![]() Manual pangguna
Manual pangguna![]()

Pranyatan Hak Cipta
Ora ana unit utawa individu sing bisa ngekstrak, nyusun, nerjemahake utawa ngasilake isi manual iki (umpamane: dokumentasi teknis, piranti lunak, lsp.), utawa nyebarake kanthi bentuk apa wae (kalebu materi lan publikasi) tanpa idin tinulis saka Shenzhen Elephant Robotics Technology Co. ., Ltd. (sabanjuré diarani "Robot Gajah").
Kajaba iku, informasi produk lan sumber daya sing gegandhengan sing kasebut ing manual iki mung kanggo referensi lan isi bisa diganti tanpa kabar.
Kajaba sing kasebut kanthi jelas ing manual iki, ora ana apa-apa ing manual iki sing kudu dianggep minangka garansi utawa jaminan dening Robot Gajah babagan kerugian pribadi, karusakan ing properti, utawa kabugaran kanggo tujuan tartamtu. Kabeh hak dilindhungi undhang-undhang!
|
Versi |
Katrangan |
Cathetan |
| V 2020.12.31 | Nambahake gambar myCobot【set standar】, Majelis Dasar, lan Majelis Akhir | |
| V 2021.02.04 | Ditambahake tukang gambar Sistem Koordinasi, Piranti Lunak MyStudio |
Swaraview
Babagan manual
Sugeng rawuh nggunakake robot kolaboratif MyCobot lan matur nuwun kanggo tuku.
Manual iki njlèntrèhaké pancegahan kanggo instalasi tepat lan nggunakake MyCobot. Waca manual iki lan manual liyane sing gegandhengan kanthi teliti sadurunge nginstal sistem robot iki. Sawise maca, mangga simpen ing papan sing aman supaya sampeyan bisa ngakses kapan wae. Maca obyek saka manual
Manual iki ditargetake kanggo:
- installer.
- Debugger.
- Staff pangopènan.
 |
Sing nginstal / debug / njaga robot kolaborasi MyCobot kudu dilatih ing Elephant Robotics lan duwe kawruh mekanik lan elektronik sing dibutuhake kanggo karya ing ndhuwur. |
Carane nggunakake
Manual iki kudu digunakake nalika nindakake karya ing ngisor iki:
- Karya instalasi: Pindhah robot menyang posisi kerja lan ndandani menyang pangkalan miturut instruksi instalasi.
- Debugging: Debugging robot kanggo status kerja.
- Karya pangopènan: sistem robot pangopènan biasa kanggo njamin fungsi normal. Nalika robot gagal amarga pengaruh lingkungan utawa operasi pangguna sing ora bener, utawa komponen sistem robot tartamtu ngluwihi umur layanan normal, robot kasebut kudu didandani.
Cathetan:
- Manual iki ditrapake kanggo pangguna internasional, uga pangguna ing Hong Kong, Macao, lan Taiwan.
- Manual iki ora dianyari ajeg. Tanggal sing dianyari yaiku nomer versi. Pangguna bisa ndownload versi paling anyar saka resmi websitus Robot Gajah kapan wae.
Keamanan
Bab iki rincian informasi safety umum kanggo wong sing nindakake instalasi, pangopènan, lan ndandani karya ing robot. Mangga waca lan mangerteni isi lan pancegahan bab iki sadurunge nangani, nginstal, lan nggunakake.
1.1 Identifikasi Bahaya
Keamanan robot kolaborasi adhedhasar premis konfigurasi lan panggunaan robot sing tepat, lan sanajan kabeh instruksi safety diamati, ciloko utawa karusakan sing disebabake dening operator bisa uga kedadeyan. Mulane, penting banget kanggo mangerteni bebaya safety saka panggunaan robot, sing migunani kanggo nyegah masalah sadurunge kedadeyan.
Tabel 1-2~4 ing ngisor iki minangka bebaya safety umum sing bisa uga ana ing konteks nggunakake robot:
Tabel 1- 2 Bebaya safety mbebayani
 |
|
| 1 | Cilaka pribadi utawa karusakan robot sing disebabake dening operasi sing salah nalika nangani robot. |
| 2 | Cilaka pribadi utawa karusakan robot disebabake amarga robot ora tetep kaya sing dibutuhake, contoneample, meneng ora ngaco utawa tightened, lan basa ora cukup kanggo stably ndhukung robot kanggo gerakan-kacepetan dhuwur, nyebabake robot tip mudhun. |
| 3 | Gagal nindakake konfigurasi fungsi safety robot sing tepat, utawa instalasi alat proteksi safety, lan sapiturute, bisa nyebabake fungsi safety robot gagal. |
Tabel 1-3 Risiko keamanan tingkat peringatan
 |
|
| 1 | Muter-muter karo robot, sampeyan bisa uga ditabrak robot sing mlaku, utawa kesandung alangan kayata kabel sing nyebabake ciloko pribadi. |
| 2 | Personel sing ora sah ngganti paramèter konfigurasi keamanan, nyebabake fungsi safety gagal utawa bebaya. |
| 3 | Goresan lan tusukan disebabake lumahing sing cetha kayata piranti liyane ing lingkungan kerja utawa efektor mburi robot. |
| 4 | Robot kasebut minangka mesin presisi lan pedaling bisa nyebabake karusakan ing robot kasebut. |
|
5 |
Yen clamp ora ana ing panggonan utawa sadurunge sumber daya robot dipateni utawa sumber gas dipateni (ora ditemtokake manawa efektor pungkasan kanthi kuat nyekel obyek kasebut tanpa tiba amarga kelangan daya). Yen clampobyek ora dicopot, bisa nyebabake bebaya, kayata wong sing tatu amarga nabrak. |
| 6 | Ana risiko gerakan robot sing ora disengaja. Ing kahanan apa wae sampeyan kudu ngadeg ing sumbu robot! |
| 7 | Robot minangka mesin presisi. Yen ora diselehake kanthi lancar nalika ditangani, bisa nyebabake geter lan bisa nyebabake karusakan ing komponen internal robot. |
Tabel 1-4 Potensi bebaya safety sing bisa nyebabake kejut listrik
 |
|
| 1 | Nggunakake kabel sing ora asli bisa nyebabake bebaya sing ora dingerteni. |
| 2 | Kontak karo cairan dening peralatan listrik bisa nyebabake kebocoran listrik. |
| 3 | Bisa uga ana bebaya kejut listrik nalika sambungan listrik ora bener. |
| 4 | Dadi manawa kanggo nangani karya panggantos sawise mateni daya kanggo controller lan peralatan sing gegandhengan lan copot kabel daya. Yen karya ditindakake nalika daya urip, bisa nyebabake kejut listrik utawa malfungsi. |
1.2 Pancegahan Safety
Aturan keamanan ing ngisor iki kudu ditindakake nalika nggunakake robotku:
- mycobiota yaiku peralatan listrik. Teknisi non-profesional ora bisa ngowahi kabel kasebut, yen ora, bisa ngrusak piranti utawa wong kasebut.
- Tandha BAHAYA, WARNING ing manual iki mung tambahan kanggo pancegahan keamanan.
- Mangga gunakake mycobiota ing ruang lingkup lingkungan tartamtu. Yen ora, ngluwihi spesifikasi lan kahanan mbukak bakal nyepetake umur layanan produk malah ngrusak peralatan.
