Módulo de entrada o salida EMKO PROOP

Prefacio
El módulo Proop-I/O se usa con el dispositivo Prop. También se puede utilizar como ruta de datos para cualquier marca. Este documento será útil para que el usuario instale y conecte el módulo Proop-I/O.
- Antes de comenzar la instalación de este producto, lea el manual de instrucciones.
- El contenido del documento puede haber sido actualizado. Puede acceder a la versión más actualizada en www.emkoelektronik.com.tr
- Este símbolo se utiliza para advertencias de seguridad. El usuario debe prestar atención a estas advertencias.
Condiciones ambientales
| Temperatura de funcionamiento : | 0-50C |
| Humedad Máxima : | 0-90 %HR (sin condensación) |
| Peso : | 238 gramos |
| Dimensión : | 160 x 90 x 35 mm |
Características
Los módulos Proop-I/O se dividen en varios tipos según las entradas-salidas. Los tipos son los siguientes.
| Tipo de producto
Proop-I/OP |
A |
. |
B |
. |
C |
. |
D |
. |
E |
. |
F |
| 2 | 2 | 1 | 3 | ||||||||
| Suministro de módulos | |||||||||||
| 24 Vdc/Vac (Aislamiento) | 2 | |||
| Comunicación | ||||
| RS-485 (Aislamiento) | 2 | |||
| Entradas digitales | ||||
| 8x Digital | 1 | |||
| Salidas digitales | ||||
| 8 transistores 1A (+V) | 3 | |||
| Entradas Analógicas | ||||
| 5x Pt-100 (-200…650°C)
5x 0/4..20mAdc 5x 0…10Vdc 5x 0…50mV |
1 | ||
| 2 | |||
| 3 | |||
| 4 | |||
| Salidas analógicas | |||
| 2x 0/4…20mAcc
2x 0…10Vcc |
1 | ||
| 2 | |||
Dimensiones
Montaje del módulo en el dispositivo Proop
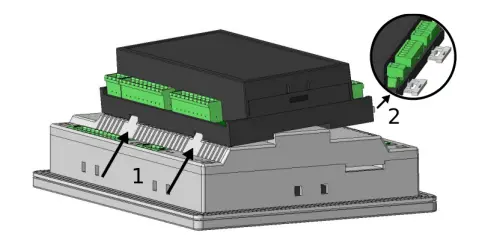 |
1- Inserte el módulo Prop I/O en los orificios del dispositivo Prop como se muestra en la imagen.
2- Compruebe que las piezas de bloqueo estén enchufadas en el dispositivo del módulo Proop-I/O y extraídas. |
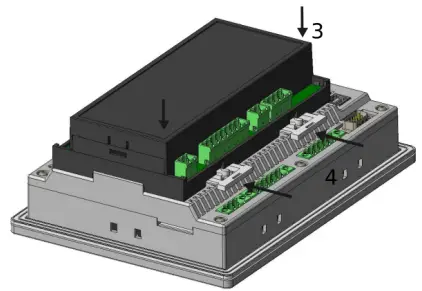 |
3- Presione firmemente el dispositivo Proop-I/O Module en la dirección especificada.
4- Inserte las piezas de bloqueo empujándolas hacia adentro. |
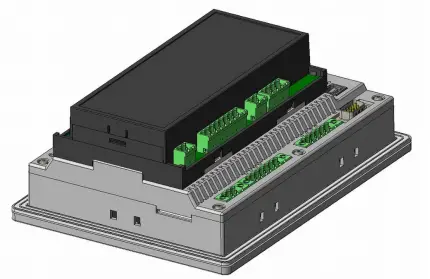 |
5- La imagen insertada del dispositivo del módulo debe parecerse a la de la izquierda. |
Montaje de Módulo en DIN-Ray
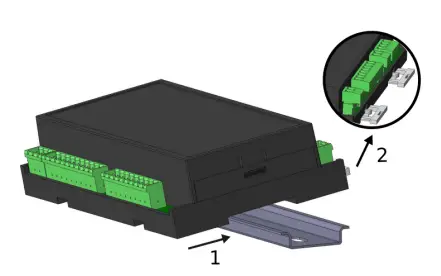 |
1- Arrastre el dispositivo Proop-I/O Module al DIN-ray como se muestra.
2- Verifique que las piezas de bloqueo estén enchufadas en el dispositivo Prop-I/O Module y extraídas. |
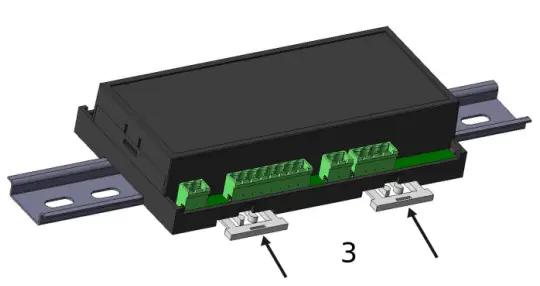 |
3- Inserte las piezas de bloqueo empujándolas hacia adentro. |
 |
4- La imagen insertada del dispositivo del módulo debe parecerse a la de la izquierda. |
Instalación
- Antes de comenzar la instalación de este producto, lea atentamente el manual de instrucciones y las advertencias a continuación.
