מודול קלט או פלט של EMKO PROOP

הַקדָמָה
מודול Proop-I/O משמש עם התקן Prop. זה יכול לשמש גם כנתיב נתונים עבור כל מותג. מסמך זה יעזור למשתמש להתקין ולחבר את מודול Proop-I/O.
- לפני תחילת ההתקנה של מוצר זה, אנא קרא את מדריך ההוראות.
- ייתכן שתוכן המסמך עודכן. אתה יכול לגשת לגרסה המעודכנת ביותר בכתובת www.emkoelektronik.com.tr
- סמל זה משמש לאזהרות בטיחות. על המשתמש לשים לב לאזהרות אלו.
תנאים סביבתיים
| טמפרטורת פעולה : | 0-50C |
| לחות מקסימלית: | 0-90 %RH (ללא עיבוי) |
| משקל: | 238 גרם |
| מימד: | 160 x 90 x 35 מ"מ |
תכונות
מודולי Proop-I/O מחולקים למספר סוגים לפי כניסות-יציאות. הסוגים הם כדלקמן.
| סוג מוצר
Proop-I/OP |
A |
. |
B |
. |
C |
. |
D |
. |
E |
. |
F |
| 2 | 2 | 1 | 3 | ||||||||
| אספקת מודול | |||||||||||
| 24 Vdc/Vac (בידוד) | 2 | |||
| תִקשׁוֹרֶת | ||||
| RS-485 (בידוד) | 2 | |||
| כניסות דיגיטליות | ||||
| 8x דיגיטלי | 1 | |||
| יציאות דיגיטליות | ||||
| טרנזיסטור 8x 1A (+V) | 3 | |||
| תשומות אנלוגיות | ||||
| 5x Pt-100 (-200…650°C)
5x 0/4..20mAdc 5x 0…10Vdc 5x 0…50mV |
1 | ||
| 2 | |||
| 3 | |||
| 4 | |||
| יציאות אנלוגיות | |||
| 2x 0/4…20mAdc
2x 0…10Vdc |
1 | ||
| 2 | |||
מידות
הרכבה של מודול על התקן Proop
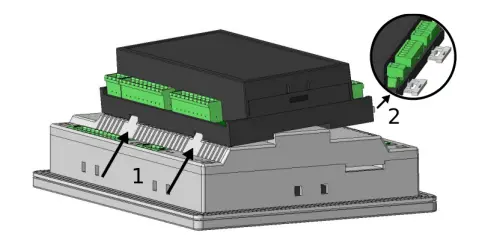 |
1- הכנס את מודול Prop I/O לתוך החורים של התקן Prop כמו בתמונה.
2- בדוק שחלקי הנעילה מחוברים להתקן Proop-I/O Module ונשלפים החוצה. |
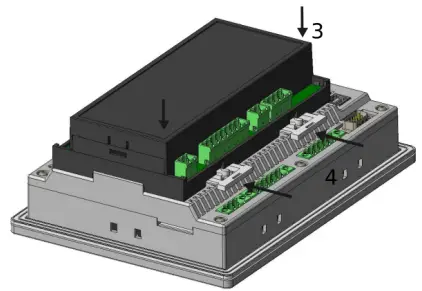 |
3- לחץ בחוזקה על התקן Proop-I/O Module בכיוון שצוין.
4- הכנס את חלקי הנעילה על ידי דחיפתם פנימה. |
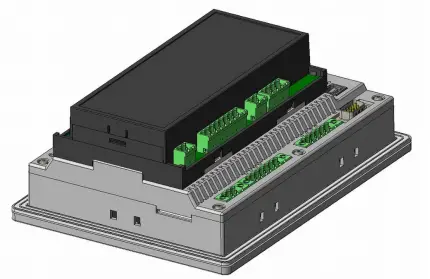 |
5- התמונה שהוכנסה של מכשיר המודול צריכה להיראות כמו זו משמאל. |
הרכבה של מודול על DIN-Ray
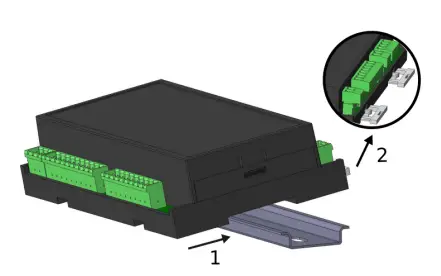 |
1- גרור את התקן Proop-I/O Module אל קרן ה-DIN כפי שמוצג.
2- בדוק שחלקי הנעילה מחוברים להתקן Prop-I/O Module ונשלפים החוצה. |
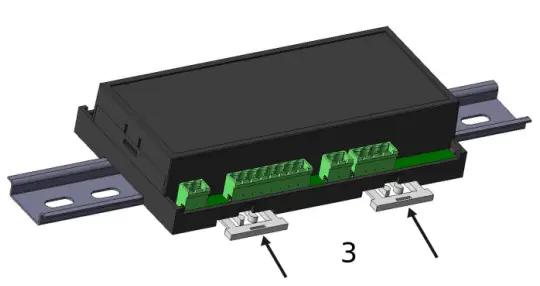 |
3- הכנס את חלקי הנעילה על ידי דחיפתם פנימה. |
 |
4- התמונה שהוכנסה של מכשיר המודול צריכה להיראות כמו זו שמשמאל. |
הַתקָנָה
- לפני תחילת ההתקנה של מוצר זה, אנא קרא בעיון את מדריך ההוראות ואת האזהרות שלהלן.
