Módulo de entrada ou saída EMKO PROOP

Prefácio
O módulo Proop-I/O é usado com o dispositivo Prop. Também pode ser usado como um caminho de dados para qualquer marca. Este documento será útil para o usuário instalar e conectar o Módulo Proop-I/O.
- Antes de iniciar a instalação deste produto, leia o manual de instruções.
- O conteúdo do documento pode ter sido atualizado. Você pode acessar a versão mais atualizada em www.emkoelektronik.com.tr
- Este símbolo é usado para avisos de segurança. O usuário deve prestar atenção a esses avisos.
Condições ambientais
| Temperatura de operação : | 0-50C |
| Umidade Máxima: | 0-90% RH (sem condensação) |
| Peso : | 238gr |
| Dimensão: | 160 x 90 x 35 mm |
Características
Os módulos Proop-I/O são divididos em vários tipos de acordo com as entradas-saídas. Os tipos são os seguintes.
| Tipo de produto
Proop-I/OP |
A |
. |
B |
. |
C |
. |
D |
. |
E |
. |
F |
| 2 | 2 | 1 | 3 | ||||||||
| Fornecimento de módulo | |||||||||||
| 24 Vcc/Vca (isolamento) | 2 | |||
| Comunicação | ||||
| RS-485 (isolamento) | 2 | |||
| Entradas Digitais | ||||
| 8x Digital | 1 | |||
| Saídas Digitais | ||||
| Transistor 8x 1A (+V) | 3 | |||
| Entradas analógicas | ||||
| 5x Pt-100 (-200…650°C)
5x 0/4..20mAdc 5x 0…10Vdc 5x 0…50mV |
1 | ||
| 2 | |||
| 3 | |||
| 4 | |||
| Saídas Analógicas | |||
| 2x 0/4…20mAcc
2x 0…10Vcc |
1 | ||
| 2 | |||
Dimensões
Montagem do Módulo no Dispositivo Proop
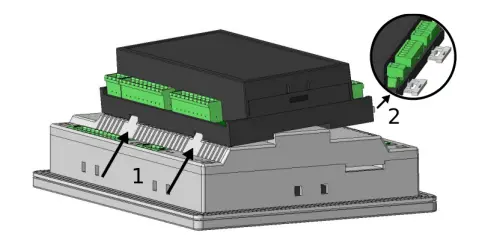 |
1- Insira o Módulo Prop I/O nos orifícios do dispositivo Prop como na figura.
2- Verifique se as peças de travamento estão conectadas ao dispositivo Proop-I/O Module e puxadas para fora. |
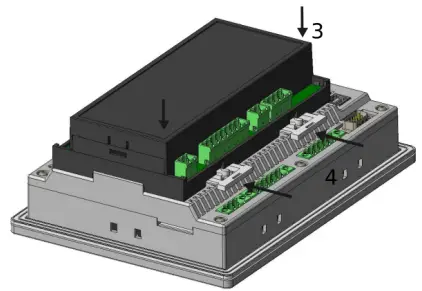 |
3- Pressione o dispositivo Proop-I/O Module firmemente na direção especificada.
4- Insira as peças de bloqueio empurrando-as para dentro. |
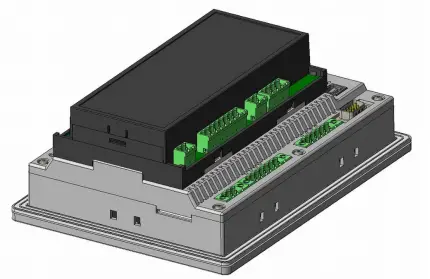 |
5- A imagem inserida do dispositivo do módulo deve se parecer com a da esquerda. |
Montagem do Módulo em Raio DIN
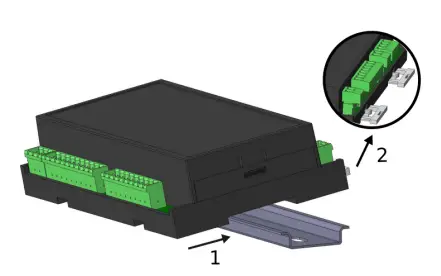 |
1- Arraste o dispositivo Proop-I/O Module para o raio DIN, conforme mostrado.
2- Verifique se as peças de travamento estão conectadas ao dispositivo Prop-I/O Module e puxadas para fora. |
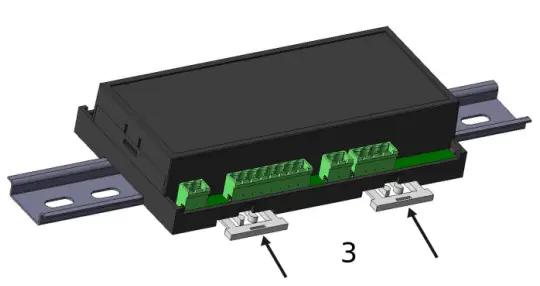 |
3- Insira as peças de bloqueio empurrando-as para dentro. |
 |
4- A imagem inserida do dispositivo do módulo deve se parecer com a da esquerda. |
Instalação
- Antes de iniciar a instalação deste produto, leia atentamente o manual de instruções e os avisos abaixo.