- Sadurunge ngoperasikake lan njaga mycobiota, personel sing tanggung jawab kanggo instalasi, operasi, lan pangopènan kudu dilatih kanggo ngerti macem-macem pancegahan keamanan lan cara operasi lan pangopènan sing bener.
- Aja nggunakake mycobiota ing iklanamp lingkungan kanggo dangu supaya supaya karusakan, myCobot belongs kanggo komponen elektronik tliti.
- Aja nggunakake mycobiota ing lingkungan suhu dhuwur. Lumahing njaba mycobiota digawe saka resin fotosensitif minangka bahan mentah, suhu dhuwur bakal ngrusak cangkang lan nyebabake kegagalan.
- Reresik banget korosif ora cocog kanggo ngresiki mycobiota. Komponen anodized ora cocok kanggo reresik immersion.
- Aja nggunakake robotku tanpa dhasar sing dipasang supaya ora ngrusak peralatan utawa kacilakan. myCobot kudu digunakake ing lingkungan sing tetep lan ora ngganggu.
- Aja nggunakake adaptor daya liyane kanggo sumber daya kanggo myCobot Yen rusak amarga nggunakake adaptor nonconforming, iku ora bakal klebu ing layanan sawise-sales.
- Mangga aja mbongkar utawa mbongkar sekrup lan cangkange. Yen dibukak, ora ana layanan garansi sing bisa diwenehake.
- Wong ora bisa ndandani myCobot tanpa latihan profesional. Yen ana masalah karo robotku, hubungi teknisi dhukungan teknis myCobot.
- Mangga tundhuk karo undang-undang sing relevan kanggo ngatasi mycobiota sing wis dibusak, lan nglindhungi lingkungan.
- Aja ngidini bocah-bocah dolanan karo robotku dhewe. Kabeh proses kudu dipantau nalika mlaku. Sawise proses rampung, mateni peralatan kasebut kanthi cepet.
- Dilarang ngowahi utawa mbusak papan jeneng, instruksi, lambang, lan tandha ing lengen robot lan peralatan sing ana gandhengane.
- Aja ngobong driver produk liyane menyang terminal Atom. Yen piranti rusak amarga iku, iku ora bakal klebu ing layanan sawise-sales.
Aja nggunakake robot kolaborasi Chatbot kanggo tujuan ing ngisor iki. - Aplikasi medis lan kritis urip.
- Ing lingkungan sing bisa nyebabake bledosan.
- Digunakake langsung tanpa penilaian resiko.
- Ora cukup nggunakake tingkat fungsi safety.
- Panggunaan parameter kinerja robot sing ora konsisten.
Yen sampeyan duwe pitakon babagan manual iki, bukak lan kirim tanggapan sampeyan babagan:https://www.elephantrobotics.cn.
1.3 Skenario panggunaan
Babagan mycobiota
2.1 Latar mburi
Njunjung misi "Enjoy Robots World", Elephant Robotics ngrancang lan ngembangake mycobiota, robot kolaboratif paling cilik lan paling entheng ing donya, njaga sebagian besar fungsi robot industri. Kanthi desain industri sing kompak lan elegan, kinerja sing apik lan kuat, lan papan pangembangan piranti lunak lan piranti keras sing gedhe, myCobot duwe kemungkinan tanpa watesan ing ekspansi aplikasi.
Prototipe desain mycobiota yaiku saka Robot All-in-one sing diluncurake dening Robot Gajah ing China ing 2018. Minangka robot kolaborasi terintegrasi pisanan ing China, wis menangake Penghargaan Inovasi Robot Industri CAIMRS 2019 lan Robot Teknologi Tinggi 2019 "Inovasi" Teknologi bangsal", lan uga wis didol kanggo luwih saka 30 negara ing ngarep lan ing luar negeri, nampa pujian unanimous lan pangenalan saka pabrik saka ndhuwur 500 Enterprises donya.
2.2 Pambuka
mycobiota minangka robot kolaborasi enem sumbu paling cilik lan paling entheng ing donya, diprodhuksi bebarengan dening Elephant Robotics lan M5Stack. Iku luwih saka alat produktivitas kebak bayangan, bisa nindakake pembangunan secondary miturut panjaluk pangguna kanggo entuk kustomisasi pribadi.
Kanthi bobot 850g, muatan 250g, lan dawane 350mm, myCobot kompak nanging kuat, ora mung bisa dicocogake karo macem-macem efektor pungkasan kanggo adaptasi karo macem-macem skenario aplikasi uga ndhukung pangembangan sekunder. piranti lunak multi-platform kanggo nyukupi kabutuhan macem-macem skenario kayata riset ilmiah lan pendhidhikan, omah cerdas, industri ringan, lan aplikasi komersial.
myCobot - Parameter dhasar
| Gelar Kebebasan | 6 |
| Muatan | 250g |
| Rentang lengan | 350 mm |
| Radius kerja | 280 mm |
| Repeatability | ± 0.5 mm |
| Bobot | 850g |
| Daya Input | 8V, 5A |
| Kondisi Kerja | -5°~45° |
| Komunikasi | USB Tipe-C |
2.3 Fitur
- Desain Industri Unik & Kompak banget
mycobiota minangka desain modular terpadu lan bobote mung 850g sing gampang banget digawa. Struktur awak sakabèhé kompak karo suku cadang sing luwih sithik lan bisa dibongkar lan diganti kanthi cepet kanggo nyadari plug and play. - Konfigurasi dhuwur & Dilengkapi 2 Layar
myCobot ngemot 6 motor servo kanthi kinerja dhuwur kanthi respon cepet, inersia cilik, lan lancar
rotasi. Awak nggawa 2 layar tampilan ndhukung perpustakaan cepet kanggo nuduhake aplikasi ditambahi
adegan luwih gampang lan cetha. - Konektor Lego & Ewonan Aplikasi Ekologis M5STACK
Dasar lan mburi mycobiota dilengkapi Konektor Lego, sing cocog kanggo pangembangan macem-macem peralatan miniatur sing dipasang. Dasare dikontrol dening M5STACK Basic, lan ewu kasus aplikasi bisa digunakake langsung. - Blocky Programming & Supporting Industrial ROS
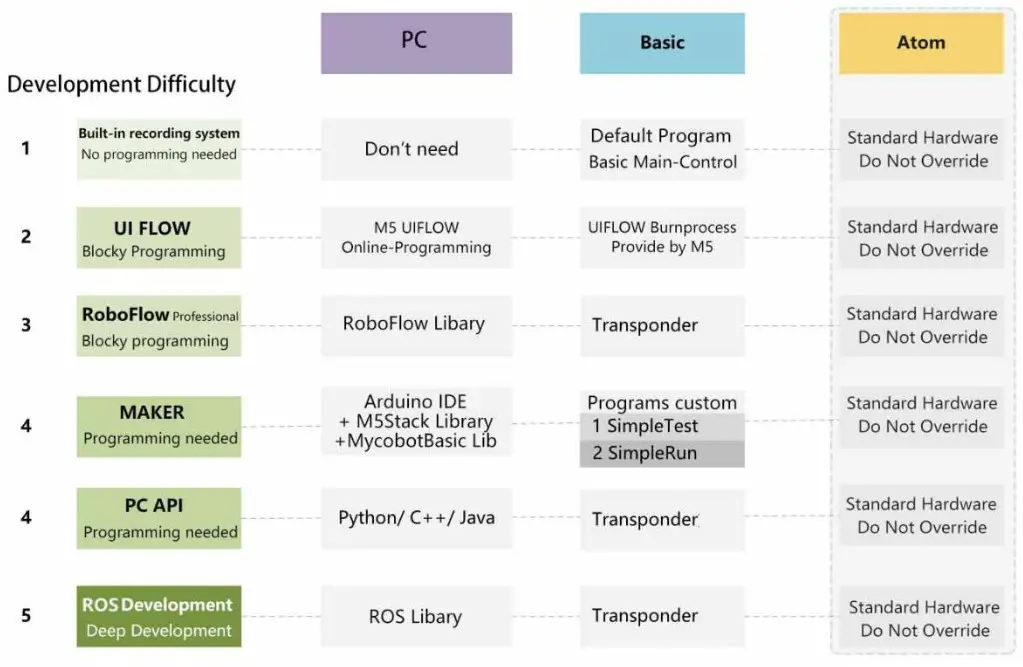
Nggunakake piranti lunak pemrograman visual UIFlow, program robotku gampang lan gampang kanggo kabeh wong.