- Se recomienda una inspección visual de este producto por posibles daños ocurridos durante el envío antes de la instalación. Es su responsabilidad asegurarse de que técnicos mecánicos y eléctricos calificados instalen este producto.
- No utilice la unidad en atmósferas gaseosas combustibles o explosivas.
- No exponga la unidad a los rayos directos del sol ni a ninguna otra fuente de calor.
- No coloque la unidad cerca de equipos magnéticos como transformadores, motores o dispositivos que generen interferencias (máquinas de soldar, etc.)
- Para reducir el efecto del ruido eléctrico en el dispositivo, Low voltagEl cableado de la línea (especialmente el cable de entrada del sensor) debe estar separado de los de alta corriente y vol.tage línea.
- Durante la instalación del equipo en el panel, los bordes afilados de las partes metálicas pueden causar cortes en las manos, tenga cuidado.
- El montaje del producto debe realizarse con su propia placa de montaje.amps.
- No monte el dispositivo con cl inapropiadoamps. No deje caer el dispositivo durante la instalación.
- Si es posible, utilice cable blindado. Para evitar bucles de tierra, el blindaje debe conectarse a tierra solo en un extremo.
- Para evitar descargas eléctricas o daños al dispositivo, no aplique energía al dispositivo hasta que se haya completado todo el cableado.
- Las salidas digitales y las conexiones de alimentación están diseñadas para estar aisladas entre sí.
- Antes de poner en marcha el dispositivo, los parámetros deben configurarse de acuerdo con el uso deseado.
- Una configuración incompleta o incorrecta puede ser peligrosa.
- La unidad normalmente se suministra sin un interruptor de alimentación, fusible o disyuntor. Utilice un interruptor de alimentación, un fusible y un disyuntor según lo exijan las normativas locales.
- Aplique solo el voltaje nominal de la fuente de alimentación.tage a la unidad, para evitar daños al equipo.
- Si existe el peligro de un accidente grave como resultado de una falla o defecto en esta unidad, apague el sistema y desconecte el dispositivo del sistema.
- Nunca intente desarmar, modificar o reparar esta unidad. Tamptocar la unidad puede provocar un mal funcionamiento, una descarga eléctrica o un incendio.
- Comuníquese con nosotros si tiene alguna pregunta relacionada con la operación segura de esta unidad.
- Este equipo debe usarse de la manera especificada en este manual de instrucciones.
Conexiones
Fuente de alimentación
 |
Terminal |
| + | |
|
– |
Enlace de comunicación con dispositivo HMI
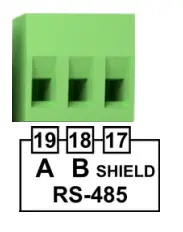 |
Terminal |
| A | |
| B | |
| Tierra |
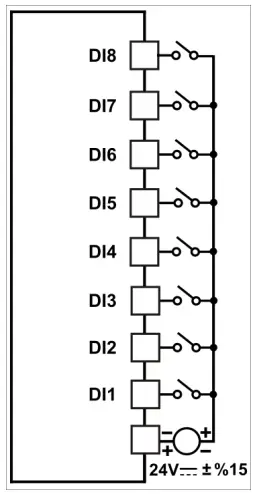
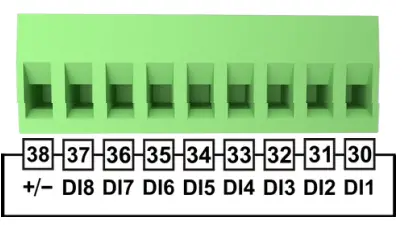
Entradas digitales
|
|
Terminal | Comentario | Esquema de conexión |
| DI8 |
Entradas digitales |
 |
|
| DI7 | |||
| DI6 | |||
| DI5 | |||
| DI4 | |||
| DI3 | |||
| DI2 | |||
| DI1 | |||
|
+/- |
PNP / PNP
Selección de Entradas Digitales |
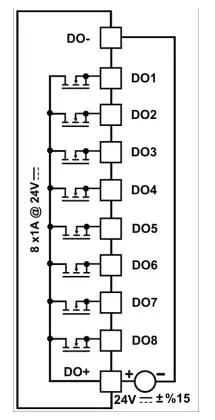
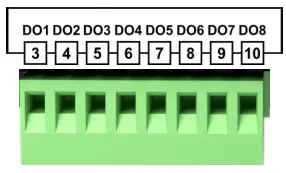
Salidas digitales
|
|
Terminal | Comentario | Esquema de conexión |
| DO1 |
Salidas digitales |
 |
|
| DO2 | |||
| DO3 | |||
| DO4 | |||
| DO5 | |||
| DO6 | |||
| DO7 | |||
| DO8 |
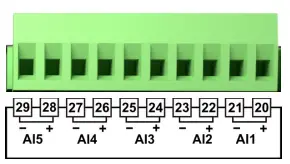