- Uma inspeção visual deste produto para possíveis danos ocorridos durante o transporte é recomendada antes da instalação. É sua responsabilidade garantir que técnicos mecânicos e elétricos qualificados instalem este produto.
- Não use a unidade em atmosferas gasosas combustíveis ou explosivas.
- Não exponha a unidade aos raios solares diretos ou a qualquer outra fonte de calor.
- Não coloque a unidade na proximidade de equipamentos magnéticos como transformadores, motores ou dispositivos que gerem interferência (máquinas de soldar, etc.)
- Para reduzir o efeito do ruído elétrico no dispositivo, baixo volumetagA fiação da linha (especialmente o cabo de entrada do sensor) deve ser separada de alta corrente e vol.tage linha.
- Durante a instalação do equipamento no painel, bordas afiadas em peças metálicas podem causar cortes nas mãos, tenha cuidado.
- A montagem do produto deve ser feita com montagem própria clamps.
- Não monte o dispositivo com cl inadequadoamps. Não deixe cair o dispositivo durante a instalação.
- Se possível, use cabo blindado. Para evitar loops de aterramento, a blindagem deve ser aterrada apenas em uma extremidade.
- Para evitar choque elétrico ou danos ao dispositivo, não ligue o dispositivo até que toda a fiação esteja concluída.
- As saídas digitais e conexões de alimentação são projetadas para serem isoladas umas das outras.
- Antes do comissionamento do dispositivo, os parâmetros devem ser ajustados de acordo com o uso desejado.
- A configuração incompleta ou incorreta pode ser perigosa.
- A unidade é normalmente fornecida sem um interruptor, fusível ou disjuntor. Use um interruptor, fusível e disjuntor conforme exigido pelos regulamentos locais.
- Aplique apenas o vol da fonte de alimentação nominaltage à unidade, para evitar danos ao equipamento.
- Se houver perigo de acidente grave resultante de uma falha ou defeito nesta unidade, desligue o sistema e desconecte o dispositivo do sistema.
- Nunca tente desmontar, modificar ou reparar esta unidade. TampTrabalhar com a unidade pode resultar em mau funcionamento, choque elétrico ou incêndio.
- Entre em contato conosco se tiver qualquer dúvida relacionada à operação segura desta unidade.
- Este equipamento deve ser utilizado da forma especificada neste manual de instruções.
Conexões
Fonte de energia
 |
terminal |
| + | |
|
– |
Link de comunicação com o dispositivo IHM
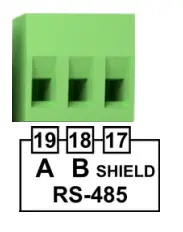 |
terminal |
| A | |
| B | |
| Terra |
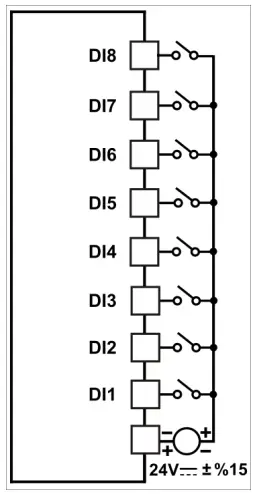
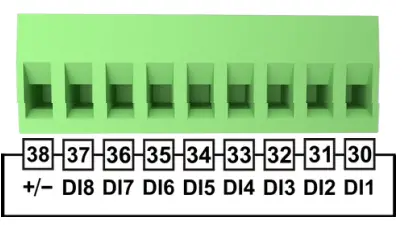
Entradas Digitais
|
|
terminal | Comentário | Esquema de Conexão |
| DI8 |
Entradas Digitais |
 |
|
| DI7 | |||
| DI6 | |||
| DI5 | |||
| DI4 | |||
| DI3 | |||
| DI2 | |||
| DI1 | |||
|
+/- |
NPN/PNP
Seleção de Entradas Digitais |
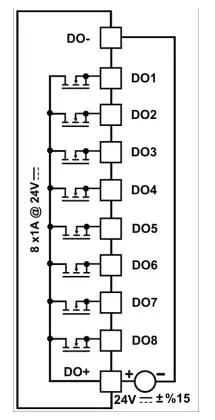
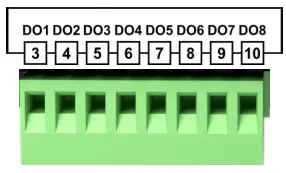
Saídas Digitais
|
|
terminal | Comentário | Esquema de Conexão |
| DO1 |
Saídas Digitais |
 |
|
| DO2 | |||
| DO3 | |||
| DO4 | |||
| DO5 | |||
| DO6 | |||
| DO7 | |||
| DO8 |
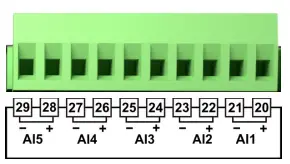
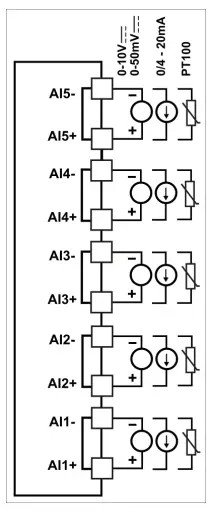
Entradas analógicas