Sampeyan uga bisa nggunakake RoboFlow, piranti lunak robot industri saka Elephant Robotics, ndhukung macem-macem modul fungsional Arduino + ROS sistem open-source. - Rekaman Lacak & Sinau nganggo tangan
Mbusak mode ngirit titik tradisional, myCobot ndhukung wulangan nyoba seret kanggo ngrekam trek sing disimpen lan bisa ngirit nganti 60 menit Trek sing beda supaya gampang lan nyenengake kanggo sinau pemain anyar.
2.4 Paten
Paten sing gegandhengan babagan robotku
|
Ora. |
No. Sertifikat | Jeneng Paten | Paten No. |
Pateni |
| 1 | No.8194138 | Hubungan lengan mekanik dan lengan mekanik | ZL 2018 20017484.4 | Robotika Gajah |
| 2 | No.8186088 | Konektor sambungan lengan mekanik dan lengan mekanik | ZL 2017 21700594.2 | Robotika Gajah |
| Ora. | produk | Jinis Paten | judhul |
Paten No. |
| 1 | Lengan robot ringan | Paten katon | Lengan Robot Kolektif | 2020030683471.3 |
|
Ora. |
judhul penemuan |
Nomer Aplikasi |
| 1 | Metode lan sistem kanggo njaga postur robot, nyeret, lan mulang | ZL 2018 1 1634649.3 |
| 2 | Cara lan sistem deteksi tabrakan online robot adhedhasar model momentum | ZL 2019 1 0030748.9 |
| 3 | Sawijining Cara Identifikasi Parameter Dinamis Robot Independen saka Percepatan Sudut Gabungan | ZL 2019 1 0773865.4 |
Hardware
3.1 Pengontrol lan Aktuator
3.1.1 M5STACK Pangontrol Utama dhasar
M5STACK BASIC Kit, kaya jenenge, minangka kit wiwitan ing antarane seri kit pangembangan M5STACK.
Iku piranti modular, stackable, keukur, lan hotspot sing powered karo inti ESP-32, kang ndadekake open-source, biaya murah, full-fungsi, lan gampang kanggo pangembang kanggo nangani pangembangan produk anyar ing kabeh s.tagkalebu desain sirkuit, desain PCB, piranti lunak, desain cetakan, lan produksi. Kit Dasar iki nyedhiyakake rega sing ramah lan sumber daya lengkap sing ndadekake kit wiwitan sing apik kanggo sampeyan njelajah IoT.
Yen sampeyan pengin njelajah cara paling cepet prototyping IoT, Papan pangembangan M5STACK solusi sampurna. Ora kaya liyane, papan pangembangan M5STACK efisien banget, ditutupi kasus kelas industri lan papan pangembangan adhedhasar ESP32. Digabungake karo modul Wi-Fi & Bluetooth lan ngemot dual-inti lan 16MB SPI Flash. Bebarengan karo 30+ modul stackable M5Stack, 40+ unit sing bisa diperpanjang, lan tingkat basa program sing beda, sampeyan bisa nggawe lan verifikasi produk IoT ing wektu sing cendhak.
Platform pangembangan lan basa pamrograman sing ndhukung: Arduino, Basa Blocky karo UIFlow, Micropython. Preduli saka tingkat katrampilan pemrograman sing sampeyan duwe, M5STACK bakal nuntun sampeyan ing saben langkah kanggo mujudake ide sampeyan uga menyang produksi pungkasan. Yen sampeyan tau main nganggo ESP8266, sampeyan bakal ngerti manawa ESP32 minangka upgrade sing sampurna saka ESP8266. Ing comparison, ESP32 wis luwih GPIOs, luwih input analog, loro output analog, sawetara peripheral ekstra (kaya UART nyisakke). Platform pangembangan resmi ESP-IDF wis ditransplantasikan karo FreeRTOS. Kanthi OS dual-inti lan nyata-wektu, sampeyan bisa njaluk kode luwih diatur lan prosesor kacepetan dhuwur.
M5STACK Basic kalebu rong bagean sing bisa dipisahake. Sisih ndhuwur duwe kabeh jinis prosesor, chip, lan sawetara komponen slot liyane. soket M-BUS, lan pin extendable ing loro-lorone.
3.1.1.1 Fitur Produk
- adhedhasar ESP32
- Speaker, Tombol, LCD Warna, Tombol Daya/Reset
- Slot kertu TF (ukuran maksimal 16G)
- Nyedhot Magnetik ing mburi
- Pins Extendable & bolongan
- M-Bus Socket & Pins
- Platform Program: UIFlow, MicroPython, Arduino
3.1.1.2 Paramèter
| Sumber daya | Paramèter |
| ESP32-D0WDQ6 | 240MHz dual-core, 600 DMIPS, 520KB SRAM, Wi-Fi, dual-mode Bluetooth |
| lampu kilat | 16 MB |
| Daya Input | 5V @ 500mA |
| Pelabuhan | TipeC x 1, GROVE(I2C+I/0+UART) x 1 |
| Port Ngisor inti | PIN (G1,G2,G3,G16, G17, G18, G19, G21, G22, G23, G25, G26, G35, G36) |
| Layar IPS | 2 inci, 320×240 LCD TFT Warna-warni, ILI9342C, Brightness853nit |
| Speaker | 1W-0928 |
| Tombol | Tombol khusus x 3 |
| Antena | 2.4G 3D Antena |
| Suhu operasi | 32°F nganti 104°F (0°C nganti 40°C) |
| Bobot Net | 47.2g |
| Bobot reged | 93g |
| Ukuran produk | 54 x 54 x 18 mm |
| Ukuran Paket | 95 x 65 x 25 mm |
| Materi kasus | Plastik (PC) |
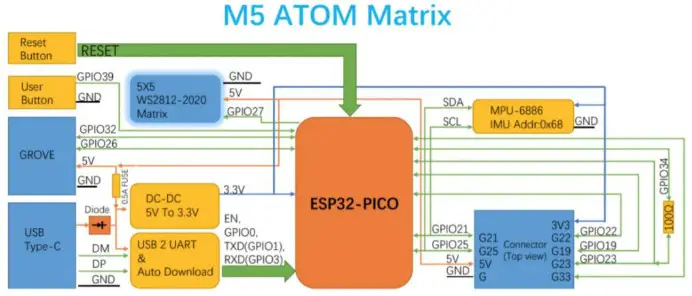
3.1.2 M5STACK Atom
ATOM Matrix, sing ukurane mung 24 * 24mm, minangka papan pangembangan paling kompak ing seri kit pangembangan M5Stack. Nyedhiyakake luwih akeh pin GPIO lan cocog banget kanggo pangembangan piranti sing praktis lan miniatur.