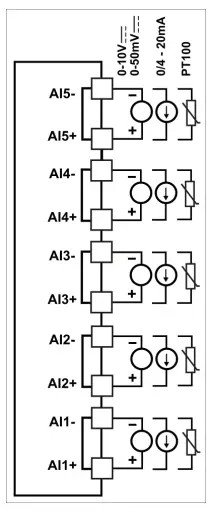
Entradas Analógicas
|
Terminal | Comentario | Esquema de conexión |
| AI5- |
Entrada analógica5 |
 |
|
| AI5 + | |||
| AI4- |
Entrada analógica4 |
||
| AI4 + | |||
| AI3- |
Entrada analógica3 |
||
| AI3 + | |||
| AI2- |
Entrada analógica2 |
||
| AI2 + | |||
| AI1- |
Entrada analógica1 |
||
| AI1 + |
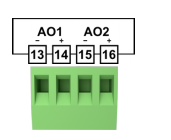
Salidas analógicas
|
|
Terminal | Comentario | Esquema de conexión |
|
AO + |
Suministro de salida analógica |
 |
|
|
AO- |
|||
|
AO1 |
Salidas analógicas |
||
|
AO2 |
Características técnicas
Fuente de alimentación
| Fuente de alimentación | : | 24 V CC |
| Rango permitido | : | 20.4 – 27.6 VCC |
| Consumo de energía | : | 3W |
Entradas digitales
| Entradas digitales | : | Entrada 8 | |
| Vol. De entrada nominaltage | : | 24 VCC | |
|
Vol de entradatage |
: |
Para lógica 0 | Para lógica 1 |
| < 5 VCC | >10 V CC | ||
| Corriente de entrada | : | 6mA max. | |
| Impedancia de entrada | : | 5.9 kΩ | |
| Tiempo de respuesta | : | '0' a '1' 50ms | |
| Aislamiento galvánico | : | 500 VCA durante 1 minuto | |
Entradas de contador de alta velocidad
| Entradas HSC | : | 2 entradas (HSC1: DI1 y DI2, HSC2: DI3 y DI4) | |
| Vol. De entrada nominaltage | : | 24 VCC | |
|
Vol de entradatage |
: |
Para lógica 0 | Para lógica 1 |
| < 10 VCC | >20 V CC | ||
| Corriente de entrada | : | 6mA max. | |
| Impedancia de entrada | : | 5.6 kΩ | |
| Rango de frecuencia | : | 15 KHz máx. para monofásico 10KHz máx. para doble fase | |
| Aislamiento galvánico | : | 500 VCA durante 1 minuto | |
Salidas digitales
| Salidas digitales | salida 8 | |
| Corriente de salida | : | 1 A máx. (Corriente total 8 A máx.) |
| Aislamiento galvánico | : | 500 VCA durante 1 minuto |
| Protección contra cortocircuitos | : | Sí |
Entradas Analógicas
| Entradas Analógicas | : | Entrada 5 | |||
|
Impedancia de entrada |
: |
PT-100 | 0/4-20 mA | 0-10 V | 0-50mV |
| -200oC-650oC | 100 Ω | >6.6kΩ | >10MΩ | ||
| Aislamiento galvánico | : | No | |||
| Resolución | : | 14 bits | |||
| Exactitud | : | ±0,25% | |||
| Samptiempo de ling | : | 250 ms | |||
| Indicación de estado | : | Sí | |||
Salidas analógicas
|
Salida analógica |
: |
salida 2 | |
| 0/4-20 mA | 0-10 V | ||
| Aislamiento galvánico | : | No | |
| Resolución | : | 12 bits | |
| Exactitud | : | 1% de la escala completa | |
Definiciones de direcciones internas
Configuración de comunicación:
| Parámetros | DIRECCIÓN | Opciones | Por defecto |
| ID | 40001 | 1–255 | 1 |
| BAUDIOS | 40002 | 0-1200/1-2400/2-4000/3-9600/4-19200/5-38400/
6-57600/7-115200 |
6 |
| PARAR BIT | 40003 | 0- 1 bit / 1- 2 bits | 0 |
| PARIDAD | 40004 | 0- Ninguno / 1- Par / 2- Impar | 0 |
Direcciones de dispositivos:
| Memoria | Formato | anaranjado | DIRECCIÓN | Tipo |
| Entrada digital | Estruendo | norte: 0 – 7 | 10001 – 10008 | Leer |
| Salida Digital | Don | norte: 0 – 7 | 1 – 8 | Lectura-escritura |
| Entrada Analógica | AEn | norte: 0 – 7 | 30004 – 30008 | Leer |
| Salida analógica | AEn | norte: 0 – 1 | 40010 – 40011 | Lectura-escritura |
| Versión* | (aaabbbbbbcccccccc)poco | número: 0 | 30001 | Leer |
- Nota:Los bits a en esta dirección son mayores, los bits b son el número de versión menor, los bits c indican el tipo de dispositivo.