|
terminal | Comentário | Esquema de Conexão |
| AI5- |
Entrada Analógica5 |
 |
|
| AI5 + | |||
| AI4- |
Entrada Analógica4 |
||
| AI4 + | |||
| AI3- |
Entrada Analógica3 |
||
| AI3 + | |||
| AI2- |
Entrada Analógica2 |
||
| AI2 + | |||
| AI1- |
Entrada Analógica1 |
||
| AI1 + |
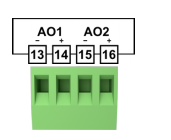
Saídas Analógicas
|
|
terminal | Comentário | Esquema de Conexão |
|
AO + |
Fornecimento de Saída Analógica |
 |
|
|
AO- |
|||
|
AO1 |
Saídas Analógicas |
||
|
AO2 |
Características técnicas
Fonte de energia
| Fonte de energia | : | 24 VCC |
| Faixa permitida | : | 20.4 – 27.6 VCC |
| Consumo de energia | : | 3W |
Entradas Digitais
| Entradas Digitais | : | Entrada 8 | |
| Vol de entrada nominaltage | : | 24 VCC | |
|
Vol de entradatage |
: |
Para Lógica 0 | Para Lógica 1 |
| < 5 VCC | >10 VCC | ||
| Corrente de entrada | : | 6mA máx. | |
| Impedância de entrada | : | 5.9 kΩ | |
| Tempo de resposta | : | '0' a '1' 50ms | |
| Isolamento galvânico | : | 500 VCA por 1 minuto | |
Entradas do contador de alta velocidade
| Entradas HSC | : | 2 Entradas (HSC1: DI1 e DI2, HSC2: DI3 e DI4) | |
| Vol de entrada nominaltage | : | 24 VCC | |
|
Vol de entradatage |
: |
Para Lógica 0 | Para Lógica 1 |
| < 10 VCC | >20 VCC | ||
| Corrente de entrada | : | 6mA máx. | |
| Impedância de entrada | : | 5.6 kΩ | |
| Faixa de frequência | : | 15KHz máx. para monofásico 10KHz máx. para fase dupla | |
| Isolamento galvânico | : | 500 VCA por 1 minuto | |
Saídas Digitais
| Saídas Digitais | saída 8 | |
| Saídas atuais | : | 1A máx. (Corrente total 8 A máx.) |
| Isolamento galvânico | : | 500 VCA por 1 minuto |
| Proteção contra curto-circuito | : | Sim |
Entradas analógicas
| Entradas analógicas | : | Entrada 5 | |||
|
Impedância de entrada |
: |
PT-100 | 0/4-20mA | 0-10V | 0-50mV |
| -200oC-650oC | 100Ω | >6.6kΩ | >10MΩ | ||
| Isolamento galvânico | : | Não | |||
| Resolução | : | 14 bits | |||
| Precisão | : | ±0,25% | |||
| Samptempo de espera | : | 250ms | |||
| Indicação de status | : | Sim | |||
Saídas Analógicas
|
Saída analógica |
: |
saída 2 | |
| 0/4-20mA | 0-10V | ||
| Isolamento galvânico | : | Não | |
| Resolução | : | 12 bits | |
| Precisão | : | 1% da escala completa | |
Definições de endereço interno
Configurações de comunicação:
| Parâmetros | Endereço | Opções | Padrão |
| ID | 40001 | 1–255 | 1 |
| TAXA DE TRANSMISSÃO | 40002 | 0- 1200 / 1- 2400 / 2- 4000 / 3- 9600 / 4- 19200 / 5- 38400 /
6-57600/7-115200 |
6 |
| PONTO DE PARADA | 40003 | 0-1Bit / 1-2Bit | 0 |
| PARIDADE | 40004 | 0- Nenhum / 1- Par / 2- Ímpar | 0 |
Endereços do dispositivo:
| Memória | Formatar | laranja | Endereço | Tipo |
| Entrada digital | DIn | número: 0 – 7 | 10001 – 10008 | Ler |
| Saída Digital | Vestir | número: 0 – 7 | 1 – 8 | Leitura-Escrita |
| Entrada analógica | Em | número: 0 – 7 | 30004 – 30008 | Ler |
| Saída analógica | AEm | número: 0 – 1 | 40010 – 40011 | Leitura-Escrita |
| Versão* | (aaabbbbcccccccc)pedaço | n: 0 | 30001 | Ler |
- Observação:Os bits a neste endereço são principais, os bits b são o número da versão secundária, os bits c indicam o tipo de dispositivo.