Kontrol utama nganggo chip ESP32-PICO-D4, sing digabungake karo teknologi Wi-Fi lan Bluetooth lan duwe memori flash SPI terintegrasi 4MB. Papan Atom nyedhiyakake LED Infra-Red bebarengan karo matriks LED 5 * 5 RGB ing panel, sensor IMU sing dibangun ing (MPU6886), lan antarmuka HY2.0. Tombol sing bisa diprogram kanthi tujuan umum diwenehake ing ngisor matriks RGB Led supaya pangguna bisa nambah dhukungan input menyang macem-macem proyek. Antarmuka USB onboard (Tipe-C) ngidini upload lan eksekusi program kanthi cepet. Siji bolongan meneng M2 kasedhiya ing mburi kanggo soyo tambah Papan.
Cathetan: Nalika nggunakake manipulator, aja ngobong perangkat kukuh menyang ATOM ing mburi manipulator. Piranti kasebut mung ndhukung perangkat kukuh asli kita.
Mangga mangertos kahanan kang ora nyaman kanggo sampeyan.
3.1.2.1 Fitur
- ESP32 adhedhasar PICO
- Tombol sing bisa diprogram
- 5*5 RGB LED matriks panel (WS2812C)
- Dibangun ing LED Infra-abang
- Sensor Inersia MPU6886 sing dibangun ing
- Pins Extendable & bolongan
- Platform Program: Arduino UIFlow
3.1.2.2 Spesifikasi
| Sumber daya | Paramèter |
| ESP32 | 240MHz dual-core, 600 DMIPS, 520KB SRAM, Wi-Fi, dual-mode Bluetooth |
| lampu kilat | 4 MB |
| Daya Input | 5V @ 500mA |
| Pelabuhan | TipeC x 1, GROVE(I2C+I/0+UART) x 1 |
| Antarmuka PIN | G19, G21, G22, G23, G25, G33 |
| RGB LED | WS2812C 2020 x 25 |
| MEMS | MPU6886 |
| IR | Transmisi infra merah |
| Tombol | Custom ngisor x 1 |
| Antena | 2.4G 3D Antena |
| Suhu operasi | 32°F nganti 104°F (0°C nganti 40°C) |
| bobot net | 3g |
| Bobot reged | 14g |
| Ukuran produk | 24 x 24 x 14 mm |
| Ukuran paket | 24 x 24 x 14 mm |
| Materi kasus | Plastik (PC) |
3.1.3 Motor Servo
myCobot nuduhake 6 servo servo kinerja dhuwur ing 6 joints karo advantages respon cepet, inersia cilik, rotasi Gamelan, torsi stabil, etc.
| Sumber daya | Paramèter |
| Ukuran | 23.2 * 12.1 * 28.5 mm |
| Input daya | 4.8~7.4V |
| Suhu operasi | -15~70° |
| Dirating torsi | 1.5kg.cm@6V |
| Torsi kios | 4.5kg.cm@6V |
| Sudut rotasi | 300 ° (Sudut bisa diwatesi dening piranti lunak) |
3.2 Struktur Mekanik
3.2.1 Ukuran lan sawetara kerja
A) mycobiota
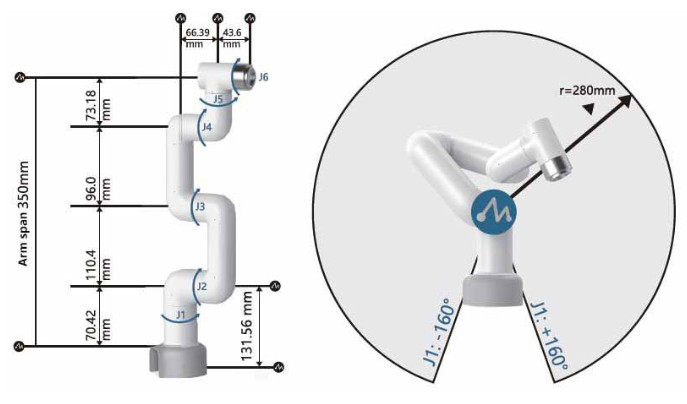
myCobot -Tabel saka joint range of motion
| J1 | -165 ~ +165 | J3 | -165 ~ +165 | J5 | -165 ~ +165 |
| J2 | -165 ~ +165 | J4 | -165 ~ +165 | J6 | -175 ~ +175 |
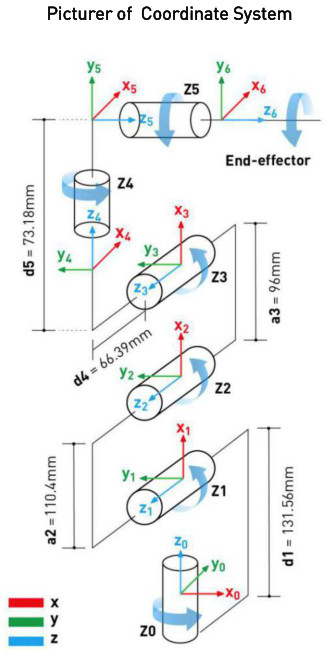
Gambar Sistem Koordinat
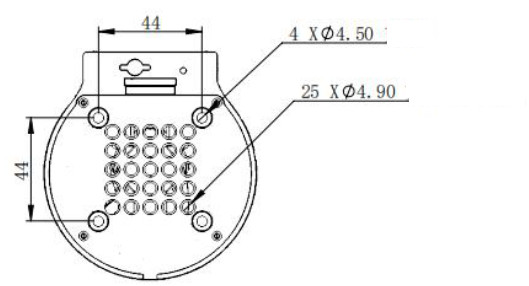
B) Majelis Dasar
Dasar kompatibel karo loro bolongan komponen Lego-tech lan bolongan meneng liwat-bolongan.
C) Majelis pungkasan
Pungkasan kompatibel karo bolongan komponen teknologi Lego lan benang sekrup.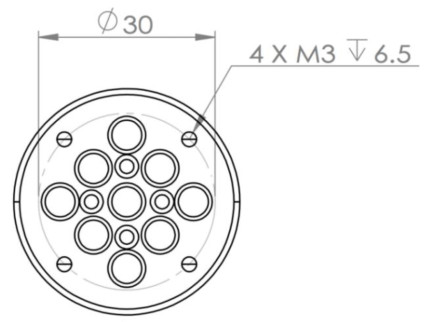
3.2.2 Mbukak lan Instalasi
3.2.2.1 Mbukak kemasan
Cathetan: Sawise kothak kemasan ana, konfirmasi manawa kemasan robot kasebut utuh lan ora rusak. Yen ana karusakan, hubungi perusahaan logistik lan supplier lokal ing wektu. Sawise mbongkar, priksa barang sing bener ing kothak miturut dhaptar item.