- Exampen: Valor leído de 30001 (0x2121)hex = (0010000100100001)bit,
- a bits (001) bit = 1 (número de versión principal)
- b bits (00001) bit = 1 (número de versión menor)
- c bits (00100001) bit = 33 (Los tipos de dispositivo se indican en la tabla). Versión del dispositivo = V1.1
- Tipo de dispositivo = Entrada analógica de 0-10 V Salida analógica de 0-10 V
Tipos de dispositivos:
| Tipo de dispositivo | Valor |
| Entrada analógica PT100 Salida analógica de 4-20 mA | 0 |
| Entrada analógica PT100 Salida analógica 0-10V | 1 |
| Entrada analógica de 4-20 mA Salida analógica de 4-20 mA | 16 |
| Entrada analógica de 4-20 mA Salida analógica de 0-10 V | 17 |
| Entrada analógica de 0-10 V Salida analógica de 4-20 mA | 32 |
| Entrada analógica 0-10V Salida analógica 0-10V | 33 |
| Entrada analógica de 0-50 mV Salida analógica de 4-20 mA | 48 |
| Entrada analógica de 0-50 mV Salida analógica de 0-10 V | 49 |
La conversión de los valores leídos del módulo según el tipo de entrada analógica se describe en la siguiente tabla:
| Entrada Analógica | El rango de valores | Conversión Factor | Examparchivo de valor mostrado en PROOP |
|
PT-100 -200° – 650° |
-2000 – 6500 |
x10–1 |
Example-1: El valor leído como 100 se convierte a 10oC. |
| Example-2: El valor leído como 203 se convierte a 20.3oC. | |||
| 0 – 10 V | 0 – 20000 | 0.5×10–3 | Example-1: El valor leído como 2500 se convierte a 1.25 V. |
| 0 – 50mV | 0 – 20000 | 2.5×10–3 | Example-1: El valor leído como 3000 se convierte a 7.25 mV. |
|
0/4 – 20 mA |
0 – 20000 |
0.1×10–3 |
Example-1: El valor leído como 3500 se convierte a 7mA. |
| Example-2: El valor leído como 1000 se convierte a 1mA. |
La conversión de los valores escritos en el módulo según el tipo de salida analógica se describe en la siguiente tabla:
| Salida analógica | El rango de valores | Conversión Tasa | ExampArchivo de Valor Escrito en Módulos |
| 0 – 10 V | 0 – 10000 | x103 | Example-1: El valor a escribir como 1.25V se convierte a 1250. |
| 0/4 – 20 mA | 0 – 20000 | x103 | Example-1: El valor que se escribe como 1.25 mA se convierte a 1250. |
Direcciones específicas de entrada analógica:
| Parámetro | AI1 | AI2 | AI3 | AI4 | AI5 | Por defecto |
| Configuración Pedazos | 40123 | 40133 | 40143 | 40153 | 40163 | 0 |
| Valor de escala mínimo | 40124 | 40134 | 40144 | 40154 | 40164 | 0 |
| Valor máximo de escala | 40125 | 40135 | 40145 | 40155 | 40165 | 0 |
| Valor escalado | 30064 | 30070 | 30076 | 30082 | 30088 | – |
Bits de configuración de entrada analógica:
| AI1 | AI2 | AI3 | AI4 | AI5 | Descripción |
| 40123.0poco | 40133.0poco | 40143.0poco | 40153.0poco | 40163.0poco | 4-20mA/2-10V Seleccione:
0 = 0-20 mA/0-10 V 1 = 4-20 mA/2-10 V |
El valor escalado para las entradas analógicas se calcula según el estado del bit de configuración de selección de 4-20 mA / 2-10 V.
Direcciones específicas de salida analógica:
| Parámetro | AO1 | AO2 | Por defecto |
| Valor de escala mínimo para la entrada | 40173 | 40183 | 0 |
| Valor máximo de escala para la entrada | 40174 | 40184 | 20000 |
| Valor de escala mínimo para la salida | 40175 | 40185 | 0 |
| Valor máximo de escala para la salida | 40176 | 40186 | 10000/20000 |
| Función de salida analógica
0: uso manual 1: Usando los valores de escala anteriores, refleja la entrada a la salida. 2: Maneja la salida analógica como salida PID, utilizando los parámetros de escala mínima y máxima para la salida. |
40177 | 40187 | 0 |
- En caso de que el parámetro de la función de salida analógica esté configurado en 1 o 2;
- AI1 se utiliza como entrada para la salida A01.
