护 | : | 是的 |
模拟输入
| 模拟输入 | : | 5输入 | |||
|
输入阻抗 |
: |
PT-100 | 0/4-20毫安 | 0-10伏 | 0-50mV |
| -200oC-650oC | 100Ω | >6.6kΩ | >10MΩ | ||
| 电流隔离 | : | 不 | |||
| 解决 | : | 14 位 | |||
| 准确性 | : | ±0,25% | |||
| Samp时间 | : | 250 毫秒 | |||
| 状态指示 | : | 是的 | |||
模拟输出
|
模拟输出 |
: |
2输出 | |
| 0/4-20mA | 0-10伏 | ||
| 电流隔离 | : | 不 | |
| 解决 | : | 12 位 | |
| 准确性 | : | 满量程的 1% | |
内部地址定义
通讯设置:
| 参数 | 地址 | 选项 | 默认 |
| ID | 40001 | 1–255 | 1 |
| 波特率 | 40002 | 0- 1200 / 1- 2400 / 2- 4000 / 3- 9600 / 4- 19200 / 5- 38400 /
6- 57600 /7- 115200 |
6 |
| 停止位 | 40003 | 0-1位/1-2位 | 0 |
| 平价 | 40004 | 0- 无 / 1- 偶数 / 2- 奇数 | 0 |
设备地址:
| 记忆 | 格式 | 排列 | 地址 | 类型 |
| 数字输入 | 丁 | 数:0 – 7 | 10001 – 10008 | 读 |
| 数字输出 | 大学教师 | 数:0 – 7 | 1 – 8 | 读写 |
| 模拟输入 | 铟 | 数:0 – 7 | 30004 – 30008 | 读 |
| 模拟输出 | 奥恩 | 数:0 – 1 | 40010 – 40011 | 读写 |
| 版本* | (aaabbbbcccccccc)少量 | 数量:0 | 30001 | 读 |
- 笔记:该地址中的a位为主,b位为次版本号,c位表示设备类型。
- Examp乐: 从 30001 (0x2121)hex = (0010000100100001)bit 读取的值,
- a bits (001)bit = 1(主版本号)
- b bits (00001)bit = 1(次版本号)
- c 位 (00100001) 位 = 33(设备类型在表中指示。)设备版本 = V1.1
- 设备类型 = 0-10V 模拟输入 0-10V 模拟输出
设备类型:
| 设备类型 | 价值 |
| PT100 模拟输入 4-20mA 模拟输出 | 0 |
| PT100 模拟输入 0-10V 模拟输出 | 1 |
| 4-20mA 模拟输入 4-20mA 模拟输出 | 16 |
| 4-20mA 模拟输入 0-10V 模拟输出 | 17 |
| 0-10V 模拟输入 4-20mA 模拟输出 | 32 |
| 0-10V 模拟输入 0-10V 模拟输出 | 33 |
| 0-50mV 模拟输入 4-20mA 模拟输出 | 48 |
| 0-50mV 模拟输入 0-10V 模拟输出 | 49 |
根据模拟量输入类型从模块读取的值的转换如下表所示:
| 模拟输入 | 价值范围 | 转换 因素 | ExampPROOP 中显示的值 |
|
PT-100 -200° – 650° |
-2000 – 6500 |
x10–1 |
Example-1: 读取值为 100 转换为 10oC. |
| Example-2: 读取值为 203 转换为 20.3oC. | |||
| 0 – 10伏 | 0 – 20000 | 0.5×10–3 | Example-1:读取值为 2500 转换为 1.25V。 |
| 0 – 50mV | 0 – 20000 | 2.5×10–3 | Example-1:读取值为 3000 转换为 7.25mV。 |
|
0/4 – 20毫安 |
0 – 20000 |
0.1×10–3 |
Example-1:读取值为 3500 转换为 7mA。 |
| Example-2:读取值为 1000 转换为 1mA。 |