- מומלץ לבצע בדיקה ויזואלית של מוצר זה לאיתור נזק אפשרי שנגרם במהלך המשלוח לפני ההתקנה. באחריותך לוודא שטכנאי מכונות וחשמל מוסמכים יתקין מוצר זה.
- אין להשתמש ביחידה באטמוספרות גזים דליקות או נפיצות.
- אין לחשוף את המכשיר לקרני שמש ישירות או לכל מקור חום אחר.
- אין למקם את היחידה בסביבה של ציוד מגנטי כגון שנאים, מנועים או מכשירים המייצרים הפרעות (מכונות ריתוך וכו')
- כדי להפחית את ההשפעה של רעש חשמלי על המכשיר, Low voltagיש להפריד חיווט קו (במיוחד כבל כניסת חיישן) מזרם גבוה ונפחtagקו e.
- במהלך התקנת הציוד בפאנל, קצוות חדים בחלקי מתכת עלולים לגרום לחתכים בידיים, נא לנקוט משנה זהירות.
- הרכבה של המוצר חייבת להיעשות עם הרכבה משלוamps.
- אין להרכיב את המכשיר עם cl לא מתאיםampס. אל תפיל את המכשיר במהלך ההתקנה.
- אם אפשר, השתמש בכבל מסוכך. כדי למנוע לולאות הארקה, המגן צריך להיות מוארק בקצה אחד בלבד.
- כדי למנוע התחשמלות או נזק למכשיר, אל תפעיל חשמל למכשיר עד להשלמת כל החיווט.
- היציאות הדיגיטליות וחיבורי האספקה מתוכננים להיות מבודדים זה מזה.
- לפני הפעלת המכשיר, יש להגדיר פרמטרים בהתאם לשימוש הרצוי.
- תצורה לא מלאה או שגויה עלולה להיות מסוכנת.
- היחידה מסופקת בדרך כלל ללא מתג הפעלה, נתיך או מפסק. השתמש במתג הפעלה, נתיך ומפסק זרם כנדרש בתקנות המקומיות.
- החל רק את ספק הכוח המדורג כרךtage ליחידה, כדי למנוע נזק לציוד.
- אם קיימת סכנה לתאונה חמורה כתוצאה מכשל או פגם ביחידה זו, כבה את המערכת ונתק את המכשיר מהמערכת.
- לעולם אל תנסה לפרק, לשנות או לתקן יחידה זו. טampשימוש ביחידה עלול לגרום לתקלה, התחשמלות או שריפה.
- אנא פנה אלינו בכל שאלה הקשורה להפעלה בטוחה של יחידה זו.
- יש להשתמש בציוד זה באופן המצוין במדריך הוראות זה.
חיבורים
ספק כוח
 |
מָסוֹף |
| + | |
|
– |
קישור תקשורת עם התקן HMI
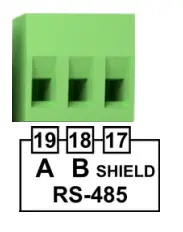 |
מָסוֹף |
| A | |
| B | |
| GND |
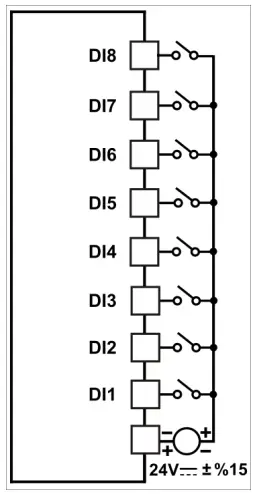
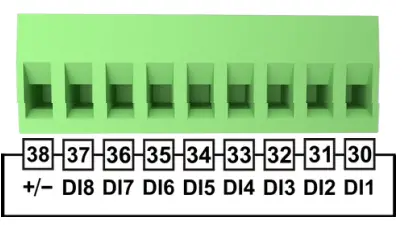
כניסות דיגיטליות
|
|
מָסוֹף | הֶעָרָה | חיבור שמה |
| DI8 |
כניסות דיגיטליות |
 |
|
| DI7 | |||
| DI6 | |||
| DI5 | |||
| DI4 | |||
| DI3 | |||
| DI2 | |||
| DI1 | |||
|
+/- |
NPN / PNP
מבחר כניסות דיגיטליות |
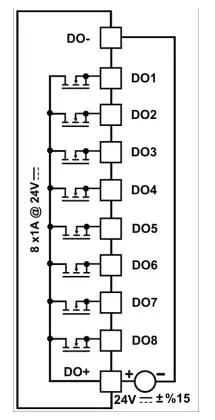
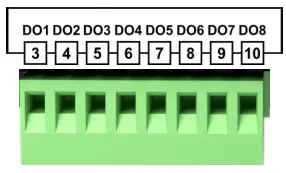
יציאות דיגיטליות
|
|
מָסוֹף | הֶעָרָה | תכנית חיבור |
| DO1 |
יציאות דיגיטליות |
 |
|
| DO2 | |||
| DO3 | |||
| DO4 | |||
| DO5 | |||
| DO6 | |||
| DO7 | |||
| DO8 |
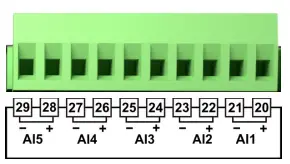
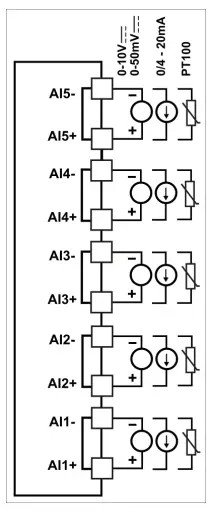
תשומות אנלוגיות
|
מָסוֹף | הֶעָרָה | תכנית חיבור |
| AI5- |
קלט אנלוגי 5 |
 |
|
| AI5+ | |||
| AI4- |
קלט אנלוגי 4 |
||
| AI4+ | |||
| AI3- |
קלט אנלוגי 3 |
||
| AI3+ | |||
| AI2- |
קלט אנלוגי 2 |
||