- AI2 se utiliza como entrada para la salida A02.
- No: La duplicación de la función de entrada a salida (Función de salida analógica = 1) no se puede utilizar en módulos con entradas PT100.
Configuración de HSC (contador de alta velocidad)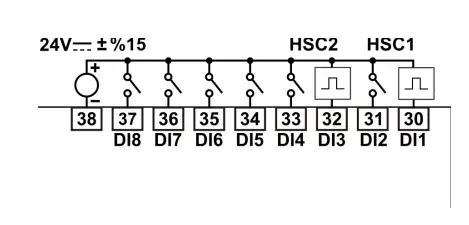
Conexión de contador monofásico
- Los contadores de alta velocidad cuentan eventos de alta velocidad que no se pueden controlar a velocidades de exploración PROOP-IO. La frecuencia de conteo máxima de un contador de alta velocidad es de 10 kHz para las entradas del codificador y de 15 kHz para las entradas del contador.
- Hay cinco tipos básicos de contadores: contador monofásico con control de dirección interno, contador monofásico con control de dirección externo, contador bifásico con 2 entradas de reloj, contador de cuadratura de fase A/B y tipo de medición de frecuencia.
- Nota que no todos los modos son compatibles con todos los contadores. Puede usar cada tipo excepto el tipo de medición de frecuencia: sin entradas de reinicio o inicio, con reinicio y sin inicio, o con entradas de inicio y reinicio.
- Cuando activa la entrada de reinicio, borra el valor actual y lo mantiene limpio hasta que desactive el reinicio.
- Cuando activa la entrada de inicio, permite que el contador cuente. Mientras el inicio está desactivado, el valor actual del contador se mantiene constante y los eventos de fichaje se ignoran.
- Si se activa el reinicio mientras el inicio está inactivo, el reinicio se ignora y el valor actual no cambia. Si la entrada de inicio se activa mientras la entrada de reinicio está activa, el valor actual se borra.
| Parámetros | DIRECCIÓN | Por defecto |
| Selección de modo ve de configuración HSC1* | 40012 | 0 |
| Selección de modo ve de configuración HSC2* | 40013 | 0 |
| HSC1 Nuevo valor actual (16 bytes menos significativos) | 40014 | 0 |
| Nuevo valor actual de HSC1 (16 bytes más significativos) | 40015 | 0 |
| HSC2 Nuevo valor actual (16 bytes menos significativos) | 40016 | 0 |
| Nuevo valor actual de HSC2 (16 bytes más significativos) | 40017 | 0 |
| Valor actual de HSC1 (16 bytes menos significativos) | 30010 | 0 |
| Valor actual de HSC1 (16 bytes más significativos) | 30011 | 0 |
| Valor actual de HSC2 (16 bytes menos significativos) | 30012 | 0 |
| Valor actual de HSC2 (16 bytes más significativos) | 30013 | 0 |
Nota: Este parámetro;
- El byte menos significativo es el parámetro Modo.
- El byte más significativo es el parámetro Configuración.
Descripción de la configuración del HSC:
| HSC1 | HSC2 | Descripción |
| 40012.8poco | 40013.8poco | Bit de control de nivel activo para Reset:
0 = El restablecimiento está activo en nivel bajo 1 = El restablecimiento está activo en nivel alto |
| 40012.9poco | 40013.9poco | Bit de control de nivel activo para Inicio:
0 = Inicio activo bajo 1 = Inicio activo alto |
| 40012.10poco | 40013.10poco | Bit de control de dirección de conteo:
0 = cuenta regresiva 1 = cuenta ascendente |
| 40012.11poco | 40013.11poco | Escriba el nuevo valor actual en el HSC:
0 = Sin actualizar 1 = Actualizar valor actual |
| 40012.12poco | 40013.12poco | Habilite el HSC:
0 = Deshabilitar el HSC 1 = Habilitar el HSC |
| 40012.13poco | 40013.13poco | Reservar |
| 40012.14poco | 40013.14poco | Reservar |
| 40012.15poco | 40013.15poco | Reservar |
Modos HSC:
| Modo | Descripción | Entradas | |||
| HSC1 | DI1 | DI2 | DI5 | DI6 | |
| HSC2 | DI3 | DI4 | DI7 | DI8 | |
| 0 | Contador Monofásico con Dirección Interna | Reloj | |||
| 1 | Reloj | Reiniciar | |||
| 2 | Reloj | Reiniciar | Comenzar | ||
| 3 | Contador Monofásico con Dirección Externa | Reloj | Dirección | ||
| 4 | Reloj | Dirección | Reiniciar | ||
| 5 | Reloj | Dirección | Reiniciar | Comenzar | |
| 6 | Contador de dos fases con 2 entradas de reloj | reloj arriba | Reloj abajo | ||
| 7 | reloj arriba | Reloj abajo | Reiniciar | ||
| 8 | reloj arriba | Reloj abajo | Reiniciar | Comenzar | |
| 9 | Contador de codificador de fase A/B | Reloj A | Reloj B | ||
| 10 | Reloj A | Reloj B | Reiniciar | ||
| 11 | Reloj A | Reloj B | Reiniciar | Comenzar | |
| 12 | Reservar | ||||
| 13 | Reservar | ||||
| 14 | Medida de período (con 10 μs samptiempo de espera) | Entrada de período | |||
| 15 | Encimera /
Período Ölçümü (1ms samptiempo de espera) |
máx. 15kHz | máx. 15kHz | máx. 1kHz | máx. 1kHz |