下表描述了根据模拟量输出类型在模块中写入的值的转换:
| 模拟输出 | 价值范围 | 转换 速度 | Examp写入模块的价值文件 |
| 0 – 10伏 | 0 – 10000 | x103 | Example-1:将要写入的值1.25V转换为1250。 |
| 0/4 – 20毫安 | 0 – 20000 | x103 | Example-1:将要写入的值 1.25mA 转换为 1250。 |
模拟输入特定地址:
| 范围 | AI1 | AI2 | AI3 | AI4 | AI5 | 默认 |
| 配置 位 | 40123 | 40133 | 40143 | 40153 | 40163 | 0 |
| 最小刻度值 | 40124 | 40134 | 40144 | 40154 | 40164 | 0 |
| 最大刻度值 | 40125 | 40135 | 40145 | 40155 | 40165 | 0 |
| 缩放值 | 30064 | 30070 | 30076 | 30082 | 30088 | – |
模拟输入配置位:
| AI1 | AI2 | AI3 | AI4 | AI5 | 描述 |
| 40123.0少量 | 40133.0少量 | 40143.0少量 | 40153.0少量 | 40163.0少量 | 4-20mA/2-10V 选择:
0 = 0-20 毫安/0-10 伏 1 = 4-20 毫安/2-10 伏 |
模拟输入的换算值是根据 4-20mA / 2-10V 选择配置位的状态计算的。
模拟输出特定地址:
| 范围 | AO1 | AO2 | 默认 |
| 输入的最小刻度值 | 40173 | 40183 | 0 |
| 输入的最大刻度值 | 40174 | 40184 | 20000 |
| 输出的最小刻度值 | 40175 | 40185 | 0 |
| 输出的最大刻度值 | 40176 | 40186 | 10000/20000 |
| 模拟输出功能
0:手动使用 1:使用上面的比例值,它反映了输入到输出。 2:它驱动模拟输出作为 PID 输出,使用输出的最小和最大刻度参数。 |
40177 | 40187 | 0 |
- 如果模拟量输出功能参数设置为1或2;
- AI1 用作 A01 输出的输入。
- AI2 用作 A02 输出的输入。
- 不是: 镜像输入到输出功能(模拟输出功能 = 1)不能用于具有 PT100 输入的模块。
HSC(高速计数器)设置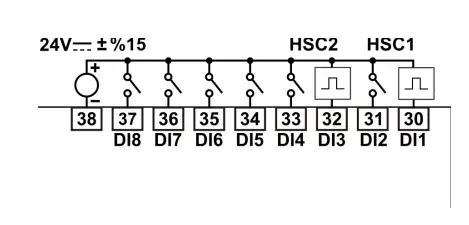
单相计数器连接
- 高速计数器对无法以 PROOP-IO 扫描速率控制的高速事件进行计数。 高速计数器的最大计数频率对于编码器输入为 10kHz,对于计数器输入为 15kHz。
- 计数器有五种基本类型:内部方向控制的单相计数器、外部方向控制的单相计数器、2个时钟输入的两相计数器、A/B相正交计数器和频率测量型。
- 笔记 每个计数器都不支持每种模式。 您可以使用除频率测量类型之外的每种类型:无复位或启动输入、有复位但无启动、或有启动和复位输入。
- 当您激活复位输入时,它会清除当前值并保持清除状态,直到您取消激活复位。
- 当您激活启动输入时,它允许计数器计数。 停用启动时,计数器的当前值保持不变,时钟事件将被忽略。
- 如果在启动未激活时激活重置,则忽略重置并且不更改当前值。 如果在复位输入激活时启动输入激活,则当前值被清除。
| 参数 | 地址 | 默认 |
| HSC1 配置模式选择* | 40012 | 0 |
| HSC2 配置模式选择* | 40013 | 0 |
| HSC1 新当前值(最低有效 16 字节) | 40014 | 0 |
| HSC1 新当前值(最高 16 字节) | 40015 | 0 |
| HSC2 新当前值(最低有效 16 字节) | 40016 | 0 |
| HSC2 新当前值(最高 16 字节) | 40017 | 0 |
| HSC1 当前值(最低有效 16 字节) | 30010 | 0 |
| HSC1 当前值(最高 16 字节) | 30011 | 0 |