- Exampem: Valor lido de 30001 (0x2121) hex = (0010000100100001) bit ,
- a bits (001)bit = 1 (número da versão principal)
- b bits (00001) bit = 1 (número da versão secundária)
- c bits (00100001)bit = 33 (Os tipos de dispositivos são indicados na tabela.) Versão do dispositivo = V1.1
- Tipo de dispositivo = 0-10V Entrada Analógica 0-10V Saída Analógica
Tipos de dispositivos:
| Tipo de dispositivo | Valor |
| PT100 Entrada Analógica 4-20mA Saída Analógica | 0 |
| PT100 Entrada Analógica 0-10V Saída Analógica | 1 |
| Entrada Analógica 4-20mA Saída Analógica 4-20mA | 16 |
| Entrada Analógica 4-20mA Saída Analógica 0-10V | 17 |
| Entrada Analógica 0-10V Saída Analógica 4-20mA | 32 |
| Entrada Analógica 0-10V Saída Analógica 0-10V | 33 |
| Entrada Analógica 0-50mV Saída Analógica 4-20mA | 48 |
| Entrada Analógica 0-50mV Saída Analógica 0-10V | 49 |
A conversão dos valores lidos do módulo de acordo com o tipo de entrada analógica está descrita na tabela a seguir:
| Entrada analógica | A faixa de valor | Conversão Fator | Example de valor mostrado em PROOP |
|
PT-100 -200° – 650° |
-2000 – 6500 |
x10–1 |
Example-1: O valor lido como 100 é convertido em 10oC. |
| Example-2: O valor lido como 203 é convertido em 20.3oC. | |||
| 0 – 10V | 0 – 20000 | 0.5×10–3 | Example-1: O valor lido como 2500 é convertido para 1.25V. |
| 0 – 50mV | 0 – 20000 | 2.5×10–3 | Example-1: O valor lido como 3000 é convertido para 7.25mV. |
|
0/4 – 20mA |
0 – 20000 |
0.1×10–3 |
Example-1: O valor lido como 3500 é convertido para 7mA. |
| Example-2: O valor lido como 1000 é convertido para 1mA. |
A conversão dos valores escritos no módulo de acordo com o tipo de saída analógica está descrita na tabela a seguir:
| Saída analógica | A faixa de valor | Conversão Avaliar | Examparquivo de valor escrito em módulos |
| 0 – 10V | 0 – 10000 | x103 | Example-1: O valor a ser escrito como 1.25V é convertido para 1250. |
| 0/4 – 20mA | 0 – 20000 | x103 | Example-1: O valor a ser escrito como 1.25mA é convertido para 1250. |
Endereços específicos de entrada analógica:
| Parâmetro | AI1 | AI2 | AI3 | AI4 | AI5 | Padrão |
| Configuração Pedaços | 40123 | 40133 | 40143 | 40153 | 40163 | 0 |
| Valor Mínimo da Escala | 40124 | 40134 | 40144 | 40154 | 40164 | 0 |
| Valor Máximo da Escala | 40125 | 40135 | 40145 | 40155 | 40165 | 0 |
| Valor Escalado | 30064 | 30070 | 30076 | 30082 | 30088 | – |
Bits de configuração de entrada analógica:
| AI1 | AI2 | AI3 | AI4 | AI5 | Descrição |
| 40123.0pedaço | 40133.0pedaço | 40143.0pedaço | 40153.0pedaço | 40163.0pedaço | 4-20mA/2-10V Selecione:
0 = 0-20 mA/0-10 V 1 = 4-20 mA/2-10 V |
O Valor Escalado para entradas analógicas é calculado de acordo com o estado do bit de configuração Seleção 4-20mA / 2-10V.
Endereços específicos de saída analógica:
| Parâmetro | AO1 | AO2 | Padrão |
| Valor Mínimo de Escala para Entrada | 40173 | 40183 | 0 |
| Valor Máximo de Escala para Entrada | 40174 | 40184 | 20000 |
| Valor mínimo de escala para saída | 40175 | 40185 | 0 |
| Valor Máximo de Escala para Saída | 40176 | 40186 | 10000/20000 |
| Função de Saída Analógica
0: uso manual 1: Usando os valores de escala acima, reflete a entrada na saída. 2: Conduz a saída analógica como saída PID, utilizando os parâmetros de escala mínimo e máximo para a saída. |
40177 | 40187 | 0 |
- Caso o parâmetro da função de saída analógica seja definido como 1 ou 2;
- AI1 é usado como entrada para a saída A01.
- AI2 é usado como entrada para a saída A02.
- Não: O espelhamento do recurso de entrada para saída (função de saída analógica = 1) não pode ser usado em módulos com entradas PT100.