| AI2+ | |||
| AI1- |
קלט אנלוגי 1 |
||
| AI1+ |
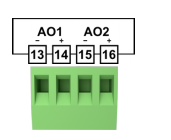
יציאות אנלוגיות
|
|
מָסוֹף | הֶעָרָה | תכנית חיבור |
|
AO+ |
אספקת פלט אנלוגי |
 |
|
|
AO- |
|||
|
AO1 |
יציאות אנלוגיות |
||
|
AO2 |
תכונות טכניות
ספק כוח
| ספק כוח | : | 24VDC |
| טווח מותר | : | 20.4 - 27.6 VDC |
| צריכת חשמל | : | 3W |
כניסות דיגיטליות
| כניסות דיגיטליות | : | 8 קלט | |
| קלט נומינלי כרךtage | : | 24 VDC | |
|
קלט כרךtage |
: |
עבור Logic 0 | עבור Logic 1 |
| < 5 VDC | > 10 VDC | ||
| זרם קלט | : | 6mA מקסימום | |
| עכבת קלט | : | 5.9 קילוואט | |
| זמן תגובה | : | '0' עד '1' 50 אלפיות השנייה | |
| בידוד גלווני | : | 500 VAC למשך דקה | |
כניסות מונה במהירות גבוהה
| כניסות HSC | : | 2 קלט (HSC1: DI1 ו-DI2, HSC2: DI3 ו-DI4) | |
| קלט נומינלי כרךtage | : | 24 VDC | |
|
קלט כרךtage |
: |
עבור Logic 0 | עבור Logic 1 |
| < 10 VDC | > 20 VDC | ||
| זרם קלט | : | 6mA מקסימום | |
| עכבת קלט | : | 5.6 קילוואט | |
| טווח תדרים | : | 15KHz מקסימום. עבור חד פאזי 10KHz מקסימום. לפאזה כפולה | |
| בידוד גלווני | : | 500 VAC למשך דקה | |
יציאות דיגיטליות
| יציאות דיגיטליות | פלט 8 | |
| פלטים זרם | : | 1 א' מקסימום (זרם כולל 8 A מקסימום) |
| בידוד גלווני | : | 500 VAC למשך דקה |
| הגנה מפני קצר חשמלי | : | כֵּן |
תשומות אנלוגיות
| תשומות אנלוגיות | : | 5 קלט | |||
|
עכבת קלט |
: |
PT-100 | 0/4-20mA | 0-10V | 0-50mV |
| -200oC-650oC | 100Ω | >6.6kΩ | >10MΩ | ||
| בידוד גלווני | : | לֹא | |||
| הַחְלָטָה | : | 14 ביטים | |||
| דִיוּק | : | ±0,25% | |||
| Sampזמן ling | : | 250 אלפיות השנייה | |||
| חיווי מצב | : | כֵּן | |||
יציאות אנלוגיות
|
פלט אנלוגי |
: |
פלט 2 | |
| 0/4-20mA | 0-10V | ||
| בידוד גלווני | : | לֹא | |
| הַחְלָטָה | : | 12 ביטים | |
| דִיוּק | : | 1% מהקנה המידה המלא | |
הגדרות כתובת פנימית
הגדרות תקשורת:
| פרמטרים | כְּתוֹבֶת | אפשרויות | בְּרִירַת מֶחדָל |
| ID | 40001 | 1–255 | 1 |
| קצב שידור | 40002 | 0- 1200 / 1- 2400 / 2- 4000 / 3- 9600 / 4- 19200 / 5- 38400 /
6- 57600 /7- 115200 |
6 |
| עצור ביט | 40003 | 0- 1Bit / 1- 2Bit | 0 |
| שִׁוּוּי | 40004 | 0- אין / 1- זוגי / 2- אי זוגי | 0 |
כתובות המכשיר:
| זֵכֶר | פוּרמָט | סידור | כְּתוֹבֶת | סוּג |
| קלט דיגיטלי | רַעַשׁ | n: 0 - 7 | 10001 - 10008 | לִקְרוֹא |
| פלט דיגיטלי | דוֹן | n: 0 - 7 | 1 - 8 | קריאה-כתוב |
| כניסה אנלוגית | AIn | n: 0 - 7 | 30004 - 30008 | לִקְרוֹא |
| פלט אנלוגי | אאון | n: 0 - 1 | 40010 - 40011 | קריאה-כתוב |
| גִרְסָה* | (aaabbbbbcccccccc)קצת | n: 0 | 30001 | לִקְרוֹא |
- פֶּתֶק:סיביות a בכתובת זו הם עיקריים, סיביות b הן מספר גרסה מינורי, סיביות c מציינות את סוג ההתקן.