| HSC2 当前值(最低有效 16 字节) | 30012 | 0 |
| HSC2 当前值(最高 16 字节) | 30013 | 0 |
笔记: 这个参数;
- 最低有效字节是模式参数。
- 最重要的字节是配置参数。
HSC配置说明:
| HSC1 | HSC2 | 描述 |
| 40012.8少量 | 40013.8少量 | 复位的有效电平控制位:
0 = 复位低电平有效 1 = 复位高电平有效 |
| 40012.9少量 | 40013.9少量 | Start 的有效电平控制位:
0 = 启动低电平有效 1 = 启动高电平有效 |
| 40012.10少量 | 40013.10少量 | 计数方向控制位:
0 = 向下计数 1 = 向上计数 |
| 40012.11少量 | 40013.11少量 | 将新的当前值写入 HSC:
0 = 不更新 1 = 更新当前值 |
| 40012.12少量 | 40013.12少量 | 启用 HSC:
0 = 禁用 HSC 1 = 启用 HSC |
| 40012.13少量 | 40013.13少量 | 预订 |
| 40012.14少量 | 40013.14少量 | 预订 |
| 40012.15少量 | 40013.15少量 | 预订 |
HSC 模式:
| 模式 | 描述 | 输入 | |||
| HSC1 | DI1 | DI2 | DI5 | DI6 | |
| HSC2 | DI3 | DI4 | DI7 | DI8 | |
| 0 | 带内部方向的单相计数器 | 钟 | |||
| 1 | 钟 | 重置 | |||
| 2 | 钟 | 重置 | 开始 | ||
| 3 | 带外部方向的单相计数器 | 钟 | 方向 | ||
| 4 | 钟 | 方向 | 重置 | ||
| 5 | 钟 | 方向 | 重置 | 开始 | |
| 6 | 具有 2 个时钟输入的两相计数器 | 打卡 | 时钟下降 | ||
| 7 | 打卡 | 时钟下降 | 重置 | ||
| 8 | 打卡 | 时钟下降 | 重置 | 开始 | |
| 9 | A/B 相编码器计数器 | 时钟A | 时钟B | ||
| 10 | 时钟A | 时钟B | 重置 | ||
| 11 | 时钟A | 时钟B | 重置 | 开始 | |
| 12 | 预订 | ||||
| 13 | 预订 | ||||
| 14 | 周期测量(10 μs samp时间) | 期间输入 | |||
| 15 | 柜台 /
周期 Ölçümü (1ms samp时间) |
最大限度。 15 赫兹 | 最大限度。 15 赫兹 | 最大限度。 1 赫兹 | 最大限度。 1 赫兹 |
模式 15 的特定地址:
| 范围 | DI1 | DI2 | DI3 | DI4 | DI5 | DI6 | DI7 | DI8 | 默认 |
| 配置 位 | 40193 | 40201 | 40209 | 40217 | 40225 | 40233 | 40241 | 40249 | 2 |
| 周期重置时间(1-1000 sn) |
40196 |
40204 |
40212 |
40220 |
40228 |
40236 |
40244 |
40252 |
60 |
| 计数器低位 16 位值 | 30094 | 30102 | 30110 | 30118 | 30126 | 30134 | 30142 | 30150 | – |
| 计数器高 16 位值 | 30095 | 30103 | 30111 | 30119 | 30127 | 30135 | 30143 | 30151 | – |
| 周期低16位值(ms) | 30096 | 30104 | 30112 | 30120 | 30128 | 30136 | 30144 | 30152 | – |
| 周期高16位值(ms) | 30097 | 30105 | 30113 | 30121 | 30129 | 30137 | 30145 | 30153 | – |
配置 位:
| DI1 | DI2 | DI3 | DI4 | DI5 | DI6 | DI7 | DI8 | 描述 |
| 40193.0少量 | 40201.0少量 | 40209.0少量 | 40217.0少量 | 40225.0少量 | 40233.0少量 | 40241.0少量 | 40249.0少量 | DIx使能位: 0 = DIx 启用 1 = DIx 禁用 |
|
40193.1少量 |
40201.1少量 |
40209.1少量 |
40217.1少量 |
40225.1少量 |
40233.1少量 |
40241.1少量 |
40249.1少量 |
计数方向位:
0 = 向下计数 1 = 向上计数 |
| 40193.2少量 | 40201.2少量 | 40209.2少量 | 40217.2少量 | 40225.2少量 | 40233.2少量 | 40241.2少量 | 40249.2少量 | 预订 |
| 40193.3少量 | 40201.3少量 | 40209.3少量 | 40217.3少量 | 40225.3少量 | 40233.3少量 | 40241.3少量 | 40249.3少量 | DIx 计数复位位:
1 = 重置 DIx 计数器 |
PID 设置
通过设置为模块中的每个模拟输入确定的参数,可以使用 PID 或开/关控制功能。 激活 PID 或 ON/OFF 功能的模拟输入控制相应的数字输出。 与激活 PID 或 ON/OFF 功能的通道关联的数字输出不能手动驱动。
- 模拟输入 AI1 控制数字输出 DO1。
- 模拟输入 AI2 控制数字输出 DO2。
- 模拟输入 AI3 控制数字输出 DO3。
- 模拟输入 AI4 控制数字输出 DO4。
- 模拟输入 AI5 控制数字输出 DO5。
PID参数:
| 范围 | 描述 |
| PID 激活 | 启用 PID 或 ON/OFF 操作。
0 = 手动使用 1 = PID 激活 2 = ON/OFF 激活 |
| 设定值 | 它是 PID 或 ON/OFF 操作的设定值。 对于输入,PT100 值可以介于 -200.0 和 650.0 之间,对于其他类型,可以介于 0 和 20000 之间。 |
| 设置偏移 | 它用作 PID 操作中的 Set Offset 值。 它可以取 -325.0 和
PT325.0 输入为 100,其他类型为 -10000 至 10000。 |
| 设置迟滞 | 它在 ON/OFF 操作中用作设置滞后值。 它可以取值介于
-325.0 和 325.0 用于 PT100 输入,-10000 至 10000 用于其他类型。 |
| 最小刻度值 | 工作尺度是下限值。 PT100 值可以介于 -200.0 和
输入为 650.0,其他类型为 0 和 20000。 |
| 最大刻度值 | 工作比例为上限值。 PT100 值可以介于 -200.0 和
输入为 650.0,其他类型为 0 和 20000。 |
| 加热比例值 | 加热的比例值。 它可以取 0.0 到 100.0 之间的值。 |
| 采暖积分值 | 加热的积分值。 它可以取 0 到 3600 秒之间的值。 |
| 热导值 | 加热的微分值。 它可以取 0.0 到 999.9 之间的值。 |
| 冷却比例值 | 冷却比例值。 它可以取 0.0 到 100.0 之间的值。 |
| 制冷积分值 | 冷却的整体价值。 它可以取 0 到 3600 秒之间的值。 |
| 冷却微分值 | 冷却的微分值。 它可以取 0.0 到 999.9 之间的值。 |
| 输出周期 | 输出是控制周期。 它可以采用 1 到 150 秒之间的值。 |
| 加热/冷却选择 | 指定 PID 或 ON/OFF 的通道操作。 0 = 加热 1 = 冷却 |
| 自动调整 | 启动 PID 的自动调节操作。
0 = 自动调谐被动 1 = 自动调谐主动 |
- 笔记: 对于点号表示的值,在 Modbus 通信中使用这些参数实际值的 10 倍。
PID Modbus 地址:
| 范围 | AI1
地址 |
AI2
地址 |
AI3
地址 |
AI4
地址 |
AI5
地址 |
默认 |