Direcciones específicas para el Modo 15:
| Parámetro | DI1 | DI2 | DI3 | DI4 | DI5 | DI6 | DI7 | DI8 | Por defecto |
| Configuración Pedazos | 40193 | 40201 | 40209 | 40217 | 40225 | 40233 | 40241 | 40249 | 2 |
| Tiempo de reinicio del período (1-1000 sn) |
40196 |
40204 |
40212 |
40220 |
40228 |
40236 |
40244 |
40252 |
60 |
| Contador de valor de 16 bits de bajo orden | 30094 | 30102 | 30110 | 30118 | 30126 | 30134 | 30142 | 30150 | – |
| Contador de valor de 16 bits de orden superior | 30095 | 30103 | 30111 | 30119 | 30127 | 30135 | 30143 | 30151 | – |
| Período valor de 16 bits de orden bajo (ms) | 30096 | 30104 | 30112 | 30120 | 30128 | 30136 | 30144 | 30152 | – |
| Valor de 16 bits de orden superior del período (ms) | 30097 | 30105 | 30113 | 30121 | 30129 | 30137 | 30145 | 30153 | – |
Configuración Pedazos:
| DI1 | DI2 | DI3 | DI4 | DI5 | DI6 | DI7 | DI8 | Descripción |
| 40193.0poco | 40201.0poco | 40209.0poco | 40217.0poco | 40225.0poco | 40233.0poco | 40241.0poco | 40249.0poco | Bit de habilitación DIx: 0 = DIx habilitada 1 = DIx deshabilitada |
|
40193.1poco |
40201.1poco |
40209.1poco |
40217.1poco |
40225.1poco |
40233.1poco |
40241.1poco |
40249.1poco |
Bit de dirección de conteo:
0 = cuenta regresiva 1 = cuenta ascendente |
| 40193.2poco | 40201.2poco | 40209.2poco | 40217.2poco | 40225.2poco | 40233.2poco | 40241.2poco | 40249.2poco | Reservar |
| 40193.3poco | 40201.3poco | 40209.3poco | 40217.3poco | 40225.3poco | 40233.3poco | 40241.3poco | 40249.3poco | Bit de reinicio de conteo DIx:
1 = Poner a cero el contador DIx |
Configuración de PID
La función de control PID o On/Off se puede utilizar configurando los parámetros determinados para cada entrada analógica en el módulo. La entrada analógica con función PID o ON/OFF activada controla la salida digital correspondiente. La salida digital asociada al canal cuya función PID o ON/OFF está activada no puede ser accionada manualmente.
- La entrada analógica AI1 controla la salida digital DO1.
- La entrada analógica AI2 controla la salida digital DO2.
- La entrada analógica AI3 controla la salida digital DO3.
- La entrada analógica AI4 controla la salida digital DO4.
- La entrada analógica AI5 controla la salida digital DO5.
Parámetros PID:
| Parámetro | Descripción |
| PID activo | Habilita la operación PID o ON/OFF.
0 = Uso manual 1 = PID activo 2 = ON/OFF activo |
| Establecer valor | Es el valor establecido para la operación PID o ON/OFF. Los valores de PT100 pueden estar entre -200.0 y 650.0 para entrada, 0 y 20000 para otros tipos. |
| Establecer compensación | Se utiliza como valor de ajuste de compensación en la operación PID. Puede tomar valores entre -325.0 y
325.0 para entrada PT100, -10000 a 10000 para otros tipos. |
| Establecer histéresis | Se utiliza como valor de histéresis de ajuste en la operación ON/OFF. Puede tomar valores entre
-325.0 y 325.0 para entrada PT100, -10000 a 10000 para otros tipos. |
| Valor de escala mínimo | La escala de trabajo es el valor límite inferior. Los valores de PT100 pueden estar entre -200.0 y
650.0 para entrada, 0 y 20000 para otros tipos. |
| Valor máximo de escala | La escala de trabajo es el valor límite superior. Los valores de PT100 pueden estar entre -200.0 y
650.0 para entrada, 0 y 20000 para otros tipos. |
| Valor proporcional de calefacción | Valor proporcional para calefacción. Puede tomar valores entre 0.0 y 100.0. |
| Valor integral de calefacción | Valor integral para calefacción. Puede tomar valores entre 0 y 3600 segundos. |
| Valor derivado de calefacción | Valor derivado para calefacción. Puede tomar valores entre 0.0 y 999.9. |
| Valor proporcional de enfriamiento | Valor proporcional para refrigeración. Puede tomar valores entre 0.0 y 100.0. |
| Valor Integral de Refrigeración | Valor integral para refrigeración. Puede tomar valores entre 0 y 3600 segundos. |
| Valor derivado de enfriamiento | Valor de la derivada para refrigeración. Puede tomar valores entre 0.0 y 999.9. |
| Período de salida | La salida es el período de control. Puede tomar valores entre 1 y 150 segundos. |
| Selección de calefacción/refrigeración | Especifica la operación del canal para PID o ON/OFF. 0 = Calefacción 1 = Refrigeración |
| Sintonización automática | Inicia la operación de sintonización automática para PID.