- Exampעל: ערך שנקרא מ-30001 (0x2121)hex = (0010000100100001)bit ,
- a סיביות (001)bit = 1 (מספר גרסה מרכזי)
- b סיביות (00001)bit = 1 (מספר גרסה מינורי)
- c סיביות (00100001)bit = 33 (סוגי המכשירים מצוינים בטבלה.) גרסת התקן = V1.1
- סוג התקן = 0-10V קלט אנלוגי 0-10V יציאה אנלוגית
סוגי מכשירים:
| סוג מכשיר | עֵרֶך |
| קלט אנלוגי PT100 4-20mA פלט אנלוגי | 0 |
| PT100 קלט אנלוגי 0-10V פלט אנלוגי | 1 |
| 4-20mA קלט אנלוגי 4-20mA פלט אנלוגי | 16 |
| 4-20mA קלט אנלוגי 0-10V פלט אנלוגי | 17 |
| 0-10V קלט אנלוגי 4-20mA פלט אנלוגי | 32 |
| 0-10V קלט אנלוגי 0-10V יציאה אנלוגית | 33 |
| 0-50mV קלט אנלוגי 4-20mA פלט אנלוגי | 48 |
| 0-50mV קלט אנלוגי 0-10V יציאה אנלוגית | 49 |
ההמרה של הערכים הנקראים מהמודול לפי סוג הקלט האנלוגי מתוארת בטבלה הבאה:
| כניסה אנלוגית | טווח הערכים | הֲמָרָה גוֹרֵם | Example של הערך המוצג ב-PROOP |
|
PT-100 -200 מעלות – 650° |
-2000 - 6500 |
x10–1 |
Example-1: ערך הקריאה כ-100 מומר ל-10oC. |
| Example-2: ערך הקריאה כ-203 מומר ל-20.3oC. | |||
| 0 – 10V | 0 - 20000 | 0.5×10–3 | Example-1: ערך הקריאה כ-2500 מומר ל-1.25V. |
| 0 – 50mV | 0 - 20000 | 2.5×10–3 | Example-1: ערך הקריאה כ-3000 מומר ל-7.25mV. |
|
0/4 – 20mA |
0 - 20000 |
0.1×10–3 |
Example-1: ערך הקריאה כ-3500 מומר ל-7mA. |
| Example-2: ערך הקריאה כ-1000 מומר ל-1mA. |
ההמרה של הערכים לכתוב במודול לפי סוג הפלט האנלוגי מתוארת בטבלה הבאה:
| פלט אנלוגי | טווח הערכים | הֲמָרָה קֶצֶב | Example of Value כתוב במודולים |
| 0 – 10V | 0 - 10000 | x103 | Example-1: הערך שייכתב כ-1.25V מומר ל-1250. |
| 0/4 – 20mA | 0 - 20000 | x103 | Example-1: הערך שייכתב כ-1.25mA מומר ל-1250. |
כתובות ספציפיות לקלט אנלוגי:
| פָּרָמֶטֶר | AI1 | AI2 | AI3 | AI4 | AI5 | בְּרִירַת מֶחדָל |
| תְצוּרָה ביטים | 40123 | 40133 | 40143 | 40153 | 40163 | 0 |
| ערך קנה מידה מינימלי | 40124 | 40134 | 40144 | 40154 | 40164 | 0 |
| ערך סולם מקסימלי | 40125 | 40135 | 40145 | 40155 | 40165 | 0 |
| ערך מדורג | 30064 | 30070 | 30076 | 30082 | 30088 | – |
סיביות תצורה של קלט אנלוגי:
| AI1 | AI2 | AI3 | AI4 | AI5 | תֵאוּר |
| 40123.0קצת | 40133.0קצת | 40143.0קצת | 40153.0קצת | 40163.0קצת | 4-20mA/2-10V בחר:
0 = 0-20 mA/0-10 V 1 = 4-20 mA/2-10 V |
הערך המותאם עבור כניסות אנלוגיות מחושב בהתאם למצב של סיביות התצורה של 4-20mA / 2-10V.
כתובות ספציפיות ליציאה אנלוגית:
| פָּרָמֶטֶר | AO1 | AO2 | בְּרִירַת מֶחדָל |
| ערך סולם מינימלי לקלט | 40173 | 40183 | 0 |
| ערך סולם מקסימלי עבור קלט | 40174 | 40184 | 20000 |
| ערך סולם מינימלי עבור פלט | 40175 | 40185 | 0 |
| ערך סולם מקסימלי עבור פלט | 40176 | 40186 | 10000/20000 |
| פונקציית פלט אנלוגי
0: שימוש ידני 1: באמצעות ערכי הסולם שלמעלה, הוא משקף את הקלט לפלט. 2: הוא מניע את הפלט האנלוגי כפלט PID, תוך שימוש בפרמטרי קנה המידה המינימלי והמקסימלי עבור הפלט. |
40177 | 40187 | 0 |
- במקרה שפרמטר פונקציית היציאה האנלוגית מוגדר ל-1 או 2;
- AI1 משמש כקלט עבור פלט A01.
- AI2 משמש כקלט עבור פלט A02.
- לֹא: לא ניתן להשתמש בשיקוף תכונת הקלט לפלט (פונקציית פלט אנלוגי = 1) במודולים עם כניסות PT100.