Configurações de HSC (contador de alta velocidade)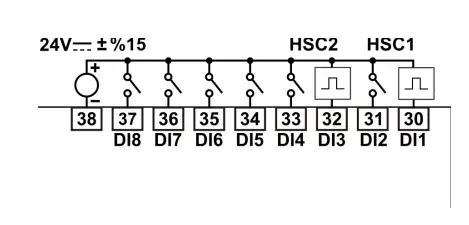
Conexão do contador monofásico
- Os contadores de alta velocidade contam eventos de alta velocidade que não podem ser controlados nas taxas de varredura do PROOP-IO. A frequência máxima de contagem de um contador de alta velocidade é de 10 kHz para entradas de codificador e 15 kHz para entradas de contador.
- Existem cinco tipos básicos de contadores: contador monofásico com controle de direção interno, contador monofásico com controle de direção externo, contador bifásico com 2 entradas de clock, contador de quadratura de fase A/B e tipo de medição de frequência.
- Observação que nem todos os modos são suportados por todos os contadores. Você pode usar cada tipo, exceto o tipo de medição de frequência: sem reinicialização ou entradas de início, com reinicialização e sem inicialização ou com entradas de reinicialização e reinicialização.
- Quando você ativa a entrada de reinicialização, ela limpa o valor atual e o mantém limpo até que você desative a reinicialização.
- Quando você ativa a entrada de início, ela permite que o contador conte. Enquanto o início está desativado, o valor atual do contador é mantido constante e os eventos de clock são ignorados.
- Se o reset for ativado enquanto o start estiver inativo, o reset é ignorado e o valor atual não é alterado. Se a entrada de início se tornar ativa enquanto a entrada de reinicialização estiver ativa, o valor atual será zerado.
| Parâmetros | Endereço | Padrão |
| Configuração HSC1 e Seleção de Modo* | 40012 | 0 |
| Configuração HSC2 e Seleção de Modo* | 40013 | 0 |
| HSC1 Novo valor atual (menos significativo 16 bytes) | 40014 | 0 |
| HSC1 Novo valor atual (16 bytes mais significativos) | 40015 | 0 |
| HSC2 Novo valor atual (menos significativo 16 bytes) | 40016 | 0 |
| HSC2 Novo valor atual (16 bytes mais significativos) | 40017 | 0 |
| Valor atual HSC1 (menos significativo 16 bytes) | 30010 | 0 |
| Valor atual HSC1 (16 bytes mais significativos) | 30011 | 0 |
| Valor atual HSC2 (menos significativo 16 bytes) | 30012 | 0 |
| Valor atual HSC2 (16 bytes mais significativos) | 30013 | 0 |
Observação: Este parâmetro;
- O byte menos significativo é o parâmetro Mode.
- O byte mais significativo é o parâmetro de configuração.
Descrição da configuração do HSC:
| HSC1 | HSC2 | Descrição |
| 40012.8pedaço | 40013.8pedaço | Bit de controle de nível ativo para Redefinir:
0 = Reset ativo baixo 1 = Reset ativo alto |
| 40012.9pedaço | 40013.9pedaço | Bit de controle de nível ativo para Iniciar:
0 = Partida ativa baixa 1 = Partida ativa alta |
| 40012.10pedaço | 40013.10pedaço | Bit de controle de direção de contagem:
0 = Contagem regressiva 1 = Contagem crescente |
| 40012.11pedaço | 40013.11pedaço | Escreva o novo valor atual no HSC:
0 = Sem atualização 1 = Atualizar valor atual |
| 40012.12pedaço | 40013.12pedaço | Habilite o HSC:
0 = Desativa o HSC 1 = Ativa o HSC |
| 40012.13pedaço | 40013.13pedaço | Reserva |
| 40012.14pedaço | 40013.14pedaço | Reserva |
| 40012.15pedaço | 40013.15pedaço | Reserva |
Modos HSC:
| Modo | Descrição | Entradas | |||
| HSC1 | DI1 | DI2 | DI5 | DI6 | |
| HSC2 | DI3 | DI4 | DI7 | DI8 | |
| 0 | Contador Monofásico com Direção Interna | Relógio | |||
| 1 | Relógio | Reiniciar | |||
| 2 | Relógio | Reiniciar | Começar | ||
| 3 | Contador Monofásico com Direção Externa | Relógio | Direção | ||
| 4 | Relógio | Direção | Reiniciar | ||
| 5 | Relógio | Direção | Reiniciar | Começar | |
| 6 | Contador Bifásico com 2 Entradas de Relógio | relógio para cima | relógio para baixo | ||
| 7 | relógio para cima | relógio para baixo | Reiniciar | ||
| 8 | relógio para cima | relógio para baixo | Reiniciar | Começar | |
| 9 | Contador do Codificador de Fase A/B | Relógio A | Relógio B | ||
| 10 | Relógio A | Relógio B | Reiniciar | ||
| 11 | Relógio A | Relógio B | Reiniciar | Começar | |
| 12 | Reserva | ||||
| 13 | Reserva | ||||
| 14 | Medição do período (com 10 μs samptempo de espera) | Período de entrada | |||
| 15 | Contador /
Período Ölçümü (1ms samptempo de espera) |
Máx. 15 kHz | Máx. 15 kHz | Máx. 1 kHz | Máx. 1 kHz |
Endereços Específicos para o Modo 15:
| Parâmetro | DI1 | DI2 | DI3 | DI4 | DI5 | DI6 | DI7 | DI8 | Padrão |
| Configuração Pedaços | 40193 | 40201 | 40209 | 40217 | 40225 | 40233 | 40241 | 40249 | 2 |
| Tempo de reinicialização do período (1-1000 sn) |
40196 |
40204 |
40212 |
40220 |
40228 |
40236 |
40244 |
40252 |
60 |
| Valor de 16 bits do contador de baixa ordem | 30094 | 30102 | 30110 | 30118 | 30126 | 30134 | 30142 | 30150 | – |
| Valor de 16 bits de alta ordem do contador | 30095 | 30103 | 30111 | 30119 | 30127 | 30135 | 30143 | 30151 | – |
| Valor de período de 16 bits de baixa ordem (ms) | 30096 | 30104 | 30112 | 30120 | 30128 | 30136 | 30144 | 30152 | – |
| Valor de período de 16 bits de alta ordem (ms) | 30097 | 30105 | 30113 | 30121 | 30129 | 30137 | 30145 | 30153 | – |
Configuração Pedaços:
| DI1 | DI2 | DI3 | DI4 | DI5 | DI6 | DI7 | DI8 | Descrição |
| 40193.0pedaço | 40201.0pedaço | 40209.0pedaço | 40217.0pedaço | 40225.0pedaço | 40233.0pedaço | 40241.0pedaço | 40249.0pedaço | Bit de habilitação DIx: 0 = Habilita DIx 1 = Desabilita DIx |
|
40193.1pedaço |
40201.1pedaço |
40209.1pedaço |
40217.1pedaço |
40225.1pedaço |
40233.1pedaço |
40241.1pedaço |
40249.1pedaço |
Bit de direção de contagem:
0 = Contagem regressiva 1 = Contagem crescente |
| 40193.2pedaço | 40201.2pedaço | 40209.2pedaço | 40217.2pedaço | 40225.2pedaço | 40233.2pedaço | 40241.2pedaço | 40249.2pedaço | Reserva |
| 40193.3pedaço | 40201.3pedaço | 40209.3pedaço | 40217.3pedaço | 40225.3pedaço | 40233.3pedaço | 40241.3pedaço | 40249.3pedaço | Bit de reinicialização da contagem DIx:
1 = Resetar o contador DIx |
Configurações de PID
O recurso de controle PID ou On/Off pode ser usado configurando os parâmetros determinados para cada entrada analógica no módulo. A entrada analógica com função PID ou ON/OFF ativada controla a saída digital correspondente. A saída digital associada ao canal cuja função PID ou ON/OFF está ativada não pode ser acionada manualmente.
- A entrada analógica AI1 controla a saída digital DO1.
- A entrada analógica AI2 controla a saída digital DO2.
- A entrada analógica AI3 controla a saída digital DO3.
- A entrada analógica AI4 controla a saída digital DO4.
- A entrada analógica AI5 controla a saída digital DO5.
Parâmetros PID:
| Parâmetro | Descrição |
| PID ativo | Habilita a operação PID ou ON/OFF.
0 = Uso manual 1 = PID ativo 2 = ON/OFF ativo |
| Definir valor | É o valor definido para PID ou operação ON/OFF. Os valores de PT100 podem estar entre -200.0 e 650.0 para entrada, 0 e 20000 para outros tipos. |
| Definir deslocamento | É usado como valor Set Offset na operação PID. Pode assumir valores entre -325.0 e
325.0 para entrada PT100, -10000 a 10000 para outros tipos. |
| Definir histerese | É usado como valor de Set Hysteresis na operação ON/OFF. Pode assumir valores entre
-325.0 e 325.0 para entrada PT100, -10000 a 10000 para outros tipos. |
| Valor Mínimo da Escala | A escala de trabalho é o valor limite inferior. Os valores de PT100 podem estar entre -200.0 e
650.0 para entrada, 0 e 20000 para outros tipos. |
| Valor Máximo da Escala | A escala de trabalho é o valor limite superior. Os valores de PT100 podem estar entre -200.0 e
650.0 para entrada, 0 e 20000 para outros tipos. |
| Valor Proporcional de Aquecimento | Valor proporcional para aquecimento. Pode assumir valores entre 0.0 e 100.0. |
| Valor Integral de Aquecimento | Valor integral para aquecimento. Pode assumir valores entre 0 e 3600 segundos. |
| Valor Derivado de Aquecimento | Valor derivado para aquecimento. Pode assumir valores entre 0.0 e 999.9. |
| Valor Proporcional de Resfriamento | Valor proporcional para resfriamento. Pode assumir valores entre 0.0 e 100.0. |
| Valor Integral de Resfriamento | Valor integral para resfriamento. Pode assumir valores entre 0 e 3600 segundos. |
| Valor Derivado de Resfriamento | Valor derivado para resfriamento. Pode assumir valores entre 0.0 e 999.9. |
| Período de saída | A saída é o período de controle. Pode assumir valores entre 1 e 150 segundos. |
| Seleção de aquecimento/resfriamento | Especifica a operação do canal para PID ou ON/OFF. 0 = Aquecimento 1 = Resfriamento |
| Ajuste automático | Inicia a operação de Auto Tune para PID.