| PID 激活 | 40023 | 40043 | 40063 | 40083 | 40103 | 0 |
| 设定值 | 40024 | 40044 | 40064 | 40084 | 40104 | 0 |
| 设置偏移 | 40025 | 40045 | 40065 | 40085 | 40105 | 0 |
| 传感器偏移 | 40038 | 40058 | 40078 | 40098 | 40118 | 0 |
| 设置迟滞 | 40026 | 40046 | 40066 | 40086 | 40106 | 0 |
| 最小刻度值 | 40027 | 40047 | 40067 | 40087 | 40107 | 0/-200.0 |
| 最大刻度值 | 40028 | 40048 | 40068 | 40088 | 40108 | 20000/650.0 |
| 加热比例值 | 40029 | 40049 | 40069 | 40089 | 40109 | 10.0 |
| 采暖积分值 | 40030 | 40050 | 40070 | 40090 | 40110 | 100 |
| 热导值 | 40031 | 40051 | 40071 | 40091 | 40111 | 25.0 |
| 冷却比例值 | 40032 | 40052 | 40072 | 40092 | 40112 | 10.0 |
| 制冷积分值 | 40033 | 40053 | 40073 | 40093 | 40113 | 100 |
| 冷却微分值 | 40034 | 40054 | 40074 | 40094 | 40114 | 25.0 |
| 输出周期 | 40035 | 40055 | 40075 | 40095 | 40115 | 1 |
| 加热/冷却选择 | 40036 | 40056 | 40076 | 40096 | 40116 | 0 |
| 自动调整 | 40037 | 40057 | 40077 | 40097 | 40117 | 0 |
| PID瞬时输出值(%) | 30024 | 30032 | 30040 | 30048 | 30056 | – |
| PID 状态位 | 30025 | 30033 | 30041 | 30049 | 30057 | – |
| PID 配置位 | 40039 | 40059 | 40079 | 40099 | 40119 | 0 |
| 自动调谐状态位 | 30026 | 30034 | 30042 | 30050 | 30058 | – |
PID 配置位:
| AI1 地址 | AI2 地址 | AI3 地址 | AI4 地址 | AI5 地址 | 描述 |
| 40039.0少量 | 40059.0少量 | 40079.0少量 | 40099.0少量 | 40119.0少量 | PID暂停:
0 = PID 操作继续。 1 = PID 停止,输出关闭。 |
PID 状态位:
| AI1 地址 | AI2 地址 | AI3 地址 | AI4 地址 | AI5 地址 | 描述 |
| 30025.0少量 | 30033.0少量 | 30041.0少量 | 30049.0少量 | 30057.0少量 | PID计算状态:
0 = 计算 PID 1 = 不计算 PID。 |
|
30025.1少量 |
30033.1少量 |
30041.1少量 |
30049.1少量 |
30057.1少量 |
积分计算状态:
0 = 计算积分 1 = 不计算积分 |
自动调谐状态位:
| AI1 地址 | AI2 地址 | AI3 地址 | AI4 地址 | AI5 地址 | 描述 |
| 30026.0少量 | 30034.0少量 | 30042.0少量 | 30050.0少量 | 30058.0少量 | Auto Tune 第一步状态:
1 = 第一步处于活动状态。 |
| 30026.1少量 | 30034.1少量 | 30042.1少量 | 30050.1少量 | 30058.1少量 | Auto Tune 第二步状态:
1 = 第二步激活。 |