| myCobot【set standar】 | -myCobot-280 - Brosur - Power Supply -USB-Tipe C - Jumper -M4 * 35, sekrup stainless steel - Kunci heksagonal |
Mangga instal sistem robot ing lingkungan sing nyukupi kahanan sing diterangake ing tabel supaya bisa ngetrapake lan njaga kinerja mesin lan digunakake kanthi aman.
Lingkungan Operasi lan Kahanan
| Suhu | -10 ℃ ~ 45 ℃ |
| Kelembapan relatif | 20%~70% |
| Ing njero ruangan / ruangan | njero ruangan |
| Syarat Lingkungan liyane | - Nyingkiri srengenge. - Jauhi bledug, asap lenga, uyah, filing wesi, lsp. - Tetep adoh saka cairan lan gas sing gampang kobong lan korosif. - Aja kontak karo banyu. - Ora ngirimake kejut, geter, lsp. - Tetep adoh saka sumber gangguan elektromagnetik sing kuwat. |
3.2.2.2 Instalasi
Bobot nyata robot kolaboratif mycobiota yaiku 850g. Ngelingi obahe robot, pusat gravitasi bakal obah nalika robot obah. Mulane, robot kasebut kudu dipasang ing basis sing padhet supaya bisa digunakake kanthi normal.
Ukuran antarmuka basis robot: Bolongan fixing pedestal yaiku antarmuka sing ndandani robot menyang pangkalan utawa pesawat liyane. Ukuran bolongan tartamtu ditampilake ing ngisor iki. Iku 4 liwat bolongan karo diameteripun saka 4.5mm, kang bisa didandani karo M4 bolts.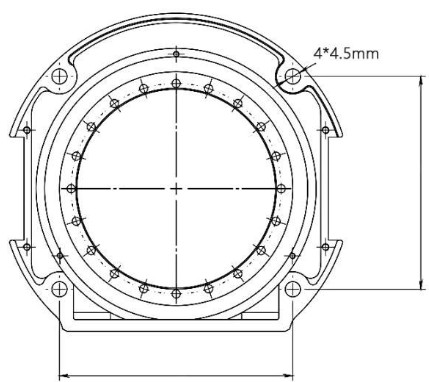
Priksa manawa ana bolongan Utas sing cocog ing basis tetep sadurunge nginstal. Sadurunge nginstal kanthi resmi, konfirmasi:
- Lingkungan sing bakal diinstal tundhuk karo syarat ing ndhuwur.
- Posisi instalasi ora kurang saka kisaran kerja robot, lan ana cukup ruang
kanggo instalasi, nggunakake, pangopènan, lan ndandani. - Selehake stand ing posisi sing tepat.
- Piranti sing ana gandhengane karo instalasi wis siyap, kayata sekrup, kunci pas, lsp.
Sawise konfirmasi ing ndhuwur, pindhah robot menyang lumahing soyo tambah saka basa, nyetel posisi robot, lan kempal bolongan mbenakake basa robot karo bolongan ing lumahing soyo tambah saka basa.
Cathetan: Nalika nyetel posisi robot ing basa soyo tambah, please supaya meksa nindakake perkara robot langsung ing lumahing soyo tambah saka basa supaya goresan. Nalika ngobahake robot kanthi manual, coba aja ngetrapake kekuwatan eksternal menyang bagian awak robot sing ringkih kanggo ngindhari karusakan sing ora perlu ing robot kasebut.
3.3 Elektronika lan Listrik
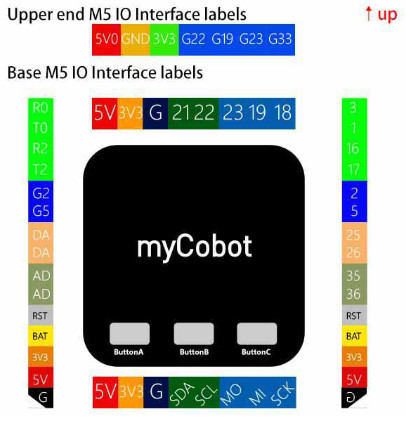
myCobot wis telung terminal external. Padha terminal external M5Stack Basic ing basa, loro terminal Grove cedhak soket daya lan pin terminal external M5Stack Atom J6 peserta.
a)M5STACK Diagram Listrik Dasar

b) Diagram Sirkuit Atom M5STACK
c) Diagram Antarmuka IO
Piranti lunak
Kanggo nganyari piranti lunak, priksa dhisik Github kita. https://github.com/elephantrobotics/myCobot
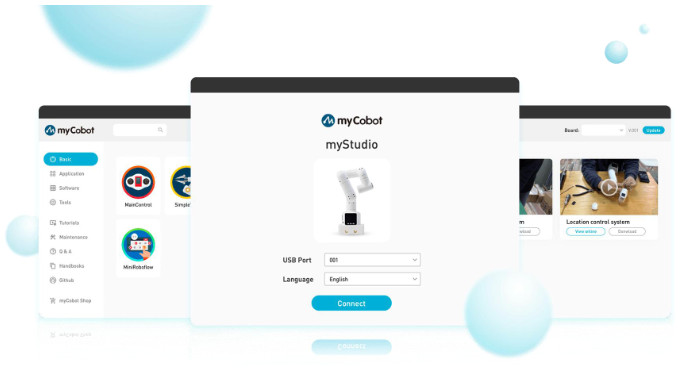
4.1 Nganyarke lan Recovery Firmware - studioku
studioku minangka platform siji-mandeg kanggo robot robot / mycobiota.
Fungsi utama studioku yaiku: 1) Nganyari perangkat kukuh; 2) Nyedhiyani video tutorial babagan carane nggunakake robot; 3) Nyedhiyakake informasi pangopènan lan ndandani (kayata tutorial video, Q&A, lsp.).
Link menyang video youtube babagan myStudio yaiku: https://youtu.be/Kr9i62ZPf4w
Yen sampeyan kudu nganyarke utawa njaga mycobiota, priksa manawa lingkungan pangembangan wis disetel. Yen ora, mangga instal driver port serial dhisik lan banjur nyoba kanggo nggunakake piranti lunak. Link download minangka nderek:
Resmi websitus: https://www.elephantrobotics.com/myCobot/
Github: https://github.com/elephantrobotics/MyStudio/
Yen sampeyan nggunakake sistem Windows, pilih "my studio-windows.exe" kanggo ngundhuh, banjur unzip menyang folder project. Ati-ati aja nganggo dalan sing rumit, sing bisa nyebabake masalah karo jalur sing ora dingerteni.
Yen lingkungan pangembangan sampeyan wis disetel, sampeyan bisa langsung mbukak file "myCobot. exe”.