הגדרות HSC(High-Speed Counter).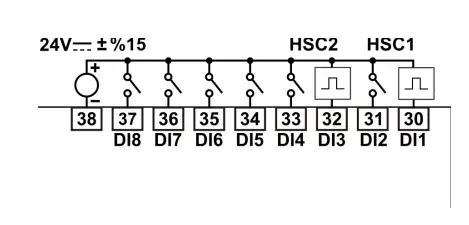
חיבור מונה חד פאזי
- מונים במהירות גבוהה סופרים אירועים במהירות גבוהה שלא ניתן לשלוט בהם בקצבי סריקת PROOP-IO. תדירות הספירה המקסימלית של מונה במהירות גבוהה היא 10kHz עבור כניסות מקודד ו-15kHz עבור כניסות מונה.
- ישנם חמישה סוגים בסיסיים של מונים: מונה חד-פאזי עם בקרת כיוון פנימית, מונה חד-פאזי עם בקרת כיוון חיצוני, מונה דו-פאזי עם 2 כניסות שעון, מונה ריבועי פאזה A/B וסוג מדידת תדר.
- פֶּתֶק שכל מצב אינו נתמך על ידי כל מונה. אתה יכול להשתמש בכל סוג מלבד סוג מדידת התדר: ללא כניסות איפוס או התחלה, עם איפוס וללא התחלה, או עם כניסות התחלה ואיפוס גם יחד.
- כאשר אתה מפעיל את קלט האיפוס, הוא מנקה את הערך הנוכחי ומחזיק אותו נקי עד שתבטל את הפעלת האיפוס.
- כאשר אתה מפעיל את קלט ההתחלה, הוא מאפשר למונה לספור. בזמן שההתחלה מושבתת, הערך הנוכחי של המונה נשמר קבוע ומתעלמים מאירועי שעון.
- אם האיפוס מופעל בזמן שההתחלה אינה פעילה, מתעלמים מהאיפוס והערך הנוכחי לא משתנה. אם קלט ההתחלה הופך לפעיל בזמן שכניסת האיפוס פעילה, הערך הנוכחי נמחק.
| פרמטרים | כְּתוֹבֶת | בְּרִירַת מֶחדָל |
| HSC1 Configuration ve Mode Select* | 40012 | 0 |
| HSC2 Configuration ve Mode Select* | 40013 | 0 |
| HSC1 ערך נוכחי חדש (פחות משמעותי 16 בתים) | 40014 | 0 |
| HSC1 ערך נוכחי חדש (המשמעותי ביותר 16 בתים) | 40015 | 0 |
| HSC2 ערך נוכחי חדש (פחות משמעותי 16 בתים) | 40016 | 0 |
| HSC2 ערך נוכחי חדש (המשמעותי ביותר 16 בתים) | 40017 | 0 |
| ערך נוכחי HSC1 (פחות משמעותי 16 בתים) | 30010 | 0 |
| ערך נוכחי HSC1 (המשמעותי ביותר 16 בתים) | 30011 | 0 |
| ערך נוכחי HSC2 (פחות משמעותי 16 בתים) | 30012 | 0 |
| ערך נוכחי HSC2 (המשמעותי ביותר 16 בתים) | 30013 | 0 |
פֶּתֶק: פרמטר זה;
- הבית הכי פחות משמעותי הוא הפרמטר Mode.
- הביט המשמעותי ביותר הוא פרמטר Configuration.
תיאור תצורת HSC:
| HSC1 | HSC2 | תֵאוּר |
| 40012.8קצת | 40013.8קצת | סיביות בקרת רמה פעילה עבור איפוס:
0 = איפוס פעיל נמוך 1 = איפוס פעיל גבוה |
| 40012.9קצת | 40013.9קצת | סיביות בקרת רמה פעילה עבור Start:
0 = ההתחלה פעילה נמוכה 1 = ההתחלה פעילה גבוהה |
| 40012.10קצת | 40013.10קצת | סיבית בקרת כיוון ספירה:
0 = ספירה לאחור 1 = ספירה למעלה |
| 40012.11קצת | 40013.11קצת | כתוב את הערך הנוכחי החדש ל-HSC:
0 = אין עדכון 1 = עדכון הערך הנוכחי |
| 40012.12קצת | 40013.12קצת | אפשר את HSC:
0 = השבת את ה-HSC 1 = הפעל את ה-HSC |
| 40012.13קצת | 40013.13קצת | לְהַזמִין |
| 40012.14קצת | 40013.14קצת | לְהַזמִין |
| 40012.15קצת | 40013.15קצת | לְהַזמִין |
מצבי HSC:
| מצב | תֵאוּר | תשומות | |||
| HSC1 | DI1 | DI2 | DI5 | DI6 | |
| HSC2 | DI3 | DI4 | DI7 | DI8 | |
| 0 | מונה חד פאזי עם כיוון פנימי | שָׁעוֹן | |||
| 1 | שָׁעוֹן | אִתחוּל | |||
| 2 | שָׁעוֹן | אִתחוּל | הַתחָלָה | ||
| 3 | מונה חד פאזי עם כיוון חיצוני | שָׁעוֹן | כיוון | ||