0 = Sintonización automática pasiva 1 = Sintonización automática activa |
- Nota: Para los valores en notación punteada, se utilizan 10 veces el valor real de estos parámetros en la comunicación Modbus.
Direcciones Modbus PID:
| Parámetro | AI1
DIRECCIÓN |
AI2
DIRECCIÓN |
AI3
DIRECCIÓN |
AI4
DIRECCIÓN |
AI5
DIRECCIÓN |
Por defecto |
| PID activo | 40023 | 40043 | 40063 | 40083 | 40103 | 0 |
| Establecer valor | 40024 | 40044 | 40064 | 40084 | 40104 | 0 |
| Establecer compensación | 40025 | 40045 | 40065 | 40085 | 40105 | 0 |
| Compensación del sensor | 40038 | 40058 | 40078 | 40098 | 40118 | 0 |
| Establecer histéresis | 40026 | 40046 | 40066 | 40086 | 40106 | 0 |
| Valor de escala mínimo | 40027 | 40047 | 40067 | 40087 | 40107 | 0/-200.0 |
| Valor máximo de escala | 40028 | 40048 | 40068 | 40088 | 40108 | 20000/650.0 |
| Valor proporcional de calefacción | 40029 | 40049 | 40069 | 40089 | 40109 | 10.0 |
| Valor integral de calefacción | 40030 | 40050 | 40070 | 40090 | 40110 | 100 |
| Valor derivado de calefacción | 40031 | 40051 | 40071 | 40091 | 40111 | 25.0 |
| Valor proporcional de enfriamiento | 40032 | 40052 | 40072 | 40092 | 40112 | 10.0 |
| Valor Integral de Refrigeración | 40033 | 40053 | 40073 | 40093 | 40113 | 100 |
| Valor derivado de enfriamiento | 40034 | 40054 | 40074 | 40094 | 40114 | 25.0 |
| Período de salida | 40035 | 40055 | 40075 | 40095 | 40115 | 1 |
| Selección de calefacción/refrigeración | 40036 | 40056 | 40076 | 40096 | 40116 | 0 |
| Sintonización automática | 40037 | 40057 | 40077 | 40097 | 40117 | 0 |
| Valor de salida instantánea PID (%) | 30024 | 30032 | 30040 | 30048 | 30056 | – |
| Bits de estado de PID | 30025 | 30033 | 30041 | 30049 | 30057 | – |
| Bits de configuración de PID | 40039 | 40059 | 40079 | 40099 | 40119 | 0 |
| Bits de estado de sintonización automática | 30026 | 30034 | 30042 | 30050 | 30058 | – |
Bits de configuración de PID:
| Dirección AI1 | Dirección AI2 | Dirección AI3 | Dirección AI4 | Dirección AI5 | Descripción |
| 40039.0poco | 40059.0poco | 40079.0poco | 40099.0poco | 40119.0poco | Pausa PID:
0 = la operación PID continúa. 1 = PID se detiene y la salida se apaga. |
Bits de estado de PID:
| Dirección AI1 | Dirección AI2 | Dirección AI3 | Dirección AI4 | Dirección AI5 | Descripción |
| 30025.0poco | 30033.0poco | 30041.0poco | 30049.0poco | 30057.0poco | Estado de cálculo de PID:
0 = Calculando PID 1 = No se calcula el PID. |
|
30025.1poco |
30033.1poco |
30041.1poco |
30049.1poco |
30057.1poco |
Estado de cálculo integral:
0 = Calculando la integral 1 = No se calcula la integral |
Bits de estado de autoajuste:
| Dirección AI1 | Dirección AI2 | Dirección AI3 | Dirección AI4 | Dirección AI5 | Descripción |
| 30026.0poco | 30034.0poco | 30042.0poco | 30050.0poco | 30058.0poco | Estado del primer paso de Auto Tune:
1 = El primer paso está activo. |
| 30026.1poco | 30034.1poco | 30042.1poco | 30050.1poco | 30058.1poco | Estado del segundo paso de Auto Tune:
1 = El segundo paso está activo. |
| 30026.2poco | 30034.2poco | 30042.2poco | 30050.2poco | 30058.2poco | Estado del tercer paso de Auto Tune:
1 = El tercer paso está activo. |
| 30026.3poco | 30034.3poco | 30042.3poco | 30050.3poco | 30058.3poco | Estado del paso final de Auto Tune:
1 = Sintonización automática completa. |
| 30026.4poco | 30034.4poco | 30042.4poco | 30050.4poco | 30058.4poco | Error de tiempo de espera de sintonización automática:
1 = Hay un tiempo de espera. |
Instalación de la configuración de comunicación por defecto
Para tarjetas con versión V01;
- Apague el dispositivo del módulo de E/S.