| 30026.2少量 | 30034.2少量 | 30042.2少量 | 30050.2少量 | 30058.2少量 | Auto Tune 第三步状态:
1 = 第三步激活。 |
| 30026.3少量 | 30034.3少量 | 30042.3少量 | 30050.3少量 | 30058.3少量 | Auto Tune 最后一步状态:
1 = 自动调谐完成。 |
| 30026.4少量 | 30034.4少量 | 30042.4少量 | 30050.4少量 | 30058.4少量 | 自动调整超时错误:
1 = 超时。 |
默认安装通信设置
对于版本为 V01 的卡;
- 关闭 I/O 模块设备。
- 提起设备的盖子。
- 将图中所示插座上的引脚 2 和引脚 4 短路。
- 通电等待至少 2 秒。 2 秒后,通讯设置将返回默认值。
- 去掉短路。
- 关闭设备盖。
对于版本为 V02 的卡;
- 关闭 I/O 模块设备。
- 提起设备的盖子。
- 在图中所示的插座上放置一个跳线。
- 通电等待至少 2 秒。 2 秒后,通讯设置将返回默认值。
- 卸下跳线。
- 关闭设备盖。
Modbus 从站地址选择
从站地址可以在 modbus 的地址 1 中设置为 255 到 40001。 此外,卡上的Dip Switch 可用于设置V02 卡上的从机地址。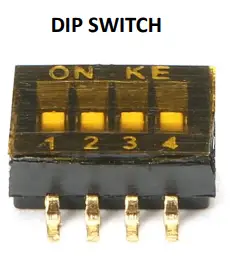
| 拨码开关 | ||||
| 奴隶 ID | 1 | 2 | 3 | 4 |
| Not1 | ON | ON | ON | ON |
| 1 | 离开 | ON | ON | ON |
| 2 | ON | 离开 | ON | ON |
| 3 | 离开 | 离开 | ON | ON |
| 4 | ON | ON | 离开 | ON |
| 5 | 离开 | ON | 离开 | ON |
| 6 | ON | 离开 | 离开 | ON |
| 7 | 离开 | 离开 | 离开 | ON |
| 8 | ON | ON | ON | 离开 |
| 9 | 离开 | ON | ON | 离开 |
| 10 | ON | 离开 | ON | 离开 |
| 11 | 离开 | 离开 | ON | 离开 |
| 12 | ON | ON | 离开 | 离开 |
| 13 | 离开 | ON | 离开 | 离开 |
| 14 | ON | 离开 | 离开 | 离开 |
| 15 | 离开 | 离开 | 离开 | 离开 |
- 注1: 当所有 Dip 开关都打开时,Modbus 寄存器 40001 中的值用作从地址。
保修单
本产品自交付给买方之日起两年内不会出现材料和工艺缺陷。 保修仅限于根据制造商的选择修理或更换有缺陷的装置。 如果产品被改动、误用、拆卸或以其他方式滥用,则此保修无效。
维护
维修只能由经过培训的专业人员进行。 在接触内部零件之前切断设备的电源。 请勿使用碳氢化合物溶剂(汽油、三氯乙烯等)清洁外壳。 使用这些溶剂会降低设备的机械可靠性。
其他信息
- 制造商信息:
- Emko Elektronik Sanayi 和 Ticaret A.Ş.
- 布尔萨组织 Sanayi Bölgesi,(费特希耶 OSB Mah.)
- Ali Osman Sönmez Bulvarı,2. 索卡克,编号:3 16215
- 布尔萨/土耳其
- 电话 : (224) 261 1900
- 传真: (224) 261 1912
- 维修保养服务信息:
- Emko Elektronik Sanayi 和 Ticaret A.Ş.
- 布尔萨组织 Sanayi Bölgesi,(费特希耶 OSB Mah.)
- Ali Osman Sönmez Bulvarı,2. 索卡克,编号:3 16215
- 布尔萨/土耳其
- 电话 : (224) 261 1900
- 传真: (224) 261 1912
文件/资源
 |
EMKO PROOP 输入或输出模块 [pdf] 用户手册 PROOP, 输入或输出模块, PROOP 输入或输出模块, 输入模块, 输出模块, 模块 |