| 4 | שָׁעוֹן | כיוון | אִתחוּל | ||
| 5 | שָׁעוֹן | כיוון | אִתחוּל | הַתחָלָה | |
| 6 | מונה דו פאזי עם 2 כניסות שעון | השעון עד | שעון למטה | ||
| 7 | השעון עד | שעון למטה | אִתחוּל | ||
| 8 | השעון עד | שעון למטה | אִתחוּל | הַתחָלָה | |
| 9 | A/B Phase Encoder מונה | שעון א | שעון ב' | ||
| 10 | שעון א | שעון ב' | אִתחוּל | ||
| 11 | שעון א | שעון ב' | אִתחוּל | הַתחָלָה | |
| 12 | לְהַזמִין | ||||
| 13 | לְהַזמִין | ||||
| 14 | מדידת תקופה (עם 10 מיקרומטר שניותampזמן לינג) | קלט תקופה | |||
| 15 | מונה /
תקופה Ölçümü (1ms sampזמן לינג) |
מקסימום 15 קילו-הרץ | מקסימום 15 קילו-הרץ | מקסימום 1 קילו-הרץ | מקסימום 1 קילו-הרץ |
כתובות ספציפיות עבור מצב 15:
| פָּרָמֶטֶר | DI1 | DI2 | DI3 | DI4 | DI5 | DI6 | DI7 | DI8 | בְּרִירַת מֶחדָל |
| תְצוּרָה ביטים | 40193 | 40201 | 40209 | 40217 | 40225 | 40233 | 40241 | 40249 | 2 |
| זמן איפוס תקופה (1-1000 שניות) |
40196 |
40204 |
40212 |
40220 |
40228 |
40236 |
40244 |
40252 |
60 |
| מונה ערך נמוך של 16 סיביות | 30094 | 30102 | 30110 | 30118 | 30126 | 30134 | 30142 | 30150 | – |
| מונה ערך 16 סיביות מסדר גבוה | 30095 | 30103 | 30111 | 30119 | 30127 | 30135 | 30143 | 30151 | – |
| תקופה מסדר נמוך של 16 סיביות ערך (ms) | 30096 | 30104 | 30112 | 30120 | 30128 | 30136 | 30144 | 30152 | – |
| תקופה מסדר גבוה 16 סיביות ערך (ms) | 30097 | 30105 | 30113 | 30121 | 30129 | 30137 | 30145 | 30153 | – |
תְצוּרָה סיביות:
| DI1 | DI2 | DI3 | DI4 | DI5 | DI6 | DI7 | DI8 | תֵאוּר |
| 40193.0קצת | 40201.0קצת | 40209.0קצת | 40217.0קצת | 40225.0קצת | 40233.0קצת | 40241.0קצת | 40249.0קצת | סיביות הפעלה של DIx: 0 = DIx enable 1 = DIx disable |
|
40193.1קצת |
40201.1קצת |
40209.1קצת |
40217.1קצת |
40225.1קצת |
40233.1קצת |
40241.1קצת |
40249.1קצת |
סיבית כיוון ספירה:
0 = ספירה לאחור 1 = ספירה למעלה |
| 40193.2קצת | 40201.2קצת | 40209.2קצת | 40217.2קצת | 40225.2קצת | 40233.2קצת | 40241.2קצת | 40249.2קצת | לְהַזמִין |
| 40193.3קצת | 40201.3קצת | 40209.3קצת | 40217.3קצת | 40225.3קצת | 40233.3קצת | 40241.3קצת | 40249.3קצת | סיביות איפוס ספירת DIx:
1 = אפס את מונה ה-DIx |
הגדרות PID
ניתן להשתמש בתכונת הבקרה של PID או On/Off על ידי הגדרת הפרמטרים שנקבעו עבור כל כניסה אנלוגית במודול. הכניסה האנלוגית עם פונקציית PID או ON/OFF מופעלת שולטת ביציאה הדיגיטלית המתאימה. לא ניתן להניע את הפלט הדיגיטלי המשויך לערוץ שפונקציית ה-PID או ON/OFF שלו מופעלת באופן ידני.
- קלט אנלוגי AI1 שולט ביציאה הדיגיטלית DO1.
- קלט אנלוגי AI2 שולט ביציאה הדיגיטלית DO2.
- קלט אנלוגי AI3 שולט ביציאה הדיגיטלית DO3.
- קלט אנלוגי AI4 שולט ביציאה הדיגיטלית DO4.
- קלט אנלוגי AI5 שולט ביציאה הדיגיטלית DO5.
פרמטרים של PID:
| פָּרָמֶטֶר | תֵאוּר |
| PID פעיל | מאפשר פעולת PID או הפעלה/כיבוי.