0 = Auto Tune passivo 1 = Auto Tune ativo |
- Observação: Para os valores em notação de pontos, 10 vezes o valor real desses parâmetros são usados na comunicação Modbus.
Endereços PID Modbus:
| Parâmetro | AI1
Endereço |
AI2
Endereço |
AI3
Endereço |
AI4
Endereço |
AI5
Endereço |
Padrão |
| PID ativo | 40023 | 40043 | 40063 | 40083 | 40103 | 0 |
| Definir valor | 40024 | 40044 | 40064 | 40084 | 40104 | 0 |
| Definir deslocamento | 40025 | 40045 | 40065 | 40085 | 40105 | 0 |
| Deslocamento do Sensor | 40038 | 40058 | 40078 | 40098 | 40118 | 0 |
| Definir histerese | 40026 | 40046 | 40066 | 40086 | 40106 | 0 |
| Valor Mínimo da Escala | 40027 | 40047 | 40067 | 40087 | 40107 | 0/-200.0 |
| Valor Máximo da Escala | 40028 | 40048 | 40068 | 40088 | 40108 | 20000/650.0 |
| Valor Proporcional de Aquecimento | 40029 | 40049 | 40069 | 40089 | 40109 | 10.0 |
| Valor Integral de Aquecimento | 40030 | 40050 | 40070 | 40090 | 40110 | 100 |
| Valor Derivado de Aquecimento | 40031 | 40051 | 40071 | 40091 | 40111 | 25.0 |
| Valor Proporcional de Resfriamento | 40032 | 40052 | 40072 | 40092 | 40112 | 10.0 |
| Valor Integral de Resfriamento | 40033 | 40053 | 40073 | 40093 | 40113 | 100 |
| Valor Derivado de Resfriamento | 40034 | 40054 | 40074 | 40094 | 40114 | 25.0 |
| Período de saída | 40035 | 40055 | 40075 | 40095 | 40115 | 1 |
| Seleção de aquecimento/resfriamento | 40036 | 40056 | 40076 | 40096 | 40116 | 0 |
| Ajuste automático | 40037 | 40057 | 40077 | 40097 | 40117 | 0 |
| Valor de saída instantânea do PID (%) | 30024 | 30032 | 30040 | 30048 | 30056 | – |
| Bits de status do PID | 30025 | 30033 | 30041 | 30049 | 30057 | – |
| Bits de Configuração PID | 40039 | 40059 | 40079 | 40099 | 40119 | 0 |
| Bits de status de ajuste automático | 30026 | 30034 | 30042 | 30050 | 30058 | – |
Bits de configuração do PID:
| Endereço AI1 | Endereço AI2 | Endereço AI3 | Endereço AI4 | Endereço AI5 | Descrição |
| 40039.0pedaço | 40059.0pedaço | 40079.0pedaço | 40099.0pedaço | 40119.0pedaço | Pausa PID:
0 = a operação do PID continua. 1 = O PID está parado e a saída está desligada. |
Bits de status do PID:
| Endereço AI1 | Endereço AI2 | Endereço AI3 | Endereço AI4 | Endereço AI5 | Descrição |
| 30025.0pedaço | 30033.0pedaço | 30041.0pedaço | 30049.0pedaço | 30057.0pedaço | Status do cálculo do PID:
0 = Calculando PID 1 = PID não calculado. |
|
30025.1pedaço |
30033.1pedaço |
30041.1pedaço |
30049.1pedaço |
30057.1pedaço |
Estado do cálculo integral:
0 = Calculando a integral 1 = A integral não é calculada |
Bits de status de autoajuste:
| Endereço AI1 | Endereço AI2 | Endereço AI3 | Endereço AI4 | Endereço AI5 | Descrição |
| 30026.0pedaço | 30034.0pedaço | 30042.0pedaço | 30050.0pedaço | 30058.0pedaço | Status da primeira etapa do ajuste automático:
1 = A primeira etapa está ativa. |
| 30026.1pedaço | 30034.1pedaço | 30042.1pedaço | 30050.1pedaço | 30058.1pedaço | Status da segunda etapa do ajuste automático:
1 = A segunda etapa está ativa. |
| 30026.2pedaço | 30034.2pedaço | 30042.2pedaço | 30050.2pedaço | 30058.2pedaço | Status da terceira etapa do ajuste automático:
1 = A terceira etapa está ativa. |
| 30026.3pedaço | 30034.3pedaço | 30042.3pedaço | 30050.3pedaço | 30058.3pedaço | Status da etapa final do ajuste automático:
1 = Sintonização automática concluída. |
| 30026.4pedaço | 30034.4pedaço | 30042.4pedaço | 30050.4pedaço | 30058.4pedaço | Erro de tempo limite de ajuste automático:
1 = Há um tempo limite. |
Instalando as configurações de comunicação por padrão
Para cartões com versão V01;
- Desligue o dispositivo do Módulo de E/S.