Sawise mbukak, antarmuka kaya ing ngisor iki: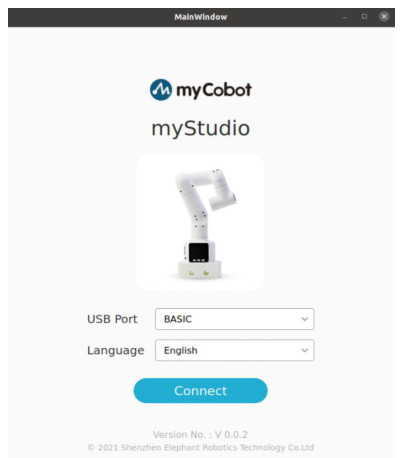
Sambungake myCobot karo "Basic" utawa "Atom", pilih "basa" banjur klik "Sambungake" kanggo ngetik antarmuka utama ditampilake ing ngisor iki: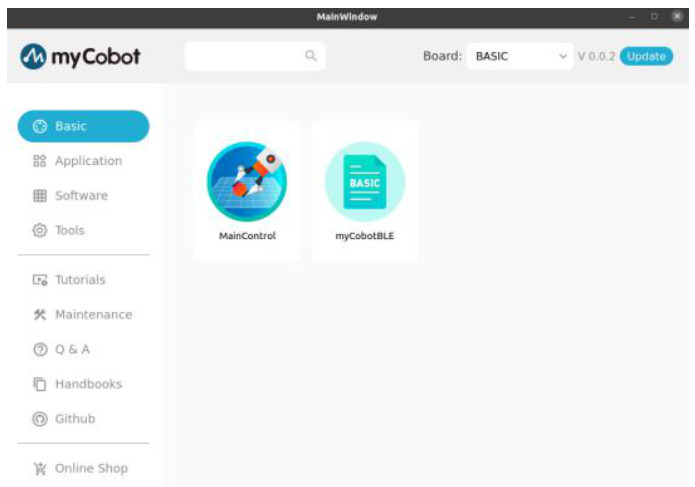
Yen sampeyan nyambungake loro dhasar lan Atom, Pilih piranti lunak sing pengin diobong maneh ing Papan bar ing pojok tengen ndhuwur, banjur klik dhasar utawa Piranti kanggo milih perangkat kukuh sing pengin diobong.
4.2 Rekaman Track Dibangun
M5STACK Papan kontrol utama dhasar nduweni 3 tombol sing ndhukung pemrograman khusus lan nulis data. Program iki mbukak sumber, sampeyan bisa mriksa GitHub kita.
Demonstrasi Pengajaran Seret
- Ngrekam: Sawise ngetik mode rekaman, pilih lokasi panyimpenan rekaman

Tombol A: Simpen kanggo Ram
Tombol B: Simpen menyang Kertu Memori
Tombol C: Metu saka Mode Rekaman - Mulai Rekam

Sawise milih lokasi panyimpenan, seret lengen robot kanthi manual kanggo ngrampungake tumindak target, banjur tumindak bakal direkam lan disimpen. - Dolanan

Tombol A: Mulai Muter Tindakan sing Direkam
Tombol B: Ngaso
Tombol C: Metu Playback
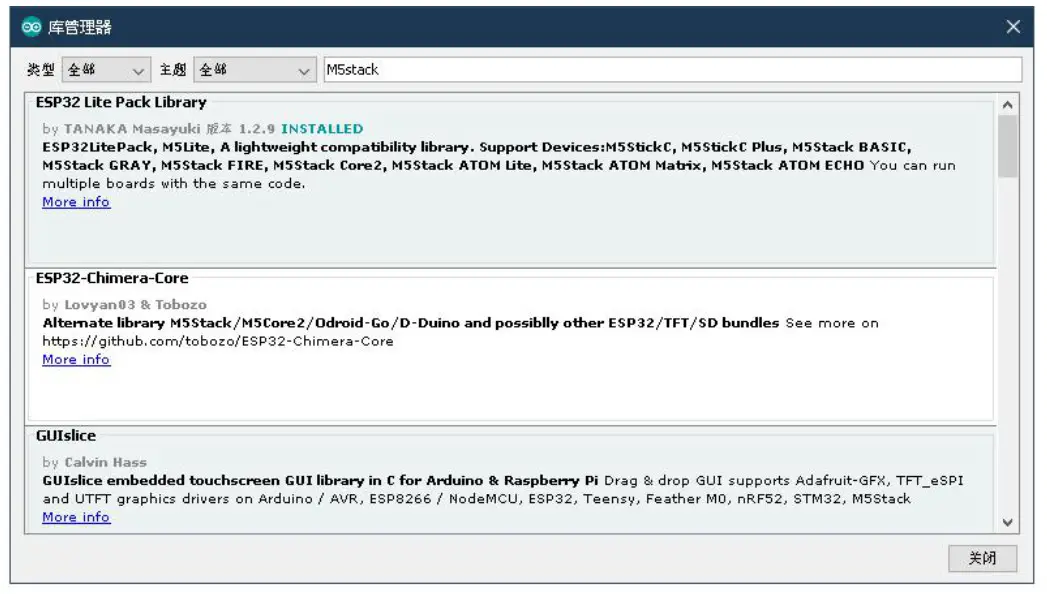
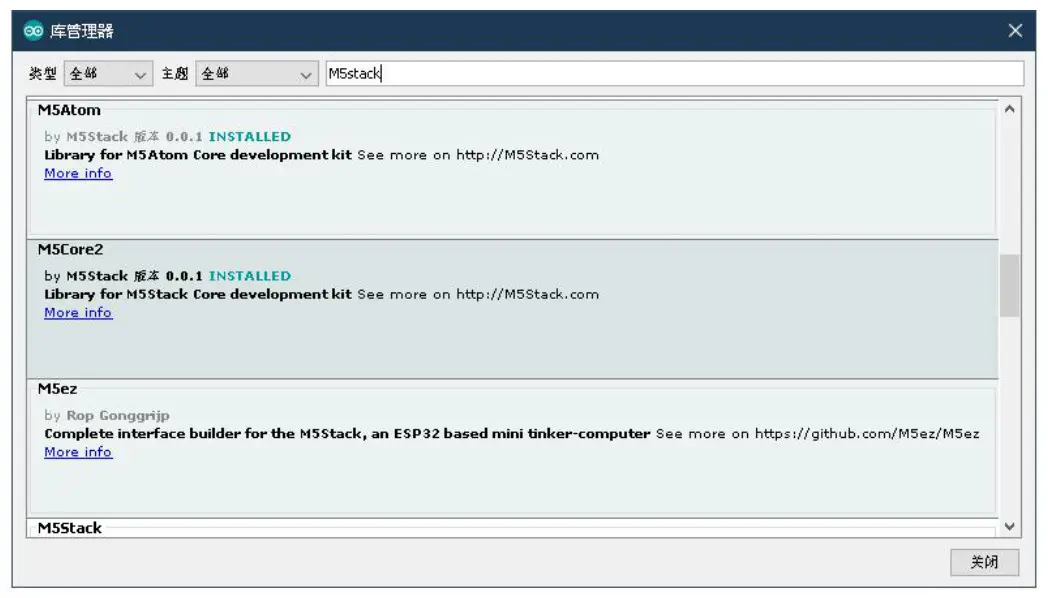
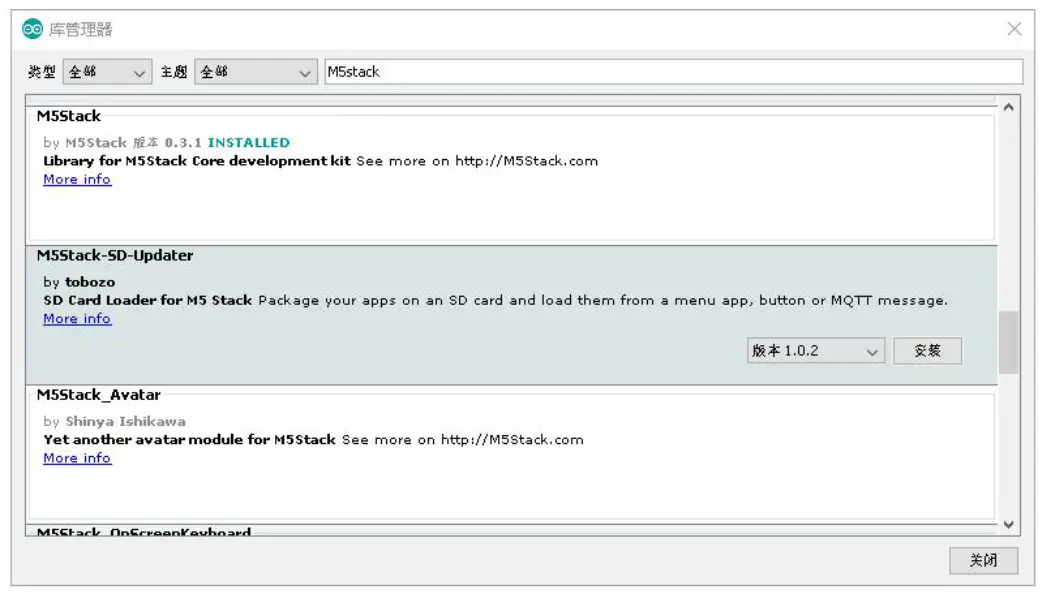
4.3 Pustaka Arduino
Pustaka minangka koleksi kode sing ngidini sampeyan nyambungake lan nggunakake sensor, tampilan, modul, lsp.ample, perpustakaan LiquidCrystal dibangun ing bisa éling komunikasi gampang karo tampilan LCD karakter.