0 = שימוש ידני 1 = PID פעיל 2 = ON/OFF פעיל |
| הגדר ערך | זהו הערך שנקבע עבור פעולת PID או ON/OFF. ערכי PT100 יכולים להיות בין -200.0 ל-650.0 עבור קלט, 0 ו-20000 עבור סוגים אחרים. |
| הגדר קיזוז | הוא משמש כערך קיזוז בפעולת PID. זה יכול לקחת ערכים בין -325.0 ל-
325.0 עבור קלט PT100, -10000 עד 10000 עבור סוגים אחרים. |
| הגדר היסטרזיס | הוא משמש כערך Hysteresis בפעולת ON/OFF. זה יכול לקחת ערכים ביניהם
-325.0 ו-325.0 עבור קלט PT100, -10000 עד 10000 עבור סוגים אחרים. |
| ערך קנה מידה מינימלי | סולם עבודה הוא ערך הגבול התחתון. ערכי PT100 יכולים להיות בין -200.0 ל-
650.0 לקלט, 0 ו-20000 לסוגים אחרים. |
| ערך סולם מקסימלי | סולם עבודה הוא ערך הגבול העליון. ערכי PT100 יכולים להיות בין -200.0 ל-
650.0 לקלט, 0 ו-20000 לסוגים אחרים. |
| ערך פרופורציונלי חימום | ערך יחסי לחימום. זה יכול לקחת ערכים בין 0.0 ל-100.0. |
| ערך אינטגרלי חימום | ערך אינטגרלי לחימום. זה יכול לקחת ערכים בין 0 ל-3600 שניות. |
| ערך נגזרת חימום | ערך נגזר לחימום. זה יכול לקחת ערכים בין 0.0 ל-999.9. |
| קירור ערך פרופורציונלי | ערך יחסי לקירור. זה יכול לקחת ערכים בין 0.0 ל-100.0. |
| ערך אינטגרלי של קירור | ערך אינטגרלי לקירור. זה יכול לקחת ערכים בין 0 ל-3600 שניות. |
| ערך נגזרת קירור | ערך נגזר לקירור. זה יכול לקחת ערכים בין 0.0 ל-999.9. |
| תקופת הפלט | הפלט הוא תקופת הבקרה. זה יכול לקחת ערכים בין 1 ל-150 שניות. |
| בחירת חימום/קירור | מציין את פעולת הערוץ עבור PID או ON/OFF. 0 = חימום 1 = קירור |
| כיוונון אוטומטי | מתחיל פעולת כוונון אוטומטי עבור PID.
0 = Auto Tune פסיבי 1 = Auto Tune פעיל |
- פֶּתֶק: עבור הערכים בסימון מנוקד, נעשה שימוש בתקשורת Modbus פי 10 מהערך האמיתי של פרמטרים אלה.
כתובות PID Modbus:
| פָּרָמֶטֶר | AI1
כְּתוֹבֶת |
AI2
כְּתוֹבֶת |
AI3
כְּתוֹבֶת |
AI4
כְּתוֹבֶת |
AI5
כְּתוֹבֶת |
בְּרִירַת מֶחדָל |
| PID פעיל | 40023 | 40043 | 40063 | 40083 | 40103 | 0 |
| הגדר ערך | 40024 | 40044 | 40064 | 40084 | 40104 | 0 |
| הגדר קיזוז | 40025 | 40045 | 40065 | 40085 | 40105 | 0 |
| היסט חיישן | 40038 | 40058 | 40078 | 40098 | 40118 | 0 |
| הגדר היסטרזיס | 40026 | 40046 | 40066 | 40086 | 40106 | 0 |
| ערך קנה מידה מינימלי | 40027 | 40047 | 40067 | 40087 | 40107 | 0/-200.0 |
| ערך סולם מקסימלי | 40028 | 40048 | 40068 | 40088 | 40108 | 20000/650.0 |
| ערך פרופורציונלי חימום | 40029 | 40049 | 40069 | 40089 | 40109 | 10.0 |
| ערך אינטגרלי חימום | 40030 | 40050 | 40070 | 40090 | 40110 | 100 |
| ערך נגזרת חימום | 40031 | 40051 | 40071 | 40091 | 40111 | 25.0 |
| קירור ערך פרופורציונלי | 40032 | 40052 | 40072 | 40092 | 40112 | 10.0 |
| ערך אינטגרלי של קירור | 40033 | 40053 | 40073 | 40093 | 40113 | 100 |
| ערך נגזרת קירור | 40034 | 40054 | 40074 | 40094 | 40114 | 25.0 |
| תקופת הפלט | 40035 | 40055 | 40075 | 40095 | 40115 | 1 |
| בחירת חימום/קירור | 40036 | 40056 | 40076 | 40096 | 40116 | 0 |
| כיוונון אוטומטי | 40037 | 40057 | 40077 | 40097 | 40117 | 0 |
| ערך פלט מיידי של PID (%) | 30024 | 30032 | 30040 | 30048 | 30056 | – |
| סיביות מצב PID | 30025 | 30033 | 30041 | 30049 | 30057 | – |
| סיביות תצורת PID | 40039 | 40059 | 40079 | 40099 | 40119 | 0 |
| סיביות סטטוס כוונון אוטומטי | 30026 | 30034 | 30042 | 30050 | 30058 | – |
סיביות תצורת PID:
| כתובת AI1 | כתובת AI2 | כתובת AI3 | כתובת AI4 | כתובת AI5 | תֵאוּר |
| 40039.0קצת | 40059.0קצת | 40079.0קצת | 40099.0קצת | 40119.0קצת | הפסקת PID:
0 = פעולת PID נמשכת. 1 = PID מופסק והפלט כבוי. |
סיביות סטטוס PID:
| כתובת AI1 | כתובת AI2 | כתובת AI3 | כתובת AI4 | כתובת AI5 | תֵאוּר |
| 30025.0קצת | 30033.0קצת | 30041.0קצת | 30049.0קצת | 30057.0קצת | מצב חישוב PID:
0 = חישוב PID 1 = PID אינו מחושב. |
|
30025.1קצת |
30033.1קצת |
30041.1קצת |
30049.1קצת |
30057.1קצת |
מצב חישוב אינטגרלי:
0 = אינטגרל חישוב 1 = אינטגרל אינו מחושב |
סיביות סטטוס כוונון אוטומטי:
| כתובת AI1 | כתובת AI2 | כתובת AI3 | כתובת AI4 | כתובת AI5 | תֵאוּר |
| 30026.0קצת | 30034.0קצת | 30042.0קצת | 30050.0קצת | 30058.0קצת | מצב כוונון אוטומטי של הצעד הראשון:
1 = השלב הראשון פעיל. |
| 30026.1קצת | 30034.1קצת | 30042.1קצת | 30050.1קצת | 30058.1קצת | סטטוס שלב שני של כוונון אוטומטי:
1 = השלב השני פעיל. |
| 30026.2קצת | 30034.2קצת | 30042.2קצת | 30050.2קצת | 30058.2קצת | סטטוס שלב שלישי כוונון אוטומטי:
1 = השלב השלישי פעיל. |
| 30026.3קצת | 30034.3קצת | 30042.3קצת | 30050.3קצת | 30058.3קצת | סטטוס שלב אחרון כוונון אוטומטי:
1 = הכוונון האוטומטי הושלם. |
| 30026.4קצת | 30034.4קצת | 30042.4קצת | 30050.4קצת | 30058.4קצת | שגיאת זמן קצוב כוונון אוטומטי:
1 = יש פסק זמן. |
התקנת הגדרות תקשורת כברירת מחדל
עבור כרטיסים עם גרסה V01;
- כבה את התקן מודול I/O.