- Levante a tampa do dispositivo.
- Curto-circuite os pinos 2 e 4 no soquete mostrado na figura.
- Aguarde pelo menos 2 segundos energizando. Após 2 segundos, as configurações de comunicação retornarão ao padrão.
- Remova o curto-circuito.
- Feche a tampa do dispositivo.
Para cartões com versão V02;
- Desligue o dispositivo do Módulo de E/S.
- Levante a tampa do dispositivo.
- Coloque um jumper no soquete mostrado na figura.
- Aguarde pelo menos 2 segundos energizando. Após 2 segundos, as configurações de comunicação retornarão ao padrão.
- Remova o jumper.
- Feche a tampa do dispositivo.
Seleção de Endereço Escravo Modbus
O endereço do escravo pode ser definido de 1 a 255 no endereço 40001 do modbus. Além disso, o Dip Switch no cartão pode ser usado para definir o endereço escravo nos cartões V02.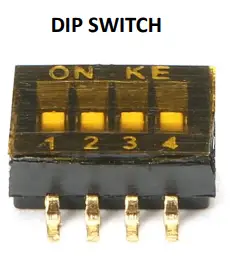
| INTERRUPTOR DIP | ||||
| ESCRAVO ID | 1 | 2 | 3 | 4 |
| Not1 | ON | ON | ON | ON |
| 1 | DESLIGADO | ON | ON | ON |
| 2 | ON | DESLIGADO | ON | ON |
| 3 | DESLIGADO | DESLIGADO | ON | ON |
| 4 | ON | ON | DESLIGADO | ON |
| 5 | DESLIGADO | ON | DESLIGADO | ON |
| 6 | ON | DESLIGADO | DESLIGADO | ON |
| 7 | DESLIGADO | DESLIGADO | DESLIGADO | ON |
| 8 | ON | ON | ON | DESLIGADO |
| 9 | DESLIGADO | ON | ON | DESLIGADO |
| 10 | ON | DESLIGADO | ON | DESLIGADO |
| 11 | DESLIGADO | DESLIGADO | ON | DESLIGADO |
| 12 | ON | ON | DESLIGADO | DESLIGADO |
| 13 | DESLIGADO | ON | DESLIGADO | DESLIGADO |
| 14 | ON | DESLIGADO | DESLIGADO | DESLIGADO |
| 15 | DESLIGADO | DESLIGADO | DESLIGADO | DESLIGADO |
- Nota 1: Quando todos os Dip Switches estiverem LIGADOS, o valor no registro Modbus 40001 é usado como o endereço escravo.
Garantia
Este produto tem garantia contra defeitos de materiais e mão de obra por um período de dois anos a partir da data de envio ao comprador. A Garantia é limitada ao reparo ou substituição da unidade defeituosa a critério do fabricante. Esta garantia será anulada se o produto for alterado, mal utilizado, desmontado ou abusado de outra forma.
Manutenção
Os reparos devem ser executados apenas por pessoal treinado e especializado. Corte a energia do dispositivo antes de acessar as partes internas. Não limpe a caixa com solventes à base de hidrocarbonetos (gasolina, tricloroetileno, etc.). O uso desses solventes pode reduzir a confiabilidade mecânica do dispositivo.
Outras informações
- Informações do fabricante:
- Emko Elektronik Sanayi e Ticaret A.Ş.
- Bursa Organize Sanayi Bölgesi, (Fethiye OSB Mah.)
- Ali Osman Sönmez Bulvarı, 2. Sokak, No:3 16215
- BURSA/TURQUIA
- Telefone : (224) 261 1900
- Fax: (224) 261 1912
- Informações sobre serviços de reparo e manutenção:
- Emko Elektronik Sanayi e Ticaret A.Ş.
- Bursa Organize Sanayi Bölgesi, (Fethiye OSB Mah.)
- Ali Osman Sönmez Bulvarı, 2. Sokak, No:3 16215
- BURSA/TURQUIA
- Telefone : (224) 261 1900
- Fax: (224) 261 1912
Documentos / Recursos
 |
Módulo de entrada ou saída EMKO PROOP [pdf] Manual do Usuário PROOP, Módulo de Entrada ou Saída, Módulo de Entrada ou Saída PROOP, Módulo de Entrada, Módulo de Saída, Módulo |