Fungsi Papan pangembangan Arduino bisa ditambahi nalika nggunakake perpustakaan. Amarga saka perpustakaan, kita bisa gampang éling collaboration antarane Arduino lan hardware external utawa komunikasi data. Arduino IDE wis diinstal kanthi seri perpustakaan standar files. Ing wektu sing padha, sampeyan uga bisa nginstal lan ngimpor perpustakaan pihak katelu (kayata perpustakaan open-source sing diundhuh saka Internet) menyang Arduino IDE. Sampeyan malah bisa nggawe perpustakaan lan ngimpor menyang Arduino IDE. Anane perpustakaan mbantu pangguna ngliwati konten sing luwih khusus kayata ndhaptar lan pitunjuk alamat, nyuda kesulitan pangembangan. Yen sampeyan kudu ngerti carane nambah perpustakaan pihak katelu kanggo instalasi ARDUINO IDE, waca alamat instalasi driver lan cara: https://docs.m5stack.com/#/zh_CN/arduino/arduino_development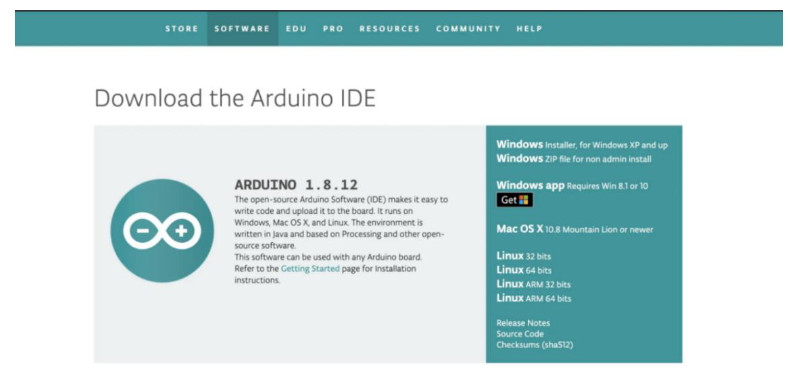 Sampeyan uga bisa mriksa Github kita kanggo informasi luwih lengkap. https://github.com/elephantrobotics/myCobot
Sampeyan uga bisa mriksa Github kita kanggo informasi luwih lengkap. https://github.com/elephantrobotics/myCobot
Kaya ing ngisor iki:
4.4 Antarmuka API lan Komunikasi
- UNIFLOW
- Arduino
- micro python
- FreeROTS
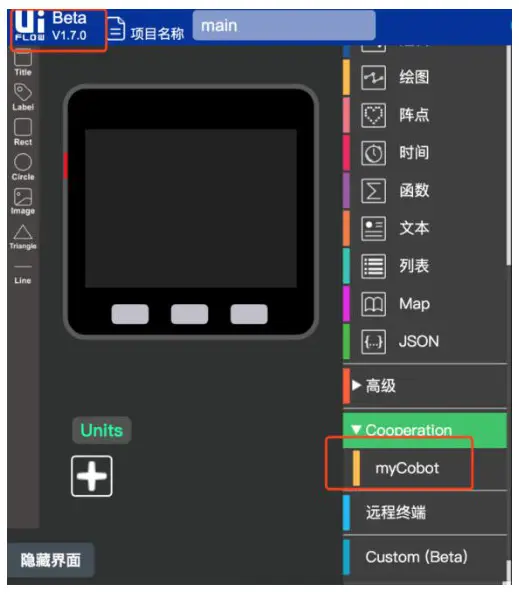
4.4.1 UIFlow
Gunakake UIFlow Beta Versi lan Pilih Kerjasama - mycobiota
https://docs.m5stack.com/#/zh_CN/quick_start/m5core/m5stack_core_get_started_MicroPython
 4.5 ROS
4.5 ROS
ROS lagi dikembangake lan bakal dianyari miturut kemajuan.
Ing 12.31:
- Nganyari persiyapan ROS supaya Python2 utawa 3 saiki bisa diinstal.
- Ganti kanggo ngetik port serial kanthi manual, supaya pangguna Windows bisa langsung mbukak.
- Nganyari dokumen spesifikasi Antarmuka anyar ing Perpustakaan API, goleki "README".
- 4.6 Kalibrasi gabungan
Yen mobot sampeyan kudu kalibrasi sendi, gunakake perangkat kukuh mycobiota utawa Arduino lan alat liyane kanggo ngobong Kalibrasi dhisik.
Sawise ngunggah perangkat kukuh, antarmuka dhasar ditampilake ing ngisor iki:
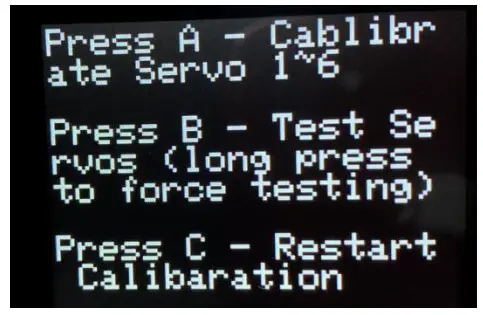
Ing wektu iki, muter J1 menyang posisi nul standar aligning karo alur, lan pencet tombol A (tombol kiwa), banjur J1 bakal pindhah saka gerakan dinamis menyang posisi statis lan didandani kanggo posisi nul standar iki.
Baleni langkah-langkah ing ngisor iki kanggo nyetel J2-J6 sing isih ana. Sawise J6 disetel, pencet tombol A (tombol kiwa) maneh kanggo nyimpen kabeh Setelan.
Nalika kabeh joints bali menyang posisi nul standar, sampeyan uga kudu mriksa apa myCobot bisa operate biasane. Pencet tombol B (tombol tengah), banjur robotku bakal ndeteksi J1 nganti J6 kanthi urutan.