- הרם את מכסה המכשיר.
- פינים קצרים 2 ו-4 בשקע המוצג בתמונה.
- המתן לפחות 2 שניות על ידי הפעלת אנרגיה. לאחר 2 שניות, הגדרות התקשורת יחזרו לברירת המחדל.
- הסר את הקצר.
- סגור את מכסה המכשיר.
עבור כרטיסים עם גרסה V02;
- כבה את התקן מודול I/O.
- הרם את מכסה המכשיר.
- שים מגשר על השקע המוצג בתמונה.
- המתן לפחות 2 שניות על ידי הפעלת אנרגיה. לאחר 2 שניות, הגדרות התקשורת יחזרו לברירת המחדל.
- הסר את המגשר.
- סגור את מכסה המכשיר.
בחירת כתובת עבדות של Modbus
ניתן להגדיר את כתובת העבד מ-1 עד 255 בכתובת 40001 של ה-modbus. בנוסף, ניתן להשתמש ב-Dip Switch בכרטיס כדי להגדיר את כתובת העבד בכרטיסי V02.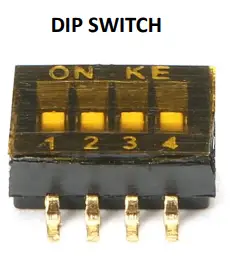
| מתג טבילה | ||||
| עבד ID | 1 | 2 | 3 | 4 |
| לא 1 | ON | ON | ON | ON |
| 1 | כבוי | ON | ON | ON |
| 2 | ON | כבוי | ON | ON |
| 3 | כבוי | כבוי | ON | ON |
| 4 | ON | ON | כבוי | ON |
| 5 | כבוי | ON | כבוי | ON |
| 6 | ON | כבוי | כבוי | ON |
| 7 | כבוי | כבוי | כבוי | ON |
| 8 | ON | ON | ON | כבוי |
| 9 | כבוי | ON | ON | כבוי |
| 10 | ON | כבוי | ON | כבוי |
| 11 | כבוי | כבוי | ON | כבוי |
| 12 | ON | ON | כבוי | כבוי |
| 13 | כבוי | ON | כבוי | כבוי |
| 14 | ON | כבוי | כבוי | כבוי |
| 15 | כבוי | כבוי | כבוי | כבוי |
- הערה 1: כאשר כל מתגי ה-Dip מופעלים, הערך ב-Modbus register 40001 משמש ככתובת העבד.
אַחֲרָיוּת
למוצר זה יש אחריות מפני פגמים בחומרים ובעבודה לתקופה של שנתיים מתאריך המשלוח לקונה. האחריות מוגבלת לתיקון או החלפה של היחידה הפגומה לפי בחירת היצרן. אחריות זו בטלה אם המוצר שונה, נעשה בו שימוש לרעה, פורק או נעשה שימוש לרעה בדרך אחרת.
תַחזוּקָה
תיקונים צריכים להתבצע רק על ידי צוות מיומן ומתמחה. נתק את החשמל למכשיר לפני גישה לחלקים פנימיים. אין לנקות את המארז עם ממיסים על בסיס פחמימנים (בנזין, טריכלוראתילן וכו'). שימוש בממסים אלה יכול להפחית את האמינות המכנית של המכשיר.
מידע אחר
- מידע יצרן:
- Emko Elektronik Sanayi ve Ticaret A.Ş.
- Bursa Organize Sanayi Bölgesi, (Fethiye OSB Mah.)
- Ali Osman Sönmez Bulvarı, 2. Sokak, No:3 16215
- BURSA/טורקיה
- טלפון: (224) 261 1900
- פקס: (224) 261 1912
- מידע על שירות תיקון ותחזוקה:
- Emko Elektronik Sanayi ve Ticaret A.Ş.
- Bursa Organize Sanayi Bölgesi, (Fethiye OSB Mah.)
- Ali Osman Sönmez Bulvarı, 2. Sokak, No:3 16215
- BURSA/טורקיה
- טלפון: (224) 261 1900
- פקס: (224) 261 1912
מסמכים / משאבים
 |
מודול קלט או פלט של EMKO PROOP [pdfמדריך למשתמש PROOP, מודול קלט או פלט, מודול קלט או פלט PROOP, מודול קלט, מודול פלט, מודול |