- Levante la cubierta del dispositivo.
- Cortocircuite los pines 2 y 4 en el zócalo que se muestra en la imagen.
- Espere al menos 2 segundos para energizar. Después de 2 segundos, la configuración de comunicación volverá a los valores predeterminados.
- Retire el cortocircuito.
- Cierre la cubierta del dispositivo.
Para tarjetas con versión V02;
- Apague el dispositivo del módulo de E/S.
- Levante la cubierta del dispositivo.
- Coloque un puente en el enchufe que se muestra en la imagen.
- Espere al menos 2 segundos para energizar. Después de 2 segundos, la configuración de comunicación volverá a los valores predeterminados.
- Retire el puente.
- Cierre la cubierta del dispositivo.
Selección de la dirección del esclavo Modbus
La dirección del esclavo se puede configurar de 1 a 255 en la dirección 40001 del modbus. Además, el interruptor Dip de la tarjeta se puede utilizar para configurar la dirección esclava en las tarjetas V02.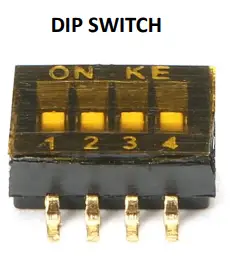
| DIP SWITCH | ||||
| ESCLAVO ID | 1 | 2 | 3 | 4 |
| Not1 | ON | ON | ON | ON |
| 1 | APAGADO | ON | ON | ON |
| 2 | ON | APAGADO | ON | ON |
| 3 | APAGADO | APAGADO | ON | ON |
| 4 | ON | ON | APAGADO | ON |
| 5 | APAGADO | ON | APAGADO | ON |
| 6 | ON | APAGADO | APAGADO | ON |
| 7 | APAGADO | APAGADO | APAGADO | ON |
| 8 | ON | ON | ON | APAGADO |
| 9 | APAGADO | ON | ON | APAGADO |
| 10 | ON | APAGADO | ON | APAGADO |
| 11 | APAGADO | APAGADO | ON | APAGADO |
| 12 | ON | ON | APAGADO | APAGADO |
| 13 | APAGADO | ON | APAGADO | APAGADO |
| 14 | ON | APAGADO | APAGADO | APAGADO |
| 15 | APAGADO | APAGADO | APAGADO | APAGADO |
- Nota 1: Cuando todos los interruptores DIP están en ON, el valor en el registro Modbus 40001 se usa como la dirección del esclavo.
Garantía
Este producto está garantizado contra defectos de materiales y mano de obra por un período de dos años a partir de la fecha de envío al Comprador. La Garantía se limita a la reparación o reemplazo de la unidad defectuosa a opción del fabricante. Esta garantía es nula si el producto ha sido alterado, mal usado, desmantelado o abusado de otra manera.
Mantenimiento
Las reparaciones solo deben ser realizadas por personal capacitado y especializado. Corte la alimentación del dispositivo antes de acceder a las piezas internas. No limpie la carcasa con disolventes a base de hidrocarburos (gasolina, tricloroetileno, etc.). El uso de estos disolventes puede reducir la fiabilidad mecánica del dispositivo.
Otra información
- Información del fabricante:
- Emko Elektronik Sanayi y Ticaret A.Ş.
- Bursa Organizar Sanayi Bölgesi, (Fethiye OSB Mah.)
- Ali Osman Sönmez Bulvarı, 2. Sokak, No:3 16215
- BURSA/TURQUÍA
- Teléfono : (224) 261 1900
- Fax: (224) 261 1912
- Información del servicio de reparación y mantenimiento:
- Emko Elektronik Sanayi y Ticaret A.Ş.
- Bursa Organizar Sanayi Bölgesi, (Fethiye OSB Mah.)
- Ali Osman Sönmez Bulvarı, 2. Sokak, No:3 16215
- BURSA/TURQUÍA
- Teléfono : (224) 261 1900
- Fax: (224) 261 1912
Documentos / Recursos
 |
Módulo de entrada o salida EMKO PROOP [pdf] Manual del usuario PROOP, módulo de entrada o salida, PROOP módulo de entrada o salida, módulo de entrada, módulo de salida, módulo |