Mangga mesthekake yen ora ana alangan utawa gangguan personel ing jangkoan operasi supaya ora ngrusak peralatan lan personel sajrone tes.
Pemrograman Visual lan Piranti Lunak Industri
5.1 Piranti Lunak Pemrograman Visual-UIFlow
Kanggo panggunaan sing rinci, goleki manual operasi Aliran UI saka link ing ngisor iki.
M5STACK dhasar: https://docs.m5stack.com/#/zh_CN/quick_start/m5core/m5stack_core_get_starte
d_MicroPython
M5STACK Atom: https://docs.m5stack.com/#/zh_CN/quick_start/atom/atom_quick_start_uiflow
5.2 Piranti Lunak Pemrograman Visualisasi Industri-RoboFlow
myCobot ndhukung RoboFlow sing dioperasikake dening robot kolaborasi industri Elephant Robotics. Proses operasi RoboFlow prasaja lan gampang digunakake, lan antarmuka interaktif sing jelas lan gampang dimangerteni, sing trep kanggo pangguna kanthi cepet nguwasani lan nggunakake, lan kanthi efektif mbantu pangguna ngrampungake operasi lan tugas pemrograman kanthi efisien. Malah pangguna anyar uga bisa entuk fungsi target liwat operasi sing gampang.
Kanggo panggunaan rinci, mangga njaluk manual operasi RoboFlow saka link ing ngisor iki.
https://www.elephantrobotics.com/wpcontent/uploads/2019/06/%E6%93%8D%E4%BD%9C%E4%B8%8E%E7%BC%96%E7%A8%8B%E6%
89%8B%E5%86%8C-CN.pdf
Layanan sawise-sales
- Layanan bali diwatesi kanggo barang sing ora dibukak sajrone 7 dina sawise tanggal panrimo logistik produk. Pengangkutan utawa risiko liyane sing ditindakake bakal ditanggung dening pelanggan.
- Pelanggan kudu menehi invoice tuku lan kertu garansi minangka sertifikasi garansi nalika dijaluk garansi.
- Robotik Gajah bakal tanggung jawab kanggo kesalahan hardware produk sing disebabake panggunaan normal sajrone periode garansi.
- Periode babar pisan diwiwiti saka tanggal tuku utawa tanggal panrimo logistik.
- Bagian sing rusak saka produk kasebut bakal diduweni dening Elephant Robotics, lan biaya sing cocog bakal dikenani biaya yen perlu.
Yen sampeyan kudu nglamar layanan garansi, hubungi layanan pelanggan dhisik kanggo konfirmasi informasi sing rinci. Ing ngisor iki minangka syarat garansi kanggo komponen sing rinci:
Cathetan: Yen ana konflik karo Brosur Produk, Manual Panganggo bakal ditrapake.
a) Sever motor
| Periode babar pisan | Layanan Jaminan |
| ≤1 wulan | Robotika Gajah nawakake motor sever anyar gratis lan nggawa barang. |
| 1-3 sasi | Robotika Gajah nawakake motor sever anyar gratis, bea cukai bakal nanggung barang kasebut |
| ≥3 wulan | Pelanggan kudu tuku dhewe. |
b) Suku Cadang Listrik (Perangkat Keras M5)
| Periode babar pisan | Layanan Jaminan |
| ≤3 sasi | Pelanggan kudu ngirim maneh sawise disassembly, Elephant Robotics ngirim sing anyar kanthi gratis lan nggawa barang metu lan mulih. |
| 3-6 sasi | Pelanggan kudu ngirim maneh sawise disassembly lan nanggung barang metu lan ngarep, Robotika Gajah ngirim sing anyar kanthi gratis. |
| ≥6 wulan | Pelanggan kudu tuku dhewe. |
c)Bahan Struktur, kalebu Bagean Cangkang
| Periode babar pisan | Layanan Jaminan |
| ≤1 taun | Robotika Gajah nawakake komponen anyar gratis sapisan, bea cukai bakal nanggung barang kasebut. |
| ≥1 taun | Pelanggan kudu tuku dhewe. |
Sajrone periode garansi produk sing dikirim, perusahaan mung ndandani kerusakan sing kedadeyan sajrone panggunaan normal robot kanthi gratis. Nanging, ing kasus ing ngisor iki, pelanggan bakal dikenani biaya kanggo ndandani (sanajan sajrone periode garansi):
- Karusakan utawa malfungsi sing disebabake panggunaan sing salah lan panggunaan sing ora bener beda karo manual.
- Gagal disebabake disassembly ora sah dening customer.
- Kerusakan sing disebabake dening pangaturan sing ora bener utawa ndandani sing ora sah.
- Kerusakan disebabake bencana alam kayata lindhu lan banjir.
please strictly tindakake pandhuan ing manual iki lan manual related kanggo operate robot.
Q&A:
https://docs.qq.com/sheet/DYkZFRWZOU0hhaWdK?tab=w831xv
P: Compiler ora bisa nemokake piranti sing cocog?
A: Piranti kasebut bisa dikembangake mung sawise nyetel lingkungan pangembangan lan nginstal perpustakaan proyek sing cocog.
P: Compiler ora bisa ngumpulake sample program bener kanggo nemokake piranti sing cocog?
A: Pustaka proyek sing dibutuhake ora diinstal utawa ana konflik karo perpustakaan proyek. Priksa manawa perpustakaan proyek wis diinstal kanthi bener dhisik. Yen wis diinstal kanthi bener nanging isih ora bisa kompilasi, instal maneh lingkungan pangembangan Arduino.
P: Piranti gagal bisa digunakake kanthi bener sawise ngobong perangkat kukuh menyang ATOM?
A: Perangkat kukuh kanggo terminal ATOM kudu nggunakake perangkat kukuh pabrik kita. Yen perangkat kukuh liyane ora sengaja diobong, sampeyan bisa milih "myCobot ATOM ATOMMAIN kanggo ngobong terminal ATOM.
P: Ana wobble tipis ing posisi vertikal nanging ora ing negara gerakan?
A: Mangga priksa manawa robotku ana ing kahanan vertikal. mycobiota ora kena pengaruh gravitasi ing negara vertikal, voidage mechanical bisa nimbulaké wobbles cilik. Nanging ora bakal ana wobbles nalika metu saka negara vertikal. Kacepetan sing disaranake yaiku 400-500 ing negara vertikal.
P: Apa sistem ROS bakal ngisi daya mengko?
A: ROS mbukak sumber lan bakal dianyari menyang Github kita. Ora ana biaya kanggo upgrade firmware.
Hubungi Kita
Yen sampeyan butuh bantuan, hubungi kita ing ngisor iki.
Shenzhen Elephant Robotics Technology Co., Ltd
Alamat: B7, Yungu Innovative Industrial Park 2, Nanshan, Shenzhen, China
Email: support@elephantrobotics.com
Telpon: +86 (0755)-8696-8565 (dina kerja 9:30-18:30)
Websitus: www.elephantrobotics.com
Twitter: CobotMy

Dokumen / Sumber Daya
 |
Elephant Robotics MyCobot Six-Axis Collaborative Robot Arm [pdf] Manual pangguna MyCobot, Lengan Robot Kolaboratif Six-Axis, Lengan Robot Kolaboratif Enam-Axis MyCobot, V20210309 |



